Изобретение относится к лесной промышленности и может быть использовано при массовой заготовке леса валочно-трелевочными машинами (ВТМ) и валочно-трелевочно-процессорными машинами (ВТПМ).
Известен способ направленной валки деревьев и устройство для осуществления способа [1], при котором в завершение спиливания при начале падения дереву придают вращательное движение вокруг его продольной оси за счет действия силы резания и силы трения в конце спиливания с возможностью укладки спиленного дерева на грунт под углом от 10 до 30 градусов по отношению к продольной оси валочной машины.
Недостатками известного способа являются сложность обеспечения точного направления валки таким образом, чтобы вершина оказалась в центре волока, что обусловлено человеческим фактором, т.к. угол валки дерева устанавливает оператор машины исходя из визуальной оценки его высоты, кроме того, закручивание дерева в конце спиливания вокруг его продольной оси вызовет большую погрешность в требуемом угле валки, который находится в узких пределах от 10 до 30 градусов относительно продольной оси машины.
В известном способе валка дерева осуществляется гибкими пильными цепями способом, при котором причиной падения дерева является выход проекции центра тяжести его за контур пня вследствие наклона ствола при изгибе недопила, процесс падения дерева начинается в момент разрушения недопила. При данном способе не применяются никакие валочные приспособления (например, манипуляторы и др.), что не позволяет обеспечить контроль точности направления валки дерева.
Известен способ направленной валки деревьев [2], содержащий одностороннее срезание деревьев режущим органом при непрерывном поступательном движении валочной машины, перемещение и подъем комля срезанного дерева под действием удара, при котором удар осуществляется режущим органом, поворотным относительно оси, расположенной поперек направленного движения валочной машины.
Недостатками этого способа являются его сложность, невысокая производительность.
Наиболее известен и широко распространен способ направленной валки деревьев, применяемый при работе ВТМ манипуляторного типа на валке-трелевке деревьев. ВТМ манипуляторного типа состоит из следующих основных узлов: рамы, ходовой системы, кабины, двигателя, гидроманипулятора с установленным на нем захватно-срезающим устройством (ЗСУ) и зажимного коника. ЗСУ состоит из рамы, упора, гидродвигателя, зажимных крюков, пильного аппарата и для повала деревьев в заданном направлении имеет возможность поворачиваться в вертикальной плоскости на угол 120°, в горизонтальной плоскости на 300° с использованием гидроцилиндров наклона и поворота.
Технологический цикл работы ВТМ на лесосеке включает наводку манипулятора на дерево, захват дерева, спиливание его с использованием ЗСУ, погрузку деревьев в коник, открытие и закрытие коника, переезд ВТМ с одной стоянки до другой. Затем производится трелевка пачки деревьев до погрузочной площадки, где производится разгрузка пачки и штабелевка деревьев [3, 4].
Недостатком известного способа является то, что при управлении оператором установка ЗСУ под углом к оси манипулятора, обеспечивающим достаточно точный повал деревьев в соответствии с предъявляемыми требованиями, затруднена. Это связано с тем, что для решения указанной задачи оператор должен за короткое время переработать большое количество информации, которое он воспринимает визуально, зачастую со значительными ошибками. При известном способе валки для определения угла поворота ЗСУ, если коник и манипулятор расположены на одной площадке, ему необходимо на прямолинейных участках, когда ось пачки и платформы машины совпадают, определить: координаты дерева относительно колонны манипулятора, угол поворота манипулятора, вылет манипулятора, высоту деревьев, кроме того, на поворотах угол между осью платформы и осью трелюемой пачки деревьев. В настоящее время на многих моделях ВТМ, а в перспективе и на ВТПМ манипуляторы с ЗСУ устанавливаются на одной платформе (передней), а коник на другой (задней); в этом случае необходимо визуально определить и угол поворота передней секции относительно задней. Все это снижает точность валки деревьев и как следствие производительность работ.
Если дерево валится с отклонением от заданного направления, то на его укладку в коник затрачивается дополнительное время [5]. Кроме того, при перекрещивании комлей деревьев в конике коэффициент полнодревесности пачки деревьев, уложенных в коник ВТМ или ВПТМ, уменьшается с 0,6-0,7 до 0,4-0,5, соответственно уменьшается и объем трелюемой пачки деревьев [5].
Проведенными исследованиями и практикой лесозаготовок доказано, что у 20-25% поваленных деревьев вершины выходят за пределы волока, в результате снижается производительность машин, а также при трелевке повреждаются оставленные деревья и подрост.
Известен способ заготовки древесины с использованием валочно-процессорно-трелевочной машины (ВПТМ). ВПТМ состоит из тех же составных узлов, что и ВТМ, но вместо ЗСУ на манипуляторе установлена харвестерная головка, которая также как и описанное выше ЗСУ способна поворачиваться в горизонтальной и вертикальной плоскостях, обеспечивая направленный повал деревьев. На лесосеке ВТПМ выполняет те же функции, что и ВТМ, а на погрузочной площадке, кроме того, обрезку сучьев и раскряжевку деревьев [6, 7]. При известном способе валка деревьев осуществляется аналогично как и при использовании ВТМ.
Известный способ валки деревьев обладает теми же недостатками, что и известный способ с использованием ВТМ.
Технический результат предлагаемого способа направленной валки деревьев заключается в обеспечении высокой точности направления валки деревьев, исключении «человеческого» фактора при выборе направления валки, облегчении труда оператора лесозаготовительной машины, упрощении и ускорении процесса набора пачки поваленных деревьев в расположенный на платформе лесозаготовительной машины коник, повышении производительность процесса заготовки древесины.
Достигается технический результат тем, что непосредственно перед захватом дерева с помощью системы датчиков и бортового компьютера определяются координаты дерева относительно центра колонны манипулятора и продольной геометрической оси задней секции лесозаготовительной машины, диаметр ствола дерева у основания, угол поворота оси пачки деревьев, относительно продольной геометрической оси задней секции лесозаготовительной машины, затем с использованием полученных данных по программе, заложенной в бортовой компьютер, определяются высота дерева, требуемый угол поворота захватно-срезающего устройства, необходимый для повала дерева таким образом, чтобы его вершина оказалась на волоке, осуществляется поворот захватно-срезающего устройства на требуемый угол и затем производится захват дерева, повернутым на требуемый угол захватно-срезающим устройством.
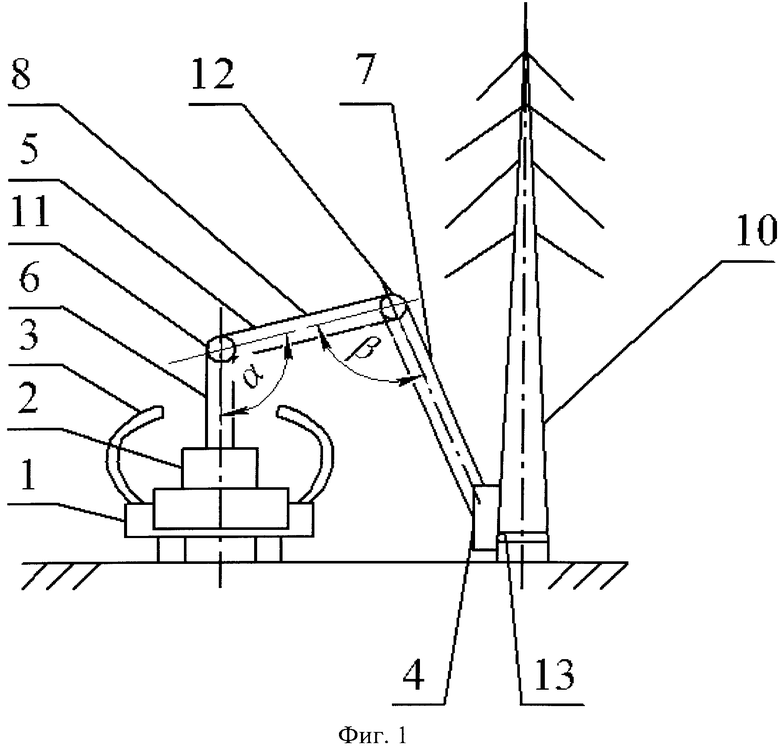
На фиг.1 показана схема наводки манипулятора лесозаготовительной машины на дерево. На фиг.2 показана схема направленной валки дерева вершиной на волок (вид сверху) в противоположную движению машины сторону с последующей укладкой дерева комлевой частью в коник лесозаготовительной машины.
Способ направленной валки деревьев осуществляется следующим образом. Лесозаготовительная машина 1, снабженная кабиной 2, грузовой платформой с раздвижным коником 3, захватно-срезающим устройством 4, установленным на манипуляторе 5, включающем колонну 6, стрелу 8 и рукоять 7 движется вдоль волока 9. Останавливается у дерева 10, подлежащего валке. Оператор лесозаготовительной машины 1 наводит захватно-срезающее устройство 4 на дерево 10, подлежащее валке, захватывает его ствол и с использованием системы датчиков определяет координаты дерева 10 относительно центра колонны 6 манипулятора 5 и продольной геометрической оси задней секции 15 лесозаготовительной машины 1 и диаметр ствола дерева 10 у основания.
В систему датчиков входят: датчик 11 определения угла α поворота стрелы 8 манипулятора 5 относительно его колонны 6; датчик 12 определения угла β поворота стрелы 8 относительно рукояти 7 манипулятора 5; датчик 13 измерения диаметра ствола дерева 10, подлежащего валке; датчик 14 измерения угла γ поворота раздвижного коника 3 относительно продольной геометрической оси задней секции 15 лесозаготовительной машины 1, равного углу δ между продольной геометрической осью задней секции 15 и геометрической осью пачки деревьев 16, трелюемой лесозаготовительной машиной 1; датчик 17 угла θ поворота манипулятора 5 относительно оси передней секции 18 лесозаготовительной машины 1; датчика 19 измерения угла φ поворота передней секции 18 лесозаготовительной машины 1 относительно ее задней секции 15.
По полученным с датчиков 11, 12, 13, 14, 17, 19 данным бортовым компьютером, установленным в кабине 2 лесозаготовительной машины 1, определяется высота дерева 10 и задается угол ψ поворота захватно-срезающего устройства 4 таким образом, чтобы валка дерева 10 осуществлялась вершинной частью в направлении, противоположном движению лесозаготовительной машины 1, причем его вершина оказывалась на волоке 9. Затем осуществляются поворот захватно-срезающего устройства 4 на угол ψ и срезание ствола дерева 10. Затем комель поваленного дерева 10 помещается в предварительно открытый раздвижной коник 3 лесозаготовительной машины 1, формируя тем самым пачку деревьев 16. Раздвижной коник 3 закрывается. Лесозаготовительная машина 1 переезжается к следующему месту валки. После формирования пачка деревьев 16 трелюется к погрузочной площадке.
При предлагаемом способе направленной валки деревьев наводка ЗСУ или харвестерной головки заключается в корректировке вылета и угла поворота манипулятора (поворот в горизонтальной плоскости, подъем или опускание стрелы, выдвижение или подтягивание рукояти), а также поворота ЗСУ или харвестерной головки. Основным условием обеспечения требуемого направления валки дерева является его правильный зажим. Для этого ЗСУ или харвестерную головку следует повернуть так, чтобы дерево при валке попадало вершинной частью на волок или в вершины деревьев, собранных в пачку, трелюемую лесозаготовительной машиной. Это достигается совмещением продольной оси ЗСУ или харвестерной головки с направлением валки.
Наблюдения показали, что наводка рукояти манипулятора и доставка ЗСУ или харвестерной головки к дереву производятся достаточно точно как при управлении технологическим оборудованием с использованием ручных распределителей, так и с использованием электрогидравлических и гидрогидравлических распределителей. При этом во втором случае ускоряется процесс наводки и улучшаются эргономические показатели работы оператора.
Для автоматизации поворота ЗСУ или харвестерной головки с достаточной точностью на угол, обеспечивающий повал деревьев вершиной на волок, предусмотрена установка датчиков, с помощью которых определяются основные параметры работы технологического оборудования, а также выведены зависимости для определения промежуточных показателей. На манипуляторе установлены датчики, фиксирующие взаимное положение оси колонны манипулятора и оси стрелы манипулятора, оси стрелы манипулятора и оси рукояти манипулятора, а также датчик, фиксирующий угол поворота оси колонны манипулятора относительно продольной геометрической оси задней секции лесозаготовительной машины. На платформе лесозаготовительной машины устанавливается датчик угла поворота коника. Этот угол равен углу, на который смещается ось пачки деревьев относительно продольной геометрической оси задней секции грузовой платформы машины.
Если манипулятор и коник установлены на разных платформах, то в точке сочленения обеих платформ устанавливается датчик, фиксирующий угол поворота передней секции относительно задней.
Диаметр дерева фиксируется бесконтактным датчиком. Длина дерева для различных разрядов высот связана с его диаметром достаточно тесными зависимостями. Имеются таблицы, которыми пользуются лесозаготовители при оценке качественных показателей и оценке запасов леса в лесосеках, на основе которых выведены необходимые корреляционные зависимости.
В бортовых компьютерах лесозаготовительных машин, например харвестеров, имеются программы, с использованием которых по замеренному диаметру дерева определяются его высота и оптимальная схема раскроя на сортименты [8].
При установке на ВТМ бортовых компьютеров легко определяется длина дерева; на ВТПМ на лесосеке при захвате дерева определяется его длина, а на погрузочной площадке для каждого дерева - оптимальная схема раскряжевки.
Бортовым компьютером по заданной программе с использованием данных, полученных с датчиков, определяются вылет манипулятора, угол поворота его относительно продольной геометрической оси задней секции лесозаготовительной машины (координаты дерева), угол поворота оси пачки деревьев относительно продольной геометрической оси задней секции лесозаготовительной машины, угол поворота передней оси машины относительно задней, диаметр и высота дерева. С использованием этих данных определяется угол поворота ЗСУ или харвестерной головки, обеспечивающий валку дерева вершиной на волок в направлении, противоположном движению лесозаготовительной машины, затем по команде бортового компьютера производится поворот ЗСУ или харвестерной головки на соответствующий угол, захват, спиливание и повал дерева в заданном направлении.
При необходимости повала крупных деревьев после определения диаметра, высоты и направления валки с противоположной стороны предварительно производится подпил, параллельный основному срезу дерева.
БИБЛИОГРАФИЯ
1. Пат. №2466530, Российская Федерация, МПК7 A01G 23/08. Способ направленной валки деревьев и устройство для осуществления способа / Козинов Г.Л., Елистратов Ю.П., Старостин Г.И.; заявитель и патентообладатель: СибГТУ. - №2010107836/13; заявл. 03.03.2010; опубл. 20.11.2012. Бюл. №32.
2. Пат. №1219002, СССР, МПК7 A01G 23/08. Способ направленной валки деревьев / Стефанов О. А., Захаров В. В.; заявитель и патентообладатель: Центральный научно-исследовательский и проектно-конструкторский институт механизации и энергетики лесной промышленности. - №3591239/29-15; заявл. 12.05.1983; опубл. 23.03.1986. Бюл. №11.
3. Валочно-трелевочная машина ЛП-17 / Ю.М.Федоров, Д.М.Алексеев, В.Ф.Кушляев, Е.А.Колобов, В.В.Акимов, Н.П.Яскунов, В.В.Федоров. - М.: Лесн. пром-сть, 1984. - 240 с.
4. Люманов Р. Машинная валка леса. - М.: Лесн. пром-сть, 1990. - 280 с.
5. Оптимизация процесса валки и трелевки деревьев агрегатной машиной / И.Р.Шегельман, В.И.Скрыпник, А.В.Кузнецов // Перспективы науки. Вып. №3 (30). Тамбов, 2012. - С.88-91.
6. Пат. на ПМ №94111, Российская Федерация, МПК7 A01G 23/02. Валочно-трелевочно-процессорная машина / Шегельман И.Р., Скрыпник В.И.; заявитель и патентообладатель Петрозаводский государственный университет. - №2009144754/22; заявл. 02.12.2009; опубл. 20.05.2010. Бюл. №14.
7. Пат. №2426303, Российская Федерация, МПК7 A01G 23/00. Способ выполнения лесосечных работ агрегатной машиной / Шегельман И.Р., Будник П.В., Скрыпник В.И., Баклагин В.Н.; заявитель и патентообладатель Петрозаводский государственный университет. - №2009109914/21; заявл. 18.03.2009; опубл. 20.08.2011. Бюл. №23.
8. Шегельман И.Р. Машины и технология заготовки сортиментов на лесосеке: монография / И.Р.Шегельман, В.И.Скрыпник, О.Н.Галактионов. - Петрозаводск: Изд-во ПетрГУ, 2011. - 108 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЗАХВАТНО-СРЕЗАЮЩЕЕ УСТРОЙСТВО ЛЕСОЗАГОТОВИТЕЛЬНОЙ МАШИНЫ | 2013 |
|
RU2529159C1 |
| ЛЕСОЗАГОТОВИТЕЛЬНАЯ МАШИНА | 1996 |
|
RU2116025C1 |
| ВАЛОЧНО-ТРЕЛЕВОЧНАЯ МАШИНА | 1995 |
|
RU2105466C1 |
| СПОСОБ РАСКРЯЖЕВКИ УЛОЖЕННЫХ В ШТАБЕЛЬ ДЕРЕВЬЕВ | 2014 |
|
RU2599563C2 |
| ЛЕСОЗАГОТОВИТЕЛЬНАЯ МАШИНА | 1967 |
|
SU214231A1 |
| СПОСОБ МАШИННОЙ ЗАГОТОВКИ ДРЕВЕСИНЫ НА ЛЕСОСЕКЕ | 2001 |
|
RU2208309C1 |
| Лесозаготовительная машина | 1982 |
|
SU1128872A1 |
| Лесозаготовительная машина | 1980 |
|
SU935004A1 |
| СПОСОБ ОБРАБОТКИ ДЕРЕВЬЕВ, СКЛАДИРОВАННЫХ В ШТАБЕЛЕ | 2023 |
|
RU2819280C1 |
| Подвеска захватно-срезающего устройства лесозаготовительной машины | 1981 |
|
SU1186155A1 |

Изобретение относится к лесной промышленности и может быть использовано при массовой заготовке древесины. Способ направленной валки деревьев с использованием лесозаготовительной машины, имеющей кабину с установленным внутри бортовым компьютером со специальным программным обеспечением, грузовую платформу с коником, захватно-срезающее устройство, установленное на манипуляторе, состоящем из колонны, стрелы и рукояти, включает переезд лесозаготовительной машины к месту валки, ее остановку, наводку манипулятора с установленным на его рукояти захватно-срезающим устройством на дерево, захват ствола дерева, срезание ствола дерева, валку дерева вершиной на волок в противоположную движению машины сторону, укладку дерева комлевой частью в коник лесозаготовительной машины. Непосредственно перед захватом дерева с помощью системы датчиков и бортового компьютера определяют координаты дерева относительно центра колонны манипулятора и продольной геометрической оси задней секции лесозаготовительной машины, диаметр ствола дерева у основания, угол поворота оси пачки деревьев относительно продольной геометрической оси задней секции лесозаготовительной машины. Затем с использованием полученных данных по программе, заложенной в бортовой компьютер, определяют высоту дерева, требуемый угол поворота захватно-срезающего устройства, необходимый для повала дерева таким образом, чтобы его вершина оказалась на волоке, осуществляют поворот захватно-срезающего устройства на требуемый угол и затем производят захват дерева повернутым на требуемый угол захватно-срезающим устройством. Способ обеспечивает точность направленной валки, упрощение и ускорение процесса набора пачки поваленных деревьев в расположенный на платформе лесозаготовительной машины коник, повышение производительности процесса заготовки древесины. 2 ил.
Способ направленной валки деревьев с использованием лесозаготовительной машины, имеющей кабину с установленным внутри бортовым компьютером со специальным программным обеспечением, грузовую платформу с коником, захватно-срезающее устройство, установленное на манипуляторе, состоящем из колонны, стрелы и рукояти, включающий переезд лесозаготовительной машины к месту валки, ее остановку, наводку манипулятора с установленным на его рукояти захватно-срезающим устройством на дерево, захват ствола дерева, срезание ствола дерева, валку дерева вершиной на волок в противоположную движению машины сторону, укладку дерева комлевой частью в коник лесозаготовительной машины, отличающийся тем, что непосредственно перед захватом дерева с помощью системы датчиков и бортового компьютера определяются координаты дерева относительно центра колонны манипулятора и продольной геометрической оси задней секции лесозаготовительной машины, диаметр ствола дерева у основания, угол поворота оси пачки деревьев, относительно продольной геометрической оси задней секции лесозаготовительной машины, затем с использованием полученных данных по программе, заложенной в бортовой компьютер, определяются высота дерева, требуемый угол поворота захватно-срезающего устройства, необходимый для повала дерева таким образом, чтобы его вершина оказалась на волоке, осуществляется поворот захватно-срезающего устройства на требуемый угол и затем производится захват дерева повернутым на требуемый угол захватно-срезающим устройством.
| Способ валки деревьев лесозаготовительной машиной | 1982 |
|
SU1058542A1 |
| Способ валки деревьев и укладки их на коник лесозаготовительной машины | 1978 |
|
SU948343A1 |
| СПОСОБ ПОВАЛА ДЕРЕВЬЕВ И УКЛАДКИ ИХ НА КОНИК ЛЕСОЗАГОТОВИТЕЛЬНОЙ МАШИНЫ | 0 |
|
SU182432A1 |
| US 4540032 A, 10.09.1985 | |||

