ОБЛАСТЬ ТЕХНИКИ ИЗОБРЕТЕНИЯ
Настоящее изобретение относится к области техники медицинских инструментов и, в частности, к роботизированной хирургической системе.
УРОВЕНЬ ТЕХНИКИ ИЗОБРЕТЕНИЯ
В общих сценариях робот-ассистированной хирургической операции, хирург приводит в действие задающую сторону робота, расположенную удаленно от пациента, и управляет, по схеме копирующего управления, движением хирургических инструментов на ведомой стороне робота в разных направлениях по операционным полям. Задающая сторона может быть, но без ограничения, последовательной гомогенной роботизированной рукой, последовательной гетерогенной роботизированной рукой, параллельной роботизированной рукой, экзоскелетными перчатками и т.п., которые могут управлять положением и ориентацией хирургических инструментов относительно операционных полей.
В общем, на ведомой стороне находятся несколько роботизированных рук, способных удерживать хирургические инструменты и эндоскоп. В данных случаях, очень важно создать хирургу возможность точно понимать результаты взаимодействий хирургических инструментов с тканью пациента. Иначе говоря, необходимо, чтобы хирург получал различимые показания усилий, прилагаемых хирургическими инструментами, которые являются также усилиями, прилагаемыми тканью тела к оконечности данных хирургических инструментов.
Среди роботизированных хирургических систем, система Da Vinci признана одной из наиболее выдающихся систем в мире. Однако, хирургические инструменты в таких системах, как в Китае, так и за рубежом, включая систему Da Vinci, все еще имеют целый ряд недостатков, из которых основными являются следующие недостатки:
1. Некоторые существующие хирургические роботы лишены механизмов тактильной обратной связи, и поэтому хирургические инструменты роботов не могут передавать обратно информацию об их операционной среде и состоянии во время хирургической операции. Следовательно, хирург не может ощутить никакого препятствия снаружи наблюдаемого поля зрения или касания некоторой части тела каким-либо из хирургических инструментов. Это будет существенно влиять на тактильное восприятие применения хирургом и результат операции или даже приводить к неблагоприятному исходу хирургической операции.
2. Хотя некоторые существующие хирургические роботы имеют системы тактильной обратной связи, такие системы ассоциируются с высокой вычислительной и конструктивной сложностью и обычно действуют косвенным способом, при котором применяются дополнительные компоненты или привносятся измерения на передаточных механизмах для вычисления усилий, действующих на хирургические инструменты. Это будет приводить к значительному увеличению массы и конструктивной сложности хирургических инструментов. Один пример такой системы с косвенной тактильной обратной связью представляет собой устройство-троакар для доставки хирургического инструмента, раскрытое в заявке WO2005067804A. Данное устройство включает в себя кольцевой датчик усилия, расположенный на внутренней стенке троакара, канюлю, вставленную в центральное отверстие датчика усилия, и хирургический инструмент, который может проходить по канюле и выступать наружу из дистального конца троакара, и вступать во взаимодействие с целевым операционным полем. Датчик усилия, расположенный между троакаром и канюлей, предназначен для косвенного измерения усилия, прилагаемого хирургическим инструментом к целевому полю. В одном варианте осуществления данного устройства, другой кольцевой датчик усилия располагается в месте, где проксимальный конец хирургического инструмента соединен с роботизированной рукой, чтобы облегчать измерение для тактильной обратной связи. Данное устройство имеет, в общем, сложную конструкцию и требует сложного алгоритма тактильной обратной связи.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Целью некоторых вариантов осуществления настоящего изобретения является решение, по меньшей мере, одной из проблем обычных механизмов для измерения усилия контакта на оконечности хирургического инструмента, например, проблемы конструктивной сложности, вычислительной сложности и низкой точности, посредством обеспечения роботизированной хирургической системы.
С данной целью, некоторые варианты осуществления настоящего изобретения раскрывают роботизированную хирургическую систему, содержащую ведомый узел и вычислительный блок, при этом ведомый узел содержит роботизированную руку, хирургический инструмент, канюлю и сенсорный элемент, причем роботизированная рука выполнена с возможностью приведения хирургического инструмента в движение для поворота вокруг удаленного центра движения, канюля соединена с возможностью разъема с оконечностью роботизированной руки, и ось канюли продолжается через удаленный центр движения, хирургический инструмент соединен с возможностью разъема с оконечностью роботизированной руки и продолжается дистально по канюле, сенсорный элемент располагается на канюле и выполнен с возможностью измерения аксиальной деформации канюли; вычислительный блок выполнен с возможностью определения, по принципу равновесия вращающих моментов, радиального усилия, действующего на оконечность хирургического инструмента, исходя из усилия, действующего на канюлю, измеренного и определенного сенсорным элементом.
В возможном варианте, на внутренней стенке канюли обеспечен выступ, и выступ выполнен с возможностью образования точечного контакта, при приведении в контакт с хирургическим инструментом, при этом канюля содержит базовую точку, расположенную в удаленном центре движения, и как выступ, так и сенсорный элемент расположены с одной стороны от базовой точки, дальше от оконечности роботизированной руки, и причем вычислительный блок выполнен с возможностью определения радиального усилия, действующего на оконечность хирургического инструмента, исходя из усилия, действующего на канюлю в месте точечного контакта, измеренного и определенного сенсорным элементом.
В возможном варианте, на внутренней стенке канюли обеспечен один выступ; или по внутренней стенке канюли обеспечено и симметрично распределено множество выступов.
В возможном варианте, сенсорный элемент располагается ближе к оконечности роботизированной руки, чем располагается выступ.
В возможном варианте, множество сенсорных элементов симметрично распределено на внутренней поверхности и/или внешней поверхности канюли.
В возможном варианте, канюля содержит оправу, выполненную с возможностью разъемного соединения с оконечностью роботизированной руки.
В возможном варианте, канюля выполнена с возможностью расположения коаксиально или по посадке с зазором с хирургическим инструментом.
В возможном варианте, хирургический инструмент содержит силовой модуль, инструментальный стержень, первую характеристическую точку, вторую характеристическую точку и третью характеристическую точку; при этом силовой модуль соединен с проксимальным концом инструментального стержня, инструментальный стержень выполнен с возможностью образования точечного контакта, при приведении в контакт с канюлей, первая характеристическая точка задана в месте, в котором инструментальный стержень соединяется с силовым модулем, вторая характеристическая точка задана в месте инструментального стержня, соответствующем оконечности канюли, третья характеристическая точка задана на оконечности хирургического инструмента, и причем радиальное усилие, действующее на третью характеристическую точку, доступно для определения вычислительным блоком, исходя из усилия, действующего на вторую характеристическую точку, расстояния между первой характеристической точкой и второй характеристической точкой и расстояния между первой характеристической точкой и третьей характеристической точкой.
В возможном варианте, хирургический инструмент содержит силовой модуль, инструментальный стержень, первую характеристическую точку, вторую характеристическую точку и третью характеристическую точку; при этом силовой модуль соединен с проксимальным концом инструментального стержня, инструментальный стержень выполнен с возможностью образования точечного контакта, при приведении в контакт с выступом, первая характеристическая точка задана в месте, в котором инструментальный стержень соединяется с силовым модулем, вторая характеристическая точка задана в месте, в котором выступ может контактировать с инструментальным стержнем, третья характеристическая точка задана на оконечности хирургического инструмента, и причем радиальное усилие, действующее на третью характеристическую точку, доступно для определения вычислительным блоком, исходя из усилия, действующего на вторую характеристическую точку, расстояния между первой характеристической точкой и второй характеристической точкой и расстояния между первой характеристической точкой и третьей характеристической точкой.
В возможном варианте, расстояние между первой характеристической точкой и второй характеристической точкой получают, исходя из начального значения расстояния между первой характеристической точкой и второй характеристической точкой, определенного во время инициализации роботизированной хирургической системы, и смещения хирургического инструмента вдоль оси канюли от начального положения хирургического инструмента, определенного во время инициализации роботизированной хирургической системы.
В возможном варианте, хирургический инструмент содержит силовой модуль и передаточный механизм, выполненный с возможностью передачи выходного усилия от силового модуля к оконечности хирургического инструмента, при этом силовой модуль содержит электродвигатель аксиального привода, выполненный с возможностью приведения хирургического инструмента в движение в аксиальном направлении, и причем вычислительный блок выполнен с возможностью определения аксиального усилия, действующего на оконечность хирургического инструмента, исходя из выходного усилия электродвигателя аксиального привода и передаточного отношения передаточного механизма.
В возможном варианте, выходное усилие электродвигателя аксиального привода доступно для вычисления по электрическому току, протекающему через электродвигатель аксиального привода, или измерения датчиком, расположенным на выходном валу электродвигателя аксиального привода.
В возможном варианте, на внешней поверхности хирургического инструмента обеспечено покрытие для уменьшения трения между хирургическим инструментом и канюлей.
В возможном варианте, роботизированная хирургическая система дополнительно содержит ведущий узел, содержащий индикатор усилия, выполненный с возможностью обеспечения восприятия радиального усилия, действующего на оконечность хирургического инструмента.
В возможном варианте, индикатор усилия является ведущим манипулятором, снабженным электродвигателем, коммуникативно соединенным с вычислительным блоком, или индикатор усилия является системой визуализации.
В общем, некоторые варианты осуществления настоящего изобретения предлагают роботизированную хирургическую систему, включающую в себя ведомый узел и вычислительный блок. Ведомый узел включает в себя роботизированную руку, хирургический инструмент, канюлю и сенсорный элемент. Сенсорный элемент располагается на канюле и выполнен с возможностью измерения аксиальной деформации канюли, и вычислительный блок выполнен с возможностью определения усилия контакта, действующего на канюлю, по измеренной аксиальной деформации, а также радиального усилия, действующего на оконечность хирургического инструмента, в соответствии с усилием контакта. В других вариантах осуществления, на внутренней стенке канюли располагается выступ, который выполнен с возможностью прихода в точечный контакт с хирургическим инструментом, и вычислительный блок выполнен с возможностью определения радиального усилия, действующего на оконечность хирургического инструмента, исходя из усилия точечного контакта, прилагаемого к канюле, в соответствии с аксиальной деформацией, измеренной сенсорным элементом. Когда на оконечность хирургического инструмента действует внешнее усилие, хирургический инструмент будет деформироваться и приходить в контакт с канюлей. В ответ, канюля будет воздействовать реакцией опоры на участок контакта с хирургическим инструментом. Момент реакции опоры уравновешивается моментом радиальной компоненты (т.е. вышеупомянутого радиального усилия) внешнего усилия, действующего на оконечность хирургического инструмента. Следовательно, радиальное усилие на оконечности хирургического инструмента может точно и однозначно определяться измерением усилия контакта между канюлей и хирургическим инструментом, с одновременным исключением ошибок измерения, которые могут возникать из-за изменения конструкции оконечности хирургического инструмента. В частности, поскольку канюля снабжена выступом, который может быть приведен в точечный контакт с хирургическим инструментом, то радиальное усилие, действующее на оконечность хирургического инструмента, может определяться еще точнее посредством измерения усилия контакта между выступом и хирургическим инструментом.
По сравнению с обычными решениями, использующими мощность двигателя для вычисления усилия, действующего на оконечность хирургического инструмента, роботизированная хирургическая система по настоящему изобретению имеет преимущество благодаря как более простому пути передачи усилия, так и более высокой точности измерения радиального усилия. Более того, радиальное усилие, действующее на оконечность хирургического инструмента, можно получать более простым путем, без потребности в дополнительных компонентах, что обеспечивает меньшую конструктивную сложность хирургического инструмента и облегчает его сборку. Кроме того, поскольку в хирургическом инструменте требуются лишь небольшие изменения, то различные существующие хирургические инструменты можно соответственно применять в роботизированной хирургической системе, предлагаемой настоящим изобретением.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
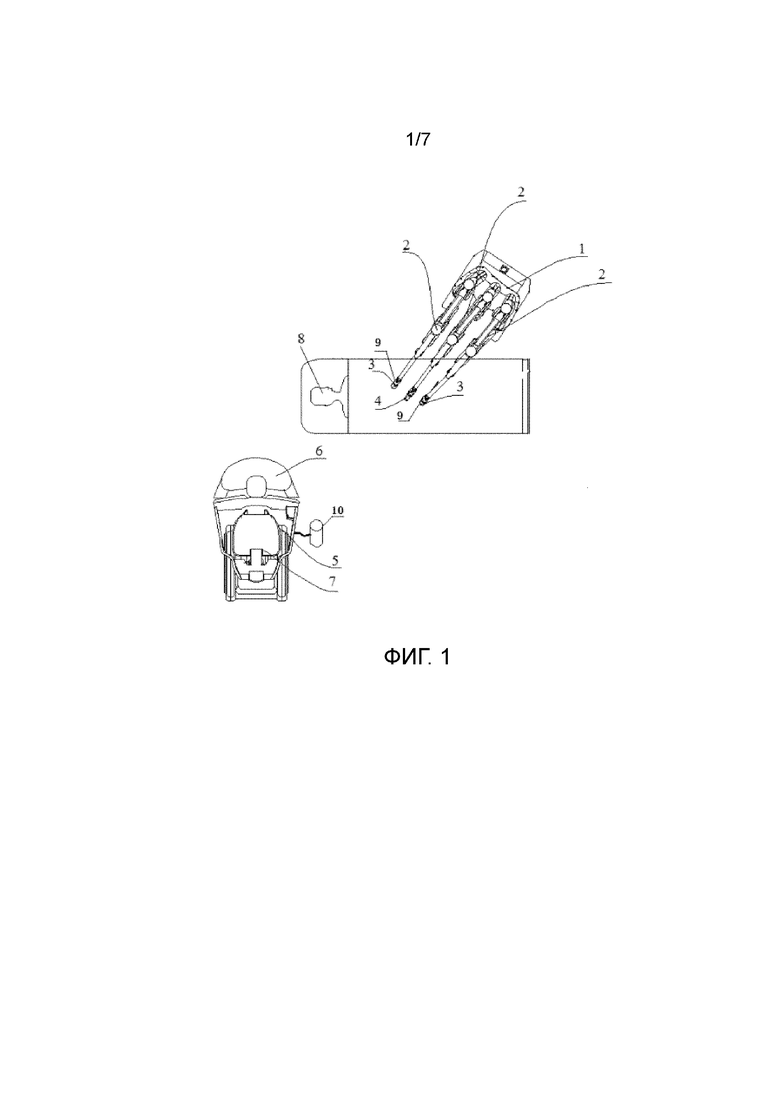
Фиг. 1 - конструктивная схема роботизированной хирургической системы в соответствии с вариантом осуществления изобретения.
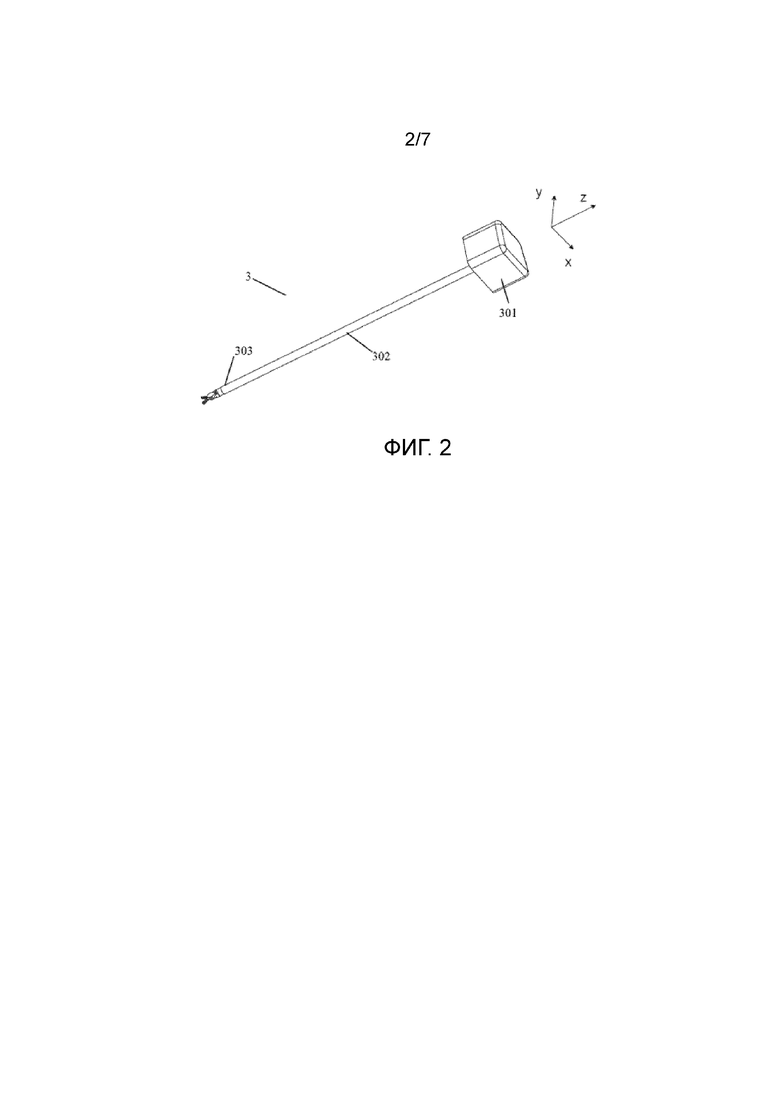
Фиг. 2 - конструктивная схема хирургического инструмента в соответствии с вариантом осуществления изобретения.
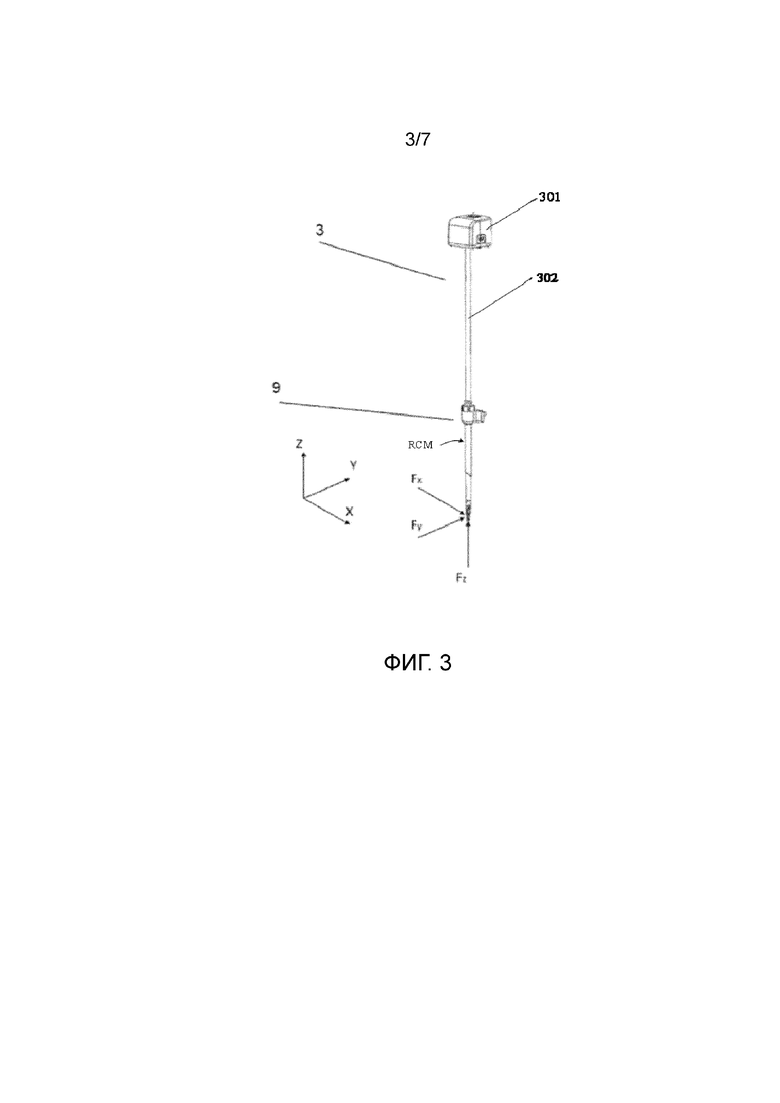
Фиг. 3 - схематическое изображение усилий, прилагаемых тканью человека к оконечности хирургического инструмента, который вставлен по канюле, в соответствии с вариантом осуществления изобретения.
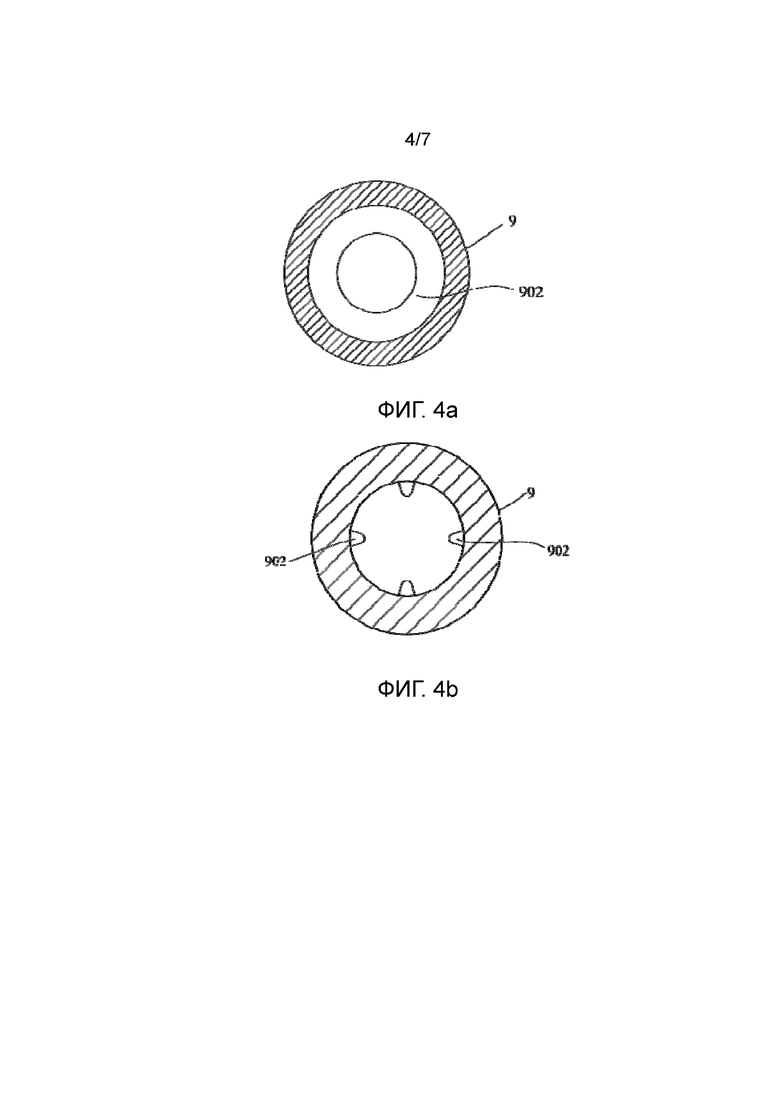
Фиг. 4a - поперечное сечение канюли в соответствии с вариантом осуществления изобретения.
Фиг. 4b - поперечное сечение канюли в соответствии с другим вариантом осуществления изобретения.
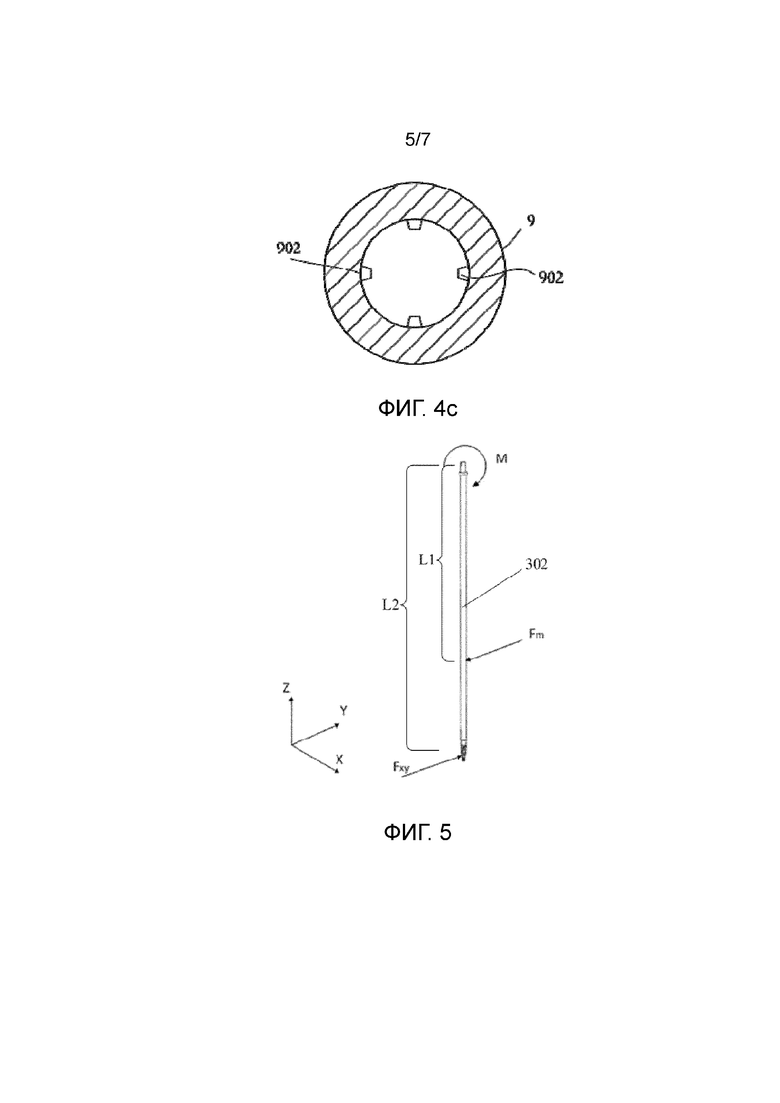
Фиг. 4c - поперечное сечение канюли в соответствии с еще одним вариантом осуществления изобретения.
Фиг. 5 - схематическое изображение усилий, прилагаемых к хирургическому инструменту, в соответствии с вариантом осуществления изобретения.
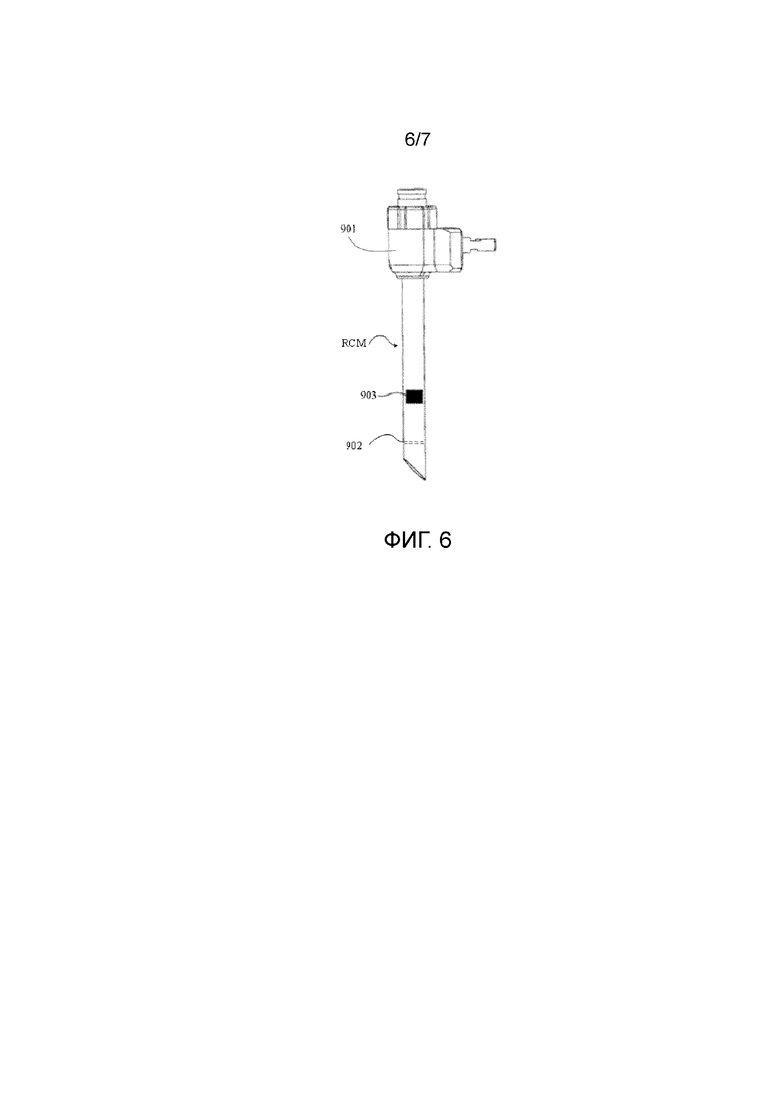
Фиг. 6 - конструктивная схема канюли в соответствии с вариантом осуществления изобретения.
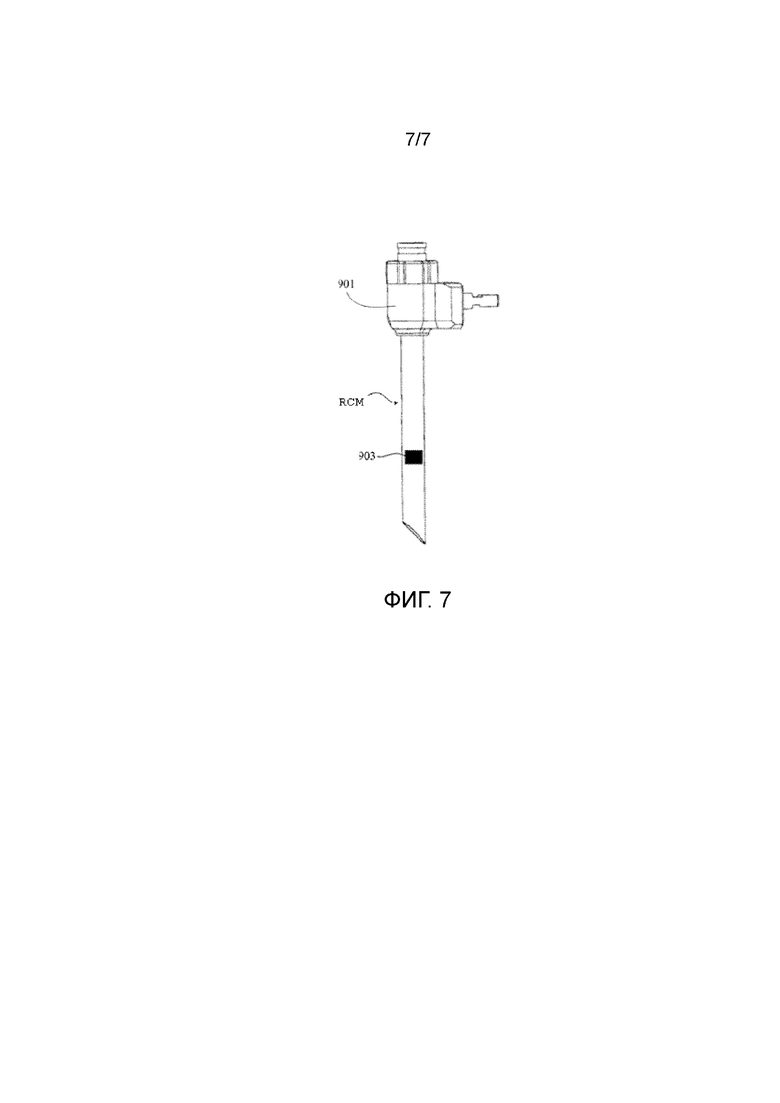
Фиг. 7 - конструктивная схема канюли в соответствии с другим вариантом осуществления изобретения.
На данных чертежах
1 - стойка для пациента; 2 - роботизированная рука; 3 - хирургический инструмент; 301 - силовой модуль; 302 - инструментальный стержень; 303 - исполнительный орган; 4 - эндоскоп; 5 - система формирования стереоизображений; 6 - ведущий манипулятор; 7 - подлокотник; 8 - пациент; 10 - вычислительный блок;
9 - канюля; 901 - оправа; 902 - выступ; и 903 - сенсорный элемент.
ПОДРОБНОЕ ОПИСАНИЕ
Вышеприведенные и другие цели, признаки и преимущества настоящего изобретения станут более очевидными из последующего подробного описания предлагаемой роботизированной хирургической системой, которое следует читать в связи с фиг. 1-7. Следует отметить, что фигуры являются очень упрощенными и могут быть вычерчены не в масштабе, и предназначены исключительно для поддержки простого и ясного объяснения раскрытых вариантов осуществления. В настоящем описании, определение «ведомый конец», «оконечность» или «дистальный конец» относится к концу, находящемуся дальше от оператора и ближе к пациенту, а определение «ведущий», «ведущий конец» или «проксимальный» относится к концу, находящемуся ближе к оператору и дальше от пациента.
Фиг. 1 является конструктивной схемой роботизированной хирургической система в соответствии с вариантом осуществления изобретения. Роботизированная хирургическая система включает в себя ведомый узел, включающий в себя стойку 1 для пациента, роботизированную руку 2, хирургический инструмент 3, эндоскоп 4 и канюлю 9. В качестве основы ведомого узла в целом, стойка 1 для пациента служит опорой для всех механических механизмов. Кроме того, стойка 1 для пациента допускает перемещение по полу, чтобы обеспечивать подведение или отведение ведомого узла до/от пациента 8.
Роботизированная рука 2 с несколькими степенями свободы смонтирована на стойке 1 для пациента и выполнена с возможностью приведения хирургического инструмента 3 в движение для поворота вокруг удаленного центра движения (RCM). Когда стойка 1 для пациента перемещается в окрестность пациента 8, роботизированную руку 2 можно отрегулировать так, что хирургический инструмент 3 достигает предварительно заданного целевого операционного поля. То есть, RCM располагают около операционного поля посредством регулировки как стойки 1 для пациента, так и роботизированной руки 2. Хирургический инструмент 3 устанавливают на оконечности роботизированной руки 2, либо жестко, либо подвижно. В качестве исполнительного органа ведомого узла, хирургический инструмент 3 войдет, в итоге, в тело пациента в операционное поле, чтобы обработать патологическое изменение in vivo. На протяжении всей хирургической операции, хирургический инструмент 3 будет перемещаться по нескольким степеням свободы вокруг RCM, и, чтобы избежать причинения повреждения поверхностной ткани тела перемещениями хирургического инструмента 3 и создать герметичную среду внутри тела, между хирургическим инструментом 3 и упомянутой поверхностной тканью располагается канюля 9. Канюля 9 соединена с возможностью разъема с оконечностью роботизированной руки 2 и задает ось, проходящую через RCM. Один конец хирургического инструмента 3 соединен с возможностью разъема с оконечностью роботизированной руки 2, и другой конец вставляется по канюле 9 и в дистальном направлении в тело пациента, чтобы достигать патологического изменения. Следовательно, хирургический инструмент 3 может перемещаться синхронно с канюлей 9 вокруг RCM, а также способен выполнять перемещение вдоль и/или поворот вокруг его оси внутри канюли 9.
Эндоскоп 4 установлен на оконечность другой роботизированной руки 2, отличной от той, на которой установлен хирургический инструмент 3, и выполнен с возможностью сбора визуальной информации об операционной среде. Визуальная информация может включать в себя, но без ограничения, информацию о ткани около патологического изменения и информацию об установке и положении хирургического инструмента 3. При установке на роботизированной руке 2, эндоскоп 4 может быть коммуникативно соединен с ведущим узлом, как подробно описано ниже, чтобы допускать отображение в реальном времени информации об операционной среде, собранной эндоскопом. Эндоскоп 4 может быть трехмерным или нет, что не ограничивается настоящим изобретением.
Как показано на фиг. 1, роботизированная хирургическая система может дополнительно включать в себя ведущий узел, включающий в себя систему 5 визуализации, ведущий манипулятор 6 и подлокотник 7. В течение хирургической операции, при отображении информации из эндоскопа 4 посредством системы 5 визуализации, хирург может контролировать движение хирургического инструмента 3 в реальном времени и соответственно управлять последующим перемещением хирургического инструмента 3 путем манипуляции ведущим манипулятором 6. Хирург может сидеть за хирургической консолью и, с помощью системы 5 визуализации, наблюдать положение и движение оконечности хирургического инструмента внутри тела пациента. На основании наблюдений, хирург может управлять последующим перемещением оконечности путем манипуляции ведущим манипулятором 6, что обеспечивает возможность минимально инвазивной операции. В результате манипуляции хирурга ведущим манипулятором 6, хирургический инструмент 3 может выполнять перемещения в многомерном пространстве, которые требуются при хирургической операции, например, качание, поворот вокруг вертикальной оси, вращение, открывание и закрывание. Подлокотник 7 может служить опорой для руки хирурга, чтобы хирургу было удобнее, когда хирургическая операция продолжается длительное время. Кроме того, подлокотник 7 можно приподнимать и опускать соответственно различным требованиям разных хирургов.
Роботизированная хирургическая система дополнительно включает в себя вычислительный блок 10, коммуникативно соединенный как с ведущим, так и ведомым узлами, например, посредством проводных или беспроводных соединений. Вычислительный блок 10 выполняет, на основе стратегии управления, обработку данных датчика и вычисление различных данных, необходимых при управлении. Вычислительный блок 10 может определять усилие, действующее на канюлю 9, по данным, передаваемым сенсорным элементом 903, (например, данным деформации и напряжения) и, следовательно, определять усилие, действующее на оконечность хирургического инструмента 3, и затем передавать информацию об усилии на оконечности хирургического инструмента 3, в индикатор усилия ведущего узла, и поэтому можно иметь представление об усилии на оконечности хирургического инструмента 3. Индикатор усилия может быть системой 5 визуализации, которая может отображать величину и направление усилия на оконечности хирургического инструмента 3.
В качестве альтернативы, индикатор усилия может быть ведущим манипулятором 6, оснащенным электродвигателем. В то время, когда хирург управляет системой, вычислительный блок 10 может управлять электродвигателем ведущего манипулятора 6 на основании информации об усилии на оконечности хирургического инструмента 3 и может производить усилие, действующее на хирурга. Очевидно, что управление, выполняемое по линии от ведущего манипулятора 6 к хирургическому инструменту 3, является основой контура копирующего управления в роботизированной хирургической система. Для улучшения имитации фактических условий хирургической операции, т.е. имитации усилия, действующего на хирургический инструмент 3 во время операции, желательно, чтобы хирургический инструмент 3 был способен передавать по каналу обратной связи любое усилие, действующее на него, в ведущий манипулятор 6, т.е. чтобы хирургический инструмент 3 был снабжен возможностями тактильной обратной связи. После того, как усилие, действующее на канюлю 9, определяется по данным, измеренным сенсорным элементом 903, (например, данным деформации и напряжения), и, соответственно, усилие, действующее на оконечность хирургического инструмента 3 определяется по усилию на канюле 9, вычислительный блок 10 может выдавать команду на создание вращающего момента в электродвигатель ведущего манипулятора 6, чтобы дать возможность оператору воспринимать усилие, действующее на оконечность хирургического инструмента 3. В более предпочтительно варианте, ведущий манипулятор 6 может быть снабжен вибратором. В данном случае, когда усилие на оконечности хирургического инструмента 3, которое определяется по данным, измеренным сенсорным элементом 903, (например, данным деформации и напряжения), превышает предварительно установленный порог, вычислительный блок 10 может выдать команду на создание вибрации в вибратор ведущего манипулятора 6, для извещения оператора об избыточном усилии на оконечности хирургического инструмента 3.
Роботизированная хирургическая система в соответствии с данным вариантом осуществления способна измерять радиальное усилие на оконечности хирургического инструмента 3, т.е. усилие, прилагаемое вдоль направления, перпендикулярного оси хирургического инструмента 3.
Фиг. 2 является конструктивной схемой хирургического инструмента в соответствии с вариантом осуществления настоящего изобретения. Как показано, хирургический инструмент 3 включает в себя силовой модуль 301, инструментальный стержень 302, механизм передачи усилия и исполнительный орган 303. Механизм передачи усилия может, например, использовать тросиковую передачу и вмещаться в инструментальный стержень 302, и соединяться как с силовым модулем 301, так и с исполнительным органом 303. Силовой модуль 301 расположен на ведущем конце инструментального стержня 302 (т.е. конце, находящемся ближе к оператору), тогда как исполнительный орган 303 расположен на оконечности инструментального стержня 302 (т.е. конце, находящемся дальше от оператора). Силовой модуль 301 выполнен с возможностью обеспечения приводного усилия, которое передается механизмом передачи усилия на исполнительный орган 303, что позволяет исполнительному органу 303 выполнять многомерное поворотное движение, открывающее/закрывающее действие и т.д. Исполнительный орган 303 выполнен с возможностью выполнения таких действий, как разрезание, зондирование и сдавливание, на патологическом изменении пациента. Настоящее изобретение не ограничено никаким конкретным типом исполнительного органа 303, так как он может быть ножницами, щипцами, зондом или чем-то подобным.
Кроме того, для облегчения обнаружения, для хирургического инструмента 3 может быть задана координатная система. Данная координатная система не ограничена показанной прямоугольной координатной системой, но, в качестве альтернативы, может быть цилиндрической координатной системой, полярной координатной системой или подобной координатной системой. В случае прямоугольной координатной системы, например, показанной на фиг. 2 и 3, координатная система установлена тремя осями, которыми являются X-ось, Y-ось и Z-ось, где Z-ось продолжается вдоль оси инструментального стержня 302, X-ось перпендикулярна оси инструментального стержня 302, и Y-сь задана по правилу правой руки. При реальной хирургической операции, оконечность хирургического инструмента 3 (т.е. конца, оснащенного исполнительным органом 303) будет взаимодействовать с тканью пациента, обычно, посредством приложения к ней усилий по трем осям. В ответ, в соответствии с третьим законом Ньютона, оконечность хирургического инструмента 3 будет испытывать действие сил реакции, которые равны по величине, но противоположны по направлению усилию, действующему по трем осям, при этом силы реакции по X- и Y-осям могут быть получены сенсорным элементом 903 и вычислительным блоком 10. Это будет подробнее описано в дальнейшем.
В настоящем варианте осуществления, силовой модуль 301 может быть соединен с проксимальным концом инструментального стержня 302, и инструментальный стержень 302 вмещается в канюлю 9. В предпочтительном варианте, инструментальный стержень 302 может быть выполнен с возможностью прихода в точечный контакт с канюлей 9. Повышенную точность измерения радиального усилия на оконечности хирургического инструмента можно получать измерением усилия в точке контакта между канюлей 9 и хирургическим инструментом 3.
Фиг. 6 является конструктивной схемой канюли (с присутствующим в ней выступом 902, показанным штриховыми линиями) в соответствии с вариантом осуществления настоящего изобретения. Как показано на фиг. 6, канюля 9 может включать в себя оправу 901, выполненную с возможностью разъемного соединения с оконечностью роботизированной руки 2. Канюля 9 может также включать в себя выступ 902, выступающий от внутренней стенки канюли 9. Сенсорный элемент 903 может быть закреплен на канюле 9. Кроме того, канюля 9 может дополнительно включать в себя базовую точку (не показанную, зафиксированную в положении относительно оправу 901), расположенную в RCM. Как выступ 902, так и сенсорный элемент 903 могут располагаться со стороны базовой точки, дальше от оправы 901 (т.е. с ее стороны, находящейся дальше от оконечности роботизированной руки), и выступ 902 может располагаться еще дальше, чем сенсорный элемент 903, от оправы 901, т.е. от оконечности роботизированной руки.
Во время сборки, инструментальный стержень 302 можно вставить по канюле 9, в которой выступ 902 выполнен с возможностью прихода в точечный контакт с инструментальным стержнем 302. Инструментальный стержень 302 предпочтительно выполнен с возможностью расположения коаксиально или по посадке с зазором с канюлей 9. Сенсорный элемент 903 может быть прикреплен либо к внутренней поверхности, либо к внешней поверхности канюли 9. Кроме того, конец канюли 9, удаленный от оправы 901 (т.е. конец с той же стороны, с которой находится выступ 902, относительно базовой точки) может быть заострен и способен прокалывать объект с целью расширения функций канюли.
В варианте осуществления может быть обеспечен только один выступ 902, как показано на фиг. 4a, в форме кольца. В других вариантах осуществления может быть обеспечено множество таких выступов 902, например, четыре выступа 902, как показано на фиг. 4b и 4c. Выступы 902 могут быть распределены, предпочтительно, симметрично. Однако, настоящее изобретение не ограничено никаким конкретным числом выступов 902.
Изобретение также не ограничено никакой конкретной формой выступа(ов) 902, пока обеспечивается, что инструментальный стержень 302 может приходить в точечный контакт с канюлей 9. Именно по данной причине, ширина каждого выступа 902 вдоль окружного направления инструментального стержня 302 должна быть выполнена как можно меньшей. Как показано на фиг. 4b, в одном варианте осуществления, точечный контакт может происходить между криволинейной поверхностью выступов 902 и внешней поверхностью инструментального стержня 302. В качестве альтернативы, как показано на фиг. 4c, точечный контакт может возникать между плоскими поверхностями выступов 902 и внешней поверхностью инструментального стержня 302, который имеет форму круглого стержня.
Кроме того, для обеспечения более точного измерения аксиальной деформации в канюле 9, сенсорный элемент 903 предпочтительно располагают ближе к оправе 901 (т.е. ближе к оконечности роботизированной руки), чем расположен(ы) выступ(ы) 902. Например, сенсорный элемент 903 располагается на участке канюли между базовой точкой и выступом(ами) 902 (как показано на фиг. 6). В предпочтительном варианте может быть обеспечено множество (например, три или четыре) сенсорных элементов 903. В более предпочтительном варианте, данные сенсорные элементы 903 могут быть распределены симметрично. В настоящем варианте осуществления могут быть обеспечены четыре сенсорных элемента 903, из которых два располагаются вдоль X-оси и симметрично один другому относительно Y-оси, и два других располагаются вдоль Y-оси и симметрично один другому относительно X-оси. Примеры устройств, которые можно использовать как сенсорные элементы 903, могут включать в себя, но без ограничения, пленочные тензодатчики, полупроводниковые резистивные тензодатчики, пьезоэлектрические датчики, пьезоэлектрические датчики давления и т.д.
Фиг. 3 схематически изображает силы реакций, прилагаемых тканью человека к оконечности хирургического инструмента, который вставлен по канюле, в соответствии с вариантом осуществления изобретения. Как показано, при определении направления от оконечности инструментального стержня 302 до его ведущего конца в качестве положительного (+) направления Z, оконечность хирургического инструмента 3 может воспринимать усилие Fx в направлении +X, усилие Fy в направлении +Y и усилие Fz в направлении +Z, и вычислительный блок 10 выполнен с возможностью определения радиальных усилий Fx и Fy или их равнодействующего усилия Fxy.
Под воздействием усилий, действующих на оконечность хирургического инструмента 3 в трех направлениях, инструментальный стержень 302 может деформироваться и приходить в контакт с выступом 902 на канюле 9, с приложением к нему усилия контакта, которое может измеряться сенсорным элементом 903 на канюле 9. Кроме того, на основании зависимости между силой реакции, прилагаемой канюлей 9 к инструментальному стержню 302, и радиальным(и) усилием(ями) на оконечности хирургического инструмента, вычислительным блоком 10 могут быть вычислены радиальное(ые) усилие(я) (Fx и Fy, или Fxy). В частности, под воздействием усилий на оконечности хирургического инструмента 3, инструментальный стержень 302 может деформироваться и прекращать деформироваться дальше, при приходе в точечный контакт с выступом 902. Кроме того, сенсорный элемент 903 будет растягиваться или сжиматься из-за аксиальной деформации канюли 9 и, следовательно, измерять усилие контакта, прилагаемого инструментальным стержнем 302 к канюле 9, по которому может определяться сила Fm реакции канюли 9 (которая является равнодействующим усилием компоненты Fmx вдоль X-оси и компоненты Fmy вдоль Y-оси).
Вышеупомянутую зависимость можно математически смоделировать с использованием длин от первой характеристической точки, заданной на проксимальном конце инструментального стержня 302 (т.е. там, где он соединен с силовым модулем 301), соответственно, до второй характеристической точки, заданной в таком месте инструментального стержня 302, в котором он может контактировать с выступом 902, и третьей характеристической точки, заданной на оконечности хирургического инструмента 3. Как показано на фиг. 5, как длина L1 от первой характеристической точки до второй характеристической точки, так и длина L2 от первой характеристической точки до третьей характеристической точки могут быть известны заранее. Например, длину L2 можно измерить заранее. Однако, поскольку длина L1 будет изменяться при перемещении хирургического инструмента 3, ее нельзя измерить заранее. Тем не менее, начальное значение L1s длины L1 можно получить во время инициализации хирургического робота. Телескопическое соединение в роботизированной руке 2 приводит хирургический инструмент 3 в движение относительно канюли 9 вдоль ее оси, и датчик смещения на телескопическом соединении может измерять в реальном времени смещение ΔL хирургического инструмента 3 от начального положения. По существу, длину L1 можно определять в реальном времени в виде L1=L1s+ΔL.
Фиг. 5 схематически изображает усилия, действующие на хирургический инструмент, в соответствии с вариантом осуществления изобретения. Как показано, момент M относительно первой характеристической точки на инструментальном стержне 302 должен быть нулевым равнодействующим:
(1) момента радиального усилия Fxy, действующего на третью характеристическую точку относительно первой характеристической точки, где радиальное усилие Fxy является равнодействующей усилий Fx по X-оси и Fy по Y-оси;
(2) момента (равнодействующей) силы Fm реакции, действующей на вторую характеристическую точку относительно первой характеристической точки; и
(3) опорного момента относительно первой характеристической точки.
На практике, ввиду взаимодействия между канюлей 9 и инструментальным стержнем 302, а также соединения между силовым модулем 301 и инструментальным стержнем 302, опорный момент, прилагаемый силовым модулем 301 к инструментальному стержню 302, можно не принимать в расчет. Кроме того, поскольку Fxy и Fm перпендикулярны оси инструментального стержня 302, соответственно, то момент радиального усилия Fxy относительно первой характеристической точки, FxyL2, является равным и противоположным моменту усилия контакта Fm относительно первой характеристической точки, FmL1. То есть, FxyL2+FmL1=0, в соответствии с чем радиальное усилие Fxy, действующее на оконечность, можно вычислить по известным параметрам L1 и L2, и Fm, величину и направление которой можно измерить сенсорным элементом 903. Иначе говоря, при условии, что момент FxyL2, который является произведением радиального усилия Fxy и L2, равен по величине и противоположен по направлению моменту FmL1, который является произведением силы Fm реакции и L1, то радиальное усилие Fxy можно определить из уравнения:
 ,
,
где знак минус означает, что направление усилия противоположно направлению силы Fm реакции.
Усилие Fz, действующее на оконечность хирургического инструмента 3 по Z-оси (т.е. в аксиальном направлении), может определяться иначе. В одном варианте осуществления, силовой модуль 301 может предпочтительно включать в себя электродвигатель аксиального привода для приведения хирургического инструмента 3 в движение в аксиальном направлении, и вычислительный блок 10 может быть выполнен с возможностью определения аксиального усилия Fz на оконечности хирургического инструмента 3, исходя из выходного усилия электродвигателя аксиального привода и передаточного отношения передаточного механизма. В данном случае, выходное усилие электродвигателя аксиального привода может быть вычислено по току, протекающему в электродвигателе или непосредственно измерено датчиком, расположенном на выходном валу электродвигателя.
Для исключения помех сигналу, возникающих вследствие трения скольжения, вызываемого скольжением инструментального стержня 302 в канюле 9, по внешней поверхности инструментального стержня 302, предпочтительно, можно обеспечить покрытие, способное снижать трение между инструментальным стержнем 302 и выступом 902. Например, покрытие может быть тефлоновым покрытием, которое может исключать нежелательные помехи сигнала, возникающие вследствие трения скольжения, и обеспечивать достаточную точность измерения аксиального усилия.
Следует добавить, что обеспечение выступа(ов) на канюле 9 является всего лишь предпочтительным вариантом осуществления изобретения, и техническим специалистам будет понятно, что, даже когда канюля 9 имеет гладкую конструкцию, без какого-либо выступа, расположенного на ней, как показано на фиг. 7, техническая проблема также является решаемой, и также можно получить аналогичные полезные результаты. В данном случае, вторую характеристическую точку можно задать на оконечности канюли 9, и радиальное усилие, действующее на оконечность хирургического инструмента, можно вычислять, исходя из зависимости для длин, соответственно выведенной из принципов и зависимости, описанных выше в связи с вышеприведенными вариантами осуществления.
Выше приведено подробное описание способов измерения и вычисления усилий, действующих на оконечность хирургического инструмента, однако, само собой разумеется, что настоящее изобретение включает в себя, но не ограничено вышеописанными способами измерений и вычислений, и предполагается, что любые их модификации также находятся в пределах объема изобретения. Специалисты в данной области техники могут разработать другие варианты осуществления в свете идей из вышеприведенных вариантов осуществления.
Кроме того, вычислительный блок 10 может использовать существующий PLC (программируемый логический контроллер), микрокомпьютер, микропроцессор или подобное устройство, и техническому специалисту будет понятно, как воспользоваться таким вариантом выбора, исходя из настоящего раскрытия, взятого в сочетании с общедоступными знаниями об известном уровне техники.
В общем, некоторые варианты осуществления настоящего изобретения предлагают роботизированную хирургическую систему, включающую в себя ведомый узел и вычислительный блок. Ведомый узел включает в себя роботизированную руку, хирургический инструмент, канюлю и сенсорный элемент. Сенсорный элемент располагается на канюле и выполнен с возможностью измерения аксиальной деформации канюли, и вычислительный блок выполнен с возможностью определения усилия контакта, действующего на канюлю, по измеренной аксиальной деформации, а также радиального усилия, действующего на оконечность хирургического инструмента, в соответствии с усилием контакта. В других вариантах осуществления, на внутренней стенке канюли располагается выступ, который выполнен с возможностью прихода в точечный контакт с хирургическим инструментом, и вычислительный блок выполнен с возможностью определения радиального усилия, действующего на оконечность хирургического инструмента, исходя из усилия точечного контакта, прилагаемого к канюле, в соответствии с аксиальной деформацией, измеренной сенсорным элементом. Когда на оконечность хирургического инструмента действует внешнее усилие, хирургический инструмент будет деформироваться и приходить в контакт с канюлей. В ответ, будет воздействовать реакцией опоры (т.е. вышеупомянутой силой реакции) на участок контакта с хирургическим инструментом. Момент реакции опоры уравновешивается моментом радиальной компоненты (т.е. вышеупомянутого радиального усилия) внешнего усилия, действующего на оконечность хирургического инструмента. Следовательно, радиальное усилие на оконечности хирургического инструмента может точно и однозначно определяться измерением усилия контакта, прилагаемого канюлей к хирургическому инструменту, с одновременным исключением ошибок измерения, которые могут возникать из-за изменения конструкции оконечности хирургического инструмента. В частности, поскольку канюля снабжена выступом, который может быть приведен в точечный контакт с хирургическим инструментом, то радиальное усилие, действующее на оконечность хирургического инструмента может определяться еще точнее посредством измерения усилия контакта между выступом и хирургическим инструментом.
По сравнению с обычными решениями, использующими мощность двигателя для вычисления усилия, действующего на оконечность хирургического инструмента, роботизированная хирургическая система по настоящему изобретению имеет преимущество благодаря как более простому пути передачи усилия, так и более высокой точности измерения радиального усилия. Более того, радиальное усилие, действующее на оконечность хирургического инструмента, можно получать более простым путем, без потребности в дополнительных компонентах, что обеспечивает меньшую конструктивную сложность хирургического инструмента и облегчает его сборку. Кроме того, поскольку в хирургическом инструменте требуются лишь небольшие изменения, то в предлагаемой роботизированной хирургической системе можно соответственно применять различные существующие хирургические инструменты.
Приведенное выше описание является описанием всего лишь нескольких предпочтительных вариантов осуществления настоящего изобретения и никаким образом не ограничивает его объем. Любые изменения и модификации, выполненные специалистами среднего уровня в данной области техники на основе вышеописанных идей, находятся в пределах объема, определяемого прилагаемой формулой изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| РОБОТИЗИРОВАННАЯ ХИРУРГИЧЕСКАЯ СИСТЕМА И ЕЕ ХИРУРГИЧЕСКИЙ ИНСТРУМЕНТ | 2019 |
|
RU2751753C1 |
| ХИРУРГИЧЕСКАЯ СИСТЕМА С СЕНСОРНЫМ ВОСПРИЯТИЕМ ДЛЯ РОБОТИЗИРОВАННОЙ ЛАПАРОСКОПИЧЕСКОЙ ХИРУРГИИ | 2021 |
|
RU2835514C1 |
| ХИРУРГИЧЕСКАЯ РОБОТИЗИРОВАННАЯ СИСТЕМА И ХИРУРГИЧЕСКИЙ ИНСТРУМЕНТ ДЛЯ НЕЕ | 2018 |
|
RU2740114C1 |
| ПЕРЕДАТОЧНЫЕ, ПРИВОДНЫЕ И СТЕРИЛЬНЫЕ УЗЛЫ, ХИРУРГИЧЕСКИЙ ИНСТРУМЕНТ И СИСТЕМА, И ХИРУРГИЧЕСКИЙ РОБОТ | 2020 |
|
RU2790785C1 |
| РОБОТИЗИРОВАННАЯ ХИРУРГИЧЕСКАЯ СИСТЕМА | 2019 |
|
RU2758753C1 |
| ХИРУРГИЧЕСКИЙ СШИВАЮЩИЙ АППАРАТ С ЭЛЕМЕНТАМИ УПРАВЛЕНИЯ, ПРИГОДНЫМИ ДЛЯ РАБОТЫ ОДНОЙ РУКОЙ | 2009 |
|
RU2489099C2 |
| ШАРНИРНО-ПОВОРОТНЫЕ ЗАГРУЗОЧНЫЕ МОДУЛИ ДЛЯ ХИРУРГИЧЕСКИХ СШИВАЮЩИХ СКОБКАМИ И ОТРЕЗНЫХ ИНСТРУМЕНТОВ | 2009 |
|
RU2491027C2 |
| ХИРУРГИЧЕСКИЙ СШИВАЮЩИЙ АППАРАТ С ШАРНИРНО-ПОВОРАЧИВАЕМЫМИ КОМПОНЕНТАМИ | 2009 |
|
RU2489100C2 |
| ХИРУРГИЧЕСКИЙ СШИВАЮЩИЙ АППАРАТ С МЕХАНИЗМОМ ЗАПУСКА, ЧУВСТВИТЕЛЬНЫМ К НАГРУЗКЕ | 2009 |
|
RU2499567C2 |
| ХИРУРГИЧЕСКИЙ СШИВАЮЩИЙ АППАРАТ МНОГОКРАТНОГО ИСПОЛЬЗОВАНИЯ (ВАРИАНТЫ) И СПОСОБ ЕГО ОБРАБОТКИ (ВАРИАНТЫ) | 2009 |
|
RU2488358C2 |
Изобретение относится к медицине, а именно к роботизированным хирургическим системам. Хирургическая система содержит ведомый узел и вычислительный блок. Ведомый узел содержит роботизированную руку, хирургический инструмент, канюлю и сенсорный элемент. Роботизированная рука выполнена с возможностью приведения хирургического инструмента в движение для поворота вокруг удаленного центра движения. Канюля соединена с возможностью разъема с оконечностью роботизированной руки, и ось канюли продолжается через удаленный центр движения. Хирургический инструмент соединен с возможностью разъема с оконечностью роботизированной руки и продолжается дистально по канюле. Сенсорный элемент располагается на канюле и выполнен с возможностью измерения аксиальной деформации канюли. Вычислительный блок выполнен с возможностью определения, по принципу равновесия вращающих моментов, радиального усилия, действующего на оконечность хирургического инструмента, исходя из усилия, действующего на канюлю, измеренного и определенного сенсорным элементом. Достигается обеспечение возможности тактильной обратной связи с повышенной точностью. 14 з.п. ф-лы, 9 ил.
1. Роботизированная хирургическая система, содержащая ведомый узел и вычислительный блок, в которой
ведомый узел содержит роботизированную руку, хирургический инструмент, канюлю и сенсорный элемент, при этом
роботизированная рука выполнена с возможностью приведения хирургического инструмента в движение для поворота вокруг удаленного центра движения,
канюля соединена с возможностью разъема с оконечностью роботизированной руки, и ось канюли продолжается через удаленный центр движения,
хирургический инструмент соединен с возможностью разъема с оконечностью роботизированной руки и продолжается дистально по канюле,
сенсорный элемент располагается на канюле и выполнен с возможностью измерения аксиальной деформации канюли;
вычислительный блок выполнен с возможностью определения, по принципу равновесия вращающих моментов, радиального усилия, действующего на оконечность хирургического инструмента, исходя из усилия, действующего на канюлю, измеренного и определенного сенсорным элементом.
2. Роботизированная хирургическая система по п. 1, в которой на внутренней стенке канюли обеспечен выступ, и выступ выполнен с возможностью образования точечного контакта при приведении в контакт с хирургическим инструментом, при этом канюля содержит базовую точку, расположенную в удаленном центре движения, и как выступ, так и сенсорный элемент расположены с одной стороны от базовой точки, дальше от оконечности роботизированной руки, и причем вычислительный блок выполнен с возможностью определения радиального усилия, действующего на оконечность хирургического инструмента, исходя из усилия, действующего на канюлю в месте точечного контакта, измеренного и определенного сенсорным элементом.
3. Роботизированная хирургическая система по п. 2, в которой на внутренней стенке канюли обеспечен один выступ; или по внутренней стенке канюли обеспечено и симметрично распределено несколько выступов.
4. Роботизированная хирургическая система по п. 2, в которой сенсорный элемент располагается ближе к оконечности роботизированной руки, чем располагается выступ.
5. Роботизированная хирургическая система по любому из пп. 1-4, в которой несколько сенсорных элементов симметрично распределены на внутренней поверхности и/или внешней поверхности канюли.
6. Роботизированная хирургическая система по п. 1 или 2, в которой канюля содержит оправу, выполненную с возможностью разъемного соединения с оконечностью роботизированной руки.
7. Роботизированная хирургическая система по п. 1 или 2, в которой канюля выполнена с возможностью расположения коаксиально или по посадке с зазором с хирургическим инструментом.
8. Роботизированная хирургическая система по п. 1, в которой хирургический инструмент содержит силовой модуль, инструментальный стержень, первую характеристическую точку, вторую характеристическую точку и третью характеристическую точку; при этом силовой модуль соединен с проксимальным концом инструментального стержня, инструментальный стержень выполнен с возможностью образования точечного контакта, при приведении в контакт с канюлей, первая характеристическая точка задана в месте, в котором инструментальный стержень соединяется с силовым модулем, вторая характеристическая точка задана в месте инструментального стержня, соответствующем оконечности канюли, третья характеристическая точка задана на оконечности хирургического инструмента, и причем радиальное усилие, действующее на третью характеристическую точку, доступно для определения вычислительным блоком, исходя из усилия, действующего на вторую характеристическую точку, расстояния между первой характеристической точкой и второй характеристической точкой и расстояния между первой характеристической точкой и третьей характеристической точкой.
9. Роботизированная хирургическая система по п. 2, в которой хирургический инструмент содержит силовой модуль, инструментальный стержень, первую характеристическую точку, вторую характеристическую точку и третью характеристическую точку; при этом силовой модуль соединен с проксимальным концом инструментального стержня, инструментальный стержень выполнен с возможностью образования точечного контакта, при приведении в контакт с выступом, первая характеристическая точка задана в месте, в котором инструментальный стержень соединяется с силовым модулем, вторая характеристическая точка задана в месте, в котором может контактировать с инструментальным стержнем, третья характеристическая точка задана на оконечности хирургического инструмента, и причем радиальное усилие, действующее на третью характеристическую точку, доступно для определения вычислительным блоком, исходя из усилия, действующего на вторую характеристическую точку, расстояния между первой характеристической точкой и второй характеристической точкой и расстояния между первой характеристической точкой и третьей характеристической точкой.
10. Роботизированная хирургическая система по п. 8 или 9, в которой расстояние между первой характеристической точкой и второй характеристической точкой получают, исходя из начального значения расстояния между первой характеристической точкой и второй характеристической точкой, определенного во время инициализации роботизированной хирургической системы, и смещения хирургического инструмента вдоль оси канюли от начального положения хирургического инструмента, определенного во время инициализации роботизированной хирургической системы.
11. Роботизированная хирургическая система по п. 1 или 2, в которой хирургический инструмент содержит силовой модуль и передаточный механизм, выполненный с возможностью передачи выходного усилия от силового модуля к оконечности хирургического инструмента, при этом силовой модуль содержит электродвигатель аксиального привода, выполненный с возможностью приведения хирургического инструмента в движение в аксиальном направлении, и причем вычислительный блок выполнен с возможностью определения аксиального усилия, действующего на оконечность хирургического инструмента, исходя из выходного усилия электродвигателя аксиального привода и передаточного отношения передаточного механизма.
12. Роботизированная хирургическая система по п. 11, в которой выходное усилие электродвигателя аксиального привода доступно для вычисления по электрическому току, протекающему через электродвигатель аксиального привода, или измерения датчиком, расположенным на выходном валу электродвигателя аксиального привода.
13. Роботизированная хирургическая система по п. 11, в которой на внешней поверхности хирургического инструмента обеспечено покрытие для уменьшения трения между хирургическим инструментом и канюлей.
14. Роботизированная хирургическая система по п. 1 или 2, дополнительно содержащая ведущий узел, содержащий индикатор усилия, выполненный с возможностью обеспечения восприятия радиального усилия, действующего на оконечность хирургического инструмента.
15. Роботизированная хирургическая система по п. 14, в которой индикатор усилия является ведущим манипулятором, снабженным электродвигателем, коммуникативно соединенным с вычислительным блоком, или индикатор усилия является системой визуализации.
| US 20060161136 A1, 20.07.2006 | |||
| Способ определения режущих свойств инструментальных материалов | 1957 |
|
SU122326A1 |
| US 20090248038 A1, 01.10.2009 | |||
| US 20100094312 A1, 15.04.2010 | |||
| US 20160216167 A1, 28.07.2016. | |||

