Изобретение относится к авиационной промышленности, в частности к инициированию раскрытия парашютной системы при достижении заданных параметров нахождения парашютной системы.
Известен патент №22928 «Устройство М.И. Белобратова для расчековки ранца парашюта», кл. B64D 17/54, 2002г., в котором критерием инициирования раскрытия парашюта используют заданный промежуток времени. Однако данного одного критерия недостаточно для различных состояний атмосферных условий.
Известны технические решения по патентам №№ 1793646, 2033946 «Устройства для раскрытия парашюта» кл. B64D 17/54, 1990г., 1992г. в которых критерием инициирования раскрытия парашюта являются заданная высота и показания анероидного механизма, в результате срабатывают системы рычажных механизмов открывающие замок парашюта.
Наиболее близким техническим решением является техническое решение по патенту № 2719700 «Электронный страхующий парашютный прибор», кл. B64D 17/54, 2019г., в котором критерием инициирования раскрытия парашюта является скорость падения парашюта и текущая высота нахождения парашюта, рассчитанные программным обеспечением микропроцессора посредством вычислительного устройства по замеренному значению текущего атмосферного давления.
Однако в данном техническом решении низкая точность инициирования, т.е. введение в действие исполнительного органа, из-за малого количества измеряемых параметров, характеризующих атмосферное состояние воздушного потока, в котором находится парашютная система.
Задачей, на решение которой направлено настоящее изобретение, является увеличение точности наступления начала момента инициирования раскрытия парашютной системы за счет точности определения не только положения, но и изменение состояния движения парашютной системы.
Технический результат, получаемый в результате использования предлагаемого технического решения заключается в том, что определяется не только динамика изменения текущих параметрических характеристик изменение атмосферного состояния вокруг парашютной системы в пространстве, но определяется вектор и величина вектора движения парашютной системы в пространстве, что в конечном итоге увеличивает безопасность приземления за счет исключения погрешностей вызванных постоянно меняющимся воздушным потоком.
Указанная задача решается, а технический результат достигается за счет того, что в электронном снаряжении для инициирования раскрытия парашютной системы, содержащем электронный микропроцессорный блок, с вычислительным устройством и герметичный ввод барометрического датчика давления, герметичный корпус блока соединен герметичным кабелем с корпусом блока индикации и управления и герметичным разъемом с корпусом исполнительного устройства, блок индикации и управления имеет цифровую панель и кнопку включения, а исполнительное устройство содержит нож, воспламенитель и отверстие, сквозь которое пропускают зачековочную петлю парашютной системы, характеризующееся тем, что микропроцессорный блок выполнен в виде микроконтроллера, внутри герметичного корпуса которого установлена плата с контактными выводами, взаимодействующими с кабелем и разъемом, с закрепленными на ней элементом питания, барометрическим датчиком, конденсатором и модулем инерциальной навигации, содержащим многоосевой акселерометр, при этом барометрический датчик снабжен фильтром, а внутренняя полость корпусов микроконтроллера и блока индикации и управления заполнены защитным составом, кабели выполнены с механической и электромагнитной защитой, исполнительное устройство выполнено в виде газогенератора, при этом корпус исполнительного устройства выполнен с двумя параллельными боковыми лысками со сквозным отверстием, а внутри корпуса рассоложен подвижный нож, а в поршневом торце ножа расположена герметичная камера с горючим материалом и электровоспламенителем.
Указанная задача решается, а технический результат достигается за счет того, что в способе инициирования раскрытия парашютной системы, включающем предварительное измерение и контроль давления воздуха места приземления и измерение и контроль текущего давления нахождения парашютной системы барометрическим датчиком, пересчет текущего давления на реальную скорость падения и текущую высоту нахождения парашютной системы, средствами, установленными в электронном приборе парашютной системы, снабженной микропроцессором, взаимодействующим посредством кабеля и разъема, с блоком индикации и управления и исполнительным устройством, каждый из которых заключен в отдельный корпус, характеризуется тем, что парашютную систему снабжают ранцем с донным и боковыми клапанами с отверстиями, микропроцессор выполняют в виде микроконтроллера, корпус исполнительного устройства выполняют с двумя параллельными боковыми лысками со сквозным отверстием, продольная ось которого перпендикулярна лыскам, а само исполнительное устройство размещают внутри ранца сбоку впритык к совместно собранным клапанам, отверстия которых располагают на одной оси со сквозным отверстием корпуса исполнительного устройства и сквозь которые пропускают зачековочную петлю, при этом парашютную систему дополнительно снабжают модулем инерциальной навигации, содержащим многоосевой акселерометр, выполненный с возможностью измерения линейных ускорений в нескольких осевых направлениях, данные которого используют для компенсации ошибок влияния случайного воздушного потока на текущие измерения давлений барометрическим датчиком и определения направления и величину вектора движения парашютной системы.
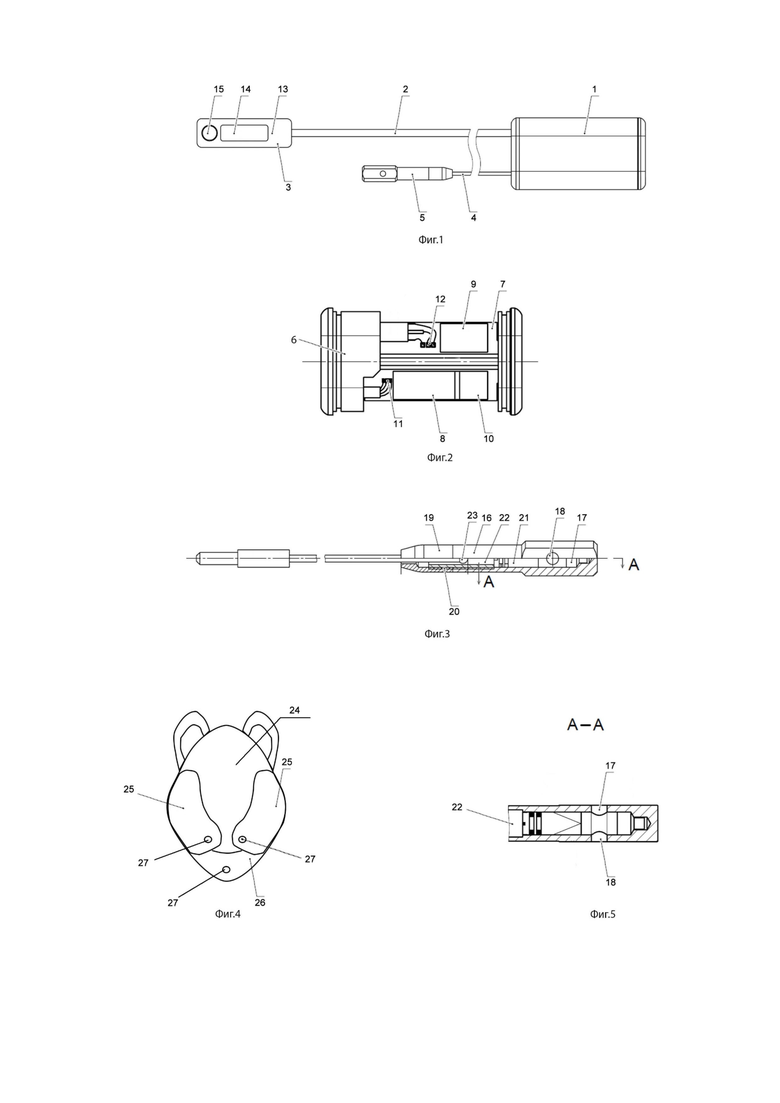
Предложенное изобретение поясняется следующими чертежами. На фиг. 1 - изображено электронное устройство для инициирования раскрытия парашюта, общий вид, на фиг. 2 – изображен микроконтроллерный блок с частично вырезанным корпусом, на фиг. 3 – изображен исполнительный блок, на фиг. 4 – общий вид ранца парашютной системы, на фиг. 5 изображен разрез А – А фиг. 3.
Электронное снаряжение для инициирования раскрытия парашютной системы (см. фиг.1) включает в себя микроконтроллерный блок 1, соединенный кабелем 2 с блоком 3 индикации и управления, и кабелем 4 с разъемом исполнительного устройства 5. Микроконтроллерный блок 1 включает корпус 6, в котором расположены электронное оборудование такое как плата 7 с элементом питания 8, барометрический датчик (на черт. не показано), конденсатор 9, модуль 10 инерциальной навигации, контактные выводы 11, 12, которые соединены с кабелем 2 и 4 соответственно. Корпус 6 выполнен герметичным, а внутренняя полость корпуса 6 заливается защитным составом – герметиком, например, эпоксидной или силиконовой смолами. Блок 3 индикации и управления содержит корпус 13 с экраном 14 и герметичную кнопку 15 включения взаимодействующими с платой 7 микроконтроллерного блока 1. Блок 3 индикации и управления может быть снабжен инфракрасным приемником для дистанционной настройки электронного снаряжения. Корпус 13 выполнен герметичным, а внутренняя полость корпуса 13 также заливается защитным составом – герметиком, например эпоксидной или силиконовой смолами. Кабели 2, 4 выполнены многожильными с механической и электромагнитной защитой. Барометрический датчик измеряет абсолютное давления воздуха и температуру окружающей атмосферы и взаимодействует с окружающей средой посредством защитного фильтрующего элемента, установленного на корпусе 6 микроконтроллерного блока 1. Конденсатор 9 обеспечивает гарантированное срабатывание исполнительного устройства 5. Модуль 10 инерциальной навигации содержит многоосевой акселерометр (на черт. не показан), который выполнен с возможностью измерения линейных ускорений в нескольких осевых направлениях, и основная задача его определить положение, направление и величину вектора движения парашютной системы в атмосфере. Данные от модуля 10 инерциальной навигации передаются на микроконтроллерный блок 1 и используются для компенсации ошибок текущих измерений давлений показаний барометрического датчика от мгновенного случайного состояния воздушного потока.
Исполнительное устройство 5 выполнено в виде газогенератора и содержит корпус 16. Корпус 16 выполнен двухступенчатым, одна из ступеней, большего диаметра, снабжена двумя параллельными боковыми лысками 17 и сквозным отверстием 18, продольная ось которого перпендикулярна лыскам 17. Вторая ступень выполнена в виде гильзы 19, жестко соединенного с корпусом 16 внутренней резьбовой втулкой 20, при этом образующая цилиндра наружного диаметра гильзы 19 находится в одной плоскости с лысками 17, т.е. диаметр гильзы 19 равен расстоянию между лысками 17. В корпусе 16 исполнительного устройства расположен подвижный нож 21, лезвие которого обращено к отверстию 18, а за поршневым торцом ножа расположена герметичная камера 22 с газовым горючим материалом и электровоспламенителем 23, взаимодействующим посредством кабеля 4 с микроконтроллером 1. Полости корпуса 16 и гильзы 19 герметизированы, а лезвие ножа снабжено защитой.
Предложенный способ инициирования раскрытия парашютной системы посредством электронного снаряжения для инициирования раскрытия парашютной системы реализуется следующим образом. При укладке в ранец 24, см. фиг 4, запасного парашюта на земле боковые клапаны 25 ранца и донный клапан 26 ранца после укладки запасного парашюта совместно соединяют посредством зачековочной петли, пропущенной сквозь соосно собранные отверстия 27 всех клапанов ранца т.е. формируют парашютную систему. С внутренней стороны ранца 24 к клапанам соосно с отверстиями 27 всех клапанов впритык располагают корпус 16 исполнительного устройства 5, взаимодействующего с микроконтроллерным блоком 1, размещенным отдельно в кармане ранца. Одна из лысок 17 корпус 16 примыкает к собранным клапанам, отверстия 27 которых располагают на одной оси со сквозным отверстием 18 корпуса исполнительного устройства 5 и сквозь которое также пропускают зачековочную петлю. Такое выполнение наружного диаметра патрубка 16 и корпуса 13 с параллельными лысками 14 обеспечивают надежное прилегание корпуса 13 исполнительного устройства к клапанов ранца, тем самым исключают возможность поворота-перекоса корпуса 13, а равенство диаметра гильзы 19 и расстояния между лысками обеспечивает беспрепятственное срабатывание расчековки клапанов ранца, чем обеспечивают надежность раскрытия самого парашюта.
Барометрический датчик измеряет абсолютное давления воздуха и температуру окружающей атмосферы и взаимодействует с окружающей средой посредством защитного фильтрующего элемента, установленного на корпусе 6 микроконтроллерного блока 1. Конденсатор обеспечивает гарантированное срабатывание исполнительного устройства 5.
Парашютную систему дополнительно снабжают модулем 10 инерциальной навигации, содержащим многоосный акселерометр, выполненный с возможностью измерения линейных ускорений в нескольких осевых направлениях, данные от которого используют для компенсации ошибок влияния случайного воздушного потока на текущие измерения давлений барометрическим датчиком и определения направления и величины вектора движения парашютной системы.
Модуль 10 инерциальной навигации содержит многоосевой акселерометр, который выполнен с возможностью измерения линейного ускорения в трех плоскостях, и основная задача его определить положение и направление вектора движения парашютной системы воздухе. Данные от модуля инерциальной навигации передаются на микроконтроллерный блок 1 и используются для компенсации влияния текущих измерений показаний барометрического датчика в мгновенно меняющемся и не характерном состоянии воздушного потока в текущий момент нахождения парашютной системы. Микроконтроллерный блок 1 на основе показаний барометрического датчика давления и обработки данных от модуля 10 инерциальной навигации вычисляет текущую высоту, фиксирует количество использования парашютной системы, сохраняет подробную информацию о полетах, осуществляет контроль уровня заряда батареи, диагностирует состояние целостности соединительных проводов и разъемов, информирует о необходимости проведения очередной поверки и обслуживания парашютной системы, а также подает команду на ввод в действие исполнительного устройства 5. Микроконтроллер 1 обрабатывает и пересчитывает полученные данные в реальную относительную вертикальную скорость падения и в реальную относительную высоту нахождения парашютной системы, сопоставляет с минимально первоначально - заданными параметрами и их совпадение является критерием срабатывания электронного снаряжения для инициирования раскрытия парашютной системы.
Команда от микроконтроллерного блока 1 посредством кабеля 4 поступает на исполнительное устройство 5, а именно на электровоспламенитель 23 герметичной камеры 22 с газовым горючим материалом, в результате чего происходит воспламенение газа и резкое увеличение давления газов на поршневой торец ножа 21, нож под давлением перемещается к отверстию 18 освобождается от защиты и перерубает зачековочную петлю. При этом клапаны 25, 26 мгновенно расходятся, так как при укладывании парашюта клапаны 25, 26 соединяются под некоторым напряжением, парашют освобождается и под силой тяжести и благодаря воздушному потоку и скорости падения парашютной системы парашют раскрывается.
Предложенное электронное снаряжение для инициирования раскрытия парашютной системы благодаря использованию микроконтроллерного блока и особенностям выполнения исполнительного устройства обеспечивает надежное раскрытие ранца парашютной системы.
Дополнительное использование модуля инерциальной навигации, снабженного многоосевым акселерометром, выполненным с возможностью измерения линейных ускорений в нескольких осевых направлениях, данные которого используют для компенсации влияния показаний текущих измерений давлений барометрическим датчиком от случайных и кратковременных изменений состояния атмосферы и определения направление и величины вектора движения парашютной системы, значительно повышает точность введение в действие исполнительного устройства, а значит выбор необходимого момента раскрытия парашютной системы.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОННАЯ ПАРАШЮТНАЯ СТРАХУЮЩАЯ СИСТЕМА | 2020 |
|
RU2741151C1 |
| ЭЛЕКТРОННЫЙ СТРАХУЮЩИЙ ПАРАШЮТНЫЙ ПРИБОР | 2019 |
|
RU2719700C1 |
| ПАРАШЮТНАЯ СИСТЕМА | 2024 |
|
RU2827124C1 |
| УСТРОЙСТВО ДЛЯ РАСКРЫТИЯ ПАРАШЮТА | 1992 |
|
RU2040440C1 |
| АВТОМАТИЗИРОВАННАЯ ПАРАШЮТНАЯ СИСТЕМА ДОСТАВКИ ГРУЗОВ | 2021 |
|
RU2761675C1 |
| ПАРАШЮТНАЯ СИСТЕМА | 2024 |
|
RU2840452C1 |
| ПАРАШЮТНАЯ СИСТЕМА ДЛЯ ДЕСАНТИРОВАНИЯ | 2024 |
|
RU2840304C1 |
| МОДУЛЬНАЯ ИНФОРМАЦИОННАЯ СИСТЕМА ПАРАШЮТИСТА | 2018 |
|
RU2681241C1 |
| УСТРОЙСТВО ДЛЯ РАСКРЫТИЯ ПАРАШЮТА | 1991 |
|
RU2024420C1 |
| УПРАВЛЯЕМАЯ ПАРАШЮТНАЯ СИСТЕМА | 1996 |
|
RU2111898C1 |
Группа изобретений относится к электронному снаряжению и способу для инициирования раскрытия парашютной системы. Электронное снаряжение содержит электронный микропроцессорный блок, блок индикации и управления, исполнительное устройство. Микропроцессорный блок содержит корпус, внутри которого расположена плата с элементом питания, барометрический датчик, конденсатор, модуль инерциальной навигации с многоосевым акселерометром. Исполнительное устройство выполнено в виде газогенератора и содержит герметичную камеру, заполненную газовым воспламенительным материалом, подвижный нож, электровоспламенитель. Для инициирования раскрытия парашютной системы производят измерение давления воздуха в месте приземления и его контроль в процессе полета, вычисляют реальную скорость падения и текущую высоту нахождения и направление и величину вектора движения парашютной системы. При совпадении измеренных данных с первоначально заданными минимальными значениями подают команду для инициирования раскрытия парашютной системы. Обеспечивается повышение безопасности приземления. 2 н.п. ф-лы, 5 ил. 
1. Электронное снаряжение для инициирования раскрытия парашютной системы, содержащее электронный микропроцессорный блок с вычислительным устройством и герметичный ввод барометрического датчика давления, герметичный корпус блока соединен герметичным кабелем с корпусом блока индикации и управления и герметичным разъемом с корпусом исполнительного устройства, блок индикации и управления имеет цифровую панель и кнопку включения, а исполнительное устройство содержит нож, воспламенитель и отверстие, сквозь которое пропускают зачековочную петлю парашютной системы, отличающееся тем, что микропроцессорный блок выполнен в виде микроконтроллера, внутри герметичного корпуса которого установлена плата с контактными выводами, взаимодействующими с кабелем и разъемом, с закрепленными на ней элементом питания, барометрическим датчиком, конденсатором и модулем инерциальной навигации, снабженным многоосевым акселерометром, при этом барометрический датчик снабжен фильтром, а внутренняя полость корпусов микроконтроллера и блока индикации и управления заполнены защитным составом, кабели выполнены с механической и электромагнитной защитой, исполнительное устройство выполнено в виде газогенератора, при этом корпус исполнительного устройства выполнен с двумя параллельными боковыми лысками со сквозным отверстием, а внутри корпуса расположен подвижный нож, а в поршневом торце ножа расположена герметичная камера с горючим материалом и электровоспламенителем.
2. Способ инициирования раскрытия парашютной системы, включающий предварительное измерение и контроль давления воздуха места приземления и измерение и контроль текущего давления нахождения парашютной системы барометрическим датчиком, пересчет текущего давления на реальную скорость падения и текущую высоту нахождения парашютной системы средствами, установленными в электронном приборе парашютной системы, снабженной микропроцессорным блоком, взаимодействующим посредством кабеля и разъема с блоком индикации и управления и исполнительным устройством, каждый из которых заключен в отдельный корпус, отличающийся тем, что парашютную систему снабжают ранцем с донным и боковыми клапанами с отверстиями, микропроцессор выполняют в виде микроконтроллерного блока, корпус исполнительного устройства выполняют с двумя параллельными боковыми лысками со сквозным отверстием, продольная ось которого перпендикулярна лыскам, а само исполнительное устройство размещают внутри ранца сбоку впритык к совместно собранным клапанам, отверстия которых располагают на одной продольной оси со сквозным отверстием корпуса исполнительного устройства и сквозь которые пропускают зачековочную петлю, при этом парашютную систему дополнительно снабжают модулем инерциальной навигации, содержащим многоосевой акселерометр, выполненный с возможностью измерения линейных ускорений в нескольких осевых направлениях, данные от которого используют для компенсации ошибок влияния случайного воздушного потока на текущие измерения давлений барометрическим датчиком и определения направления и величины вектора движения парашютной системы.
| ЭЛЕКТРОННЫЙ СТРАХУЮЩИЙ ПАРАШЮТНЫЙ ПРИБОР | 2019 |
|
RU2719700C1 |
| Автомат Для раскрытия парашюта | 1952 |
|
SU139195A1 |
| US 20080021646 A1 24.01.2008 | |||
| CN 106428575 B, 21.05.2019 | |||
| US 9297650 B2, 29.03.2016. | |||

