Область техники
Настоящее изобретение относится к технической области медицинских устройств и, в частности, к роботизированной хирургической системе и ее хирургический инструмент.
Уровень техники
Робот-ассистированная хирургическая система обычно использует структуру копирующего управления, состоящую из задающего устройства (на стороне хирурга) и ведомого манипулятора (на стороне пациента). Задающее устройство обычно выполнено с возможностью трехмерного перемещения на базе таких компонентов, как роботизированные руки, многомерная мышь, джойстики и т.п., тогда как ведомый манипулятор обычно является роботизированной рукой с несколькими степенями подвижности, удерживающей на своем конце хирургические инструменты (например, иглодержатели, электрокоагуляционные щипцы, зонды для электрохирургической каутеризации, зажимы тканей, ножницы и т.п.) Во время операции, на основании эндоскопического 3-мерного изображения целевого хирургического поля, отображаемого на устройстве отображения, хирург управляет задающим устройством так, чтобы ведомый манипулятор повторял движение задающего устройства, чтобы приводить в движение хирургические инструменты для выполнения различных хирургических операций, например, ретракцию ткани, наложение шва, зажим кровеносного сосуда, вскрытие, каутеризацию, коагулирование ткани и т.п.
Такая робот-ассистированная хирургическая система обеспечивает следующие преимущества:
Во-первый, она предназначена для выполнения минимально инвазивного вмешательства через небольшой хирургический разрез, сделанный в теле пациента, что имеет результатом снижение травматичности для пациента и, следовательно, ослабление послеоперационых болей, быстрое восстановление, снижение риска инфицирования и минимизацию потребности в переливании крови.
Во-вторых, данная система производит операцию намного точнее и стабильнее, по сравнению с руками человека. Например, система может ослаблять физиологический тремор, и даже мелкие капилляры могут быть отчетливо видимыми в 3-мерном визуальном операционном поле, что обеспечивает высокой степень хирургической безопасности.
Однако, поскольку робот-ассистированная система действует на основе режима телеуправления, который не дает хирургу возможности получать непосредственное тактильное ощущение для определения жесткости тканей, ощущения пульсации сосудов, а также лишен обратной связи с захватными и нажимными действия. Обратная связь может возникать только в случае, когда происходит серьезное столкновение хирургического инструмента с телом человека, и ощутимые сигналы обратной связи с трудом возникают в случае слабых касаний. Следовательно, придание такому роботу способности корректировать движение ведомого манипулятора в соответствии с изменением силы, прикладываемой к контактному концу хирургического инструмента, который приводится в контакт с тканью тела, и предоставлять хирургу соответствующие показания силовой обратной связи может значительно повысить безопасность системы.
Большинство традиционных механизмов силовой обратной связи работают на основе датчиков крутящего момента, расположенных в шарнирах робота, и момент силы на контактном конце можно вычислить по моменту силы на шарнире. Однако данный подход имеет ряд недостатков в том отношении, что вычисленная контактная сила не может точно отражать в реальном времени то, что действительно происходит. Более того, способность определять небольшую контактную силу требует повышения точности и разрешающей способности измерений моментными датчиками, что делает датчик, имеющий высокую разрешающую способность, чувствительным к шумам, создает искажения сигналов и приводит к большим затратам. Кроме того, привод в хирургическом инструменте обычно обеспечивается тросами, которые, очевидно, не пригодны для размещения на них датчиков натяжения.
В патенте США №8491574 B2 раскрыто решение вышеупомянутых проблем, в котором тензочувствительный элемент, способный непосредственно измерять внешнюю силу, встроен в контактный конец хирургического инструмента. Однако это решение все еще связано со следующими недостатками:
Во-первых, единственная хирургическая операция наверняка нуждается во множестве хирургических инструментов. Когда, каждый из данных хирургических инструментов снабжен соответствующим датчиком, то это осложнит обеспечение постоянство измерения на разных датчиках. Даже когда каждый датчик калибруют, точная запись всех физических параметров инструментов является сложной задачей.
Во-вторых, физические свойства чувствительных элементов чувствительны к таким факторам, как температура, влажность и атмосферное давление, и рабочие параметры чувствительных элементов изменяются при переходе между такими окружающими средами, как пространства внутри и снаружи тела пациента. Следовательно, таким чувствительным элементам трудно согласовано описать силы, действующие на хирургические инструменты.
В-третьих, сами хирургические инструменты являются расходными материалами и, в общем, могут применяться до 10 раз, однако датчики на инструментах являются многократно используемыми. Очевидно, удаление хирургического инструмента в отходы вместе с датчиками на практике не выгодно экономически.
В публикации WO 2009/079301 A1 раскрыто силоизмерительное устройство, включающее в себя внутреннюю трубку и внешнюю трубку, расположенную поверх внутренней трубки. Тензометрические датчики располагаются на внутренней трубке, и проксимальный конец внутренней трубки соединен с хирургическим инструментом таким образом, что тензометрические датчики на внутренней трубке могут воспринимать силу, действующую на хирургический инструмент. Однако, данному силоизмерительному устройству сопутствует ряд проблем, например, неудовлетворительное постоянство измерений и низкая точность измерения.
В публикации CN 104764552 A раскрыт силоизмерительный датчик для измерения хирургических усилий, который имеет сложную конструкцию с несколькими консолями. Кроме того, поскольку тензометрические датчики не располагаются непосредственно на компонентах, которые претерпевают деформации, то их точность измерения снижена. Кроме того, с данным силоизмерительным датчиком сопряжены следующие проблемы: из-за отсутствия точной математической модели, измерение может рассчитывать только на калибровку, что делает невозможным получение точных результатов; и измерение аксиальной силы не доступно из-за его конструктивно-силовой схемы.
Сущность изобретения
Целью некоторых вариантов осуществления настоящего изобретения является создание роботизированной хирургической системы и ее хирургического инструмента, которые могут решить одну или более вышеописанных проблем известного уровня техники, в том числе, низкую точность измерения контактной силы на контактном конце хирургического инструмента и ненужную утилизацию датчиков.
Вышеописанные и сопутствующие цели достигаются посредством создания хирургического инструмента, содержащего механическую конструкцию, втулку и датчик силы;
при этом механическая конструкция содержит стержень и рабочий орган, соединенный с контактным концом стержня;
втулка жестко или разъемно надета на контактный конец стержня;
датчик силы содержит, по меньшей мере, один чувствительный элемент и периферический измерительный модуль, соединенный с чувствительным элементом, причем чувствительный элемент расположен на втулке и выполнен с возможностью получения информации о деформации втулки;
причем периферический измерительный модуль выполнен с возможностью получения напряжения, измеренного чувствительным элементом, на основании информации о деформации, полученной чувствительным элементом, и получения как эквивалентной результирующей силы, так и эквивалентного результирующего момента действующей силы, прилагаемой стержнем к втулке, на основании напряжения, измеренного чувствительным элементом, положения чувствительного элемента и направления оси чувствительности чувствительного элемента, с получением, тем самым, контактной силы, действующей на рабочий орган хирургического инструмента.
В дополнительном варианте, втулка содержит углубленную часть, продолжающуюся в окружном направлении, при этом углубленная часть содержит множество деформируемых элементов и отверстий, расположенных, каждое, между соседними двумя деформируемыми элементами, причем деформируемые элементы выполнены с возможностью соединения верхней секции втулки выше углубленной части с нижней секцией втулки ниже углубленной части,
причем, по меньшей мере, один чувствительный элемент располагается на деформируемых элементах и выполнен с возможностью измерения напряжения на деформируемых элементах.
В дополнительном варианте, деформируемые элементы имеют модуль упругости, который превышает модуль упругости стержня.
В дополнительном варианте, каждый из деформируемых элементов имеет внутреннюю поверхность, внешнюю поверхность и боковые поверхности, и при этом, по меньшей мере, один чувствительный элемент располагается на внутренних поверхностях, внешних поверхностях или боковых поверхностях деформируемых элементов.
В дополнительном варианте, углубленная часть располагается вокруг средней по оси части втулки.
В дополнительном варианте, ось чувствительности чувствительного элемента располагается параллельно или перпендикулярно аксиальному направлению втулки.
В дополнительном варианте, втулка жестко надета на контактный конец стержня при помощи склеивания, посадки с натягом или вставки.
В дополнительном варианте, втулка разъемно надета на контактный конец стержня при помощи резьбового соединения, соединения-защелки или самофиксирующегося соединения.
В дополнительном варианте, втулка имеет один конец, расположенный наравне с контактным концом стержня.
В дополнительном варианте, периферический измерительный модуль содержит, последовательно соединенные с возможностью информационного обмена друг с другом, блок сбора данных, блок преобразования сигналов и вычислительный и выходной блок; при этом блок сбора данных выполнен с возможностью получения выходных сигналов из чувствительного элемента, блок преобразования сигналов выполнен с возможностью преобразования выходных сигналов из чувствительного элемента, и вычислительный и выходной блок выполнен с возможностью выполнения вычисления на основании преобразованных сигналов, чтобы получать контактную силу на рабочем органе.
В дополнительном варианте, напряжение, измеренное чувствительным элементом, определяется формулой:

где i означает i-тый чувствительный элемент; 


В дополнительном варианте, контактная сила содержит эквивалентную результирующую силу 

при этом периферический измерительный модуль выполнен с возможностью установления координатной системы {p} для расположенной на нем втулки, координатной системы {q} для хирургического инструмента на его контактном конце, и дескрипторов положения и позиции координатной системы {p} в координатной системе {q};
периферический измерительный модуль дополнительно выполнен с возможностью получения дескриптора напряжения, измеренного чувствительным элементом в координатной системе {q}, на основании дескриптора позиции координатной системы {p} в координатной системе {q}, дескриптора направления оси чувствительности чувствительного элемента в координатной системе {p} и напряжения, измеренного чувствительным элементом, с получением, тем самым, эквивалентной результирующей силы
периферический измерительный модуль дополнительно выполнен с возможностью получения дескриптора положения чувствительного элемента в координатной системе {q} на основании дескрипторов положения и позиции координатной системы {p} в координатной системе {q} и дескриптора положения чувствительного элемента в координатной системе {p}; и
периферический измерительный модуль дополнительно выполнен с возможностью получения дескриптора момента силы, действующей на втулку в координатной системе {q}, на основании дескриптора напряжения, измеренного чувствительным элементом, в координатной системе {q}, с получением, тем самым, эквивалентного результирующего момента
В дополнительном варианте, дескриптор напряжения, измеренного чувствительным элементом в координатной системе {p}, определяется формулой:

где 
В дополнительном варианте, дескриптор напряжения, измеренного чувствительным элементом в координатной системе {q}, определяется формулой:
где 

эквивалентная результирующая сила
где 

В дополнительном варианте, дескриптор положения чувствительного элемента в координатной системе {q} определяется формулой:
где 

 означает дескриптор положения координатной системы {p} в координатной системе {q}.
означает дескриптор положения координатной системы {p} в координатной системе {q}.
В дополнительном варианте, эквивалентный результирующий момент

где 
В дополнительном варианте, углубленная часть содержит четыре деформируемых элемента, которые располагаются в окружном направлении; датчик силы содержит четыре чувствительных элемента, расположенных, каждый, на внешней поверхности соответствующего одного из деформируемых элементов; все дескрипторы 
при этом дескрипторы напряжения, измеренного четырьмя чувствительными элементами, в координатной системе {q} даются в форме:
где 



эквивалентная результирующая сила

18. Хирургический инструмент по п. 17, в котором:
положения чувствительных элементов измеряются как соответствующие центральные положения, которые описываются в координатной системе {q} в форме:
где 

















В дополнительном варианте, эквивалентный результирующий момент

Кроме того, настоящее изобретение предлагает также роботизированную хирургическую систему, содержащую ведомый манипулятор, при этом ведомый манипулятор содержит: роботизированную руку; и вышеописанный хирургический инструмент, причем роботизированная рука содержит контактный конец, разъемно соединенный с хирургическим инструментом, и роботизированная рука выполнена с возможностью приведения хирургического инструмента в движение вокруг удаленного центра движения.
В дополнительном варианте, роботизированная хирургическая система дополнительно содержит задающее устройство и блок управления, при этом задающее устройство содержит индикатор силы;
причем блок управления соединен с возможностью информационного обмена как с задающим устройством, так и с ведомым манипулятором; блок управления выполнен с возможностью получения информации о контактной силе, действующей на рабочий орган, из датчика силы хирургического инструмента и передачи информации в индикатор силы, причем индикатор силы выполнен с возможностью представления информации о контактной силе, действующей на рабочий орган.
В дополнительном варианте, ведомый манипулятор дополнительно содержит:
эндоскоп; и
держатель эндоскопа, разъемно соединенный с эндоскопом;
при этом периферический измерительный модуль хирургического инструмента выполнен с возможностью установления координатной системы {p} для втулки, координатной системы {q} для хирургического инструмента и координатной системы {e} для эндоскопа и получения, из матрицы 
 из координатной системы {q} в координатную систему {e}, дескриптора контактной силы, действующей на рабочий орган в координатной системе {e}, в форме:
из координатной системы {q} в координатную систему {e}, дескриптора контактной силы, действующей на рабочий орган в координатной системе {e}, в форме:

где 


Таким образом, роботизированная хирургическая система и ее хирургический инструмент, предложенные в настоящем изобретении, обеспечивают, по меньшей мере, одно из следующих преимуществ:
Во-первых, между втулкой и механической конструкцией хирургического инструмента не возникает никакого просвета. Это способствует повышению точности измерений.
Во-вторых, для хирургической операции, требующей применения нескольких хирургических инструментов, специальный процесс калибровки может выполняться на каждом из хирургических инструментов, что устраняет влияние неодинаковости материала инструмента на измерение.
В-третьих, на разных хирургических инструментах можно использовать одинаковую втулку, которая передает деформации данных хирургических инструментов. По сравнению с чувствительными элементами, непосредственно закрепленными к контактным концам хирургических инструментов, применение чувствительных элементов с втулкой может исключить ошибки измерения, которые могут возникать из-за несогласованности измерений между разными чувствительными элементами на разных хирургических инструментах, что помогает обеспечить более высокую степень достоверности и точности измерений.
В-четвертых, соединение чувствительных элементов с хирургическими инструментами с помощью втулок может избавить от необходимости удаления чувствительных элементов в отходы вместе с хирургическими инструментами. Хирургические инструменты являются расходными материалами, тогда как чувствительные элементы допускают многократное использованием. Очевидно, удаление хирургического инструмента в отходы вместе с датчиками на практике не выгодно экономически и приведет к повышению стоимости эксплуатации.
В предпочтительном варианте осуществления настоящего изобретения, множество чувствительных элементов располагается на деформируемых элементах втулки предварительно заданным образом, и каждый из чувствительных элементов имеет предварительно заданные координаты в координатной системе для хирургического инструмента. Исходя из предварительно заданных координат, можно определить положения чувствительных элементов на деформируемых элементах, что допускает, по меньшей мере, одномерное измерение контактной силы, действующей на контактный конец хирургического инструмента. Это подразумевает облегчение и упрощение способа измерения контактной силы, по которому измерение, по меньшей мере, одномерной контактной силы обеспечивается только посредством настройки положений чувствительного элемента относительно координатной системы для хирургического инструмента.
Краткое описание чертежей
Фиг. 1 - схематическое изображение роботизированной хирургической системы в соответствии с вариантом осуществления настоящего изобретения;
Фиг. 2 - схематическое изображение механической конструкции хирургического инструмента в соответствии с вариантом осуществления настоящего изобретения;
Фиг. 3 - схематическое изображение хирургического инструмента, который выполняет хирургическую операцию, в соответствии с вариантом осуществления настоящего изобретения;
Фиг. 4a - схематическое изображение датчика силы и втулки в хирургическом инструменте в соответствии с вариантом осуществления настоящего изобретения;
Фиг. 4b - структурная схема периферического измерительного модуля в хирургическом инструменте в соответствии с вариантом осуществления настоящего изобретения;
Фиг. 5a - схематическое изображение втулки, расположенной на стержне в хирургическом инструменте в соответствии с вариантом осуществления настоящего изобретения;
Фиг. 5b - схематическое, увеличенное, частичное изображение втулки и стержня, показанных на фиг. 5a;
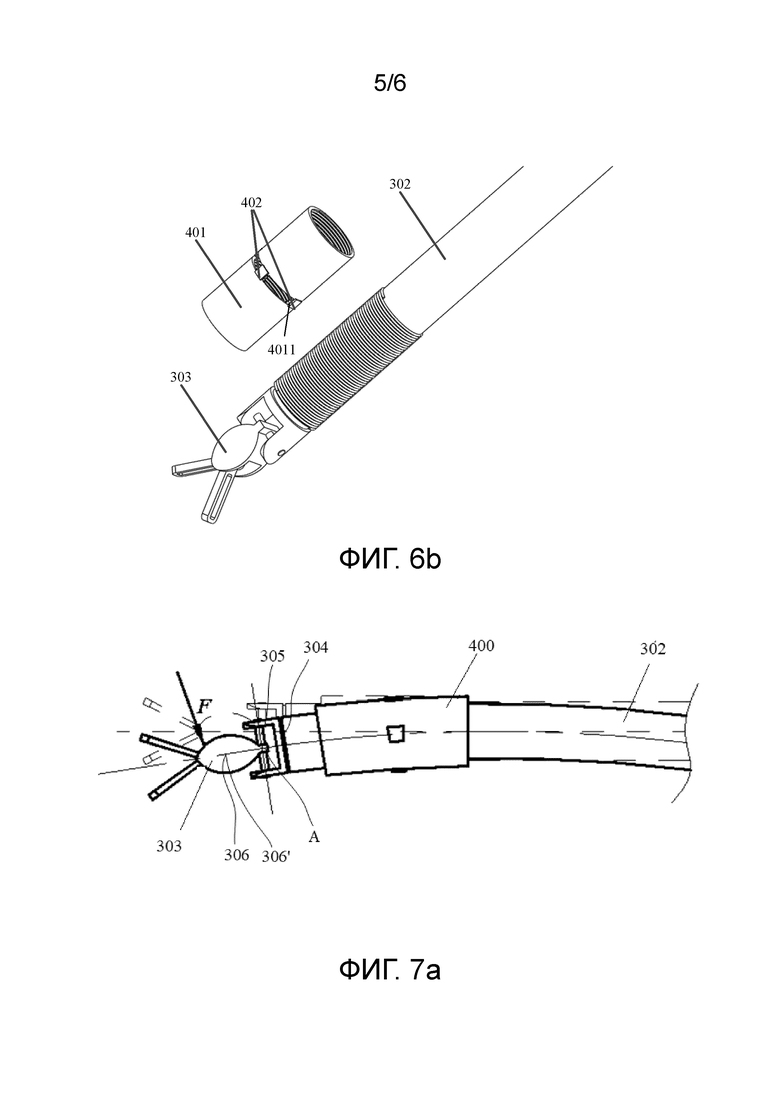
Фиг. 6a - схематическое изображение втулки, которая не собрана со стержнем, в соответствии с вариантом осуществления настоящего изобретения;
Фиг. 6b - схематическое изображение втулки, которая не собрана со стержнем, в соответствии с другим вариантом осуществления настоящего изобретения;
Фиг. 7a - схематическое изображение хирургического инструмента, который испытывает действие силы с одной стороны и деформирован, в соответствии с вариантом осуществления настоящего изобретения;
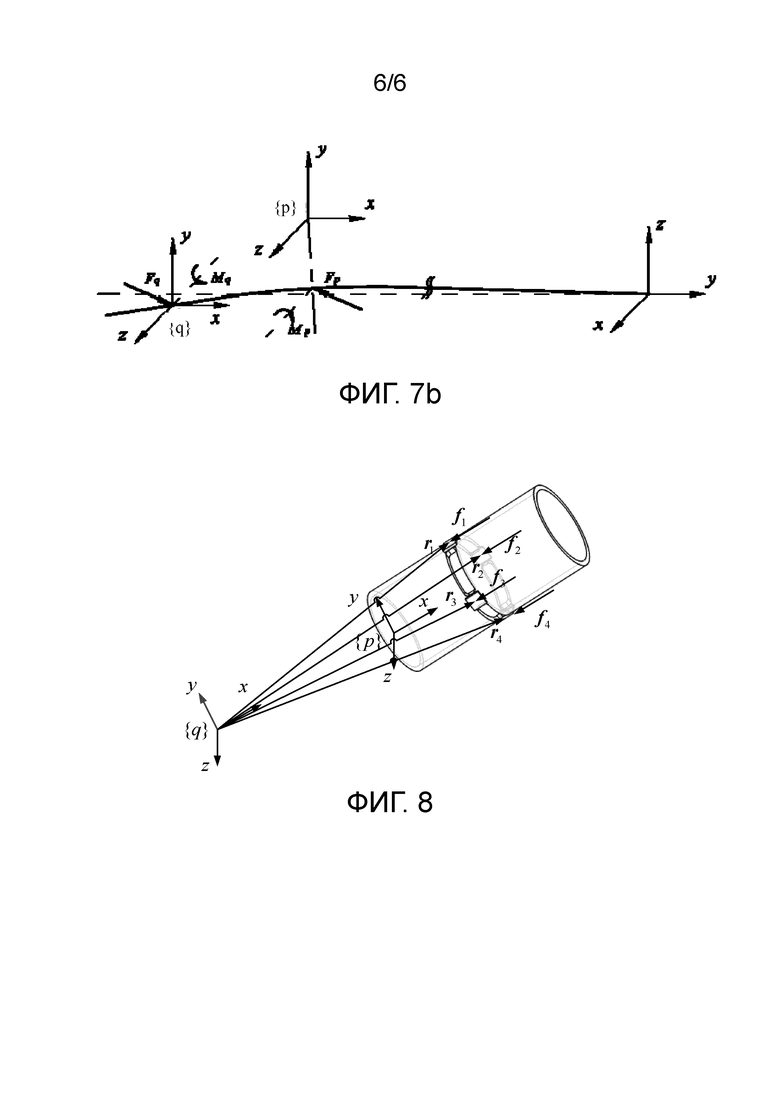
Фиг. 7b - схема, поясняющая анализ силы, действующей на контактный конец хирургического инструмента, и принцип измерения данной силы в соответствии с вариантом осуществления настоящего изобретения; и
Фиг. 8 - схема, поясняющая принципы измерения сил трехмерным датчиком силы в соответствии с вариантом осуществления настоящего изобретения.
На указанных чертежах ссылочной позицией 1 обозначена хирургическая стойка; 2 - роботизированная рука; 3 - хирургический инструмент; 301 - силовой модуль; 302 - стержень; 303 - рабочий орган; 304 - шарнир вращения; 305 - шарнир тангажа; 306, 306' - шарнир рыскания; 4 - эндоскоп; 5 - система визуализации; 6 - хирург; 7 - задающий манипулятор; 8 - пациент; 400 - датчик силы; 401 - втулка; 4011 - деформируемый элемент; 402 - чувствительный элемент; 403 - периферический измерительный модуль; 4031 - блок сбора данных; 4032 - блок преобразования сигналов; и 4033 - вычислительный и выходной блок.
Подробное описание изобретения
Цели, преимущества и признаки настоящего изобретения станут очевидными после чтения следующего описания роботизированной хирургической системы и ее хирургического инструмента, предложенных в изобретении, в связи с прилагаемыми чертежами, т.е., фиг. 1-8. Следует отметить, что фигуры представлены в очень упрощенной форме, не обязательно в масштабе, с единственным намерением сделать удобным и ясным объяснение нескольких вариантов осуществления, раскрытых в описании. Для целей настоящей описания, термин «контактный конец» или «дистальный конец» изделия относится к его концу, наиболее удаленному от пользователя, управляющего изделием, а «проксимальный конец» относится к концу изделия, расположенному ближе к пользователю.
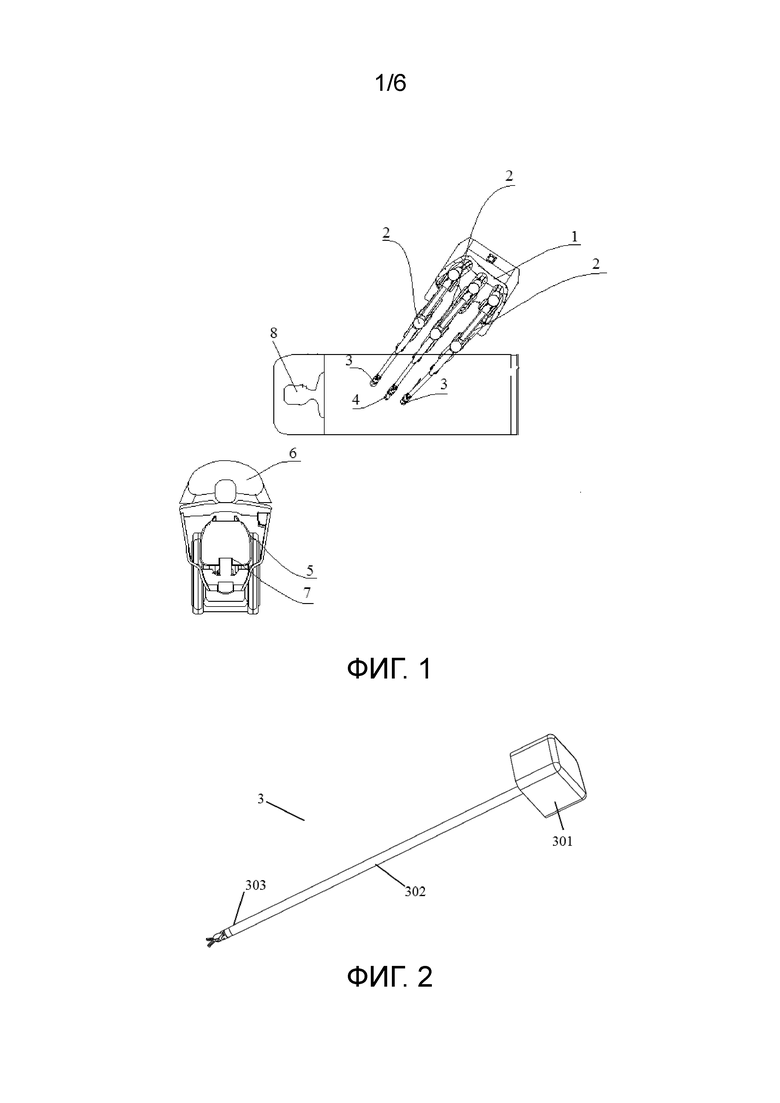
Фиг. 1 является схематическим изображением роботизированной хирургической системы в соответствии с вариантом осуществления настоящего изобретения. Как показано на фиг. 1, роботизированная хирургическая система включает в себя ведомый манипулятор, включающий в себя хирургическую стойку 1, роботизированные руки 2, хирургический инструмент 3 и эндоскоп 4. Хирургическая стойка 1 служит основанием ведомого манипулятора и поддерживает все его механические компоненты. В предпочтительном варианте, хирургическая стойка 1 способна перемещаться по поверхности с целью перемещения ведомого манипулятора ближе к пациенту 8 или дальше от него.
Роботизированная рука 2 установлена на хирургической стойке 1 и имеет несколько степеней подвижности, что позволяет ей перемещаться в пространстве в некоторых пределах. Когда хирургическая стойка 1 входит в окрестность пациента 8, роботизированную руку 2 можно выставлять, чтобы размещать хирургический инструмент 3 в запланированном рабочем положении. Хирургический инструмент 3 устанавливается с возможностью съема на контактном конце одной из роботизированных рук 2 и выполнен как исполнительный механизм ведомого манипулятора, который способен поворачиваться вокруг удаленного центра движения (RCM) с приводом от роботизированной руки 2. Хирургический инструмент 3 имеет рабочий орган 303, выполненный с возможностью введения в тело пациента для лечения в нем патологического изменения.
Эндоскоп 4 устанавливается на контактном конце другой роботизированной руки 2 (которая, следовательно, называется в настоящем описании «держателем эндоскопа») и выполнена с возможностью сбора зрительной информации в операционном окружении, включающей в себя, но без ограничения, информацию о патологическом изменении и информацию о положении и позиции хирургического инструмента 3. Дополнительно, эндоскоп 4, установленный на роботизированной руке 2, соединен с возможностью информационного обмена с задающим устройством и, как подробно описано ниже, выполнен с возможностью отображения в реальном времени собранной зрительной информации в операционном окружении. Эндоскоп 4 может быть стереоскопическим или нестереоскопическим, без ограничения.
Фиг. 2 является схематическим изображением механической конструкции хирургического инструмента в соответствии с вариантом осуществления настоящего изобретения. Как показано на фиг. 2, механическая конструкция хирургического инструмента 3 включает в себя силовой модуль 301, стержень 302, трансмиссию и рабочий орган 303. Трансмиссия может представлять собой трансмиссионные тросы, которые размещаются в стержне 302 и соединены как с силовым модулем 301, так и с рабочим органом 303. Силовой модуль 301 может быть расположен на проксимальном конце стержня 302, и рабочий орган 303 быть расположен на дистальном конце стержня 302.
Силовой модуль 301 выполнен с возможностью подачи на рабочий орган 303 приводного усилия, которое подается на рабочий орган 303 посредством трансмиссии и предназначено, чтобы вынуждать рабочего органа 303 выполнять трехмерное перемещение, например, поворот, открывание/смыкание и т.п. Конкретные операции, которые рабочий орган 303 может выполнять на патологическом изменении в теле пациента, могут включать в себя разрезание, зондирование, зажим и т.п. Соответственно, рабочий орган 303 можно использовать как ножницы, щипцы, зонд и т.п. В соответствии с настоящим изобретением, силовой модуль 301 может иметь автономное питание. В этом случае, например, силовой модуль 301 может включать в себя источник питания и первичный привод. В качестве альтернативы, силовой модуль 301 может также иметь внешнее питание для подачи на рабочий орган 303 приводного усилия. В этом случае, например, силовой модуль 301 может включать в себя интерфейс, подключенный с внешним источником питания и, в предпочтительном варианте, может дополнительно включать в себя модуль распределения электропитания.
Как показано на фиг. 1, роботизированная хирургическая система дополнительно включает в себя задающее устройство, содержащее систему 5 визуализации и задающий манипулятор 7. Во время хирургической операции, одновременно с контролем перемещения хирургического инструмента 3, которое изображается зрительной информацией, собранной эндоскопом 4 и отображаемой на системе 5 визуализации, хирург 6 может управлять хирургическим инструментом, чтобы 3 выполнять трехмерные перемещения, необходимые для операции, такие как движения тангажа, рыскания, вращения, открывания/смыкания и т.п., посредством манипуляции задающим манипулятором 7.
Фиг. 3 схематически изображает хирургический инструмент, выполняющий хирургические операции, в соответствии с вариантом осуществления настоящего изобретения, который выполняет хирургическую операцию. Как показано на фиг. 3, хирург 6 может манипулировать одним или более такими хирургическими инструментами 3 (одинаковыми или нет) посредством задающего манипулятора 7, чтобы выполнять разрезание, зондирование, зажим и другие действия, необходимые при хирургической операции.
Очевидно, управление хирургическими инструментом(ами) 3 посредством задающего манипулятора 7 является основой для копирующего управления роботизированной хирургической системой. Однако, поскольку такое управление основано на телеуправлении, то хирург не может непосредственно ощущать величину прилагаемой силы, что не благоприятствует тому, чтобы хирург выполнял подходящее действие на основании величины контактной силы. Для решения данной проблемы, настоящее изобретение предлагает хирургический инструмент с возможностью силовой обратной связи, которая позволяет хирургу 6 ощущать силу, действующую на контактный конец хирургического инструмента.
Фиг. 4a является схематическим изображением датчика силы и втулки в хирургическом инструменте в соответствии с вариантом осуществления настоящего изобретения. Как показано на фиг. 4a, в дополнение к вышеописанным механическим компонентам, хирургический инструмент 3 дополнительно включает в себя втулку 401 и датчик 400 силы. Датчик 400 силы включает в себя чувствительные элементы 402 и периферический измерительный модуль 403. Втулка 401 имеет просвет с внутренним диаметром, который согласуется с внешним диаметром стержня 302 в хирургическом инструменте 3. Кроме того, втулка 401 включает в себя углубленную часть, продолжающуюся по окружности, которая формирует замкнутое кольцо по окружности втулки 401. В данном случае, выражение «круговая протяженность» углубленной части по втулке 401 означает, что среднее поперечное сечение углубленной части может быть либо перпендикулярным, либо наклонным к оси втулки 401. Углубленная часть включает в себя множество деформируемых элементов 4011, отделенных друг от друга отверстиями, каждое из которых находится между соседними двумя из деформируемых элементов 4011. По существу, деформируемые элементы 4011 соединяют верхнюю секцию втулки (выше углубленной части) с нижней секцией втулки (ниже углубленной части). В такой конструкции, внешняя сила передается от одного конца втулки другому концу через деформируемые элементы 4011, и величину и направление внешней силы можно определить измерением силы, передаваемой соответствующими деформируемыми элементами 4011. Данная конструкция может облегчить измерение внешней силы с использованием менее сложного алгоритма и с повышенной точностью.
В предпочтительном варианте осуществления, показанном на фиг. 8, углубленная часть, которая продолжается по окружности на втулке 401, включает в себя четыре деформируемых элемента 4011, распределенных с центральной симметрией, и формирует крестообразную форму. Настоящее изобретение не ограничено никаким конкретным способом изготовления углубленной части и деформируемых элементов 4011. В примерном варианте осуществления, втулку 401 с углубленной частью изготавливают механическим удалением ненужных участков из трубчатой заготовки, например, посредством электроэрозионной обработки или электроискровой обработки. В альтернативном варианте осуществления, втулку можно изготавливать закреплением деформируемых элементов 4011 к верхней и нижней секциям. Следовательно, деформируемые элементы 4011 могут быть выполнены либо из такого же материала, как остальной материал втулки, либо из отличающегося материала. Чтобы обеспечить повышение чувствительности измерения силы, что может способствовать восприятию чувствительными элементами 402 внешней силы, действующей на хирургический инструмент, деформируемые элементы 4011 можно изготавливать из материала, выбранного так, чтобы его модуль упругости не превышал модуль упругости стержня 302, например, резины.
Каждый деформируемый элемент 4011 имеет внутреннюю поверхность, внешнюю поверхность и боковые поверхности. Чувствительные элементы 402 могут быть размещены на внутренней, внешней или боковых поверхностях деформируемых элементов 4011 на втулке 401. В предпочтительном варианте, каждый из чувствительных элементов 402 имеет ось чувствительности, продолжающуюся в аксиальном или окружном направлении втулки 401, и может воспринимать величины сил, действующих на деформируемые элементы 4011 вдоль оси чувствительности. При этом, направление протяженности «оси чувствительности» означает единственное направление, по которому чувствительные элементы 402 воспринимают деформацию. То есть, чувствительные элементы 402 не имеют чувствительности по любому другому направлению. В некоторых предпочтительных вариантах осуществления настоящего изобретения, ось чувствительности чувствительного элемента 402 установлена параллельно аксиальному направлению втулки 401. На практике, чувствительные элементы 402 можно установить так, что их ось чувствительности продолжается параллельно аксиальному направлению втулки 401, что позволяет им воспринимать деформации деформируемых элементов 4011 в данном направлении.
Чувствительные элементы 402 можно выбрать в форме тензометрических датчиков, волоконно-оптических или других компонентов, в соответствии с условиями их применения и требованиями к измерениям. Число чувствительных элементов 402 можно выбирать, и их расположение можно проектировать перенастраиваемым способом, в зависимости от типа контактной силы, подлежащей измерению и надежности датчика. Чувствительные элементы 402 можно закреплять на внутренней, внешней или боковых поверхностях деформируемых элементов 4011 на втулке 401 перенастраиваемым способом, в зависимости от того, как выполняется закрепление, и сложно ли его выполнить. В предпочтительном варианте, углубленная часть и, следовательно, деформируемые элементы 4011 располагается на участке втулки 401, обычно испытывающем наибольшую деформацию (например, на средней по оси части втулки 401). В предпочтительном варианте, множество чувствительных элементов 402, расположенных на деформируемых элементах 4011 допускает одно- или многомерное измерение контактной силы, например, трех- или шестимерное измерение контактной силы. В более предпочтительном варианте, каждый из деформируемых элементов 4011 снабжен (например, на его внешней поверхности) одним чувствительным элементом 402.
Следует отметить, что, при практическом проектировании, следует также учитывать конструктивную прочность втулки 401. Например, хотя теоретически осуществимо, чтобы углубленная часть содержала только один деформируемый элемент 4011, конструктивная прочность втулки 401 в этом случае может быть слишком низкой, чтобы обеспечивать возможность требуемой передачи втулкой внешней силы или не допускать значительных пластических деформаций деформируемого элемента 4011, которые негативно влияют на точность измерений. Поэтому, предпочтительным является вариант осуществления, показанный на фиг. 8, с четырьмя деформируемыми элементами 4011, которые расположены с равномерными угловыми интервалами по окружности углубленной части и, следовательно, на четырех концах симметричного креста.
Периферический измерительный модуль 403 соединен с возможностью информационного обмена (например, электрически) с чувствительным элементом 402 и выполнен с возможностью сбора информации о деформации деформируемых элементов 4011, получаемой чувствительными элементами 402 (возможно, в форме электрических сигналов, например, сопротивления или напряжения) и, в конечном итоге, вывода контактной силы, действующей на контактный конец хирургического инструмента, из информации о деформации. В данном варианте осуществления, периферический измерительный модуль 403 может включать в себя микропроцессор для приема выходных электрических сигналов из чувствительных элементов 402 и вывода, путем вычислений, контактной силы, действующей на контактный конец хирургического инструмента, из принятых электрических сигналов. Вместо микропроцессора можно выбрать любое другое программируемое вычислительное устройство, такое как однокристальный микрокомпьютер (SCM), программируемый логический контроллер (PLC), матрице логических элементов с эксплуатационным программированием (FPGA) или что-то подобное. В дополнительном варианте, периферический измерительный модуль 403 жестко соединен с силовым модулем 301.
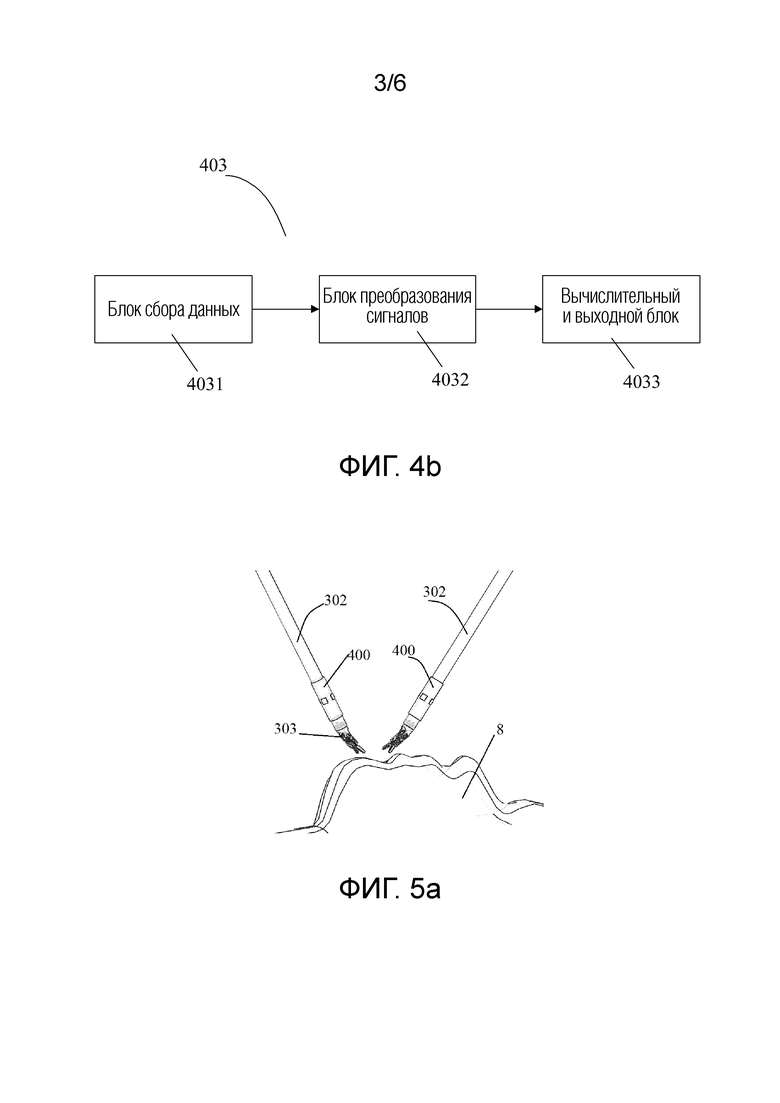
Фиг. 4b является структурной схемой периферического измерительного модуля в хирургическом инструменте в соответствии с вариантом осуществления настоящего изобретения. Как показано на фиг. 4b, периферический измерительный модуль 403 может включать в себя блок 4031 сбора данных, блок 4032 преобразования сигналов и вычислительный и выходной блок 4033, последовательно соединенные друг с другом. В частности, периферический измерительный модуль 403 может действовать следующим способом: сначала блок 4031 сбора данных получает электрические сигналы, выработанные чувствительными элементами 402; затем блок 4032 преобразования сигналов может преобразовывать электрические сигналы, полученные блоком 4031 сбора данных, путем выполнения их последовательной обработки, включающей в себя, но без ограничения, усиление, цифровую фильтрацию, детрендинг, удаление выбросов и т.п., и, наконец, вычислительный и выходной блок 4033 может выводить контактную силу, действующую на контактный конец хирургического инструмента 3 путем выполнения анализа и вычислений с преобразованными электрическими сигналами из блока 4032 преобразования сигналов и выдачи контактной силы, которая может быть либо одномерной, либо многомерной.
Фиг. 5a является схематическим изображением втулки 401, расположенной на стержне 302 в хирургическом инструменте в соответствии с вариантом осуществления настоящего изобретения, и фиг. 5b является схематическим, увеличенным, частичным изображением втулки 401 и стержня 302, показанных на фиг. 5a. Как показано на фиг. 5a и 5b, датчик 400 силы надевается на контактный конец стержня 302 в хирургическом инструменте 3 с помощью втулки 401. Чем ближе располагается втулка 401 к рабочему органу 303, тем легче можно узнать силу, действующую на контактный конец хирургического инструмента 3. В предпочтительном варианте, втулка 401 находится наравне с торцом контактного конца стержня 302 и жестко соединена с контактным концом при помощи посадки с натягом, вставки, склеивания или чего-то подобного. В качестве альтернативы, чтобы облегчить выполнение сборки или разборки, втулка может соединяться с контактным концом разъемно при помощи резьбового соединения, соединения-защелки, самофиксирующегося соединения или чего-то подобного.
Фиг. 6a является схематическим изображением втулки 401, которая не собрана со стержнем 302, в соответствии с вариантом осуществления настоящего изобретения. Как показано на фиг. 6a, в данном варианте осуществления, втулка 401 может быть, при необходимости, жестко размещена на стержне 302 по посадке с натягом. В этом случае, чувствительные элементы 402 не ограничены расположением на внешних поверхностях деформируемых элементов 4011, так как их также можно расположить на внутренних поверхностях деформируемых элементов 4011 (например, в выемках, сформированных во внутренних поверхностях деформируемых элементов 4011). Очевидно, что в данном варианте осуществления посадка с натягом, которая жестко соединяет втулку 401 со стержнем 302, может достигаться благодаря упругости самой втулки 401.
Фиг. 6b является схематическим изображением втулки 401, которая еще не собрана со стержнем 302 в соответствии с другим вариантом осуществления настоящего изобретения. Как показано на фиг. 6b, в данном варианте осуществления, втулка 401 может быть, при необходимости, разъемно установлена на стержне 302 по резьбовой посадке, при этом чувствительные элементы 402 предпочтительно располагаются на внешних поверхностях деформируемых элементов 4011. В частности, на внутренней поверхности втулки 401 может быть обеспечена внутренняя резьба, которая может формировать резьбовую посадку с внешней резьбой, сформированной на внешней поверхности стержня 302. Такое резьбовое соединение полезно при обеспечении отсутствия любого просвета между втулкой 401 и стержнем 302, который может негативно влиять на точность измерения силы. В случае резьбового соединения, для обеспечения надежности соединения, втулку 401 изготавливают, предпочтительно, из высокотвердого материала, например, углероволокна.
Фиг. 7a является схематическим изображением хирургического инструмента, который испытывает действие силы с одной стороны и деформирован, в соответствии с вариантом осуществления настоящего изобретения. В данном варианте осуществления, хирургический инструмент 3 последовательно содержит шарнир 304 вращения, шарнир 305 тангажа и шарнир 306 рыскания, которые допускают движения, соответственно, ротации (вращения вокруг собственной оси), тангажа и рыскания рабочего органа 303. В данном варианте осуществления, рабочий орган 303 включает в себя две откидных части (следовательно, рабочий орган является, например, ножницами). Соответственно, чтобы соответственно управлять соответствующей одной из откидных частей требуются два шарнира (306, 306') рыскания. Как показано на фиг. 7a, после приведения рабочего органа 303 в контакт с тканью тела, ткань тела будет действовать контактной силой 
Фиг. 7b является схемой, поясняющей анализ силы, действующей на контактный конец хирургического инструмента, и принцип измерения данной силы в соответствии с вариантом осуществления настоящего изобретения. Как показано на фиг. 7b, когда контактный конец хирургического инструмента 3 приводится в контакт с тканью тела, ткань тела будет действовать на хирургический инструмент 3 контактной силой 



Следует понимать, что, на фиг. 7b, который схематически показывает, как напрягается и деформируется контактный конец хирургического инструмента, для хирургического инструмента на его контактном конце можно задать координатную систему {q} с началом координат, расположенным, например, в точке, обозначенной A на фигуре, т.е. точке пересечения оси стержня 302 и оси вращения шарнира 305 тангажа в хирургическом инструменте. Координатная система {q} также содержит x-ось, которая перпендикулярна оси вращения шарнира 305 тангажа и совпадает с осью стержня 302 в начальной конфигурации, y-ось, продолжающуюся параллельно оси вращения шарнира 305 тангажа в хирургическом инструменте, и z-ось, которая перпендикулярна обеим вышеупомянутым осям и задается правилом правой руки. При этом, «начальная конфигурация» определяется как конфигурация, в которой рабочий орган 303 хирургического инструмента 3 продолжается прямолинейно вдоль направления оси стержня 302, причем дистальный конец располагается наиболее далеко от шарнира рыскания. Начало координат координатной системы {q} может быть точкой приложения эквивалентной результирующей силы
Когда втулка 401 деформируется под влиянием действующей силы (
В уравнении (1-1), 

Кроме того, информация о силе, прилагаемой стержнем 302 к втулке 401, содержит ее направление, которое является представлением направления оси чувствительности i-того чувствительного элемента в координатной системе {p}, и положение точки ее приложения, которое является представлением положения i-того чувствительного элемента в координатной системе {p}. Напряжение, измеренное чувствительным элементом, 402, т.е. действующая сила, прилагаемая стержнем 302 к деформируемому элементу 4011 представляется в координатной системе {p} в форме:

В уравнении (1-2), 
 являются компонентами по осям координатной системы {p}; и
являются компонентами по осям координатной системы {p}; и 
Кроме того, направление и положение точки приложения силы, прилагаемой стержнем 302 к втулке 401, можно представить в координатной системе {q} в форме:
В уравнении (1-3), является представлением позиции координатной системы {p} в координатной системе {q}.
В уравнении (1-4), 
Следует отметить, что, для обеспечения относительного взаимного расположения между втулкой 401 и стержнем 302 хирургического инструмента и, следовательно, между координатными системами {p} и {q}, на торце или поверхности втулки или на поверхности стержня 302 могут быть выгравированы или начертаны канавки или линии, чтобы облегчать совмещение во время сборки.
Напряжения, измеренные всеми чувствительными элементами, можно объединить в координатной системе {q}, что дает, в результате:
Как можно заметить из уравнения (1-5), эквивалентная результирующая сила контактной силы, действующей на контактный конец хирургического инструмента, равна  , и ее эквивалентный результирующий момент равен
, и ее эквивалентный результирующий момент равен  , где
, где 
Для повышения точности и надежности измерений, в способы измерений, практически применяемые в технике, можно иногда включать избыточность, т.е. повторяющиеся циклы измерений, которые вводят с определенным расчетом. В соответствии с настоящим изобретением, количество избыточных сил по некоторому направлению можно интерпретировать как число раз измерения силы датчиком силы вдоль пути передачи. Аналогично, количество избыточных моментов в некотором направлении можно интерпретировать как число раз измерения момента датчиком силы вдоль пути передачи. Конкретный пример будет изложен ниже для подробного описания конструкции датчика силы, закрепленного на втулке, и способа его применения для измерения силы.
Фиг. 8 является схемой, поясняющей принципы измерения сил трехмерным датчиком силы в соответствии с вариантом осуществления настоящего изобретения. На фиг. 8 показаны координатные системы {q} и {p}, соответственно, для хирургического инструмента и втулки. Как отмечено выше, начало координат координатной системы {q} располагается в точке пересечения оси вращения шарнира вращения в хирургическом инструменте 3 (т.е. оси стержня 302) и оси вращения шарнира тангажа. Кроме того, x-ось координатной системы {q} задана как перпендикулярная оси вращения шарнира 305 тангажа и совпадает с осью стержня 302 в начальной конфигурации, y-ось задана как параллельная оси вращения шарнира тангажа, и z-ось задана правилом правой руки. При этом, «начальная конфигурация» определяется как конфигурация, в которой рабочий орган хирургического инструмента 3 продолжается прямолинейно вдоль направления оси стержня 302, причем дистальный конец располагается наиболее далеко от шарнира рыскания. Кроме того, координатная система {p} установлена на торце втулки 401.
Как показано на фиг. 8, углубленная часть, содержащаяся во втулке 401, включает в себя четыре деформируемых элемента 4011, которые равномерно размещены в окружном направлении. Датчик 400 силы включает в себя четыре чувствительных элемента 402, соответственно, обозначенных индексами 1-4 в последующем описании с целью различения между ними. В показанном примере, каждый из четырех чувствительных элементов 402 жестко установлен на внешней поверхности соответствующего одного из деформируемых элементов 4011, и все оси чувствительности четырех чувствительных элементов 402 продолжаются параллельно аксиальному направлению втулки 401.
Четыре чувствительных элемента располагаются со своими осями чувствительности, ориентированными в собственных направлениях, указанных как
где 
Аналогично, четыре чувствительных элемента 402 имеют соответствующие радиусы-вектора в координатной системе {p}, обозначенные 
где 


В соответствии с определением количества избыточных сил в некотором направлении, сделанным в соответствии с уравнением (1-5), в данном варианте осуществления, поскольку каждое из напряжений по x-оси измеряется только один раз во время его передачи, то 

Из данного уравнения (1-8), силу 


Как можно видеть из уравнения (1-9), расположение четырех чувствительных элементов 402 на датчике 400 силы делает возможным измерение силы по одному, двум или трем направлениям. В частности, когда
В соответствии с данным вариантом осуществления, необходимое, по меньшей мере, одномерное измерение силы можно обеспечить посредством, сначала, установления координат чувствительных элементов в координатной системе {q} и, затем, установления положения чувствительных элементов на втулке, на основании полученных координат. Когда требуется измерение одномерной контактной силы, y- и z-координаты чувствительных элементов можно установить равными нулю. Когда требуется измерение с большим числом размерностей, например, двух- или трехмерной силы, y- или z-координаты чувствительных элементов или координаты по обеим данным осям могут быть установлены равными ненулевым значениям. После этого, конструкцию втулки можно спроектировать в соответствии с требованиями так, чтобы любой нежелательный участок, который не предназначен для поддержки чувствительного элемента, удалялся механической обработкой, с формированием, тем самым, углубленной части с деформируемыми элементами 4011 для передачи силы, прилагаемой к поперечному сечению втулки.
Хотя принципы измерения датчика силы подробно описаны со ссылкой на вышеприведенные варианты осуществления, само собой разумеется, что настоящее изобретение включает в себя, но без ограничения, вышеупомянутые конфигурации, перечисленные ранее в описании, и предполагается, что любое изменение, внесенное в них, также должно быть в пределах объема охраны настоящего изобретения. В свете вышеприведенных вариантов осуществления, специалистами в данной области техники могут быть получены другие варианты осуществления.
Кроме того, датчик силы по данному варианту осуществления не ограничен измерением трехмерной силы (с компонентом силы по одному направлению и компонентами моментов по остальным двум направлениям), его можно также применить для измерения двумерной силы или даже шестимерной силы (с компонентами силы по трем направлениям и компонентами моментов по остальным трем направлениям). В случае измерения многомерной силы, число чувствительных элементов является, по меньшей мере, не меньше, чем число размерностей контактной силы. На практике, процесс проектирования датчика начинают с определения числа размерностей силы, подлежащей измерению. Если сила, подлежащая измерению, является n-мерной, то необходимо, по меньшей мере, n независимых чувствительных элементов. Затем, определяют окончательное уравнение измерения силы (например, уравнение (1-10)) с положениями и ориентациями чувствительных элементов в качестве неизвестных, и, исходя из направления силы, подлежащей измерению, определяют, как размещаются чувствительные элементы. Например, если сила, подлежащая измерению, направлена по x-оси, то чувствительные элементы можно с достаточным основанием разместить в положениях (с заданными координатами x, y, z) и ориентациях (с заданными 
В итоге, датчик силы по настоящему изобретению располагается на контактном конце хирургического инструмента и выполнен с возможностью измерения контактной силы, действующей на контактный конец. Более того, датчик силы снабжен втулкой, соединенной с хирургическим инструментом, и втулка обеспечивает, по меньшей мере, одно из следующих преимуществ:
Во-первых, между втулкой и механической конструкцией хирургического инструмента не возникает никакого просвета. Это способствует повышению точности измерений.
Во-вторых, для хирургической операции, требующей применения нескольких хирургических инструментов, специальный процесс калибровки может выполняться на каждом из хирургических инструментов, что устраняет влияние неодинаковости материала инструмента на измерение.
В-третьих, на разных хирургических инструментах можно использовать такую втулку, которая передает деформации данных хирургических инструментов. По сравнению с чувствительными элементами, непосредственно закрепленными к контактным концам хирургических инструментов, применение чувствительных элементов с втулкой может исключить ошибки измерения, которые могут возникать из-за несогласованности измерений между разными чувствительными элементами на разных хирургических инструментах, что помогает обеспечить более высокую степень достоверности и точности измерений.
В-четвертых, соединение чувствительных элементов с хирургическими инструментами с помощью втулок может избавить от необходимости удаления чувствительных элементов в отходы вместе с хирургическими инструментами. Хирургические инструменты являются расходными материалами, тогда как чувствительные элементы допускают многократное использованием. Очевидно, удаление хирургического инструмента в отходы вместе с датчиками на практике не выгодно экономически и приведет к повышению стоимости эксплуатации.
В предпочтительном варианте осуществления настоящего изобретения, множество чувствительные элементы располагается на деформируемых элементах втулки предварительно заданным образом, и каждый из чувствительных элементов имеет предварительно заданные координаты в координатной системе для хирургического инструмента. Исходя из предварительно заданных координат, можно определить положения чувствительных элементов на деформируемых элементах, что допускает, по меньшей мере, одномерное измерение контактной силы, действующей на контактный конец хирургического инструмента. Это подразумевает облегчение и упрощение способа измерения контактной силы, по которому измерение, по меньшей мере, одномерной контактной силы обеспечивается только посредством настройки положений чувствительного элемента относительно координатной системы для хирургического инструмента.
В настоящем изобретении дополнительно предлагается роботизированная хирургическая система. Роботизированная хирургическая система включает в себя ведомый манипулятор. Ведомый манипулятор включает в себя роботизированную руку и вышеописанный хирургический инструмент. Хирургический инструмент разъемно соединен с контактным концом роботизированной руки и может приводиться ей в движение вокруг удаленного центра движения (RCM). Роботизированная хирургическая система включает в себя также задающее устройство и блок управления. Задающее устройство включает в себя индикатор силы для представления информации о контактной силе, действующей на рабочий орган. Блок управления соединен с возможностью информационного обмена как с задающим устройством, так и с ведомым манипулятором и выполнен с возможностью получения информации о контактной силе, действующей на рабочий орган, из датчика силы хирургического инструмента и передачи информации в индикатор силы.
Индикатор силы может быть системой 5 визуализации, выполненной с возможностью отображения информации о силе, действующей на хирургический инструмент 3. В качестве альтернативы, индикатор силы может быть задающим манипулятором 7, оборудованным электродвигателем. Задающий манипулятор 7 выполнен с возможностью, после получения информации о силе, действующей на хирургический инструмент 3, воздействия усилием реакции на руку хирурга таким образом, что хирург может непосредственно «ощущать» силу, действующую на хирургический инструмент 3.
Ведомый манипулятор включает в себя также эндоскоп и держатель эндоскопа, разъемно соединенную с эндоскопом. Чтобы облегчить хирургу наблюдение за тем, как происходит напряжение хирургического инструмента в поле зрения эндоскопа, вышеописанное измерение контактной силы на контактном конце хирургического инструмента необходимо преобразовывать в координатную систему для эндоскопа. При этом, состояние контактной силы, действующей на контактный конец хирургического инструмента, может наблюдаться в поле зрения эндоскопа (в виде силы
Посредством преобразования эквивалентной результирующей силы 
где
является радиусом-вектором из координатной системы {q} в координатную систему {e} (т.е. положением контактного конца хирургического инструмента относительно контактного конца эндоскопа);
В данном варианте осуществления, начало координат координатной системы {e} располагается в центре поля зрения эндоскопа. В частности, начало координат координатной системы {e} может располагаться на контактном конце эндоскопа 4. Координатная система {e} также имеет x-ось, y-ось и z-ось. X-ось координатной системы {e} задана как направленная нормально к поверхности объектива эндоскоп 4, соединенного с роботизированной рукой 2. В дополнительном варианте, положительное направление x-оси координатной системы {e} может направляться от проксимального конца эндоскопа 4 (где он соединен с роботизированной рукой 2) к контактному концу эндоскопа. Y-ось координатной системы {e} является перпендикулярной x-оси данной системы, и, аналогично, направление z-оси координатной системы {e} может быть задано правилом правой руки. В более предпочтительном варианте, в случае, когда эндоскоп является стереоскопическим, y-ось координатной системы {e} задана линией, соединяющей центры поверхностей двух линз эндоскопа. При этом, поскольку координатную систему {e} можно установить любым подходящим способом, известным в технике, специалистам в данной области техники будет понятно, в свете приведенного здесь раскрытия, как следует устанавливать координатную систему {e} на контактном конце эндоскопа и координатную систему {q} на контактном конце хирургического инструмента, и как следует описывать, в координатной системе {e}, контактную силу
Представленное выше описание является описанием всего лишь немногих предпочтительных вариантов осуществления настоящего изобретения и ни в каком смысле не ограничивает его объема. Все изменения и модификации, выполненные специалистами среднего уровня в данной области техники на основе вышеприведенных идей, входят в пределы объема, определенного прилагаемой формулой изобретения.


Группа изобретений относится к медицине, а именно к хирургическим инструментам и роботизированным хирургическим системам. Инструмент содержит механическую конструкцию, втулку и датчик силы. Механическая конструкция содержит стержень и рабочий орган, соединенный с контактным концом стержня. Втулка жестко или разъемно надета на контактный конец стержня. Датчик силы содержит чувствительный элемент и периферический измерительный модуль, соединенный с чувствительным элементом. Чувствительный элемент расположен на втулке и выполнен с возможностью получения информации о деформации втулки. Периферический измерительный модуль выполнен с возможностью получения напряжения, измеренного чувствительным элементом, на основании информации о деформации и получения как эквивалентной результирующей силы, так и эквивалентного результирующего момента действующей силы, прилагаемой стержнем к втулке, на основе напряжения, измеренного чувствительным элементом, положения чувствительного элемента и направления оси чувствительности чувствительного элемента, с получением, тем самым, контактной силы, действующей на рабочий орган хирургического инструмента. Хирургическая система содержит ведомый манипулятор, содержащий роботизированную руку и хирургический инструмент. Роботизированная рука содержит контактный конец, разъемно соединенный с хирургическим инструментом. Роботизированная рука выполнена с возможностью приведения хирургического инструмента в движение вокруг удаленного центра движения. Достигается повышение точности измерения контактной силы на контактном конце хирургического инструмента. 2 н. и 20 з.п. ф-лы, 12 ил.
1. Хирургический инструмент, содержащий механическую конструкцию, втулку и датчик силы;
при этом механическая конструкция содержит стержень и рабочий орган, соединенный с контактным концом стержня;
втулка жестко или разъемно надета на контактный конец стержня;
датчик силы содержит, по меньшей мере, один чувствительный элемент и периферический измерительный модуль, соединенный с чувствительным элементом, причем чувствительный элемент расположен на втулке и выполнен с возможностью получения информации о деформации втулки;
при этом периферический измерительный модуль выполнен с возможностью получения напряжения, измеренного чувствительным элементом, на основании информации о деформации, полученной чувствительным элементом, и получения как эквивалентной результирующей силы, так и эквивалентного результирующего момента действующей силы, прилагаемой стержнем к втулке, на основе напряжения, измеренного чувствительным элементом, положения чувствительного элемента и направления оси чувствительности чувствительного элемента, с получением, тем самым, контактной силы, действующей на рабочий орган хирургического инструмента.
2. Хирургический инструмент по п. 1, в котором втулка содержит углубленную часть, проходящую в окружном направлении, при этом углубленная часть содержит деформируемые элементы и отверстия, каждое из которых расположено между соседними двумя деформируемыми элементами, причем деформируемые элементы выполнены с возможностью соединения верхней секции втулки выше углубленной части с нижней секцией втулки ниже углубленной части,
при этом, по меньшей мере, один чувствительный элемент расположен на деформируемых элементах и выполнен с возможностью измерения напряжения на деформируемых элементах.
3. Хирургический инструмент по п. 2, в котором деформируемые элементы имеют модуль упругости, который не превышает модуль упругости стержня.
4. Хирургический инструмент по п. 2, в котором каждый из деформируемых элементов имеет внутреннюю поверхность, внешнюю поверхность и боковые поверхности, при этом, по меньшей мере, один чувствительный элемент расположен на внутренних поверхностях, внешних поверхностях или боковых поверхностях деформируемых элементов.
5. Хирургический инструмент по п. 2, в котором углубленная часть расположена вокруг средней по оси части втулки.
6. Хирургический инструмент по п. 1, в котором ось чувствительности чувствительного элемента расположена параллельно или перпендикулярно аксиальному направлению втулки.
7. Хирургический инструмент по п. 1, в котором втулка жестко надета на контактный конец стержня при помощи склеивания, посадки с натягом или вставки.
8. Хирургический инструмент по п. 1, в котором втулка разъемно надета на контактный конец стержня при помощи резьбового соединения, соединения-защелки или самофиксирующегося соединения.
9. Хирургический инструмент по п. 1, в котором втулка имеет один конец, расположенный наравне с контактным концом стержня.
10. Хирургический инструмент по п. 1, в котором периферический измерительный модуль содержит, последовательно соединенные с возможностью информационного обмена друг с другом, блок сбора данных, блок преобразования сигналов и вычислительный и выходной блок; при этом блок сбора данных выполнен с возможностью получения выходных сигналов из чувствительного элемента, блок преобразования сигналов выполнен с возможностью преобразования выходных сигналов из чувствительного элемента и вычислительный и выходной блок выполнен с возможностью выполнения вычисления на основании преобразованных сигналов, чтобы получать контактную силу на рабочем органе.
11. Хирургический инструмент по п. 2, в котором напряжение, измеренное чувствительным элементом, определяется формулой:

где i означает i-й чувствительный элемент; ƒi означает напряжение, измеренное i-м чувствительным элементом; εi означает деформацию деформируемого элемента, на котором располагается i-й чувствительный элемент, по оси чувствительности i-го чувствительного элемента; g(⋅) означает функцию, описывающую зависимость между напряжением и деформацией; ki означает коэффициент зависимости деформации от напряжения деформируемого элемента, на котором располагается i-й чувствительный элемент, по оси чувствительности i-го чувствительного элемента и ƒ(εi) является составляющей нелинейной компенсации для напряжения и деформации.
12. Хирургический инструмент по п. 11, в котором:
контактная сила содержит эквивалентную результирующую силу Fq и эквивалентный результирующий момент Mq;
при этом периферический измерительный модуль выполнен с возможностью установления координатной системы {p} для расположенной на нем втулки, координатной системы {q} для хирургического инструмента на его контактном конце и дескрипторов положения и позиции координатной системы {p} в координатной системе {q};
периферический измерительный модуль дополнительно выполнен с возможностью получения дескриптора напряжения, измеренного чувствительным элементом, в координатной системе {q} на основании дескриптора позиции координатной системы {p} в координатной системе {q}, дескриптора направления оси чувствительности чувствительного элемента в координатной системе {p} и напряжения, измеренного чувствительным элементом, с получением, тем самым, эквивалентной результирующей силы Fq;
периферический измерительный модуль дополнительно выполнен с возможностью получения дескриптора положения чувствительного элемента в координатной системе {q} на основании дескрипторов положения и позиции координатной системы {p} в координатной системе {q} и дескриптора положения чувствительного элемента в координатной системе {p}; и
периферический измерительный модуль дополнительно выполнен с возможностью получения дескриптора момента силы, действующей на втулку в координатной системе {q} на основании дескриптора напряжения, измеренного чувствительным элементом, в координатной системе {q}, с получением, тем самым, эквивалентного результирующего момента Mq.
13. Хирургический инструмент по п. 12, в котором
дескриптор напряжения, измеренного чувствительным элементом, в координатной системе {p} определяется формулой:

где ei является единичным вектором, означающим дескриптор направления оси чувствительности i-го чувствительного элемента в координатной системе {p}; ƒi обозначает напряжение, измеренное i-м чувствительным элементом; ƒxi, ƒyi, ƒzi обозначают компоненты ƒi по осям координатной системы {p} и exi, eyi, ezi обозначают компоненты ei по осям координатной системы {p}.
14. Хирургический инструмент по п. 13, в котором
дескриптор напряжения, измеренного чувствительным элементом, в координатной системе {q} определяется формулой:
где ƒi означает дескриптор напряжения, измеренного i-м чувствительным элементом в координатной системе {q}, и qR означает дескриптор позиции координатной системы {p} в координатной системе {q}, при этом
эквивалентная результирующая сила Fq определяется формулой:
где diag(•) означает диагональную матрицу с элементами в векторе • в виде диагональных элементов и nx, ny, nz означают количества избыточных сил по x-оси, y-оси и z-оси соответственно.
15. Хирургический инструмент по п. 12 или 13, в котором
дескриптор положения чувствительного элемента в координатной системе {q} определяется формулой:
 ,
,
где ri означает дескриптор положения i-го чувствительного элемента в координатной системе {q}; pri означает дескриптор положения i-го чувствительного элемента в координатной системе {p}; qR означает дескриптор позиции координатной системы {p} в координатной системе {q} и rp означает дескриптор положения координатной системы {p} в координатной системе {q}.
16. Хирургический инструмент по п. 15, в котором
эквивалентный результирующий момент Mq определяется формулой:
 ,
,
где nx', ny', nz' означают количества избыточных моментов в направлениях x-оси, y-оси и z-оси соответственно.
17. Хирургический инструмент по п. 13, в котором:
углубленная часть содержит четыре деформируемых элемента, которые расположены в окружном направлении; датчик силы содержит четыре чувствительных элемента, расположенных, каждый, на внешней поверхности соответствующего одного из деформируемых элементов; все дескрипторы e1, e2, e3, e4 направлений осей чувствительности четырех чувствительных элементов в координатной системе {p} равны (1,0,0)T;
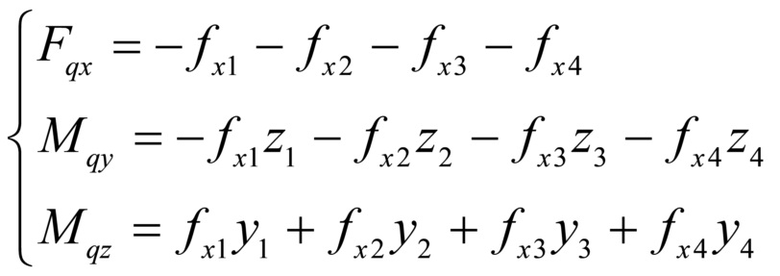
при этом дескрипторы напряжения, измеренного четырьмя чувствительными элементами, в координатной системе {q} даются в форме:
 ,
,
где ƒx1, ƒx2, ƒx3, ƒx4 соответственно означают напряжение, измеренное с первого по четвертый чувствительными элементами в направлении x-оси координатной системы {q}; и
эквивалентная результирующая сила Fq определяется формулой:

18. Хирургический инструмент по п. 17, в котором:
qR, дескриптор позиции координатной системы {p} в координатной системе {q}, является единичной матрицей; и
положения чувствительных элементов измеряются как соответствующие центральные положения, которые описываются в координатной системе {q} в форме:
 ,
,
где pr1, pr2, pr3, pr4 являются дескрипторами центральных положений четырех чувствительных элементов в координатной системе {p}; rp означает дескриптор положения координатной системы {p} в координатной системе {q}; x1, x2, x3, x4 являются координатами по x-оси центральных положений с первого по четвертый чувствительных элементов в координатной системе {q}; y1, y2, y3, y4 являются координатами по y-оси центральных положений с первого по четвертый чувствительных элементов в координатной системе {q}; z1, z2, z3, z4 являются координатами по z-оси центральных положений с первого по четвертый чувствительных элементов в координатной системе {q} и r1, r2, r3, r4 являются дескрипторами центральных положений с первого по четвертый чувствительных элементов в координатной системе {q}.
19. Хирургический инструмент по п. 18, в котором
эквивалентный результирующий момент Mq определяется формулой:

20. Роботизированная хирургическая система, содержащая ведомый манипулятор, содержащий:
роботизированную руку; и
хирургический инструмент по любому из пп. 1-19,
причем роботизированная рука содержит контактный конец, разъемно соединенный с хирургическим инструментом, и роботизированная рука выполнена с возможностью приведения хирургического инструмента в движение вокруг удаленного центра движения.
21. Роботизированная хирургическая система по п. 20, дополнительно содержащая задающее устройство и блок управления, при этом задающее устройство содержит индикатор силы;
причем блок управления соединен с возможностью информационного обмена как с задающим устройством, так и с ведомым манипулятором; блок управления выполнен с возможностью получения информации о контактной силе, действующей на рабочий орган, от датчика силы хирургического инструмента и передаче информации в индикатор силы, причем индикатор силы выполнен с возможностью представления информации о контактной силе, действующей на рабочий орган.
22. Роботизированная хирургическая система по п. 20 или 21, в которой ведомый манипулятор дополнительно содержит:
эндоскоп; и
держатель эндоскопа, разъемно соединенный с эндоскопом;
при этом периферический измерительный модуль хирургического инструмента выполнен с возможностью установления координатной системы {p} для втулки, координатной системы {q} для хирургического инструмента и координатной системы {e} для эндоскопа и получения, из матрицы eR, описывающей поворот из координатной системы {q} в координатную систему {e} и радиуса-вектора er=(rx ry rz)T из координатной системы {q} в координатную систему {e}, дескриптора контактной силы, действующей на рабочий орган в координатной системе {e}, в виде:
где eF означает результирующую силу в координатной системе {e}; eM означает результирующий момент в координатной системе {e}; S(er) означает антисимметричную матрицу, соответствующую вектору er; Fq означает эквивалентную результирующую силу контактной силы, действующей на рабочий орган; Mq означает эквивалентный результирующий момент контактной силы, действующей на рабочий орган; и
| US 20160216167 A1, 28.07.2016 | |||
| Способ определения режущих свойств инструментальных материалов | 1957 |
|
SU122326A1 |
| US 20090248038 A1, 01.10.2009 | |||
| US 20100094312 A1, 15.04.2010 | |||
| US 20060161136 A1, 20.07.2006. | |||

