Изобретение относится к области малой авиации, а именно к беспилотным летательным аппаратам (БЛА), и может быть использовано для получения фотоснимков земной поверхности с высот порядка 100 м.
Известен БЛА типа воздушный змей, состоящий из одного или нескольких воздушных крыльев, соединенных с помощью леера (фала) с наземным или надводным объектом. БЛА снабжен дистанционной системой программного управления, управляющая часть которой размещена на указанном наземном (надводном) объекте, а управляемая - на воздушном змее. Управляющая часть выполнена в виде компьютера, использующего многозадачное программное обеспечение. Управление осуществляется путем непосредственного воздействия по радиоканалу на контролируемые датчиками полетные параметры (высоту, крен, угол атаки) БЛА, что полностью освобождает человека от управления БЛА. Безопасность полета и гарантия возврата БЛА на место старта обеспечиваются благодаря его постоянной привязке к объекту с помощью вышеупомянутого леера (свидетельство на полезную модель RU №29281, В64С 31/00).
Недостаток указанного аналога, присущий, впрочем, всем классическим комплексам с БЛА типа воздушный змей, заключается в отсутствии на борту БЛА двигательной установки, что не позволяет использовать этот БЛА в безветрие.
От указанного недостатка свободен БЛА по патенту US №6286786, В64С 31/06, содержащий крылья, прикрепленные к каркасу, на котором установлена управляемая часть системы дистанционного управления, содержащая дистанционно управляемый двигатель, органы управления направлением движения и механизм отстегивания леера, при этом управляющая часть системы дистанционного управления находится на земле - у оператора и включает в себя блок управления направлением движения БЛА, выключатель и лебедку для управления леером. Верхняя часть леера крепится с использованием механизма отстегивания леера к каркасу БЛА. При достижении леером заданной длины оператором подается команда, по которой леер отстегивается от каркаса БЛА и наматывается на барабан лебедки. Таким образом, при запуске БЛА он работает в классическом режиме воздушного змея, а после достижения заданной высоты включается дистанционно управляемый двигатель, и БЛА продолжает полет в классическом режиме самолета.
Недостатком данного БЛА является снижение степени безопасности полета после отстегивания леера, поскольку при этом в случае сбоя в системе дистанционного управления оператор теряет контроль за полетом БЛА, что может послужить причиной аварии.
Кроме того, как и вышеупомянутый аналог, указанный БЛА не несет на своем борту средств наблюдения и передачи на наземный пункт изображений земной поверхности, то есть он не может быть отнесен к системам наблюдения за земной поверхностью.
В качестве ближайшего аналога заявляемого изобретения выбран БЛА, по конструкции схожий с воздушным змеем и имеющий на своем борту аппаратуру наблюдения за земной поверхностью. К этому классу аппаратов относится БЛА CyberBug™, серийно выпускаемый американской фирмой Cyber Depense Systems (www.proxygen.com). Указанный БЛА имеет форму крыльев, сходную с формой крыльев воздушного змея (типа "рогалло"), а фюзеляж, хвостовое оперение и двигатель с винтом характерны для конструкции самолета. На борту БЛА CyberBug™ установлены также система автоматического управления полетом (автопилот), панорамный цифровой фотоаппарат и аппаратура передачи изображений и данных автопилота на землю.
Изображения земной поверхности и данные автопилота принимаются наземным (носимым или возимым) комплексом, в котором осуществляются цифровая обработка и отображение информации видеонаблюдения за земной поверхностью. Оператор указанного наземного комплекса имеет возможность наблюдать опасные участки земной поверхности, осматривать местность вокруг строений, "заглядывать" за холмы и решать многие другие тактические задачи воздушного наблюдения.
Достоинством БЛА CyberBug™ по сравнению с другими БЛА аэродинамического типа (самолетами) является его относительно невысокая стоимость. Однако при этом он существенно проигрывает классическим конструкциям самолетов по продолжительности, скорости и дальности полета. К этому добавляется опасность потери БЛА и возможные непредсказуемые ситуации в случае сбоев в системе дистанционного управления.
Настоящее изобретение направлено на устранение указанных недостатков. Предлагается использовать леерную схему, характерную для воздушных змеев, при сохранении возможностей полета за счет двигательной установки и наблюдения за земной поверхностью, характерных для БЛА типа CyberBug™.
Предметом изобретения является система наблюдения за земной поверхностью с БЛА, содержащая установленные на БЛА контроллер, связанный с аппаратурой наблюдения, автопилотом и первым приемопередающим модулем, двигательную установку и рулевой привод, подключенные к соответствующим выходам контроллера, аэродинамические рули, соединенные с выходом рулевого привода, а также наземное носимое или возимое устройство обработки информации и управления, включающее в себя второй приемопередающий модуль, выполненный с возможностью обмена информацией по радиоэфиру с первым приемопередающим модулем, блок обработки и отображения информации, вход которого подключен к выходу второго приемопередающего модуля, и блок управления, первый выход которого подключен ко входу второго приемопередающего модуля, - при этом блок управления выполнен с возможностью формирования на первом выходе команд включения и выключения двигательной установки для перевода БЛА в режим самолета с леером или в режим воздушного змея при полете в условиях, соответственно, отсутствия или наличия ветра, при этом для осуществления второго из указанных режимов в систему дополнительно введены затягивающая лебедка и леер, причем управляющий вход затягивающей лебедки подключен ко второму выходу блока управления, леер намотан на барабан затягивающей лебедки, а конец леера прикреплен к корпусу БЛА.
Частными существенными признаками изобретения являются следующие.
Аппаратура наблюдения включает в себя цифровой фотоаппарат, выполненный с возможностью видеосъемки, и поворотное устройство, выполненное с возможностью ориентации цифрового фотоаппарата в заданных направлениях, а блок управления выполнен с дополнительными возможностями формирования команд управления цифровым фотоаппаратом и поворотным устройством.
Первый и второй приемопередающие модули выполнены в виде Bluetooth-модулей.
Двигательная установка выполнена на основе электродвигателя.
Задачей настоящего изобретения является создание системы наблюдения за земной поверхностью с использованием БЛА, обладающей возможностями наблюдения под контролем наземного оператора за заданными участками земной поверхности, трансляции получаемой информации на землю для представления оператору, который в любой момент времени имел бы возможность возвратить БЛА на землю.
Обеспечиваемый технический результат достигается благодаря сочетанию в БЛА конструктивных особенностей воздушного змея (затягивающая лебедки, леер) и самолета (двигательная установка, автопилот, аэродинамические рули). Данное конструктивное решение позволяет БЛА оперативно переходить из режима воздушного змея в режим самолета с леером и наоборот. Поэтому предлагаемая система наблюдения за земной поверхностью с БЛА позволяет осуществлять непродолжительные полеты БЛА даже в безветренную погоду и практически неограниченное время держать БЛА в воздухе при достаточно сильном ветре.
Сущность изобретения поясняется на фиг.1 и фиг.2.
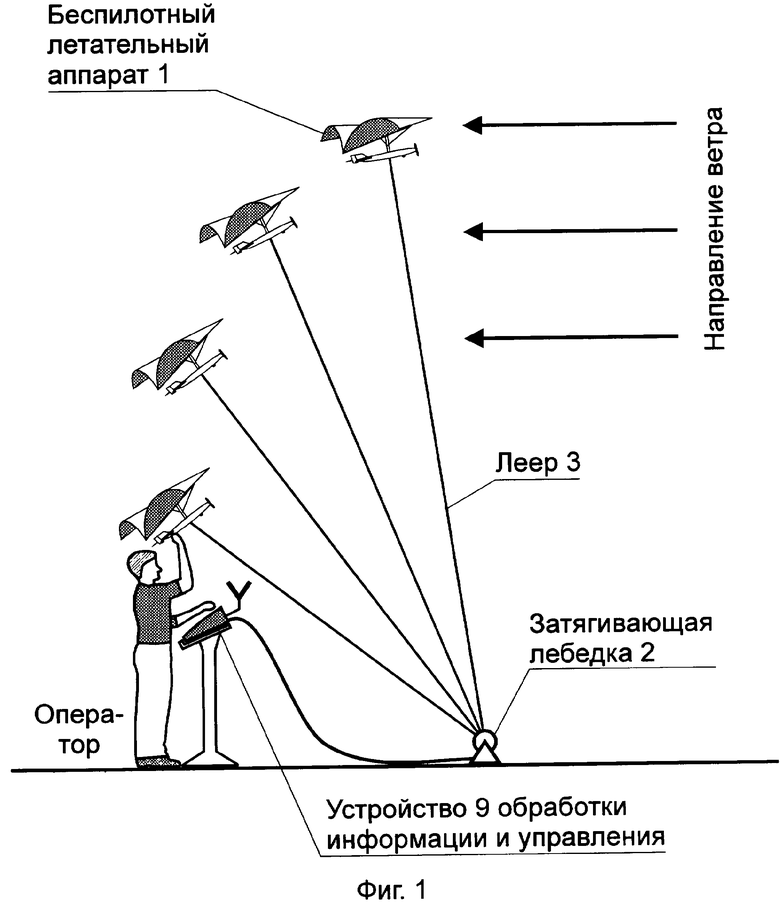
Фиг.1 иллюстрирует процедуру запуска БЛА.
На фиг.2 представлена структурная схема предлагаемой системы наблюдения за земной поверхностью с БЛА.
На рисунках использованы следующие обозначения: 1 - БЛА; 2 - затягивающая лебедка; 3 - леер; 4 - двигательная установка; 5 - аппаратура наблюдения; 6 - контроллер; 7 - первый приемопередающий модуль; 8 - автопилот; 9 - устройство обработки информации и управления; 10 - второй приемопередающий модуль; 11 - блок обработки и отображения информации; 12 - блок управления; 13 - рулевой привод; 14 - аэродинамические рули.
Рассматриваемая система наблюдения за земной поверхностью с БЛА содержит (фиг.1 и фиг.2) установленный на БЛА 1 контроллер 6, связанный с первым приемопередающим модулем 7, с аппаратурой 5 наблюдения и с автопилотом 8. В состав БЛА 1 входит также двигательная установка 4 и рулевой привод 13, подключенные к соответствующим выходам контроллера 6, а также аэродинамические рули 14, соединенные с выходом рулевого привода 13. В состав рассматриваемой системы наблюдения за земной поверхностью с БЛА входят также расположенные на земле устройство 9 обработки информации и управления (носимое или возимое) и затягивающая лебедка 2, на барабан которой намотан леер 3. Устройство 9 обработки информации и управления включает в себя второй приемопередающий модуль 10, выполненный с возможностью обмена информацией по радиоэфиру с первым приемопередающим модулем 7, блок 11 обработки и отображения информации, вход которого подключен к выходу второго приемопередающего модуля 10, и блок 12 управления, первый выход которого подключен ко входу второго приемопередающего модуля 10, а второй выход - к управляющему входу затягивающей лебедки 2. Блок 12 управления выполнен с возможностью формирования на первом выходе команд включения и выключения двигательной установки 4 для перевода БЛА 1 в режим самолета с леером или в режим воздушного змея при полете в условиях, соответственно, отсутствия или наличия ветра.
Аппаратура 5 наблюдения включает в себя цифровой фотоаппарат, выполненный с возможностью видеосъемки, и поворотное устройство, выполненное с возможностью ориентации цифрового фотоаппарата в заданных направлениях. При этом блок 12 управления выполнен с дополнительными возможностями формирования команд управления цифровым фотоаппаратом и поворотным устройством.
Как возможный вариант, первый 7 и второй 10 приемопередающие модули могут быть выполнены в виде Bluetooth-модулей.
Как возможный вариант, двигательная установка 4 может быть выполнена на основе электродвигателя.
За исключением затягивающей лебедки 2 с леером 3, все показанные на фиг.2 функциональные узлы присутствуют в БЛА семейства CyberBug™, серийно выпускаемых фирмой Cyber Defense Systems, доступных на коммерческом рынке и указанных, например, в рекламных материалах на сайте www.proxygen.com.
Для обмена информацией между бортовой аппаратурой БЛА 1 и устройством 9 обработки информации и управления используются модули беспроводной передачи данных (беспроводного доступа), например, Bluetooth-модули, работающие в частотном диапазоне 2,4 ГГц. При нахождении указанных первого 7 и второго 10 приемопередающих модулей в зоне действия друг друга между ними осуществляется обмен данными, в соответствии со стандартом 802.15.1. Такие приемопередающие модули широко применяются для обеспечения беспроводного соединения различных электронных устройств. В предлагаемой системе они используются для обмена информацией между бортовой аппаратурой БЛА 1 и наземным устройством 9 обработки информации и управления. Дальность действия и скорость передачи данных для Bluetooth-модулей первого класса составляют, соответственно, до 100 м и до 3 Мбит/с (Cnews Analytics, 2007). Это позволяет применить указанные Bluetooth-модули в рассматриваемой системе.
Затягивающая лебедка 2 с леером 3 применяется во многих системах, использующих в качестве БЛА воздушный змей, например, в вышеупомянутой системе по свидетельству на полезную модель RU №29281, В64С 31/00 или в системе по патенту US №6286786, В64С 31/06.
Таким образом, все используемые в предлагаемой системе наблюдения за земной поверхностью с БЛА функциональные узлы известны и доступны на коммерческом рынке. Поэтому возможность практической реализации предлагаемой системы не вызывает сомнений.
Рассматриваемая система наблюдения за земной поверхностью с БЛА работает следующим образом.
Запуск БЛА 1 осуществляется одним оператором. Оператор берет в руки БЛА 1 и отходит на расстояние порядка (5-10) м по направлению ветра от места нахождения затягивающей лебедки 2 (фиг.1). После этого, развернув БЛА 1 против ветра, оператор легким толчком руки отпускает его вверх. Далее, регулируя натяжение леера 3 при помощи затягивающей лебедки 2 (вручную или автоматически), оператор поднимает БЛА 1 на нужную высоту. В отличие от самолета, которому при взлете необходимо расходовать собственную энергию, энергия, необходимая для взлета БЛА 1 в режиме воздушного змея, берется из набегающего воздушного потока (ветра). Для нормального взлета и набора высоты БЛА 1 в режиме воздушного змея необходим ветер со скоростью (3-4) м/с.
В штиль или при недостаточной скорости ветра взлет БЛА 1 осуществляется в режиме самолета с леером 3 при использовании двигательной установки 4, выполненной, например, на базе бесколлекторного электродвигателя. Взлет БЛА 1 в этом случае происходит по восходящей спирали с центрированием относительно точки привязки леера 3 к затягивающей лебедке 2. После набора нужной высоты полет БЛА 1 осуществляется по кругу с центрированием относительно точки привязки леера 3 к затягивающей лебедке 2.
При достаточно высокой скорости ветра БЛА 1, входящий в состав рассматриваемой системы наблюдения за земной поверхностью, может находиться в воздухе весьма продолжительное время, которое ограничивается лишь емкостью аккумуляторов, питающих аппаратуру 5 наблюдения. В безветрие добавляются расходы энергии на питание двигательной установки 4. Таким образом, при достаточно сильном ветре БЛА 1 осуществляет полет в режиме воздушного змея, а при отсутствии достаточной силы ветра - в режиме самолета, но в отличие от ближайшего аналога - режим самолета представляет собой не свободный полет, а полет с привязкой к земле посредством леера 3 и затягивающей лебедки 2.
В качестве аппаратуры 5 наблюдения в рассматриваемой системе может использоваться цифровой фотоаппарат, выполненный с возможностью видеосъемки земной поверхности. Входящее в состав аппаратуры 5 наблюдения поворотное устройство обеспечивает необходимую ориентацию цифрового фотоаппарата для получения требуемых кадров изображения. Как правило, съемка осуществляется в панорамном режиме. Примеры результатов подобной съемки приведены, например, на сайте www.scotthaefner.ru.
Получаемые изображения земной поверхности поступают через контроллер 6 на вход первого приемопередающего модуля 7, переносятся на несущую частоту и излучаются в эфир. Если, например, в качестве первого приемопередающего модуля 7 используется Bluetooth-модуль первого класса, то передача осуществляется на частоте 2,4 ГГц, в формате 802.15.1, на расстояние до 100 м. Одновременно с изображениями земной поверхности на землю могут передаваться также данные, получаемые от датчиков автопилота 8, которые подаются на вход первого приемопередающего модуля 7 через контроллер 6.
Информационные сообщения, состоящие из кадров изображения земной поверхности и данных, полученных датчиками автопилота 8, поступают в устройство 9 обработки информации и управления - на вход второго приемопередающего модуля 10.
Из второго приемопередающего модуля 10 кадры изображения и данные от датчиков автопилота 8 поступают в блок 11 обработки и отображения информации, где осуществляется их цифровая обработка в соответствии с известными алгоритмами геоинформационных систем (ГИС-обработка), приведенными, например, на сайте ПК "Геокибернетика" www.geobuilder.ru.
Результатом такой ГИС-обработки является отображение на экране монитора, входящего в состав блока 11 обработки и отображения информации, интересующих оператора кадров изображения земной поверхности с привязкой их к картографической основе (к цифровой модели карты или к отдельным опорным ориентирам, которые хранятся в запоминающем устройстве блока 11 обработки и отображения информации). Кадры изображения отображаются на экране монитора в сопровождении данных, получаемых датчиками автопилота 8.
Таким образом, оператор имеет возможность наблюдать с высоты порядка 100 м за интересующими его участками земной поверхности и находящимися на них объектами. Кроме того, благодаря двухсторонней связи между устройством 9 обработки информации и управления и бортовой аппаратурой БЛА 1, оператор может с земли управлять параметрами полета БЛА 1 и задавать условия наблюдения за земной поверхностью. Для этого в состав устройства 9 обработки информации и управления включен блок 12 управления, который может программным путем и/или вручную - с участием оператора - формировать команды управления:
- затягивающей лебедкой 2;
- бортовой аппаратурой БЛА 1.
Команды управления затягивающей лебедкой 2 могут поступать со второго выхода блока 12 управления на затягивающую лебедку 2 по кабелю, показанному на фиг.1. Эти команды позволяют уменьшать или увеличивать длину леера 3, а также изменять скорость вращения барабана затягивающей лебедки 2.
Команды управления бортовой аппаратурой БЛА 1 с первого выхода блока 12 управления команды поступают на вход второго приемопередающего модуля 10, который передает их по радиоэфиру на борт БЛА 1. Эти команды принимаются первым приемопередающим модулем 7, декодируются в нем и через контроллер 6 передаются в двигательную установку 4, в аппаратуру 5 наблюдения и/или через рулевой привод 13 на аэродинамические рули 14.
Команды, подаваемые на двигательную установку 4, могут включать в себя команды включения/выключения электродвигателя, изменения скорости вращения винта и другие команды.
Команды, подаваемые в аппаратуру 5 наблюдения, могут изменять углы поворота цифрового фотоаппарата для выбора необходимого ракурса наблюдения за земной поверхностью, периодичность кадров и другие параметры наблюдения.
Команды, подаваемые через рулевой привод 13 на аэродинамические рули 14, могут изменять углы наклона крыльев, конфигурацию их поверхности и другие параметры управления движением БЛА 1.
Наряду с измерением ряда параметров движения БЛА 1 установленный на его борту автопилот 8 обеспечивает необходимую стабилизацию положения БЛА 1 в пространстве на заданной высоте, парирование ветровых возмущений, движение по окружности с заранее заданным радиусом и другие аналогичные операции. Воздействия автопилота 8 на двигательную установку 4, на поворотное устройство аппаратуры 5 наблюдения и - через рулевой привод 13 - на аэродинамические рули 14 осуществляются через контроллер 6, который формирует по данным от автопилота 8 необходимые команды управления указанными функциональными узлами.
Таким образом, предлагаемое техническое решение позволяет решить поставленную задачу - создать систему наблюдения за земной поверхностью с использованием БЛА, которая обеспечивала бы возможность наблюдения за заданными участками земной поверхности и передачи получаемой информации на землю под контролем наземного оператора, обладающего возможностью в любой момент возвратить БЛА 1 на землю.
Обеспечиваемый технический результат достигается, благодаря сочетанию в БЛА 1 конструктивных особенностей воздушного змея (затягивающая лебедки, леер) и самолета (двигательная установка, автопилот, аэродинамические рули). Данное конструктивное решение позволяет БЛА 1 оперативно переходить из режима воздушного змея в режим самолета с леером и наоборот. Поэтому предлагаемая система наблюдения за земной поверхностью с БЛА позволяет осуществлять непродолжительные полеты БЛА 1 даже в безветренную погоду и практически неограниченное время держать БЛА 1 в воздухе при достаточно сильном ветре.
| название | год | авторы | номер документа |
|---|---|---|---|
| Беспилотный летательный аппарат самолетного типа для обнаружения пропавшего человека | 2019 |
|
RU2723201C1 |
| СПОСОБ РАЗВЕРТЫВАНИЯ И ВЫСОТНОЙ ПОДВЕСКИ ИНФОРМАЦИОННОЙ СИСТЕМЫ И НЕСУЩИЙ АЭРОДИНАМИЧЕСКИЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2009 |
|
RU2392188C1 |
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ КООРДИНАТ ОБЪЕКТОВ | 2012 |
|
RU2513900C1 |
| УНИФИЦИРОВАННЫЙ БОРТОВОЙ МОДУЛЬ АВИАЦИОННОГО НАБЛЮДЕНИЯ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2021 |
|
RU2794287C1 |
| СИСТЕМА НАБЛЮДЕНИЯ ЗА НАЗЕМНОЙ ОБСТАНОВКОЙ | 2004 |
|
RU2248307C1 |
| АВИАЦИОННАЯ СИСТЕМА ЗОНДИРОВАНИЯ ЗЕМНОЙ ПОВЕРХНОСТИ | 2007 |
|
RU2346852C1 |
| Способ доставки постановщиков помех и беспилотный робототехнический комплекс радиоэлектронной борьбы | 2016 |
|
RU2625206C1 |
| СПОСОБ ПОСАДКИ СВЕРХЛЕГКОГО БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2006 |
|
RU2307047C1 |
| СПОСОБ ПОСАДКИ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА АЭРОДИНАМИЧЕСКОГО ТИПА | 2005 |
|
RU2278801C1 |
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ КООРДИНАТ ОБЪЕКТОВ | 2022 |
|
RU2812755C2 |
Изобретение относится к области малой авиации, а именно к беспилотным летательным аппаратам (БЛА), и может быть использовано для получения фотоснимков земной поверхности с высот порядка 100 м. На БЛА установлен контроллер, связанный с аппаратурой наблюдения, автопилотом и первым приемопередающим модулем. В состав БЛА входит также двигательная установка и рулевой привод, подключенные к соответствующим выходам контроллера. Аэродинамические рули соединены с выходом рулевого привода. Имеется также наземное носимое или возимое устройство обработки информации и управления со вторым приемопередающим модулем, блоком обработки и отображения информации и блоком управления. Второй приемопередающий модуль выполнен с возможностью обмена информацией по радиоэфиру с первым приемопередающим модулем. Вход блока обработки и отображения информации подключен к выходу второго приемопередающего модуля. Первый выход блока управления подключен ко входу второго приемопередающего модуля. Блок управления выполнен с возможностью формирования на первом выходе команд включения и выключения двигательной установки для перевода БЛА в режим самолета или в режим воздушного змея при полете в условиях соответственно отсутствия или наличия ветра. Для осуществления второго из указанных режимов в систему дополнительно введены затягивающая лебедка с леером. Управляющий вход затягивающей лебедки подключен ко второму выходу блока управления, леер намотан на барабан затягивающей лебедки, а конец леера прикреплен к корпусу БЛА. Данная система с БЛА, сочетающим конструктивные особенности воздушного змея и самолета с леером, обладает возможностями наблюдения под контролем наземного оператора за заданными участками земной поверхности и трансляции получаемой информации на землю для представления оператору, который в любой момент времени может возвратить БЛА на землю. 3 з.п. ф-лы, 2 ил.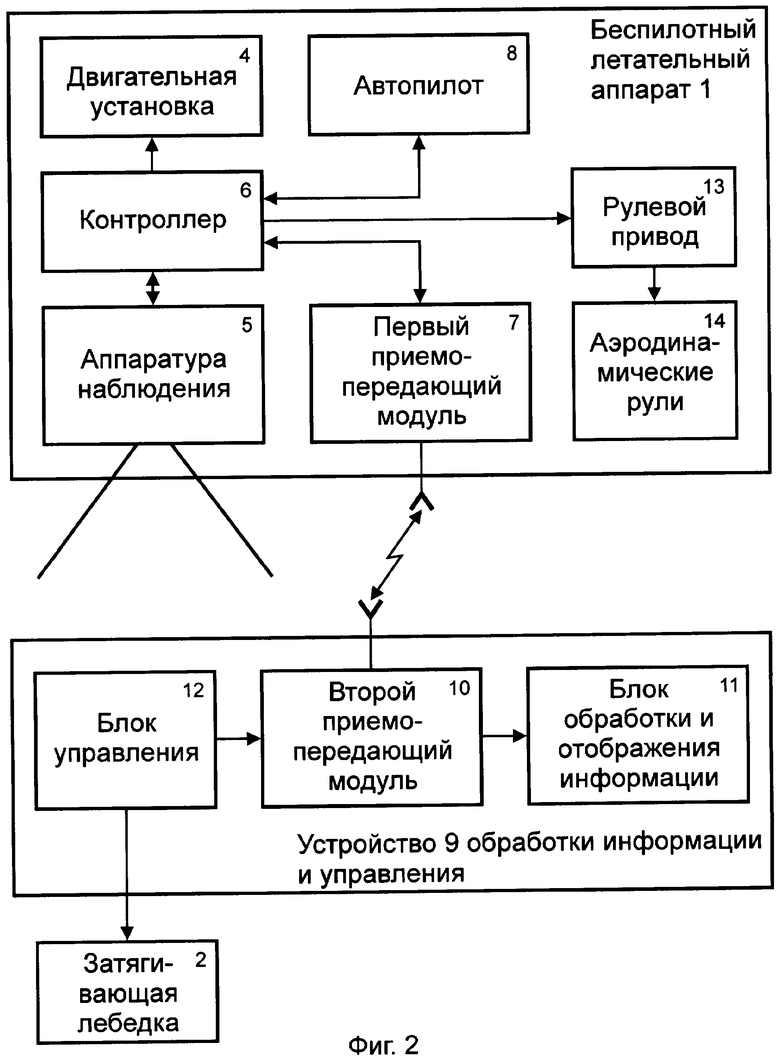
| АВТОНОМНЫЙ ПРИВЯЗНОЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ ДЛЯ ДИСТАНЦИОННОГО НАБЛЮДЕНИЯ ЗА МЕСТНОСТЬЮ | 1998 |
|
RU2159199C2 |
| US 6286786 В1, 11.09.2001 | |||
| Прибор для иллюстрации получения стоячих волн | 1931 |
|
SU29281A1 |
| DE 3621823 А1, 14.01.1988. | |||

