Область техники, к которой относится настоящее изобретение
Настоящее раскрытие относится к лесозаготовительным механизмам на конце стрелы крана лесозаготовительной машины.
Предшествующий уровень техники настоящего изобретения
Во время обычного процесса лесозаготовки, включающего срезание дерева и обрезку сучьев, стрелу крана лесозаготовительной машины направляют к стволу дерева. Харвестерная головка на конце стрелы крана захватывает ствол дерева с помощью гидравлических рычагов или сучкорезных ножей, а также двух или более подающих колес. Пила харвестерной головки переходит к отрезанию ствола дерева. Затем, когда с дерева обрезаны сучья, дерево подают за счет захвата харвестерной головки подающими колесами. Пилу часто используют для дальнейшего отрезания части ствола без сучьев, когда ствол дерева подают на подходящее расстояние с помощью головки ствола дерева.
Одной из основных задач лесозаготовительных машин является производство как можно большего количества полезной древесины при использовании как можно меньшего количества топлива. Во время обычного процесса лесозаготовки, который описан выше, пиле приходится преодолевать значительное трение, когда она перерезает ствол дерева, что приводит к потерям энергии. Дополнительные потери энергии возникают, когда подающие колеса тянут дерево через харвестерную головку для обрезки сучьев. Дополнительно к сопротивлению, испытываемому, когда сучкорезные ножи харвестерной головки перерезают ветви дерева, потерям энергии также способствуют потери при трении, связанные с движущимся деревом, вступающим в контакт с частями харвестерной головки при подаче подающими колесами.
Таким образом, в данной области существует потребность в повышении эффективности работы, в частности энергоэффективности, лесозаготовительных механизмов.
Раскрытие настоящего изобретения
Целью настоящего раскрытия является предоставление харвестерных головок и лесозаготовительных машин для уменьшения или по меньшей мере смягчения некоторых из вышеуказанных проблем.
В настоящем раскрытии предложена лесозаготовительная машина, имеющая стрелу крана, в которой стрела крана содержит харвестерную головку, расположенную на свободном конце стрелы крана. Харвестерная головка содержит пилу и по меньшей мере два подающих колеса. Харвестерная головка дополнительно содержит электродвигатель, выполненный с возможностью приведения в действие пилы и по меньшей мере один электродвигатель, выполненный с возможностью приведения в действие подающих колес. В гидравлических системах, приводимых в действие гидравлическим двигателем, энергия, обеспечиваемая гидравлическим двигателем, зависит от давления гидравлической жидкости и расхода гидравлической жидкости. Поэтому компоненты, имеющие высокие скорости потока гидравлической жидкости при высоких давлениях, обычно являются компонентами, которые имеют наибольшие потери энергии в гидравлических системах. Большая часть потери энергии в харвестерных головках с гидравлическим приводом происходит на пиле и подающих колесах. За счет введения электродвигателей для приведения в действие пилы и подающих колес энергетическая эффективность харвестерной головки, а, следовательно, и лесозаготовительной машины, значительно улучшена по сравнению с обычными харвестерными головками с гидравлическим приводом. Наибольшая разница в потерях энергии между гидравлической системой и электрической системой происходит при низком выходном крутящем моменте. Таким образом, предлагаемая харвестерная головка особенно эффективна по сравнению с обычными харвестерными головками с гидравлическим приводом при низком выходном крутящем моменте электродвигателей. Это становится очевидно, например, при подаче деревьев, имеющих небольшой диаметр ствола дерева, через харвестерную головку, так как подачу деревьев, имеющих небольшой диаметр, обычно выполняют при относительно низком крутящем моменте. Дополнительным преимуществом введения электродвигателей является то, что многие гидравлические шланги, клапаны и гидравлические коллекторы могут быть исключены или уменьшены в размере по сравнению с обычными харвестерными головками с гидравлическим приводом.
Согласно некоторым аспектам лесозаготовительная машина выполнена с возможностью подачи гидравлической жидкости в харвестерную головку через гидравлическое устройство сопряжения харвестерной головки, причем гидравлическая жидкость охлаждает по меньшей мере один из электродвигателей и/или по меньшей мере один инвертирующий усилитель мощности харвестерной головки. За счет использования гидравлического масла из лесозаготовительной машины отпадает необходимость иметь отдельный источник охлаждения харвестерной головки. Это приводит к получению более легкой и более компактной харвестерной головки по сравнению с харвестерной головкой, имеющей выделенный источник охлаждения.
Согласно некоторым аспектам лесозаготовительная машина дополнительно содержит блок управления, выполненный с возможностью управления по меньшей мере одним из электродвигателей и/или функциональным блоком лесозаготовительной машины на основании полученного текущего состояния, относящегося по меньшей мере к одному из электродвигателей. Блок управления обеспечивает автоматическую регулировку для повышения эффективности и снижения риска повреждения при практическом применении лесозаготовительной машины.
Согласно некоторым аспектам лесозаготовительная машина содержит датчик, выполненный с возможностью определения текущего состояния, при этом текущее состояние включает текущий угол вала ротора и/или входную мощность и/или выходную мощность по меньшей мере одного из электродвигателей. Определение текущего состояния обеспечивает эффективное регулирование того, насколько сильно пила прижимается к дереву во время практического применения лесозаготовительной машины. Пила обычно содержит пильную цепь, которая выполнена с возможностью работы в определенных пределах безопасности, например, она может иметь размер для работы только до максимально допустимой выходной мощности. Определение текущего состояния также позволяет регулировать напряжение, испытываемое пилой, тем самым способствуя соблюдению правил безопасности. Путем определения текущего состояния, в частности угла вала электродвигателя, оператору может быть предоставлена информация, способствующая практическому применению. Оператору также может быть предоставлена информация, касающаяся проблем, например, неисправностей, и оказана помощь в принятии мер по преодолению проблем, то есть устранению неисправностей.
Чтобы иметь возможность обеспечить высокий начальный крутящий момент, необходимо знать угол ротора относительно соответствующего статора в каждом случае. Определение угла вала предоставляет необходимую информацию. Подающие колеса могут в таком случае подавать деревья с подставки еще проще по сравнению с подающими колесами, способными обеспечить только низкий начальный крутящий момент. Высокий начальный крутящий момент также может использоваться подающими колесами для обработки более тяжелых деревьев и/или деревьев, имеющих ветви, создающие высокое сопротивление подаче с помощью подающих колес.
Согласно некоторым аспектам блок управления кроме того выполнен с возможностью передачи данных, касающихся текущего состояния, в блок контроля для диагностики и/или выявления неисправностей. Блок управления функционирует как координационный блок и обеспечивает для блока контроля единственное устройство сопряжения, в которое передаются управляющие сигналы.
Согласно некоторым аспектам функциональный блок содержит приводной механизм, выполненный с возможностью регулировки текущего давления пилы на основании выходной мощности текущего состояния. Регулируя текущее давление пилы на основании выходной мощности текущего состояния, можно регулировать механическое напряжение, испытываемое пилой, и, в частности, пильной цепью пилы, обеспечивая, чтобы напряжение оставалось в рамках заданных пределов безопасности.
Согласно некоторым аспектам приводной механизм содержит по меньшей мере один гидравлический цилиндр, гидравлический двигатель или электродвигатель. Приводной механизм обеспечивает вариативность в выборе исполнительного механизма, выполненного с возможностью регулировки давления пилы. Гидравлический цилиндр и/или гидравлический двигатель позволяет повторно использовать значительную часть существующего оборудования устаревших лесозаготовительных машин, основанных на гидравлике. Электродвигатель как часть исполнительного механизма может потенциально быть более энергоэффективным, чем эквивалент на основе гидравлики. Более того, электродвигатель можно легче встраивать в электрическую систему, обеспечивающую электроэнергией другие электродвигатели.
Настоящее раскрытие также относится к системе контроля лесозаготовки, содержащей блок контроля для диагностики и/или выявления неисправностей и лесозаготовительную машину, при этом блок контроля и лесозаготовительная машина связаны с обменом данных. Лесозаготовительной машиной является лесозаготовительная машина согласно настоящему раскрытию. Блок контроля выполнен с возможностью получения данных, относящихся к текущему состоянию по меньшей мере одного из электродвигателей. Блок контроля кроме того выполнен с возможностью проведения диагностики и/или выявления неисправностей на основании полученных данных. Путем контролирования состояния харвестерной головки, в частности угла вала электродвигателя оператору может быть предоставлена информация, способствующая практическому применению. Оператору также может быть предоставлена информация, касающаяся проблем, например, неисправностей, и оказана помощь в принятии мер по преодолению проблем, то есть устранению неисправностей.
Согласно некоторым аспектам лесозаготовительная машина содержит блок управления, выполненный с возможностью управления по меньшей мере одним из электродвигателей и/или функциональным блоком лесозаготовительной машины на основании текущего состояния. Блок управления кроме того выполнен с возможностью получения сигналов управления от блока контроля. Выявление неисправностей на основании полученных данных включает в себя передачу управляющего сигнала, выполненного с возможностью регулировки механической выходной мощности по меньшей мере одного электродвигателя и/или функционального блока лесозаготовительной машины, в блок управления лесозаготовительной машины. Таким образом, система контроля также позволяет частично или полностью автоматизировать практическое применение харвестерной головки. За счет частичной или полной автоматизации практического применения харвестерной головки уменьшается необходимость в квалификации оператора.
Согласно некоторым аспектам блок контроля и лесозаготовительная машина являются отдельными устройствами, которые связаны по беспроводной сети. Контролируя лесозаготовительную машину с использованием внешнего устройства, вычислительная мощность, необходимая для обработки данных, связанных с текущим состоянием по меньшей мере одного из электродвигателей, хранится отдельно от лесозаготовительной машины. Это уменьшает необходимость встраивания компьютерных схем в лесозаготовительную машину. Вместо этого в качестве основы для обеспечения необходимой вычислительной мощности можно использовать существующие аппаратные технологии, например, ноутбук, при этом существующая аппаратная технология выполнена с возможностью получения данных и выполнения диагностики и/или выявления неисправностей на основании полученных данных.
Настоящее раскрытие также относится к харвестерной головке для лесозаготовительной машины, имеющей стрелу крана. Харвестерная головка содержит пилу и по меньшей мере два подающих колеса. Харвестерная головка дополнительно содержит электродвигатель, выполненный с возможностью приведения в действие пилы, и по меньшей мере один электродвигатель, выполненный с возможностью приведения в действие подающих колес. Большая часть потери энергии в харвестерных головках с гидравлическим приводом происходит на пиле и подающих колесах. За счет применения электродвигателя для приведения в действие пилы и подающих колес энергетическая эффективность харвестерной головки значительно улучшена по сравнению с обычными харвестерными головками с гидравлическим приводом.
Наибольшая разница в потере энергии между гидравлической системой и электрической системой происходит при низком выходном крутящем моменте. Предлагаемая харвестерная головка, таким образом, особенно эффективна по сравнению с обычными харвестерными головками с гидравлическим приводом при электродвигателях с низким выходным крутящим моментом. Это становится очевидным, например, при подаче деревьев, имеющих небольшой диаметр ствола, через харвестерную головку, поскольку подача деревьев, имеющих небольшой диаметр, обычно выполняется при относительно низком крутящем моменте. Дополнительным преимуществом применения электродвигателя является то, что многие гидравлические шланги, клапаны и гидравлические коллекторы могут быть исключены или уменьшены в размерах по сравнению с обычными харвестерными головками с гидравлическим приводом.
Согласно некоторым аспектам имеется по меньшей мере два подающих колеса, каждое из которых имеет выделенный электродвигатель, выполненный с возможностью приведения в действие соответствующего подающего колеса. Электродвигатели обычно тяжелее, чем соответствующий гидравлический двигатель. За счет снабжения каждого подающего колеса выделенным двигателем, рабочая нагрузка во время подачи деревьев подающими колесами распределяется на несколько электродвигателей. Это позволяет улучшить соотношение между весом электродвигателя, выполненного с возможностью приведения в действие подающего колеса, и его выходной мощностью. Кроме того, электродвигатели обычно оснащены устройствами, позволяющими определять угол вала ротора соответствующих электродвигателей. Благодаря возможности определять указанный угол в двигателе, минимизируют расстояние между точкой измерения угла вала и фактическим валом. Короткое расстояние между средством измерения угла и валом означает, что можно применять ток, совпадающий по фазе с соответствующим электродвигателем, что, в свою очередь, позволяет точно управлять электродвигателями.
Согласно некоторым аспектам харвестерная головка содержит датчик угла, выполненный с возможностью определения угла вала ротора соответствующего электродвигателя.
Согласно некоторым дополнительным аспектам в соответствующем электродвигателе содержится датчик угла. Чтобы иметь возможность обеспечить высокий начальный крутящий момент, в каждом случае необходимо знать угол ротора относительно соответствующего статора. Датчик угла дает оценку угла. Точность оценок угла при высоких скоростях двигателя обычно уменьшается по мере увеличения расстояния между двигателем и устройством, выполненным с возможностью оценки угла ротора. Интегрируя датчик угла в каждый электродвигатель, точность соответствующей оценки угла соответствующего ротора увеличивается, в частности, при большом числе оборотов двигателя. Улучшенная точность оценки угла позволяет повысить точность управления выходной мощностью электродвигателя. Например, практическое применение пилы можно оптимизировать относительно скорости пиления, что позволяет уменьшить ломку древесины по мере распила дерева, тем самым уменьшая количество отходов.
Согласно некоторым аспектам между каждым подающим колесом и соответствующим электродвигателем, выполненным с возможностью приведения в действие подающих колес, расположена зубчатая передача, причем зубчатая передача выполнена с возможностью обеспечения для коэффициента выходной мощности заданного крутящего момента, причем выходная мощность является выходной мощностью соответствующего электродвигателя, выполненного с возможностью приведения в действие подающего колеса. Зубчатая передача между двигателем и подающим колесом, которое он приводит в действие, обеспечивает подающему колесу необходимый крутящий момент без увеличения размера электродвигателя, т.е. зубчатая передача позволяет сохранять вес электродвигателя на приемлемом уровне.
Согласно некоторым аспектам харвестерная головка содержит гидравлическое устройство сопряжения, выполненное с возможностью подачи гидравлической жидкости из лесозаготовительной машины, причем гидравлическая жидкость охлаждает по меньшей мере один из электродвигателей и/или по меньшей мере один инвертирующий усилитель мощности харвестерной головки. За счет использования гидравлического масла из лесозаготовительной машины, отпадает необходимость иметь отдельный источник охлаждения харвестерной головки. Это приводит к получению более легкой и более компактной харвестерной головки по сравнению с харвестерной головкой, имеющей выделенный источник охлаждения.
Согласно некоторым аспектам между пилой и электродвигателем, выполненным с возможностью приведения в действие пилы, установлена проскальзывающая муфта, при этом проскальзывающая муфта выполнена с возможностью ограничения величины механической мощности, прикладываемой к пиле, так чтобы прикладываемая механическая мощность оставалась ниже заданного предела безопасности. Во время практического применения пилы в движущихся частях пилы образуется значительная кинетическая энергия, обычно в цепи, имеющей распилочные элементы. Когда происходят резкие остановки, движущиеся части испытывают значительное напряжение и риск повреждения. Например, из-за внезапной остановки цепь цепной пилы может быть разорвана на части. Проскальзывающая муфта обеспечивает рассеивание кинетической энергии, не подвергая пилу напряжению, сверх того, что она может выдержать.
Согласно некоторым аспектам ротор электродвигателя, выполненного с возможностью приведения в действие пилы, имеет момент инерции, выбранный для предотвращения повреждения цепи пилы из-за напряжения, связанного с передачей кинетической энергии на пильную цепь во время резкой остановки электродвигателя, выполненного с возможностью приведения в действие пилы. Таким образом, ротор будет достаточно легким, чтобы предотвратить разрыв цепи пилы из-за передачи кинетической энергии на пильную цепь в связи с внезапной остановкой двигателя.
Согласно некоторым аспектам харвестерная головка дополнительно содержит блок управления, выполненный с возможностью управления по меньшей мере одним из электродвигателей и/или функциональным блоком харвестерной головки на основании полученного текущего состояния по меньшей мере одного из электродвигателей. Блок управления имеет все технические результаты соответствующего блока управления, описанного выше относительно лесозаготовительных машин.
Настоящее раскрытие также относится к способу управления работой харвестерной головки, содержащей пилу, управляемую первым электродвигателем, и по меньшей мере два подающих колеса, управляемых по меньшей мере одним вторым электродвигателем. Способ предусматривающий определение текущего состояния относительно по меньшей мере одного из первого и по меньшей мере одного второго электродвигателей и управление по меньшей мере одним из первого и по меньшей мере одним из второго электродвигателя и/или функционального блока харвестерной головки на основании текущего состояния. Этапы способа соответствуют действиям, выполняемым компонентами либо лесозаготовительной машины, системы контроля лесозаготовки, либо харвестерной головки, как обсуждалось выше, и имеют все связанные с этим результаты и преимущества.
Настоящее раскрытие также относится к компьютерной программе, содержащей компьютерный программный код, который при выполнении в элементе, связанном с обменом данными с харвестерной головкой, содержащей пилу, управляемую первым электродвигателем, и по меньшей мере два подающих колеса, управляемых по меньшей мере одним вторым электродвигателем, заставляет элемент выполнять этапы способа управления работой харвестерной головки. Компьютерная программа обладает всеми преимуществами раскрытого способа управления работой харвестерной головки.
Настоящее раскрытие также относится к способу контроля работы лесозаготовительной машины, причем лесозаготовительная машина содержит харвестерную головку, содержащую пилу, управляемую первым электродвигателем, и по меньшей мере два подающих колеса, управляемых по меньшей мере одним вторым электродвигателем. Способ предусматривает получение данных, относящихся к текущему состоянию по меньшей мере одного из электродвигателей, и проведение диагностики и/или выявление неисправностей на основании полученных данных. Этапы способа соответствуют действиям, выполняемым компонентами либо лесозаготовительной машины, либо системы контроля лесозаготовки, либо харвестерной головки, как обсуждалось выше, и имеют все связанные с этим результаты и преимущества.
Настоящее раскрытие также относится к компьютерной программе, содержащей компьютерный программный код, который при выполнении в элементе, связанном с обменом данными с лесозаготовительной машиной, заставляет элемент выполнять этапы
способа контроля работы лесозаготовительной машины. Компьютерная программа обладает всеми преимуществами раскрытого способа контроля работы лесозаготовительной машины.
Краткое описание фигур
На Фиг.1 показана лесозаготовительная машина согласно настоящему раскрытию.
На Фиг.2a и 2b показана система контроля лесозаготовки согласно настоящему раскрытию;
На Фиг.3 показана харвестерная головка согласно настоящему раскрытию;
На Фиг.4 показаны этапы способа управления работой харвестерной головки согласно настоящему раскрытию; и
На Фиг.5 показаны этапы способа контроля работы лесозаготовительной машины согласно настоящему раскрытию.
Подробное описание настоящего изобретения
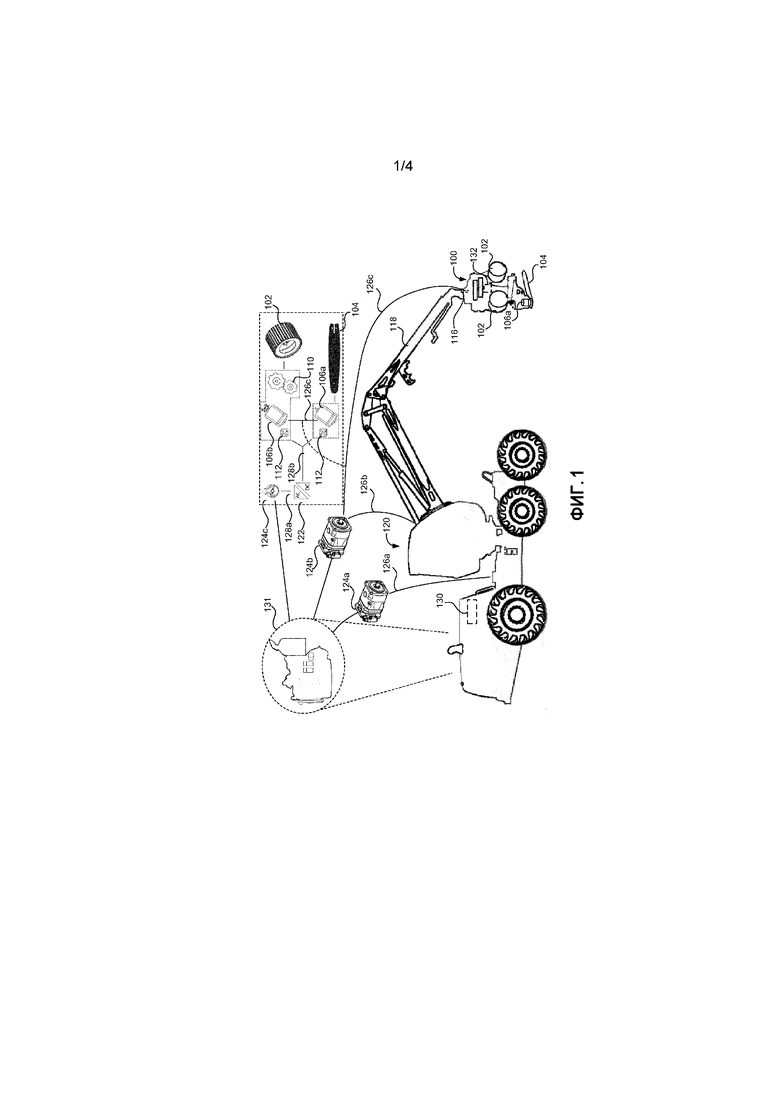
На Фиг.1 показана лесозаготовительная машина 120 согласно настоящему раскрытию. Лесозаготовительная машина 120 имеет стрелу 118 крана, при этом стрела 118 крана содержит харвестерную головку 100 расположенную на свободном конце стрелы крана. Харвестерная головка 100 содержит пилу 104 и два подающих колеса 102. Харвестерная головка 100 дополнительно содержит электродвигатель 106a, выполненный с возможностью приведения в действие пилы 104. Два подающих колеса 102 каждое имеет выделенный электродвигатель 106b, выполненный с возможностью приведения в действие соответствующего подающего колеса 102. Лесозаготовительная машина 120 содержит двигатель 131, например, дизельный двигатель. Лесозаготовительная машина 120 дополнительно содержит первый и второй гидравлические насосы 124a, 124b, и электрический генератор 124c. Первый и/или второй гидравлические насосы 124a, 124b и/или электрический генератор 124c могут приводиться в действие двигателем 131. Электрический генератор 124c выполнен с возможностью подачи переменного тока, AC, через первый интерфейс 128а электропитания. Устройство дифференциального тока, УЗО, может быть расположено сразу после электрического генератора 124с, чтобы защитить людей от случайного травмирования себя ударом большого тока от электрического генератора 124с. Выпрямитель 122 выполнен с возможностью получения переменного тока от первого интерфейса 128a электропитания и преобразования его в постоянный ток, DC, с заданным напряжением. Постоянный ток затем можно использовать для питания всех или большинства электрических компонентов лесозаготовительной машины 120. В частности, постоянный ток выполнен с возможностью подачи в электродвигатели 106a, 106b через второй интерфейс 128a электропитания. Каждый электродвигатель 106a, 106b содержит инвертирующий усилитель 112 мощности, выполненный с возможностью преобразования постоянного тока в переменный ток, который используется для приведения в действие электродвигателей 106a, 106b.
Электродвигатель часто выполнен с возможностью приведения в действие вала ротора путем подачи тока к полюсам ротора и/или статора. Вал может быть окружен полюсами, которые выполнены с возможностью создания магнитного поля в ответ на приложенный ток. Когда полюс создает магнитное поле, ротор вращается в ответ на генерируемое электрическое поле. Таким образом, механизм, который используется для приведения в действие двигателя, также может использоваться для определения текущего угла поворота ротора относительно статора, т.е. угла вала. Поскольку инвертирующие усилители 112 мощности выполнены с возможностью снабжения электродвигателя переменным током, инвертирующие усилители 112 мощности можно использовать для непрерывного измерения приложенного тока и определения положения ротора относительно соответствующего статора. Другими словами, каждый инвертирующий усилитель 112 мощности выполнен с возможностью определения угла вала ротора соответствующего электродвигателя 106a, 106b. Согласно некоторым аспектам каждый инвертирующий усилитель 112 мощности двигателей 106a, 106b содержит датчик угла, выполненный с возможностью определения указанного угла. Это позволяет каждому инвертирующему усилителю 112 мощности подавать ток в фазе с соответствующим электродвигателем 106a, 106b. Благодаря возможности подачи тока в фазе с соответствующим электродвигателем 106а, 106b, электродвигателями 106a, 106b можно управляться с высокой степенью точности, например, намного выше, чем обычными гидравлическими двигателями. Высокая степень точности управления электродвигателями 106a, 106b позволяет использовать различные входные и/или выходные параметры для управления электродвигателями 106, 106b.
Таким образом, согласно некоторым аспектам лесозаготовительная машина 120 содержит датчик 132, выполненный с возможностью определения текущего состояния, и при этом текущее состояние включает текущий угол вала ротора и/или входную мощность и/или выходную мощность по меньшей мере одного из электродвигателей 106a, 106b. Текущее состояние затем может быть использовано для управления электродвигателями 106a, 106b.
Для получения высокого крутящего момента необходимо знать угол вала ротора электродвигателя 106а, 106b. Поскольку двигатель 106a, 106b обычно работает на высоких скоростях, измеряемых в оборотах в минуту, RPM, угол тем сложнее определить, чем дальше от электродвигателя 106a, 106b находится измерительное устройство, выполненное с возможностью измерения угла. Таким образом, измеряя угол вала на каждом электродвигателе 106a, 106b, используя либо электродвигатели 106a, 106b самостоятельно, либо используя датчик угла на инвертирующих усилителях 112 мощности, делают минимальным расстояние между измерительным устройством и электродвигателем 106a, 106b.
Лесозаготовительная машина 120 может дополнительно содержать блок 130 управления, выполненный с возможностью управления по меньшей мере одним из электродвигателей 106a, 106b и/или функциональным блоком лесозаготовительной машины на основании полученного текущего состояния, относящегося по меньшей мере к одному из электродвигателей 106a, 106b. Текущим состоянием может быть, например, входная мощность, выходная мощность или угол ротора по отношению к статору. Угол ротора по отношению к статору часто измеряют на основе угла вала ротора. Информацию, относящуюся к текущему состоянию, можно получить любым из вышеупомянутых средств. Функциональный блок может содержать приводной механизм. Приводной механизм может содержать по меньшей мере одно из: гидравлического цилиндра, гидравлического двигателя или электродвигателя.
Дополнительно к использованию информации, относящейся к текущему состоянию, для управления электродвигателями 106a, 106b, информацию также можно использовать с целью диагностики и/или выявления неисправностей. Таким образом, согласно некоторым аспектам блок 130 управления кроме того выполнен с возможностью передачи данных, относящихся к текущему состоянию, в блок контроля для диагностики и/или выявления неисправностей.
Например, если пила 104 содержит пильную цепь, которая имеет возможность пилить только со скоростью не более 40 м/с, пилой можно управлять так, чтобы она работала с желаемой выходной мощностью, например, 50 кВт, со скоростью двигателя, которая гарантирует, что пильная цепь не превышает скорость пиления в 40 м/с.
Выходная мощность и напряжение, испытываемые цепью пилы, также зависят от давления, испытываемого пилой 104, когда пила 104 прижимается к дереву во время пиления. Таким образом, согласно некоторым аспектам функциональный блок содержит приводной механизм, выполненный с возможностью регулировки текущего давления пилы 104 на основании текущего состояния выходной мощности. Текущим давлением пилы 104 может быть давление клапанов или гидравлических цилиндров, выполненных с возможностью регулировки, насколько сильно пила 104 должна прижиматься к дереву. Текущее давление пилы 104 может представлять собой нагрузку электродвигателя приводного механизма, при этом электродвигатель приводного механизма выполнен с возможностью регулировки, насколько сильно пила 104 должна прижиматься к дереву.
Электродвигатель часто бывает тяжелее, чем соответствующий гидравлический двигатель и, следовательно, желательно найти способы оптимизации соотношения между весом электродвигателя и выходной мощностью электродвигателя. Один способ улучшить соотношение между весом и выходной мощностью состоит в использовании относительно легковесных электродвигателей, которые работают на высоких скоростях во время практического применения лесозаготовительной машины 120. Однако легковесный электродвигатель может быть не в состоянии обеспечить необходимый крутящий момент, требуемый для работы лесозаготовительной машины 120. Таким образом, согласно некоторым аспектам, зубчатая передача 110 расположена между каждым подающим колесом 102 и соответствующим электродвигателем 106b для обеспечения заданного крутящего момента на подающем колесе 102 на основе заданной выходной мощности соответствующего электродвигателя 106b, выполненного с возможностью приведения в действие подающих колес 102.
Первый насос 124a выполнен с возможностью предоставления гидравлической энергии для продвижения лесозаготовительной машины 120 через первое гидравлическое устройство 126a сопряжения. Второй насос 124b выполнен с возможностью предоставления гидравлической энергии для работы стрелы 118 крана через второе гидравлическое устройство 126a сопряжения и кроме того выполнен с возможностью подачи гидравлической жидкости в харвестерную головку 100 через третье гидравлическое устройство 126a сопряжения, причем гидравлическая жидкость охлаждает электродвигатели 106a, 106b и инвертирующие усилители 112 мощности. Третье гидравлическое устройство 126a сопряжения может быть кроме того выполнено с возможностью подачи гидравлической жидкости в харвестерную головку 100 через гидравлическое устройство 116 сопряжения харвестерной головки 100. Согласно аспекту, механизм охлаждения гидравлической жидкости выполнен с возможностью подачи гидравлической жидкости так, что температура гидравлической жидкости не превышает заданную максимальную температуру. Согласно аспекту, гидравлическая охлаждающая жидкость берется непосредственно из трубопровода под давлением лесозаготовительной машины 120 через редуктор. Согласно другому аспекту гидравлическая охлаждающая жидкость подается по отдельному трубопровода подачи без давления.
Во время практического применения лесозаготовительной машины 120 трение между стволом дерева и харвестерной головкой 100 обычно бывает достаточно для того, чтобы действовать как тормоз. В некоторых случаях может потребоваться механизм торможения харвестерной головки, например, при подаче ствола, свободного от ветвей, под наклоном. Аспект динамического тормоза в таком случае достигается путем размещения выпрямителя 122 и инвертирующих усилителей 112 мощности, чтобы они могли функционировать и как выпрямитель, и как инвертирующий усилитель мощности. Электродвигатели 106b, управляющие подающими колесами 102, тогда можно использовать в качестве электрических генераторов. Генерируемый ток передается на двигатель 131 через электрический генератор 124с, находящийся в электрическом контакте с двигателем 131, для питания двигателя 131 и связанных с ним потребляющих устройств.
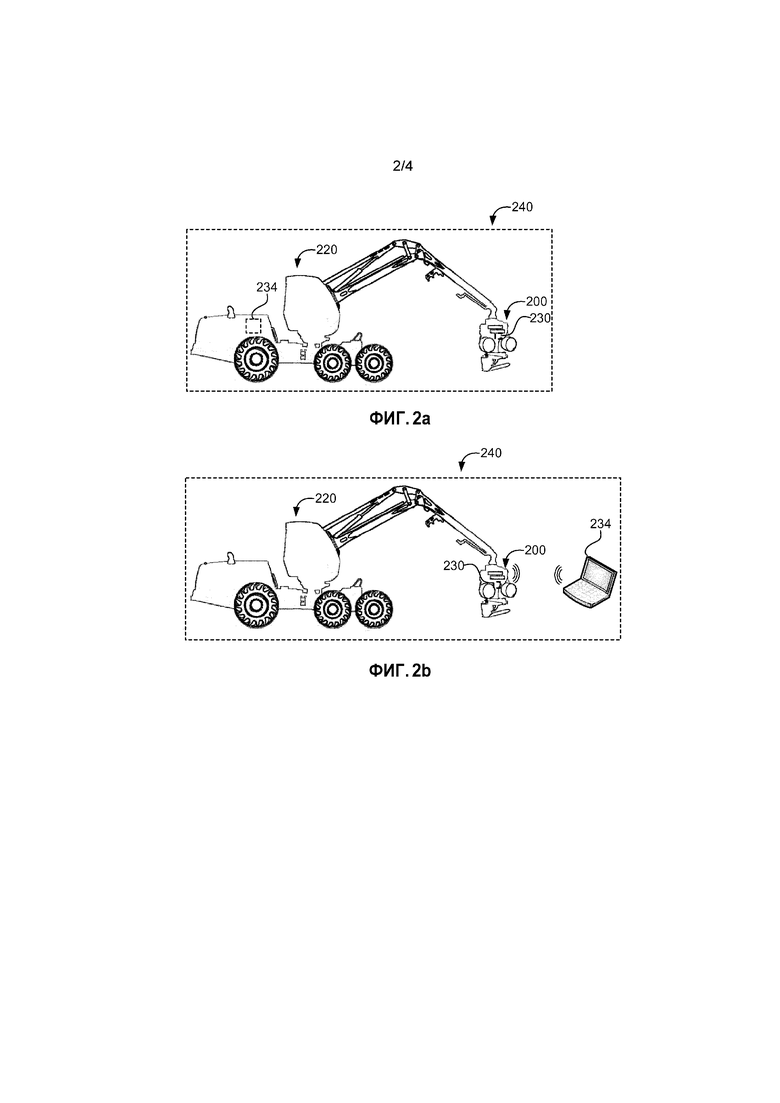
На Фиг.2a и 2b показаны системы 240 контроля лесозаготовки согласно настоящему раскрытию.
Каждая система 240 контроля лесозаготовки содержит блок 234 контроля для диагностики и/или выявления неисправностей и лесозаготовительную машину 220. Блок 234 контроля и лесозаготовительная машина 220 связаны с обменом данных. Лесозаготовительной машиной 220 является лесозаготовительная машина 220 согласно настоящему раскрытию. Блок 234 контроля выполнен с возможностью получения данных, относящихся к текущему состоянию по меньшей мере одного из электродвигателей. Блок 234 контроля также выполнен с возможностью проведения диагностики и/или выявление неисправностей на основании полученных данных.
Возможность проведения диагностики и/или выявления неисправностей может привести к значительной экономии времени. Блок 234 контроля может быть выполнен с возможностью непрерывного предоставления оператору информации, относящейся к текущему состоянию лесозаготовительной машины 220. Диагностика и/или выявление неисправностей могут относиться к текущему состоянию одного или более электродвигателей. Например, блок контроля может быть выполнен с возможностью контролирования выходной мощности и давления, оказываемого на пилу харвестерной головки 200 во время пиления. Информация, касающаяся выходной мощности и давления, оказываемого на пилу, может быть затем диагностирована, чтобы определить, следует ли регулировать давление, оказываемое пилой на дерево, и, следовательно, давление, оказываемое на пилу. Согласно некоторым аспектам, блок контроля выполнен с возможностью получения данных, касающихся скорости электродвигателя. Скорость электродвигателя затем можно использовать в сочетании с информацией, касающейся выходной мощности электродвигателя, чтобы определить, происходит ли свободное вращение. Например, высокая скорость электродвигателя, выполненного с возможностью приведения в действие подающих колес в сочетании с низкой выходной мощностью, может указывать на то, что подающие колеса вращаются против направления дерева, не двигая его. Точно так же высокая скорость электродвигателя, выполненного с возможностью приведения в действие пилы, в сочетании с низкой выходной мощностью, может указывать на то, что пила работает, но не врезается в дерево.
Дополнительно к проведению диагностики и/или устранению неисправностей может быть желательно выполнить автоматические действия в ответ на полученные или извлеченные данные. Следовательно, лесозаготовительная машина 220 может также содержать блок 230 управления, выполненный с возможностью управления по меньшей мере одним из электродвигателей и/или функциональным блоком лесозаготовительной машины на основании текущего состояния. Согласно некоторым дополнительным аспектам, блок 230 управления расположен на харвестерной головке 200. Блок 230 управления кроме того выполнен с возможностью получения сигналов управления от блока 234 контроля. Выявление неисправностей на основании полученных данных включает в себя передачу сигнала управления, предназначенного для регулирования механической выходной мощности по меньшей мере одного электродвигателя и/или функционального блока лесозаготовительной машины в блок 230 управления лесозаготовительной машины 220.
Блок 230 управления может быть выполнен с возможностью автоматической регулировки затем давления, оказываемого на пилу, или скорости любого из электродвигателей в описанных выше ситуациях. Блок 230 управления может дополнительно быть выполнен с возможностью оказания помощи неопытным операторам. Например, блок 230 управления может быть выполнен с возможностью обеспечения подачи дерева через харвестерную головку 200 с заданным скоростным интервалом. Согласно некоторым аспектам блок 230 управления выполнен с возможностью подачи дерева на заданное расстояние посредством управления электродвигателями, выполненными с возможностью приведения в действие подающих колес. Согласно некоторым аспектам блок 230 управления выполнен с возможностью поддержания заданного интервала скорости и заданной выходной мощности электродвигателя, выполненного с возможностью приведения в действие пилы, одновременно сохраняя давление, оказываемое на пилу, в рамках заданного интервала.
Может быть интересно хранить информацию, проходящую через систему контроля лесозаготовки 240, или обрабатывать информацию с использованием вычислительных ресурсов, которые имеют большую вычислительную мощность, чем обычно в лесозаготовительных машинах. Таким образом, согласно некоторым аспектам блок 234 контроля и лесозаготовительная машина 220 являются отдельными устройствами, которые связаны по беспроводной сети. Согласно некоторым дополнительным аспектам, блок 230 управления расположен в блоке 234 контроля. За счет отделения блока 234 контроля от лесозаготовительной машины 220 блок 234 контроля можно установить с возможностью удовлетворения требований по хранению и вычислительным требованиям системы контроля без необходимости перенастройки лесозаготовительной машины 220. Кроме того, блок 234 контроля не подвергается нагрузкам, испытываемым лесозаготовительной машиной 220, например, вибрации, которые могут повредить чувствительную схему. Благодаря разделению лесозаготовительной машины 220 и блока 234 контроля другой человек, кроме оператора лесозаготовительной машины, может контролировать практическое применение лесозаготовительной машины 220. Это в частности полезно, например, при обучении неопытного персонала, когда опытный пользователь может контролировать практическое применение удаленно и предпринимать соответствующие действия, например, на основе информации о диагностике и/или выявлении неисправностей, предоставляемой блоком 234 контроля.
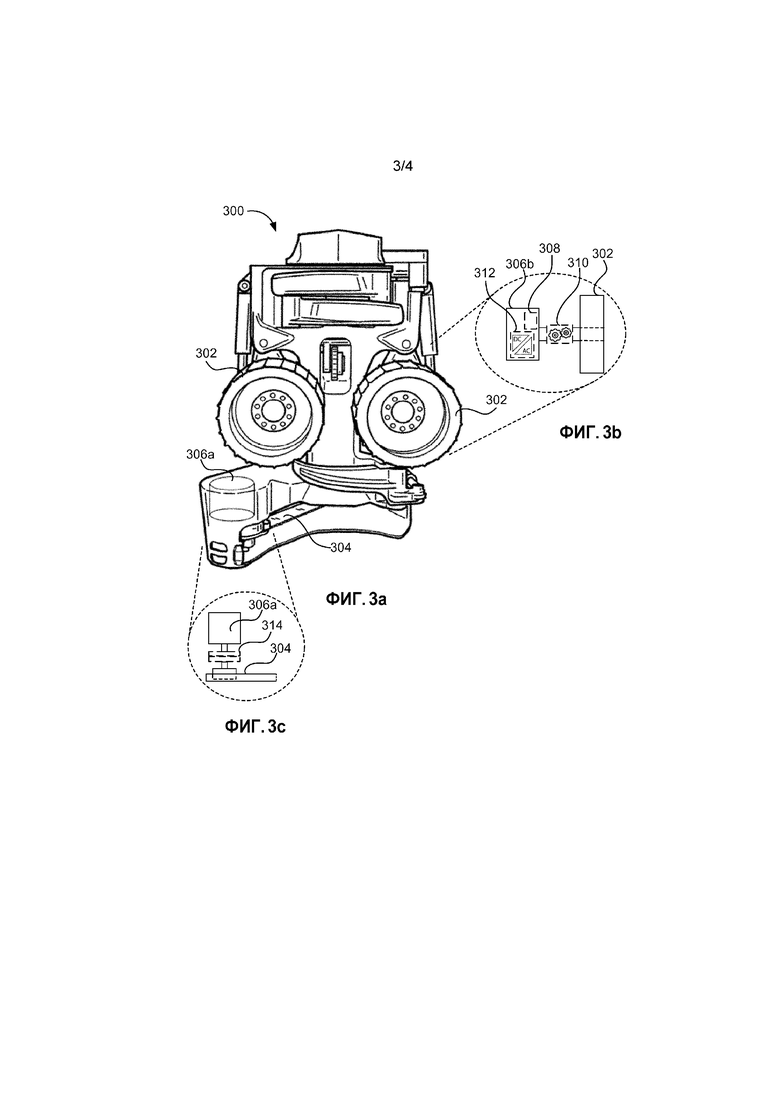
На Фиг.3 показана харвестерная головка 300 для лесозаготовительной машины, имеющей стрелу крана. Харвестерная головка 300 содержит пилу 304 и по меньшей мере два подающих колеса 302. Харвестерная головка 300 дополнительно содержит электродвигатель 306a, выполненный с возможностью приведения в действие пилы 304, и по меньшей мере один электродвигатель 306b, выполненный с возможностью приведения в действие подающих колес 302. Основная потеря энергии в харвестерных головках с гидравлическим приводом происходит на пиле и на подающих колесах. За счет введения электродвигателей для приведения в действие пилы и подающих колес энергетическая эффективность харвестерной головки, а, следовательно, и лесозаготовительной машины, значительно улучшена по сравнению с обычными харвестерными головками с гидравлическим приводом.
Энергетическую эффективность можно дополнительно улучшить за счет оптимизации соотношения между весом электродвигателей и их выходной мощностью. Таким образом, согласно некоторым аспектам, по меньшей мере два подающих колеса 302 каждое имеет выделенный электродвигатель 306b, выполненный с возможностью приведения в действие соответствующего подающего колеса 302. Разделение рабочей нагрузки между несколькими электродвигателями 306b позволяет более эффективно задавать размеры электродвигателей 306b, чем если бы только один электродвигатель был выполнен с возможностью приведения в действие всех подающих колес 302.
Как было описано выше со ссылкой на фиг.1, может быть желательно определять текущее состояние электродвигателей 306а, 306b. Таким образом, согласно некоторым аспектам харвестерная головка 300 содержит датчик 308 угла, выполненный с возможностью определения угла вала ротора соответствующего электродвигателя. Согласно некоторым дополнительным аспектам, датчик 308 угла расположен в соответствующем электродвигателе.
Чтобы иметь возможность сохранять небольшой вес электродвигателей 306а, 306b, в то же время обеспечивая высокую выходную мощность, между каждым подающим колесом 302 и соответствующим электродвигателем 306b, выполненным с возможностью приведения в действие подающих колес 302, может быть расположена зубчатая передача 310. Зубчатая передача 310 выполнена с возможностью обеспечения заданного крутящего момента для коэффициента выходной мощности, причем выходной мощностью является выходная мощность соответствующего электродвигателя, выполненного с возможностью приведения в действие подающих колес 302.
Во время практического применения харвестерной головки 300 от электродвигателей 306a, 306b и любых инвертирующих усилителей 312 мощности харвестерной головки 300 исходит тепло. Чтобы предотвратить накопление слишком большого количества тепла, харвестерная головка 300 может содержать гидравлическое устройство сопряжения, выполненное с возможностью подачи гидравлической жидкости из лесозаготовительной машины, причем гидравлическая жидкость охлаждает по меньшей мере один из электродвигателей 306a, 306b и/или по меньшей мере один инвертирующий усилитель 312 мощности харвестерной головки 300.
Во время практического применения харвестерной головки 300 пила 304 иногда подвергается резким остановкам. Из-за большой кинетической энергии, создаваемой в движущихся частях пилы во время практического применения, резкая остановка нанесет значительный удар по пиле. Особым риском для цепных пил является риск разрыва цепи из-за напряжения движущих цепь частей, имеющих большую кинетическую энергию, которая рассеивается через цепь. Для уменьшения риска повреждения, а так же для уменьшения износа как пилы 304, так и электродвигателя 306a, приводящего в действие пилу 304, между пилой 304 и электродвигателем 306a, выполненным с возможностью приведения в действие пилы 304, может быть расположена проскальзывающая муфта 314, причем проскальзывающая муфта 314 выполнена с возможностью ограничения величины механической мощности, прикладываемой к пиле так, чтобы прикладываемая механическая мощность оставалась ниже заданного предела безопасности.
Как было пояснено выше, кинетическая энергия может нанести вред пиле 304 и/или электродвигателю 306a из-за резких остановок. Если ротор электродвигателя 306a относительно легкий, он несет меньшую кинетическую энергию при заданной скорости по сравнению с более тяжелым ротором, вращающимся с той же скоростью. Меньшая кинетическая энергия подразумевает снижение риска повреждения, а также снижение износа. Таким образом, согласно некоторым аспектам ротор электродвигателя 306a, выполненного с возможностью приведения в действие пилы 304, имеет момент инерции, выбранный для предотвращения повреждения цепи пилы 304 из-за напряжения, связанного с передачей кинетической энергии на пильную цепь во время резкой остановки электродвигателя 306a, выполненного с возможностью приведения в действие пилы 304.
На Фиг.1 и 2 описаны различные блоки управления с соответствующими связанными техническими эффектами. Многие из наиболее важных компонентов лесозаготовительной машины или системы, содержащей харвестерную головку согласно настоящему раскрытию, расположены на харвестерной головке. Для уменьшения расстояния передачи сигнала между критическими компонентами и блоком управления может быть полезно организовать блок управления на харвестерной головке. Таким образом, согласно некоторым аспектам, харвестерная головка 300 содержит блок управления, выполненный с возможностью управления по меньшей мере одним из электродвигателей и/или функциональным блоком харвестерной головки на основании полученного текущего состояния, относящегося по меньшей мере к одному из электродвигателей. Расположение блока управления на харвестерной головке может также уменьшить количество потенциальных точек отказа между блоком управления и компонентами харвестерной головки 300.
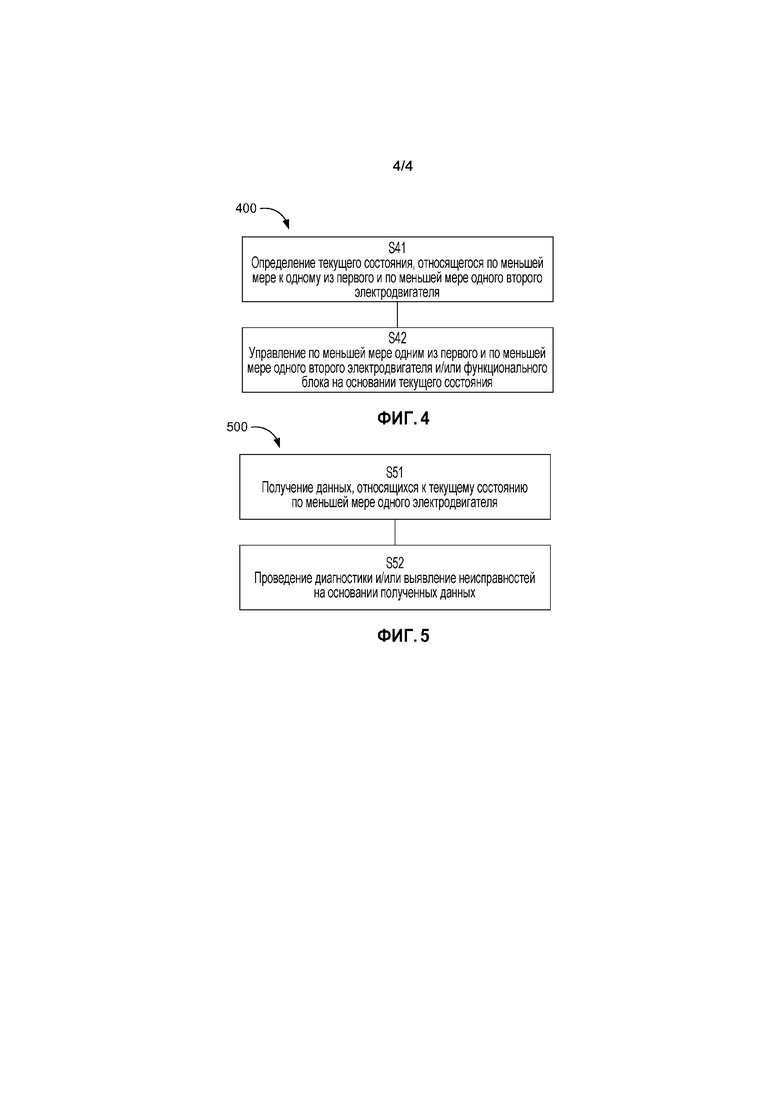
На Фиг.4 показаны этапы способа 400 для управления работой харвестерной головки, содержащей пилу, управляемую первым электродвигателем, и по меньшей мере два подающих колеса, управляемых по меньшей мере одним вторым электродвигателем. Способ 400 предусматривает определение S41 текущего состояния, относящегося по меньшей мере к одному из первого и по меньшей мере одному из второго электродвигателя, и управление S42 по меньшей мере одним из первого и по меньшей мере одним из второго электродвигателя и/или функциональным блоком харвестерной головки на основании текущего состояния. Этапы метода соответствуют действиям, выполняемым компонентами либо лесозаготовительной машины, либо системы контроля лесозаготовки, либо харвестерной головки, как обсуждалось выше, и имеют все связанные с этим результаты и преимущества.
Настоящее раскрытие также относится к компьютерной программе, содержащей компьютерный программный код, который, при выполнении его элементом, коммуникативно связанным с харвестерной головкой, содержащей пилу, управляемую первым электродвигателем, и по меньшей мере два подающих колеса, управляемые по меньшей мере одним вторым электродвигателем, заставляет элемент выполнять этапы способа управления работой харвестерной головки. Элемент может содержать блок управления харвестерной головки и/или блок контроля системы контроля лесозаготовки и/или блок управления лесозаготовительной машины. Единицы элемента, то есть любой блок (блоки) управления и блоки контроля, содержащиеся в элементе, прямо или косвенно связаны с обменом данными по меньшей мере с одним из электродвигателей и выполнены с возможностью управления указанным по меньшей мере одним из электродвигателей.
На Фиг.5 показаны этапы способа 500 контроля работы лесозаготовительной машины, причем лесозаготовительная машина содержит харвестерную головку, содержащую пилу, управляемую первым электродвигателем, и по меньшей мере два подающих колеса, управляемых по меньшей мере одним вторым электродвигателем. Способ 500 предусматривает получение S51 данных, относящихся к текущему состоянию по меньшей мере одного из электродвигателей, и проведение S52 диагностики и/или выявления неисправностей на основании полученных данных. Этапы способа соответствуют действиям, выполняемым компонентами либо лесозаготовительной машины, либо системы контроля лесозаготовки, либо харвестерной головкой, как обсуждалось выше, и имеют все связанные с этим результаты и преимущества.
Настоящее раскрытие также относится к компьютерной программе, содержащей компьютерный программный код, который, при выполнении его элементом, коммуникативно связанным с лесозаготовительной машиной, заставляет элемент выполнять этапы способа контроля работы лесозаготовительной машины. Указанный элемент может содержать блок управления харвестерной головкой и/или блок контроля системы контроля лесозаготовки и/или блок управления лесозаготовительной машины. Единицы элемента, то есть любой блок (блоки) управления и блоки контроля, содержащиеся в элементе, прямо или косвенно связаны с обменом данных по меньшей мере с одним из электродвигателей и выполнены с возможностью управления указанным по меньшей мере одним из электродвигателей.
Настоящее изобретение относится к лесозаготовительной машине, имеющей стрелу крана, причем стрела крана содержит харвестерную головку, расположенную на свободном конце стрелы крана. Харвестерная головка содержит пилу и по меньшей мере два подающих колеса. Кроме того, харвестерная головка содержит электродвигатель, выполненный с возможностью приведения в действие пилы, и по меньшей мере однин электродвигатель, выполненный с возможностью приведения в действие подающих колес. Настоящее изобретение также относится к связанным системам контроля лесозаготовки, харвестерным головкам и способам управления работой харвестерной головки и контроля работы лесозаготовительной машины. Предложенные изобретения позволят повысить эффективность работы. 5 н. и 14 з.п. ф-лы, 8 ил.
1. Лесозаготовительная машина (120; 220), имеющая стрелу (118) крана, при этом стрела (118) крана содержит харвестерную головку (100; 200), расположенную на свободном конце стрелы (118) крана, отличающаяся тем, что харвестерная головка (100; 200) содержит пилу (104) и по меньшей мере два подающих колеса (102), и тем, что харвестерная головка (100) дополнительно содержит электродвигатель (106a), выполненный с возможностью приведения в действие пилы (104), и по меньшей мере один электродвигатель (106b), выполненный с возможностью приведения в действие подающих колес (102), при этом лесозаготовительная машина (120; 220) дополнительно содержит блок (130; 230) управления, выполненный с возможностью управления по меньшей мере одним из электродвигателей (106a, 106b) и/или приводным механизмом лесозаготовительной машины (120; 220) на основании полученного текущего состояния, относящегося по меньшей мере к одному из электродвигателей (106a, 106b).
2. Лесозаготовительная машина (120; 220) по п. 1, отличающаяся тем, что лесозаготовительная машина (120; 220) выполнена с возможностью подачи гидравлической жидкости в харвестерную головку (100; 200) через гидравлическое устройство (116) сопряжения харвестерной головки (100; 200), причем гидравлическая жидкость охлаждает по меньшей мере один из электродвигателей (106a, 106b) и/или по меньшей мере один инвертирующий усилитель (112) мощности харвестерной головки (100; 200).
3. Лесозаготовительная машина по п. 1 или 2, отличающаяся тем, что лесозаготовительная машина (120; 220) содержит датчик (132), выполненный с возможностью определения текущего состояния, и при этом текущее состояние включает текущий угол вала ротора и/или входную мощность и/или выходную мощность по меньшей мере одного из электродвигателей (106a, 106b).
4. Лесозаготовительная машина по любому из предшествующих пунктов, отличающаяся тем, что блок (130; 230) управления кроме того выполнен с возможностью передачи данных, относящихся к текущему состоянию, в блок контроля для диагностики и/или выявления неисправностей.
5. Лесозаготовительная машина по любому из предшествующих пунктов, отличающаяся тем, что приводной механизм выполнен с возможностью регулировки текущего давления пилы (104) на основании выходной мощности текущего состояния.
6. Лесозаготовительная машина по любому из предшествующих пунктов, отличающаяся тем, что приводной механизм содержит по меньшей мере одно из: гидравлического цилиндра, гидравлического двигателя или электродвигателя.
7. Система (240) контроля лесозаготовки, содержащая блок (234) контроля для диагностики и/или выявления неисправностей и лесозаготовительную машину (220), при этом блок (234) контроля и лесозаготовительная машина (220) связаны с обменом данных, отличающаяся тем, что лесозаготовительная машина (220) является лесозаготовительной машиной (220) по любому из предшествующих пунктов, причем блок (234) контроля выполнен с возможностью получения данных, относящихся к текущему состоянию по меньшей мере одного из электродвигателей, и тем, что блок (234) контроля выполнен с возможностью проведения диагностики и/или выявления неисправностей на основании полученных данных.
8. Система (240) контроля лесозаготовки по п. 7, отличающаяся тем, что лесозаготовительная машина (220) содержит блок (232) управления, выполненный с возможностью управления по меньшей мере одним из электродвигателей и/или приводным механизмом лесозаготовительной машины (220) на основании текущего состояния, тем, что блок (230) управления кроме того выполнен с возможностью получения сигналов управления от блока (234) контроля, и тем, что выявление неисправностей на основании полученных данных предусматривает передачу сигнала управления, предназначенного для регулировки механической выходной мощности по меньшей мере одного электродвигателя и/или приводного механизма лесозаготовительной машины, в блок (230) управления лесозаготовительной машины (220).
9. Система (240) контроля лесозаготовки по п. 7 или 8, отличающаяся тем, что блок (234) контроля и лесозаготовительная машина (220) являются отдельными устройствами, и тем, что они связаны беспроводной связью.
10. Харвестерная головка (100; 200; 300) для лесозаготовительной машины (120; 220), имеющей стрелу (118) крана, при этом харвестерная головка (100; 200; 300) содержит пилу (104; 304) и по меньшей мере два подающих колеса (102; 302), отличающаяся тем, что харвестерная головка (100; 200; 300) дополнительно содержит электродвигатель (106a; 306a), выполненный с возможностью приведения в действие пилы (104; 304), и по меньшей мере один электродвигатель (106b; 306b), выполненный с возможностью приведения в действие подающих колес (102; 302),
при этом харвестерная головка (100; 200; 300) содержит датчик (308) угла, выполненный с возможностью определения угла вала ротора соответствующего электродвигателя.
11. Харвестерная головка (100; 200; 300) по п. 10, отличающаяся тем, что каждое из упомянутых по меньшей мере двух подающих колес (102; 302) имеет выделенный электродвигатель (106b; 306b), выполненный с возможностью приведения в действие соответствующего подающего колеса (102; 302).
12. Харвестерная головка (100; 200; 300) по п. 10, отличающаяся тем, что датчик (308) угла содержится в соответствующем электродвигателе.
13. Харвестерная головка (100; 200; 300) по любому из пп. 10-12, отличающаяся тем, что содержит зубчатую передачу (110; 310), расположенную между каждым подающим колесом (102; 302) и соответствующим электродвигателем (106b; 306b), выполненным с возможностью приведения в действие подающих колес (102; 302), причем зубчатая передача (110; 310) выполнена с возможностью обеспечения коэффициента выходной мощности с заданным крутящим моментом, где выходной мощностью является выходная мощность соответствующего электродвигателя (106b), выполненного с возможностью приведения в действие подающих колес (102; 302).
14. Харвестерная головка (100; 200; 300) по любому из пп. 10-13, отличающаяся тем, что харвестерная головка (100; 200; 300) содержит гидравлическое устройство (116) сопряжения, выполненное с возможностью подачи гидравлической жидкости из лесозаготовительной машины, причем гидравлическая жидкость охлаждает по меньшей мере один из электродвигателей (106a, 106b; 306a, 306b) и/или по меньшей мере один инвертирующий усилитель (112; 312) мощности харвестерной головки (100; 200; 300).
15. Харвестерная головка (100; 200; 300) по любому из пп. 10-14, отличающаяся тем, что содержит проскальзывающую муфту (314), расположенную между пилой (104; 304) и электродвигателем (106a; 306a), выполненным с возможностью приведения в действие пилы (104; 304), при этом проскальзывающая муфта (314) предназначена для ограничения величины механической мощности, прикладываемой к пиле (104; 304), таким образом, чтобы прикладываемая механическая мощность оставалась ниже заданного предела безопасности.
16. Харвестерная головка (100; 200; 300) по любому из пп.10-15, отличающаяся тем, что ротор электродвигателя (106a; 306a), выполненного с возможностью приведения в действие пилы (104; 304), имеет момент инерции, выбранный для предотвращения повреждения пильной цепи пилы (104; 304) из-за напряжения, связанного с передачей кинетической энергии на пильную цепь во время резкой остановки электродвигателя (106a; 306a), выполненного с возможностью приведения в действие пилы (104; 304).
17. Харвестерная головка (100; 200; 300) по любому из пп.10-16, отличающаяся тем, что харвестерная головка (100; 200; 300) дополнительно содержит блок (130; 230) управления, выполненный с возможностью управления по меньшей мере одним из электродвигателей (106a, 106b) и/или приводным механизмом (100; 200; 300) харвестерной головки на основании полученного текущего состояния, относящегося по меньшей мере к одному из электродвигателей (106a, 106b).
18. Способ (400) управления работой харвестерной головки, содержащей пилу, управляемую первым электродвигателем, и по меньшей мере два подающих колеса, управляемых по меньшей мере одним вторым электродвигателем, причем способ (400) предусматривает:
- определение (S41) текущего состояния, относящегося по меньшей мере к одному первому и по меньшей мере одному второму электродвигателю; и
- управление (S42) упомянутым по меньшей мере одним первым и упомянутым по меньшей мере одним вторым электродвигателем и/или приводным механизмом харвестерной головки (100; 200; 300) на основании текущего состояния.
19. Способ (500) контроля работы лесозаготовительной машины, при этом лесозаготовительная машина содержит харвестерную головку, содержащую пилу, управляемую первым электродвигателем, и по меньшей мере два подающих колеса, управляемых по меньшей мере одним вторым электродвигателем, причем способ (500) предусматривает:
- получение (S51) данных, относящихся к текущему состоянию по меньшей мере одного из электродвигателей; и
- проведение (S52) диагностики и/или выявление неисправностей на основании полученных данных.
| US 5727610 A, 17.03.993 | |||
| WO 00/65900 A1, 09.11.2000 | |||
| DE 102010015231 A1, 30.08.2012 | |||
| Способ и приспособление для нагревания хлебопекарных камер | 1923 |
|
SU2003A1 |
| Устройство для измерения температуры газов или жидкостей | 1927 |
|
SU8641A1 |

