Изобретение относится к способам диагностики состояния заглубляемых трубопроводов, предназначенных для транспортировки газообразных и жидких веществ, например, природного газа или нефти, а именно к подготовительным, калибровочным операциям при настройке и подготовке систем диагностики к работе.
Известен способ мониторинга напряженно-деформированного состояния выделенных участков магистрального трубопровода по которому: на основе предварительного обследования выявляют наиболее опасные участки заглубленного магистрального трубопровода в которых могут произойти внешние негативные воздействия (сейсмические воздействия, движения тектонических блоков, карсты, оползни, курумы, морозное пучение, всплывание трубопровода в результате затопления местности где трубопровод походит и т.д.) приводящие к деформациям магистрального трубопровода; помещают на трубопроводе в местах опасных участков заглубленного магистрального трубопровода датчики контроля давления, которые присоединяются к информационной сети, при превышении на датчиках уровня внешнего воздействия выше порогового значения информационная система формирует сигнал опасности, который выводится на экран автоматизированного рабочего места диспетчера, который, в свою очередь, организует меры и мероприятия предотвращения негативной деформации магистрального трубопровода [Способ мониторинга и оценки технического состояния магистрального трубопровода и система для его реализации, патент RU 2 451 874 С1 или Способ мониторинга технического состояния трубопровода и система для его осуществления, патент RU2 563 419 С2]. Калибровочные операции по данному способу связаны с проверкой исправности датчиков контроля давления, и их настройкой при присоединении к информационной сети.
Недостатком указанного способа является то, что отсутствуют настроечные или калибровочные операции для всей системы в целом, а анализ внешнего механического воздействия на трубопровод носит точечный характер. Это существенно ограничивает выявление причин возникновения напряженно-деформированного состояния выделенных для контроля участков магистрального трубопровода.
Известен по способ настройки системы контроля напряженно-деформированного состояния заглубленного трубопровода [А.Л. Ермилов, А.В. Гречанов, С.А. Щекочихин Мониторинг деформации трубопровода и подвижек грунта на объекте магистральный с газопровод «Сахалин-Хабаровск-Владивосток» // Фотон-экспресс, №5 (125), сентябрь, 2015, стр. 14-17 или С.В. Смирнов, Х.В. Иванов Волоконно-оптические технологии для создания безопасных условий эксплуатации трубопроводных систем в труднодоступных и сложных природно-климатических регионах // Безопасность Труда в Промышленности, 2017, №2, стр. 33-39, www.safety.ru].
Способ заключается в том, что собирают на поверхности заглубляемый трубопровод путем соединения между собой отрезков труб с радиусом R параллельно оси трубопровода при помощи сварки, на контролируемом участке трубопровода, к внешней поверхности трубопровода, к его изоляции прикрепляют N=3 распределенных волоконно-оптических сенсора продольной деформации, при этом в каждом i-м поперечном сечении трубопровода каждый j-й сенсор крепится в точке соответствующей величине xi погонной длины оси трубопровода с угловыми координатами γij с первоначальным натяжением εij СЕНС НАЧ, каждый j-й сенсор подключают к измерительной аппаратуре системы контроля напряженно-деформированного состояния трубопровода, способной выполнять измерения значений продольной деформации εij СЕНС для каждого j-го сенсора в каждом i-м поперечном сечении трубопровода, соответствующей величине xi погонной длины оси трубопровода, выполняют калибровочную настройку системы, на основе того, что в каждом i-м поперечном сечении трубопровода соответствующим величине xi погонной длины оси трубопровода и точке крепления j-го сенсора к трубопроводу калибровочное значение продольной деформации трубопровода εij ФИКС КАЛ равно нулю и измеренное при калибровке измерительной аппаратурой системы контроля напряженно-деформированного состояния трубопровода значение продольной деформации εij СЕНС КАЛ этого j-го распределенного волоконно-оптического сенсора для значения величины погонной длины xi равно величине первоначального натяжения εij СЕНС НАЧ, после чего трубопровод помещают в грунт и осуществляют непрерывный анализ напряженно-деформированного состояния трубопровода путем непрерывного сравнения текущих зафиксированных значений продольной деформации трубопровода εij ФИКС, определяемых как:
εij ФИКС = εij СЕНС - εij СЕНС НАЧ.
где εij ФИКС - значение, зафиксированное j-м сенсором системы контроля напряженно-деформированного состояния трубопровода в i-м поперечном сечении трубопровода;
εij СЕНС - значение продольной деформации, измеренные в j-м сенсором в i-м поперечном сечении трубопровода;
εij СЕНС НАЧ - первоначальное натяжение j-го сенсора в i-м поперечном сечении трубопровода
с соответствующими значениями продольной деформации трубопровода при первоначальном и предыдущих измерениях, и с заданными пороговыми значениями продольной деформации трубопровода, по результатам сравнения выявляют участки напряженно-деформированного состояния трубопровода с повышенной деформацией, а информация о погонной координате xi ПОВ ДЕФ, угловой координате γij ПОВ ДЕВ и параметрах продольной деформации трубопровода на участке с повышенной деформацией выводят на экран автоматизированного рабочего места диспетчера.
Способ настройки системы контроля напряженно-деформированного состояния заглубленного трубопровода учитывает то, что сборка происходит путем присоединения новой секции к уже собранному участку трубопровода. При этом методика сборки трубопровода подразумевает соосное присоединение новой секции к уже собранному участку трубопровода, которые затем свариваются. Считается, что такая процедура сборки трубопровода позволяет избежать напряжений, вызывающих продольные деформации трубопровода. Эти напряжения будут возникать потом после перемещения трубопровода в траншею и засыпки трубопровода грунтом при воздействиях на трубопровод внешних факторов, таких как пучение, всплытие при затоплении грунтовыми и вешними водами, смещениях грунта в результате оползней и т.д.
Поэтому трубопровод при установке на него распределенных волоконно-оптических сенсоров продольной деформации считают не напряженным и, соответственно, не деформированным. В распределенных волоконно-оптических сенсорах продольной деформации создают первоначальное натяжение для того, чтобы у заглубленного в грунт трубопровода можно было фиксировать деформации, как растяжения, так и сжатия.
Способ настройки системы контроля напряженно-деформированного состояния заглубленного трубопровода выбран в качестве прототипа.
Недостатком прототипа является то, что не учитывается тот факт, что распределенные волоконно-оптические сенсоры продольной деформации прикрепляются к изоляции трубопровода уже в собранном состоянии. К этому моменту в нем действительно нет продольных деформаций, связанных с продольным напряжением, вызванным растяжением или сжатием всего трубопровода вдоль оси, так как именно для этого предусмотрена методика сборки трубопровода, при которой производится соосное присоединение и сварка новой секции к уже собранному участку трубопровода.
Однако в собранном состоянии трубопровод находится, как правило, на земной поверхности рядом с траншеей, в которую он будет перемещен перед засыпкой грунтом. В результате трубопровод принимает изгибные деформации поверхности земли. Указанные деформации вызывают напряжения в теле трубопровода, величина которых определяется величиной радиуса изгиба трубопровода.
Таким образом, предположение, что на момент калибровки в материале трубопровода отсутствуют напряжения не верно. Игнорирование этих напряжений, связанных с изгибными деформациями, будет приводить к систематическим ошибкам при мониторинге напряженно-деформированного состояния трубопровода из-за неправильной начальной калибровки.
Кроме того, как и для любой информационной системы контроля распределенного объекта, в системе должна быть информационная модель расположения трубопровода в пространстве. Для таких моделей характерен рост систематической ошибки, вызванной несовпадением реального пространственного положения точки на поверхности волоконно-оптического сенсора продольной деформации и значением координаты этой точки в системе контроля напряженно-деформированного состояния заглубленного трубопровода.
Целью заявленного способа калибровки системы контроля напряженно-деформированного состояния заглубляемого трубопровода является исключение систематических ошибок в измерениях параметров напряженно-деформированного состояния заглубляемого трубопровода, при котором учитываются изгибные деформации поверхности земли, появляющиеся при размещении заглубляемого трубопровода на поверхности земли в процессе его сборки, и реальное пространственное положение точки на поверхности волоконно-оптического сенсора продольной деформации.
Техническим результатом является увеличение точности калибровочных операций при настройке систем мониторинга состояния заглубленного трубопровода путем устранения систематических погрешностей при помощи калибровки системы контроля напряженно-деформированного состояния заглубляемого трубопровода использующей волоконно-оптические сенсоры продольной деформации.
Технический результат достигается тем, что собирают на поверхности заглубляемый трубопровод путем соединения между собой отрезков труб с радиусом R параллельно оси трубопровода при помощи сварки, на контролируемом участке трубопровода, к внешней поверхности трубопровода, к его изоляции прикрепляют N распределенных волоконно-оптических сенсора продольной деформации, при этом в каждом i-м поперечном сечении трубопровода каждый j-й сенсор крепится в точке соответствующей величине xi погонной длины оси трубопровода с угловыми координатами γij с первоначальным натяжением εij СЕНС НАЧ, каждый j-й сенсор подключают к измерительной аппаратуре системы контроля напряженно-деформированного состояния трубопровода, способной выполнять измерения значений продольной деформации εij СЕНС для каждого j-го сенсора в каждом i-м поперечном сечении трубопровода, соответствующей величине xi погонной длины оси трубопровода, выполняют калибровочную настройку системы, при которой в каждом i-м поперечном сечении трубопровода соответствующим величине xi погонной длины оси трубопровода и точке крепления j-го сенсора к трубопроводу с учетом величины первоначального натяжения ставят в соответствие известное калибровочное значение продольной деформации трубопровода с зафиксированным измерительной аппаратурой системы контроля напряженно-деформированного состояния трубопровода значением продольной деформации этого j-го распределенного волоконно-оптического сенсора для значения величины погонной длины xi, после чего трубопровод помещают в грунт и осуществляют непрерывный анализ напряженно-деформированного состояния трубопровода путем непрерывного сравнения текущих зафиксированных значений продольной деформации трубопровода εij ФИКС с соответствующими значениями продольной деформации трубопровода при первоначальном и предыдущих измерениях, и с заданными пороговыми значениями продольной деформации трубопровода, по результатам сравнения выявляют участки напряженно-деформированного состояния трубопровода с повышенной деформацией, а информация о погонной координате xi ПОВ ДЕФ, угловой координате γij ПОВ ДЕФ и параметрах продольной деформации трубопровода на участке с повышенной деформацией выводят на экран автоматизированного рабочего места диспетчера, при этом при калибровке при помощи системы контроля напряженно-деформированного состояния трубопровода выполняют измерения значений продольной деформации εij СЕНС КАЛ и убеждаются, что зафиксированная величина при калибровке близка к заданной величине первоначального натяжения εij СЕНС КАЛ ≈ εij СЕНС НАЧ, при калибровочной настройке системы до заглубления трубопровода отмечают контрольные точки на поверхности трубопровода на поверхности распределенных волоконно-оптических сенсоров продольной деформации, для каждого j-го сенсора при включенной системе осуществляют локальное упругое механическое воздействие на сенсор в выбранных контрольных точках, фиксируют наличие реакции на это воздействие в системе и осуществляют привязку каждой контрольной точки к текущей величине xi погонной длины оси трубопровода с угловыми координатами γij в системе контроля напряженно-деформированного состояния трубопровода, с помощью измерительного оборудования на контролируемом участке трубопровода определяют положение в пространстве точек на поверхности трубопровода на поверхности распределенных волоконно-оптических сенсоров продольной деформации, включая контрольные точки, на основе выполненных измерений создают информационную геометрическую модель трубопровода, в которой определяют положение в пространстве оси трубопровода на основе решения геометрической задачи определения координаты точки на оси цилиндра по координатам нескольких точек на его поверхности, при этом для каждого i-го поперечного сечения трубопровода соответствующего величине xi погонной длины оси трубопровода и каждого j-го сенсора определяют угловую координату γij точки его крепления к трубопроводу, после этого для каждого i-го поперечного сечения трубопровода вычисляют калибровочные значения радиуса ρi КАЛ изгиба трубопровода и калибровочные значения угла γ0i КАЛ - перпендикулярного плоскости изгиба трубопровода в результате изгибной деформации, с помощью которых вычисляют калибровочные зависимости значений продольной деформации трубопровода εij КАЛ в точках крепления сенсоров к трубопроводу от угловых координат γij как:
εij КАЛ = R sin(γ0i КАЛ - γij)/ρi КАЛ,
где εij КАЛ - калибровочные значения продольной деформации трубопровода в точках крепления сенсоров к трубопроводу;
γij - угловая координата погонной длины и углового положения точки крепления сенсора;
R - радиус трубопровода;
γ0i КАЛ - калибровочные значения угла, перпендикулярного плоскости изгиба трубопровода;
ρi КАЛ - калибровочные значения радиуса изгиба трубопровода.
после калибровочной настройки системы значение продольной деформации, зафиксированное системой контроля напряженно-деформированного состояния трубопровода εij ФИКС, определяется как:
εij ФИКС = εij СЕНС + εij КАЛ - εij СЕНС НАЧ,
после перемещения трубопровода в траншею до его засыпки грунтом снова с помощью измерительного оборудования на контролируемом участке трубопровода определяют положение в пространстве точек на поверхности трубопровода на поверхности распределенных волоконно-оптических сенсоров продольной деформации, включая контрольные точки, и корректируют информационную геометрическую модель трубопровода.
Суть изобретения заключается в том, что при калибровке создается информационная геометрическая модель трубопровода, в которой будут исключена систематическая ошибка, вызванная несовпадением реального пространственного положения точки на поверхности волоконно-оптического сенсора продольной деформации и значением координаты этой точки в системе контроля напряженно-деформированного состояния заглубленного трубопровода. Это позволяет достоверно характеризовать положение в пространстве трубопровода пространственным положением его оси. При этом текущая координата оси трубопровода может быть определена по измерениям геометрического положения трубопровода в пространстве, а затем скорректирована на основе уточненных измерений при перемещении трубопровода на дно траншеи. Относительно этой текущей координаты могут быть выполнены вычисления значения радиуса изгиба трубопровода и определена плоскость, в которой происходит изгибная деформация, которую удобно характеризовать углом направления перпендикуляра к этой плоскости.
Операция локального упругого механического воздействия на сенсор в точке, пространственные, координаты которой известны, позволяет при калибровке исключить систематическую ошибку, вызванную несовпадением реального пространственного положения точки на поверхности волоконно-оптического сенсора продольной деформации и значением координаты этой точки в системе контроля напряженно-деформированного состояния заглубленного трубопровода.
Кроме того, при калибровке исключается систематическая ошибка, вызванная тем, что при сборке трубопровода путем сварки из отдельных труб на поверхности земли, из-за неровностей поверхности земли появляются изгибные напряжения. Эти напряжения измеряются и учитываются при дальнейшем контроле напряженно-деформированного состояния заглубленного трубопровода. Для этого в значение продольной деформации, зафиксированное измерительной аппаратурой системы контроля напряженно-деформированного состояния трубопровода, вносят поправку, связанную не только с первоначальным натяжением сенсора, но и учитывающую калибровочные значения продольной деформации трубопровода в точках крепления сенсоров к трубопроводу от угловых координат.
В результате в процессе калибровки будут исключены систематические ошибки, вызванные изгибными деформациями, которые заглубляемый трубопровод неизбежно принимает при помещении на земную поверхность в процессе сборки. Кроме того, точность калибровки повысится при выполнении мероприятий по исключении систематической ошибки, вызванную несовпадением реального пространственного положения точки на поверхности волоконно-оптического сенсора продольной деформации и значением координаты этой точки в системе контроля напряженно-деформированного состояния заглубленного трубопровода.
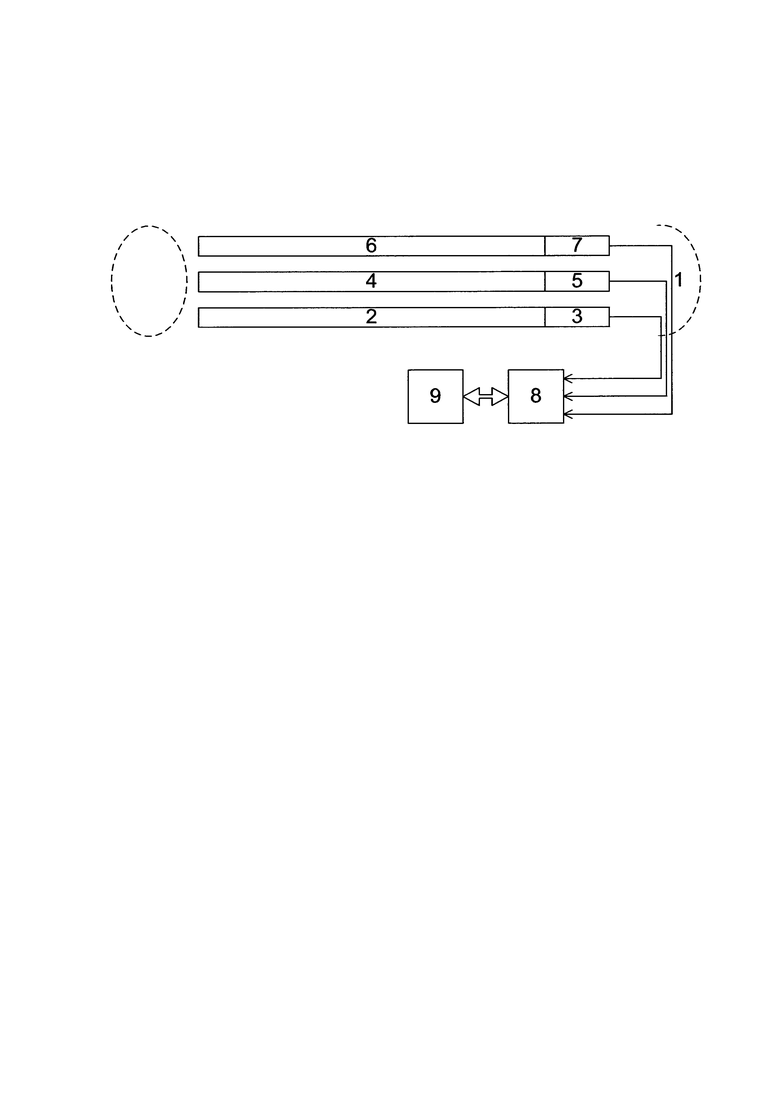
Предлагаемый способ калибровки системы контроля напряженно-деформированного состояния заглубленного трубопровода может быть реализован при настройке системы контроля напряженно-деформированного состояния заглубленного трубопровода. Блок-схема системы контроля напряженно-деформированного состояния заглубленного трубопровода представлена на фиг., здесь 1 - заглубляемый трубопровод, 2, 4, 6 распределенные волоконно-оптические сенсоры, 3, 5, 7 - блоки оконечного оборудования распределенных волоконно-оптических сенсоров, 8 - блок обработки информации, 9 -автоматизированное рабочее место диспетчера.
Распределенные волоконно-оптические сенсоры 2, 4, 6 с блоками оконечного оборудования 3, 5, 7 прикреплены к изоляции трубопровода 1. Распределенные волоконно-оптические сенсоры с блоками оконечного оборудования 2,4,6 располагаются на поверхности заглубляемого трубопровода 1 так, чтобы в каждом поперечном сечении заглубляемого трубопровода дуги между распределенными волоконно-оптическими сенсорами составляли 120 градусов, при этом дуга между двумя нижними сенсорами так же составляет 120 градусов.
Выходы блоков оконечного оборудования 3,5,7 с помощью информационных кабелей присоединены к входу блока обработки информации 8. Выход блока обработки информации к с помощью информационной шины присоединен ко входу автоматизированного рабочего места диспетчера 9.
Настройка системы контроля напряженно-деформированного состояния заглубленного трубопровода выполняется следующим образом:
1. Собирают на поверхности заглубляемый трубопровод 1 путем прикрепления между собой отрезков труб с радиусом R параллельно оси трубопровода при помощи сварки.
2. На контролируемом участке трубопровода 1, к внешней поверхности трубопровода 1, к его изоляции прикрепляют три распределенных волоконно-оптических сенсора продольной деформации 2, 4, 6, при этом в каждом i-м поперечном сечении трубопровода каждый j-й сенсор крепится в точке соответствующей величине хi погонной длины оси трубопровода с угловыми координатами γij с первоначальным натяжением εij СЕНС НАЧ.
3. Каждый из сенсоров 2, 4, 6 подключают к своим блокам оконечного оборудования, соответственно 3, 5, 7.
4. Блоки оконечного оборудования 3, 5, 7 подключают к блоку обработки информации 8, соединенному с автоматизированным рабочим местом диспетчера 9, образующими аппаратуру системы контроля напряженно-деформированного состояния трубопровода, способной выполнять измерения значений продольной деформации εij СЕНС для каждого j-го сенсора в каждом i-м поперечном сечении трубопровода, соответствующей величине xi погонной длины оси трубопровода.
5. При калибровке при помощи блока обработки информации 8 и автоматизированного рабочего места диспетчера 9 выполняют измерения значений продольной деформации εij СЕНС КАЛ и убеждаются, что зафиксированная величина при калибровке близка к заданной величине первоначального натяжения εij СЕНС КАЛ ≈ εij СЕНС НАЧ.
6. На поверхности сенсоров 2,4,6 отмечают контрольные точки.
7. Для каждого j-го сенсора из сенсоров 2, 4, 6 при включенной аппаратуре системы контроля напряженно-деформированного состояния трубопровода осуществляют локальное упругое механическое воздействие на сенсор в выбранных контрольных точках и фиксируют наличие реакции на это воздействие в системе и осуществляют привязку каждой контрольной точки на поверхности сенсоров 2, 4, 6 к текущей величине xi погонной длины оси трубопровода с угловыми координатами γij в системе контроля напряженно-деформированного состояния трубопровода.
8. С помощью измерительного оборудования на контролируемом участке трубопровода 1 определяют положение в пространстве точек на поверхности сенсоров 2, 4, 6, включая контрольные точки.
9. На основе выполненных измерений создают информационную геометрическую модель трубопровода 1, в которой определяют положение в пространстве оси трубопровода на основе решения геометрической задачи определения координаты точки на оси цилиндра по координатам нескольких точек на его поверхности, при этом для каждого i-го поперечного сечения трубопровода 1 соответствующего величине xi погонной длины оси трубопровода и каждого j-го сенсора определяют угловую координату γij точки его крепления к трубопроводу 1.
10. Для каждого i-го поперечного сечения трубопровода 1 вычисляют калибровочные значения радиуса ρi КАЛ изгиба трубопровода и калибровочные значения угла γ0i КАЛ - перпендикулярного плоскости изгиба трубопровода в результате изгибной деформации, с помощью которых фиксируют калибровочные зависимости значений продольной деформации трубопровода εij КАЛ в точках крепления сенсоров 2, 4, 6 к трубопроводу 1 от угловых координат γij как:
εij КАЛ = R sin(γ0i КАЛ - γij)/ρi КАЛ.
11. Выполняют калибровочную настройку системы, при которой в каждом i-м поперечном сечении трубопровода соответствующим величине xi погонной длины оси трубопровода 1 и точке крепления j-го сенсора к трубопроводу 1 ставят в соответствие с учетом величины первоначального натяжения известное калибровочное значение продольной деформации трубопровода с зафиксированным измерительной аппаратурой системы контроля напряженно-деформированного состояния трубопровода значением продольной деформации этого j-го распределенного волоконно-оптического сенсора для значения величины погонной длины xi как:
εij ФИКС = εij СЕНС + εij КАЛ - εij СЕНС НАЧ.
12. После перемещения трубопровода 1 в траншею до его засыпки грунтом снова с помощью измерительного оборудования на контролируемом участке трубопровода 1 определяют положение в пространстве точек на поверхности сенсоров 2, 4, 6, включая контрольные точки, и корректируют информационную геометрическую модель трубопровода 1.
Система контроля напряженно-деформированного состояния заглубленного трубопровода, при настройке которой может быть реализован предлагаемый способ калибровки системы контроля напряженно-деформированного состояния заглубленного трубопровода, может быть реализована при использовании оборудования прототипа [СВ. Смирнов, Х.В. Иванов Волоконно-оптические технологии для создания безопасных условий эксплуатации трубопроводных систем в труднодоступных и сложных природно-климатических регионах // Безопасность Труда в Промышленности, 2017, №2, стр. 33-39, www.safety.ru]. При этом при монтаже распределенные волоконно-оптические сенсоры 2, 4, 6 закрепляются на поверхности заглубляемого трубопровода 1 параллельно его оси так, что в каждом поперечном сечении заглубляемого трубопровода точки крепления разделены друг от друга дугами величиной 120 градусов, при этом первый распределенный волоконно-оптический сенсор соответствуют угловому положению 0 градусов (в верхней точке), второй распределенный волоконно-оптический сенсор соответствуют угловому положению 120 градусов (влево от верхней точки), третий распределенный волоконно-оптические сенсор соответствуют угловому положению -120 градусов (вправо от верхней точки).
Контрольные точки могут отмечаться при помощи контрастных маркеров, наносимых при помощи краски, либо путем приклейки светоотражающих стеклянных стразов.
В качестве измерительного оборудования для определения положения в пространстве точек на поверхности трубопровода на поверхности распределенных волоконно-оптических сенсоров 2, 4, 6 продольной деформации 1, включая контрольные точки, может использоваться лазерный сканер типа Leica RTC360.
Информационная геометрическая модель трубопровода может создаваться с помощью одного из программных моделирующих комплексов, широко представленных сегодня на рынке, в частности, например, при помощи программного моделирующего комплекса National Instruments Labview 2012.
Таким образом, предлагаемое техническое решение позволяет увеличить точность калибровочных операций при настройке систем мониторинга состояния заглубленного трубопровода путем устранения систематических погрешностей при помощи калибровки системы контроля напряженно-деформированного состояния заглубляемого трубопровода использующих волоконно-оптические сенсоры продольной деформации. При калибровке учитываются изгибные деформации, появляющиеся при размещении заглубляемого трубопровода на поверхности земли в процессе его сборки, и реальное пространственное положение волоконно-оптических сенсоров продольной деформации.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ контроля напряженно-деформированного состояния заглубленного трубопровода | 2019 |
|
RU2729304C1 |
| СПОСОБ КОНТРОЛЯ РЕЛЬСОВЫХ ПЛЕТЕЙ БЕССТЫКОВОГО ЖЕЛЕЗНОДОРОЖНОГО ПУТИ | 2012 |
|
RU2521114C1 |
| УСТРОЙСТВО ДИСТАНЦИОННОГО КОНТРОЛЯ СОСТОЯНИЯ БЕЗБАЛЛАСТНОГО ЖЕЛЕЗНОДОРОЖНОГО ПУТИ | 2015 |
|
RU2613126C1 |
| СПОСОБ АВТОМАТИЧЕСКОЙ КАЛИБРОВКИ УГЛОВ КРЕПЛЕНИЯ ВИДЕОКАМЕР В СОСТАВЕ СИСТЕМ ТЕХНИЧЕСКОГО ЗРЕНИЯ | 2023 |
|
RU2804826C1 |
| СПОСОБ КОМПЛЕКСНОЙ ОЦЕНКИ ПОКАЗАТЕЛЕЙ, ОПРЕДЕЛЯЮЩИХ ТЕХНИЧЕСКОЕ СОСТОЯНИЕ ТРУБОПРОВОДНЫХ СИСТЕМ, И СИСТЕМА МОНИТОРИНГА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2020 |
|
RU2767263C1 |
| СПОСОБ КОНТРОЛЯ ПОЛОЖЕНИЯ ТРУБОПРОВОДОВ НАДЗЕМНОЙ ПРОКЛАДКИ В УСЛОВИЯХ ВЕЧНОЙ МЕРЗЛОТЫ | 2014 |
|
RU2582428C2 |
| СПОСОБ ПРЕДОТВРАЩЕНИЯ КОРРОЗИОННОГО РАСТРЕСКИВАНИЯ ПОД НАПРЯЖЕНИЕМ В ПОДЗЕМНЫХ ТРУБОПРОВОДАХ | 2017 |
|
RU2638121C1 |
| СПОСОБ КАЛИБРОВКИ СЕНСОРОВ КОЛЕСНОЙ ОДОМЕТРИИ | 2023 |
|
RU2821391C1 |
| СПОСОБ КОНТРОЛЯ БЕССТЫКОВОГО ЖЕЛЕЗНОДОРОЖНОГО ПУТИ | 2017 |
|
RU2656777C2 |
| Тестовый шаблон для калибровки видеодатчиков многоспектральной системы технического зрения | 2017 |
|
RU2672466C1 |
Изобретение относится к способам мониторинга состояния заглубленных трубопроводов. Для учета начальных напряжений, возникающих при сборке трубопровода путем сварки из отдельных труб из-за неровностей поверхности земли и приводящих к изгибным деформациям и соответствующим напряжениям в теле трубопровода, выполняют измерения реального положения трубопровода в пространстве и вычисляют начальные изгибные деформации, что позволяет при калибровке исключить систематическую ошибку. Кроме того, измерения реального положения трубопровода в пространстве позволяет при калибровке исключить систематическую ошибку, вызванную несовпадением реального пространственного положения точки на поверхности волоконно-оптического сенсора продольной деформации и значением координаты этой точки в системе контроля напряженно-деформированного состояния заглубленного трубопровода. Изобретение обеспечивает увеличение точности калибровочных операций при настройке систем мониторинга состояния заглубленного трубопровода путем устранения систематических погрешностей при помощи калибровки системы контроля напряженно-деформированного состояния заглубляемого трубопровода, использующей волоконно-оптические сенсоры продольной деформации. 1 ил.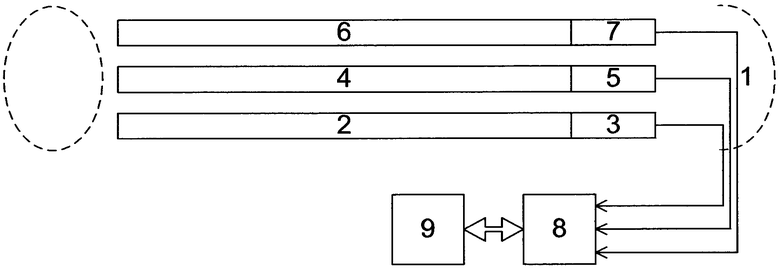
Способ калибровки системы контроля напряженно-деформированного состояния заглубляемого трубопровода, заключающийся в том, что собирают на поверхности заглубляемый трубопровод путем соединения между собой отрезков труб с радиусом R параллельно оси трубопровода при помощи сварки на контролируемом участке трубопровода, к внешней поверхности трубопровода, к его изоляции прикрепляют N распределенных волоконно-оптических сенсоров продольной деформации, при этом в каждом i-м поперечном сечении трубопровода каждый j-й сенсор крепится в точке, соответствующей величине xi погонной длины оси трубопровода, с угловыми координатами γij, с первоначальным натяжением εij СЕНС. НАЧ, каждый j-й сенсор подключают к измерительной аппаратуре системы контроля напряженно-деформированного состояния трубопровода, способной выполнять измерения значений продольной деформации εij СЕНС для каждого j-го сенсора в каждом i-м поперечном сечении трубопровода, соответствующей величине xi погонной длины оси трубопровода, выполняют калибровочную настройку системы, при которой в каждом i-м поперечном сечении трубопровода, соответствующем величине xi погонной длины оси трубопровода и точке крепления j-го сенсора к трубопроводу с учетом величины первоначального натяжения, ставят в соответствие известное калибровочное значение продольной деформации трубопровода с зафиксированным измерительной аппаратурой системы контроля напряженно-деформированного состояния трубопровода значением продольной деформации этого j-го распределенного волоконно-оптического сенсора для значения величины погонной длины xi, после чего трубопровод помещают в грунт и осуществляют непрерывный анализ напряженно-деформированного состояния трубопровода путем непрерывного сравнения текущих зафиксированных значений продольной деформации трубопровода εij ФИКС с соответствующими значениями продольной деформации трубопровода при первоначальном и предыдущих измерениях и с заданными пороговыми значениями продольной деформации трубопровода, по результатам сравнения выявляют участки напряженно-деформированного состояния трубопровода с повышенной деформацией, а информацию о погонной координате xi ПОВ. ДЕФ, угловой координате γij ПОВ. ДЕФ и параметрах продольной деформации трубопровода на участке с повышенной деформацией выводят на экран автоматизированного рабочего места диспетчера, отличающийся тем, что при калибровке при помощи системы контроля напряженно-деформированного состояния трубопровода выполняют измерения значений продольной деформации εij СЕНС. КАЛ и убеждаются, что зафиксированная величина при калибровке близка к заданной величине первоначального натяжения εij СЕНС. КАЛ ≈ εij СЕНС. НАЧ, при калибровочной настройке системы до заглубления трубопровода отмечают контрольные точки на поверхности трубопровода на поверхности распределенных волоконно-оптических сенсоров продольной деформации, для каждого j-го сенсора при включенной системе осуществляют локальное упругое механическое воздействие на сенсор в выбранных контрольных точках, фиксируют наличие реакции на это воздействие в системе и осуществляют привязку каждой контрольной точки к текущей величине xi погонной длины оси трубопровода с угловыми координатами γij в системе контроля напряженно-деформированного состояния трубопровода, с помощью измерительного оборудования на контролируемом участке трубопровода определяют положение в пространстве точек на поверхности трубопровода на поверхности распределенных волоконно-оптических сенсоров продольной деформации, включая контрольные точки, на основе выполненных измерений создают информационную геометрическую модель трубопровода, в которой определяют положение в пространстве оси трубопровода на основе решения геометрической задачи определения координаты точки на оси цилиндра по координатам нескольких точек на его поверхности, при этом для каждого i-го поперечного сечения трубопровода, соответствующего величине хi погонной длины оси трубопровода и каждого j-го сенсора, определяют угловую координату γij точки его крепления к трубопроводу, после этого для каждого i-го поперечного сечения трубопровода вычисляют калибровочные значения радиуса ρi КАЛ изгиба трубопровода и калибровочные значения угла γ0i КАЛ, перпендикулярного плоскости изгиба трубопровода в результате изгибной деформации, с помощью которых вычисляют калибровочные зависимости значений продольной деформации трубопровода εj КАЛ в точках крепления сенсоров к трубопроводу от угловых координат γij как:
εij КАЛ = R sin(γ0i КАЛ - γij)/ρi КАЛ,
где εij КАЛ - калибровочные значения продольной деформации трубопровода в точках крепления сенсоров к трубопроводу;
γij - угловая координата погонной длины и углового положения точки крепления сенсора;
R - радиус трубопровода;
γ0i КАЛ - калибровочные значения угла, перпендикулярного плоскости изгиба трубопровода;
ρi КАЛ - калибровочные значения радиуса изгиба трубопровода.
в результате изгибной деформации после калибровочной настройки системы значение продольной деформации, зафиксированное системой контроля напряженно-деформированного состояния трубопровода εij ФИКС, определяется как:
εij ФИКС = εij СЕНС + εij КАЛ - εij СЕНС. НАЧ,
где εij ФИКС - значение, зафиксированное j-м сенсором системы контроля напряженно-деформированного состояния трубопровода в i-м поперечном сечении трубопровода;
εij СЕНС - значение продольной деформации, измеренное j-м сенсором в i-м поперечном сечении трубопровода;
εij КАЛ - калибровочные значения продольной деформации трубопровода в точках крепления j-го сенсора в i-м поперечном сечении трубопровода;
εij СЕНС. НАЧ - первоначальное натяжение j-го сенсора в i-м поперечном сечении трубопровода;
после перемещения трубопровода в траншею до его засыпки грунтом снова с помощью измерительного оборудования на контролируемом участке трубопровода определяют положение в пространстве точек на поверхности трубопровода на поверхности распределенных волоконно-оптических сенсоров продольной деформации, включая контрольные точки, и корректируют информационную геометрическую модель трубопровода.
| Ермилов А.Л | |||
| и др | |||
| Мониторинг деформации трубопровода и подвижек грунта на объекте магистральный с газопровод "Сахалин-Хабаровск-Владивосток", Фотон-экспресс, N5 (125), сентябрь, 2015, стр | |||
| Паровоз для отопления неспекающейся каменноугольной мелочью | 1916 |
|
SU14A1 |
| СПОСОБ МОНИТОРИНГА И ОЦЕНКИ ТЕХНИЧЕСКОГО СОСТОЯНИЯ МАГИСТРАЛЬНОГО ТРУБОПРОВОДА И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2011 |
|
RU2451874C1 |
| СПОСОБ МОНИТОРИНГА ТЕХНИЧЕСКОГО СОСТОЯНИЯ ТРУБОПРОВОДА И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2563419C2 |
| СПОСОБ ОЦЕНКИ НАПРЯЖЕННО-ДЕФОРМИРОВАННОГО СОСТОЯНИЯ МАГИСТРАЛЬНОГО ТРУБОПРОВОДА С ДЕФЕКТНЫМИ СВАРНЫМИ СТЫКАМИ | 2016 |
|
RU2656163C2 |
| KR 20180050752 A, 15.05.2018 | |||
| FR 2864202 A1, 24.06.2005. | |||

