Область техники
Техническое решение относится к машиностроению, а именно к вспомогательному оборудованию для обслуживания шахтной многоканатной подъемной машины.
Предшествующий уровень техники
Известен способ проточки желобков футеровки приводного шкива многоканатной подъемной установки, в котором:
- длину навивочной поверхности каждого желобка определяют, например, курвиметром, после чего, на основании полученных данных, определяют величину длины навивочной поверхности желобка;
- выполняется запись профилограммы желобка с использованием устройства для контроля радиального износа, подключенного к самописцу;
- величину износа каждого желобка в точке, соответствующей началу (концу) профилограммы определяют глубиномером;
- длину профилограммы определяют курвиметром;
- измеряют длину прямой, соединяющей начало и конец профилограммы;
- определяют расстояние от оси вращения приводного шкива до точки отсчета подачи на навивочной поверхности желобка футеровки из соотношения:
Ri=R0+НФ-h,
где:
R0 - радиус наружной поверхности оболочки приводного шкива;
НФ - высота футеровки;
hi - величина износа каждого желобка футеровки в точке, соответствующей началу (концу) профилограммы.
Затем вычисляют коэффициент масштаба профилограммы по оси ординат и определяют величину подачи резца Δh.
Из выше приведенного видно, что для реализации способа использована система, которая содержит несколько измерительных устройств.
Недостатком ближайшего аналога является поэтапное вычисления радиуса Ri и величины подачи резца Δh с использованием устройства для построения профилограммы, что усложняет вычисление необходимых параметров для диагностики износа футеровки канатоведущего шкива, а та же увеличивает время диагностики.
Задача
В основу создания технического решения поставлена задача:
создание автоматизированной системы мониторинга износа; футеровки канатоведущего шкива.
Технический результат
Технический результат заключается в объединении в одну автоматизированную систему процессов сбора, обработки и визуализации данных от нескольких измерительных устройств, обеспечивающих удаленный контроль износа футеровки канатоведущего шкива.
Достижение заявленного технического результата обеспечивает техническому решению потребительские свойства: повышение удобства эксплуатации и обслуживания канатоведущего шкива, которые позволяют улучшить состояние техники безопасности и снизить трудоемкость получения данных, получить возможность планирования сервисного обслуживания футеровки канатоведущего шкива и исключить аварии.
Раскрытие технического решения
Решение поставленной задачи достигается тем, что в системе диагностики износа футеровки канатоведущего шкива подъемной машины, включающей устройство для измерения длины окружности канавки футеровки канатоведущего шкива, которое содержит измеритель длины, и устройство для измерения расстояния до дна канавки футеровки канатоведущего шкива, которое содержит измеритель глубины, предлагается в систему дополнительно ввести размещенные вне шкива, соединенный, по меньшей мере, с одним терминалом ввода и/или вывода данных, блок управления, который содержит функционально связанные блок обработки данных и блок приема и передачи данных, к которому подключены, размещенные вне блока управления, импульсный датчик, связанный с измерителем длины окружности канавки футеровки; канатоведущего шкива, датчик, связанный с измерителем глубины до дна канавки футеровки канатоведущего шкива, датчик полного оборота шкива, который взаимодействует с сигнальной меткой, размещенной на шкиве.
Перечисленные выше существенные признаки технического решения, отличные от ближайшего аналога, необходимы и достаточны во всех случаях, на которые распространяется объем правовой охраны изобретения.
Кроме того, предлагается:
- блок приема и передачи данных выполнить, по меньшей мере, с одним беспроводным интерфейсом связи;
- терминал ввода и/или вывода данных и блок управления совместить в один моноблок;
- дополнительно в систему ввести терминал удаленного ввода и/или вывода данных подключенный к блоку приема и передачи данных через сеть связи;
- устройство для измерения расстояния до дна канавки футеровки канатоведущего шкива выполнить в виде лазерного дальномера;
- датчик полного оборота шкива выполнить оптическим, с возможностью фиксации светового отражения сигнальной метки;
- датчик полного оборота шкива выполнить индуктивным, с возможностью фиксации магнитного поля сигнальной метки;
- устройство для измерения длины окружности и устройство для измерения расстояния до дна канавки выполнить в виде единого модуля.
Техническое решение поясняется примером, выполнение которого не является единственно возможным, но наглядно демонстрирует возможность достижения технического результата предложенной новой совокупностью существенных признаков.
Сущность технического решения представлена на чертежах, где:
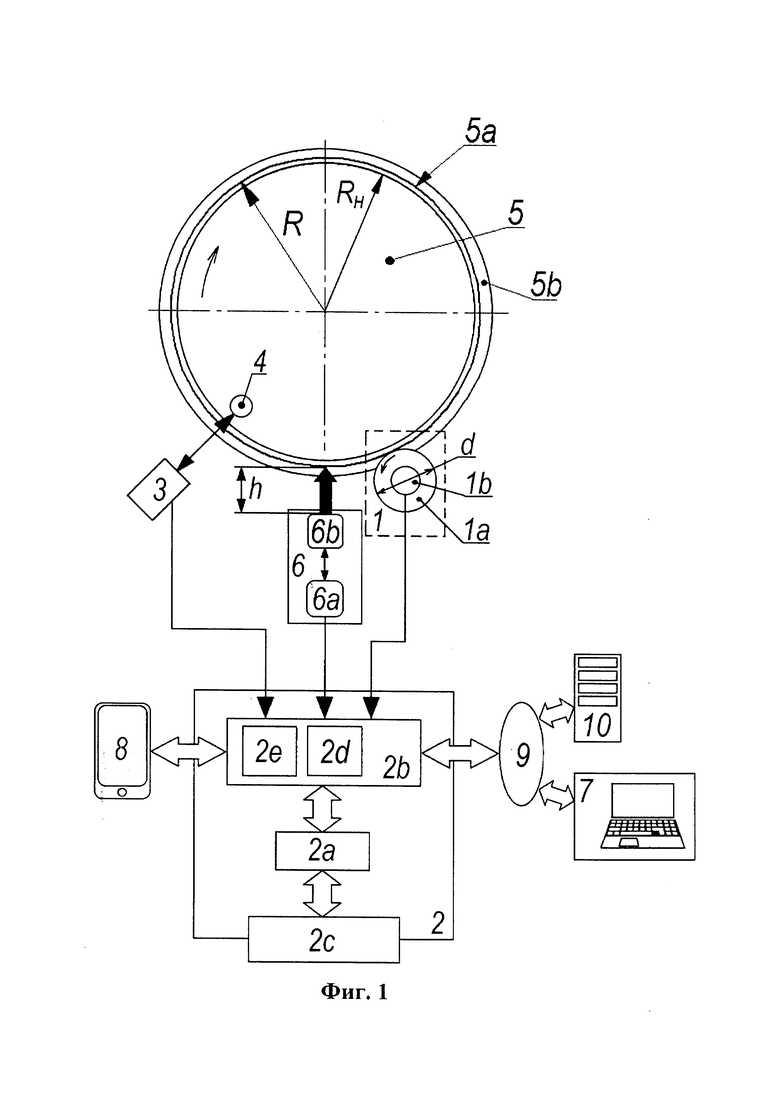
- на фиг. 1 показана принципиальная схема взаимодействия устройств, объединенных в систему диагностики износа футеровки канатоведущего шкива.
Краткое описание чертежей
1 - устройство для измерения длины окружности;
1а - измеритель длины;
1b - датчик;
2 - блок управления;
2а - блок обработки данных;
2b - блок приема и передачи данных;
2с - терминал ввода и/или вывода данных;
2е - беспроводной коммуникационный интерфейс;
2d - проводной интерфейс связи;
3 - датчик полного оборота;
4 - сигнальная метка;
5 - канатоведущий шкив;
5а - дно канавки;
5b - футеровка;
6 - устройство для измерения расстояния;
6а - измеритель глубины;
6b - датчик;
7 - терминал удаленного ввода и/или вывода данных;
8 - смартфон;
9 - сеть связи;
10 - сервер.
Промышленная применимость
В качестве устройства для измерения длины окружности (1) может быть использован курвиметр, зафиксированный и размещенный под канатоведущим шкивом (5). Измеритель длины (1а) на фиг. 1 представлен схематически в виде исполнительного органа курвиметра - измерительного колеса, а датчик (1b) выполненного в виде импульсного энкодера, установленного на кронштейне курвиметра для считывания и передачи импульсов при изменении угла поворота измерительного колеса.
Устройство для измерения расстояния (6) до дна канавки (5а) футеровки (5b) канатоведущего шкива (5) представлено в виде лазерного дальномера, зафиксированного и размещенного под канатоведущим шкивом (5). Измеритель глубины (6а) представлен в виде лазерного излучателя, а датчик (6b) выполнен в виде преобразователя аналогового сигнала от лазерного излучателя и его передачи на блок управления (2).
Датчик полного оборота (3) канатоведущего шкива (5) может быть выполнен, как индуктивным, так и оптическим и устанавливается на неподвижной части подъемной машины. При использовании индуктивного датчика полного оборота (3) используется сигнальная метка (4), которая выполнена в виде постоянного магнита, закрепленного на канатоведущем шкиве (5). При использовании оптического датчика полного оборота (3), используется сигнальная метка (4), которая выполнена в виде светоотражающего вещества, нанесенного на канатоведущий шкив (5).
Блок управления (2) представлен в виде автономного устройства, в котором размещены блок обработки данных (2а), представленный в виде микроконтроллера, который взаимодействует с блоком приема и передачи данных (2b). Блок приема и передачи данных (2b) содержит один или несколько беспроводных интерфейсов связи (2е) (например, bluetooth, wi-fi, IrDA) и по умолчанию содержит проводной интерфейс связи (2d).
Терминал ввода и/или вывода данных (2с) может быть выполнен в виде панели световых индикаторов (монитора) и клавиатуры. На фиг. 1 терминал ввода и/или вывода данных (2с) встроен в блок управления (2) и взаимодействует непосредственно с блоком обработки данных (2а). Исполнение блока управления (2) может быть без встроенного терминала ввода и/или вывода данных (2с), вследствие чего ввод и вывод информации будет осуществляться через блок приема и передачи данных (2b) беспроводным подключением смартфона (8) (например, через bluetooth), проводным или беспроводным подключением через сеть связи (9) (интернет) терминала удаленного ввода и/или вывода данных (7) и удаленного сервера (10). В качестве терминала удаленного ввода и/или вывода данных (7) может быть использован ноутбук или стационарный персональный компьютер.
Для начала диагностики измеритель длины (1а) прижимается к дну канавки (5 а) с усилием достаточным для обеспечения проворачивания измерителя длины (1а) без проскальзывания, при вращении канатоведущего шкива (5), а также которое исключает деформацию дна канавки (5а) и деформацию футеровки (5b).
Измеритель глубины (6а) размещен так, чтобы обеспечить измерение расстояния до дна канавки (5а) в непосредственной близости от измерителя длины (1а) (курвиметра). Перед началом измерений через терминал ввода и/или вывода данных (2с) оператор вводит в блок управления (2) номер измеряемой канавки N и значение диаметра d измерителя длины (1а) (измерительного колеса курвиметра), настраивает дату и время диагностики. Через блок управления (2) подается команда машинисту на запуск вращения канатоведущего шкива (5) в любом направлении. Датчик полного оборота (3) фиксирует полный оборот канатоведущего шкива (5) по размещенной на нем сигнальной метке (4). При вращении канатоведущего шкива (5) измеритель длины (1а) обкатывается по дну канавки (5а), датчик (1b) (энкодер) передает импульсы через блок приема и передачи данных (2b) в блок обработки данных (2а). При прохождении сигнальной метки (4) в зоне действия датчика полного оборота (3), на блок обработки данных (2а) поступает сигнал, после чего начинается автоматическая запись блоком обработки данных (2а) количества импульсов N от датчика (1b) курвиметра и запись цифрового ряда, переданного датчиком (6b) лазерного дальномера. Полученные значения кодов расстояний, определенных лазерным дальномером и соответствующие им количество импульсов датчика (1b) сохраняются в памяти блока обработки данных (2а). При повторной фиксации датчиком полного оборота (3) сигнальной метки (4), блок обработки данных (2) прерывает учет данных и производит расчет и вывод показателей:
L - длины окружности навивочной поверхности канатоведущего шкива (5), мм;
R - среднего радиуса навивки по дну канавки (5а) канатоведущего шкива (5);
h - наибольшего значения дистанции до дна канавки (5а).
Вычисления производятся по формулам:
где
К - количество импульсов датчика (1b) на один оборот измерителя длины (1а) (измерительного колеса курвиметра);
N - подсчитанное количество импульсов датчика (1b) за один оборот канатоведущего шкива (5);
d - диаметр измерителя длины (1а) (измерительного колеса курвиметра), мм.
Информация с результатами вычислений выводится на монитор терминала ввода и/или вывода данных (2с) и/или смартфон (8) и/или терминал удаленного ввода и/или вывода данных (7).
Введение в систему датчика полного оборота (3) позволяет зафиксировать начало и окончания съема показателей датчиков (6а и 1b), в результате чего упрощается расчет длины окружности (L) навивочной поверхности канатоведущего шкива (5) и среднего радиуса навивки (R) по дну канавки (5а) канатоведущего шкива (5). Расчет упрощается за счет исключения использования значений радиуса (Rн) наружной поверхности оболочки канатоведущего шкива (5) и высоты футеровки (5b).
Использование лазерного дальномера обеспечивает наиболее точный и оперативный вывод на терминал ввода и/или вывода данных (2с) наибольшего значения дистанции h до дна канавки (5а), а также автоматическое построение программным приложением, установленным на персональном компьютере или смартфоне (8), профилограммы для визуального анализа профиля дна канавки (5а) и автоматического вычисления величины подачи резца Ah на каждый номер футеровки (5b). В качестве персонального компьютера может быть использован смартфон (8) и терминал удаленного ввода и/или вывода данных (7).
Централизованный сбор данных для анализа периода износа нескольких канатоведущих шкивов (5) может осуществляться через сервер (10).
Уменьшение времени получения, обработки и передачи данных обеспечивается за счет совмещения сбора информации от нескольких устройств системы и централизованного вычислительных процесса в блоке управления (2).
Повышение безопасности обеспечивается за счет вывода информации на терминал ввода и/или вывода данных (2с), смартфон (8) и терминал удаленного ввода и/или вывода данных (7), которые размещаются вне зоны перемещения канатов и вращения шкива (5).
Снижение трудоемкости получения данных обеспечивается за счет автоматизации процесса учета и обработки данных через блок управления (2).
Источники информации:
1. Патент СССР №954344, бюл. №32, опубл. 30.08.1982 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ проточки желобков футеровки приводного шкива многоканатной подъемной установки | 1980 |
|
SU954344A1 |
| ТОНКАЯ ВЫСОКОПРОЧНАЯ ПРОВОЛОКА ДЛЯ ПОДЪЕМНОГО КАНАТА ЛИФТА | 2001 |
|
RU2492130C2 |
| ЛИФТ | 2002 |
|
RU2352514C2 |
| ЛИФТ С ДВУМЯ РАСПОЛОЖЕННЫМИ ДРУГ НАД ДРУГОМ ЛИФТОВЫМИ КАБИНАМИ В ОДНОЙ ШАХТЕ | 2007 |
|
RU2453489C2 |
| ШТОК ШАССИ ДЛЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 2012 |
|
RU2570614C1 |
| ЖИДКОСТНОЕ ПЕРЕКЛЮЧАЮЩЕЕ УСТРОЙСТВО | 2018 |
|
RU2696651C1 |
| КАМЕРА ДЛЯ ИЗМЕРЕНИЯ ДАВЛЕНИЯ ДЛЯ ИСПОЛЬЗОВАНИЯ В ИНФУЗИОННОЙ ИЛИ ИНЪЕКЦИОННОЙ СИСТЕМЕ | 2014 |
|
RU2609898C2 |
| ИНФОРМАЦИОННОЕ ТЕРМИНАЛЬНОЕ УСТРОЙСТВО, СИСТЕМА СБОРА ДАННЫХ О ДВИЖЕНИЯХ И СПОСОБ СБОРА ДАННЫХ О ДВИЖЕНИЯХ | 2015 |
|
RU2679533C2 |
| СКЛАДНОЕ ИЗДЕЛИЕ С АРОЧНОЙ СТРУКТУРОЙ | 2011 |
|
RU2530804C1 |
| УЛЬТРАШИРОКОПОЛОСНАЯ КОМПАКТНАЯ РУПОРНО-МИКРОПОЛОСКОВАЯ АНТЕННА С ВЫСОКОЙ НАПРАВЛЕННОСТЬЮ | 2004 |
|
RU2289873C2 |
Изобретение относится к вспомогательному оборудованию для обслуживания шахтной многоканатной подъемной машины. Система диагностики износа футеровки канатоведущего шкива подъемной машины, включающая устройство для измерения длины окружности (1) по дну канавки (5а) футеровки (5b) канатоведущего шкива (5), которое содержит измеритель длины (1а), и устройство для измерения расстояния (6) до дна канавки (5а) футеровки (5b) канатоведущего шкива (5), которое содержит измеритель глубины (6а), а также блок управления (2), который содержит функционально связанные блок обработки данных (2а) и блок приема и передачи данных (2b), к которому подключены, импульсный датчик (1b), связанный с измерителем длины (1а), датчик (6b), связанный с измерителем глубины (6а) до дна канавки (5а) футеровки (5b) канатоведущего шкива (5), датчик полного оборота (3) шкива (5), который взаимодействует с сигнальной меткой (4), размещенной на шкиве (5). Техническим результатом является повышение удобства, эксплуатации и обслуживания канатоведущего шкива, которые позволяют улучшить состояние техники безопасности и снизить трудоемкость получения данных, возможность планирования сервисного обслуживания и исключение аварии. 7 з.п. ф-лы, 1 ил.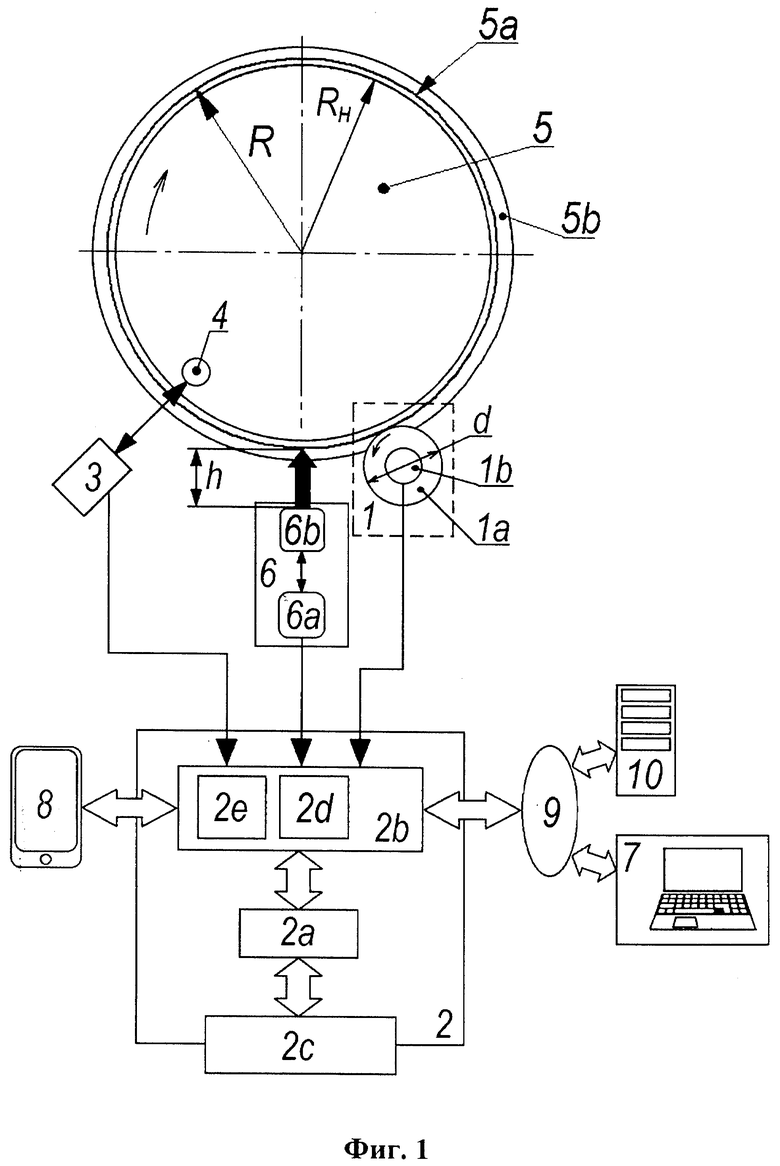
1. Система диагностики износа футеровки канатоведущего шкива подъемной машины, включающая устройство для измерения длины окружности (1) по дну канавки (5а) футеровки (5b) канатоведущего шкива (5), которое содержит измеритель длины (1а), и устройство для измерения расстояния (6) до дна канавки (5а) футеровки (5b) канатоведущего шкива (5), которое содержит измеритель глубины (6а), отличающаяся тем, что в систему дополнительно введены размещенные вне шкива (5), соединенный, по меньшей мере, с одним терминалом ввода и/или вывода данных (2с), блок управления (2), который содержит функционально связанные блок обработки данных (2а) и блок приема и передачи данных (2b), к которому подключены, размещенные вне блока управления (2), импульсный датчик (1b), связанный с измерителем длины (1а) окружности (1) по дну канавки (5а) футеровки (5b) канатоведущего шкива (5), датчик (6b), связанный с измерителем глубины (6а) до дна канавки (5а) футеровки (5b) канатоведущего шкива (5), датчик полного оборота (3) шкива (5), который взаимодействует с сигнальной меткой (4), размещенной на шкиве (5).
2. Система по п. 1, отличающаяся тем, что блок приема и передачи данных (2b) содержит, по меньшей мере, один беспроводной интерфейс связи (2е).
3. Система по п. 1, отличающаяся тем, что терминал удаленного ввода и/или вывода данных (2с) и блок управления (2) совмещены в один моноблок.
4. Система по одному из пп. 1, 2 или 3, отличающаяся тем, что дополнительно в систему введен терминал ввода и/или вывода данных (7), подключенный к блоку приема и передачи данных (2b) через сеть связи (9).
5. Система по п. 1, отличающаяся тем, что устройство для измерения расстояния (6) до дна канавки (5а) футеровки (5b) канатоведущего шкива (5) выполнено в виде лазерного дальномера.
6. Система по п. 1, отличающаяся тем, что датчик полного оборота (3) шкива (5) выполнен оптическим, с возможностью фиксации светового отражения сигнальной метки (4).
7. Система по п. 1, отличающаяся тем, что датчик полного оборота (3) шкива (5) выполнен индуктивным, с возможностью фиксации магнитного поля сигнальной метки (4).
8. Система по п. 1, отличающаяся тем, что устройство для измерения длины окружности (1) по дну канавки (5а) футеровки (5b) канатоведущего шкива (5) и устройство для измерения расстояния (6) до дна канавки (5а) футеровки (5b) канатоведущего шкива (5) выполнены в виде единого модуля.
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ КОЭФФИЦИЕНТА] ТРЕНИЯ КАНАТОВФШШ SSEKPli | 1972 |
|
SU432369A1 |
| СИСТЕМА КОНТРОЛЯ ИЗНОСА, ТРАНСПОРТНАЯ УСТАНОВКА С КАНАТНЫМ ПРИВОДОМ И СПОСОБ КОНТРОЛЯ БЫСТРОИЗНАШИВАЮЩИХСЯ ДЕТАЛЕЙ ТАКОЙ ТРАНСПОРТНОЙ УСТАНОВКИ | 2009 |
|
RU2493989C2 |
| ИСПОЛНИТЕЛЬНЫЙ МЕХАНИЗМ ПОДЪЕМНОГО УСТРОЙСТВА И ПОДЪЕМНАЯ СИСТЕМА | 2007 |
|
RU2429185C2 |
| US 9850112 B2, 26.12.2017 | |||
| CN 202748375 U, 20.02.2013. | |||

