Область техники, к которой относится изобретение
[0001]
Настоящее изобретение относится к способу помощи при вождении и устройству помощи при вождении.
УРОВЕНЬ ТЕХНИКИ
[0002]
Известно обычное навигационное устройство, которое изменяет время указания смены полосы движения в соответствии с накопленными элементами информации о дорожном движении, когда транспортному средству необходимо сменить полосу движения, чтобы войти на рекомендуемый маршрут через точку ветвления (см. Патентный документ 1).
СПИСОК ЦИТИРОВАННЫХ ИСТОЧНИКОВ
ПАТЕНТНАЯ ЛИТЕРАТУРА
[0003]
Патентный документ 1: Публикация нерассмотренной заявки на патент Японии № 2009-47491.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
ТЕХНИЧЕСКАЯ ПРОБЛЕМА
[0004]
При движении по участку дороги с двумя полосами движения, на котором одна из двух смежных полос движения ведет к ответвлению дороги, а другая ведёт к главной дороге, транспортное средство может быть способно сменить полосу движения в точке разветвления для съезда на ответвление дороги не только из полосы движения, ведущей к ответвлению дороги после прохождения через точку разветвления, но также и из полосы движения, относящейся к главной дороге, после прохождения через точку разветвления. Когда транспортное средство намеревается выполнить съезд на ответвление дороги в точке разветвления, навигационное устройство, раскрытое в патентном документе 1, может определить в качестве рекомендуемого маршрута не только полосу движения, разветвляющуюся на ответвление дороги через точку разветвления, но также и полосу движения, относящуюся к главной дороге после прохождения точки разветвления, но также позволяющую транспортному средству съехать на ответвление дороги в точке разветвления. Если транспортное средство движется по полосе движения, определенной в качестве рекомендованного маршрута, относящейся к главной дороге после прохождения точки разветвления, транспортное средство не может быть надлежащим образом направлено в разветвляющуюся полосу движения для плавного съезда на ответвление дороги через точку разветвления.
[0005]
Для решения вышеупомянутых проблем уровня техники настоящее изобретение предусматривает способ помощи при вождении и устройство помощи при вождении, способные на участке дороги, на котором одна из двух смежных полос движения на главной дороге разветвляется на ответвление дороги через точку разветвления, а другая полоса движения относится к главной дороге после прохождения через точку разветвления, ведущую транспортное средство на съезд на ответвление дороги надлежащим образом.
РЕШЕНИЕ ПРОБЛЕМЫ
[0006]
Согласно аспекту настоящего изобретения на участке дороги, на котором одна из двух смежных полос на главной дороге ответвляется на ответвление дороги через точку разветвления, а другая полоса движения относится к главной дороге после прохождения через точку разветвления, транспортное средство, движущееся по полосе движения, относящейся к главной дороге, после прохождения точки разветвления направляется в полосу движения, ответвляющуюся на ответвление дороги через точку разветвления, когда транспортное средство достигает точки в пределах заданного расстояния от точки разветвления.
ПОЛЕЗНЫЕ ЭФФЕКТЫ
[0007]
Настоящее изобретение может обеспечить способ помощи при вождении и устройство помощи при вождении, способные на участке дороги, на котором одна из двух смежных полос движения на главной дороге ответвляется на ответвление дороги через точку разветвления, а другая полоса движения относится к главной дороге после прохождения через точку разветвления, приводя транспортное средство к съезду на ответвление дороги надлежащим образом.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0008]
Фиг.1 является блок-схемой, иллюстрирующей пример устройства помощи при вождении согласно варианту осуществления настоящего изобретения;
Фиг.2 является принципиальной схемой, иллюстрирующей пример способа помощи при вождении согласно варианту осуществления настоящего изобретения;
Фиг.3А является принципиальной схемой, иллюстрирующей пример участка дороги, включающего в себя ответвление дороги от главной дороги;
Фиг.3B является принципиальной схемой, иллюстрирующей информацию о пригодности бокового съезда на маршрут на участке дороги, проиллюстрированном на фиг. 3A;
Фиг.4А является принципиальной схемой, иллюстрирующей пример участка дороги, включающего в себя ответвление дороги, ответвляющееся от главной дороги;
Фиг.4B является принципиальной схемой, иллюстрирующей информацию о пригодности бокового съезда на маршрут на участке дороги, проиллюстрированном на фиг. 4A;
Фиг.5А является принципиальной схемой, иллюстрирующей пример участка дороги, включающего в себя ответвление дороги, ответвляющееся от главной дороги;
Фиг.5B является принципиальной схемой, иллюстрирующей информацию о пригодности бокового съезда на маршрут на участке дороги, проиллюстрированном на фиг. 5A;
Фиг.6А является принципиальной схемой, иллюстрирующей информацию о пригодности бокового съезда на маршрут и информацию о пригодности бокового съезда не на маршрут на участке дороги, проиллюстрированном на фиг. 4A;
Фиг.6B является принципиальной схемой, иллюстрирующей информацию о пригодности бокового съезда на маршрут и информацию о пригодности бокового съезда не на маршрут на участке дороги, проиллюстрированном на фиг. 5A;
Фиг.7 является принципиальной схемой, иллюстрирующей пример способа управления транспортным средством согласно варианту осуществления настоящего изобретения;
Фиг.8А является принципиальной схемой, иллюстрирующей пример способа представления навигационной информации в соответствии с вариантом осуществления настоящего изобретения;
Фиг.8B является принципиальной схемой, иллюстрирующей пример способа представления навигационной информации согласно варианту осуществления настоящего изобретения;
Фиг.9 является блок-схемой, иллюстрирующей пример способа помощи при вождении в соответствии с вариантом осуществления настоящего изобретения;
Фиг.10 является блок-схемой, иллюстрирующей пример процесса формирования направляющей информации в соответствии с вариантом осуществления настоящего изобретения;
Фиг.11А является принципиальной схемой, иллюстрирующей пример участка дороги, включающего в себя ответвление дороги, ответвляющееся от главной дороги;
Фиг.11B является принципиальной схемой, иллюстрирующей информацию о пригодности бокового съезда на маршрут на участке дороги, проиллюстрированном на фиг. 11А;
Фиг.12А является принципиальной схемой, иллюстрирующей пример участка дороги, включающего в себя ответвление дороги, ответвляющееся от главной дороги;
Фиг.12B является принципиальной схемой, иллюстрирующей информацию о о пригодности бокового съезда на маршрут на участке дороги, проиллюстрированном на фиг. 12А;
Фиг.13А является принципиальной схемой, иллюстрирующей пример участка дороги, включающего в себя ответвление дороги, ответвляющееся от главной дороги;
Фиг.13B является принципиальной схемой, иллюстрирующей информацию о пригодности бокового съезда на маршрут на участке дороги, проиллюстрированном на фиг. 13А;
Фиг.14А является принципиальной схемой, иллюстрирующей пример участка дороги, включающего в себя ответвление дороги, ответвляющееся от главной дороги;
Фиг.14B является принципиальной схемой, иллюстрирующей информацию о пригодности бокового съезда на маршрут на участке дороги, проиллюстрированном на фиг. 14А; и
Фиг.15 является принципиальной схемой, иллюстрирующей пример участка дороги, включающего в себя ответвление дороги, ответвляющееся от главной дороги.
Осуществление изобретения
[0009]
Далее вариант осуществления согласно настоящему изобретению будет описан с обращением к чертежам. В нижеприведённом описании чертежей одинаковые или аналогичные элементы обозначены одинаковыми или аналогичными ссылочными позициями. Следует понимать, что чертежи проиллюстрированы схематично и не выполнены в масштабе. Описанный ниже вариант осуществления иллюстрирует устройство и способ для реализации технических идей настоящего изобретения, и технические идеи настоящего изобретения не предназначены быть ограниченными конструкциями или конфигурациями элементов, описанными здесь. Технические идеи настоящего изобретения должны охватывать различные модификации, находящиеся в пределах объема изобретения, который определен прилагаемой формулой изобретения.
[0010]
<Устройство помощи при вождении>
Устройство помощи при вождении согласно варианту осуществления настоящего изобретения может быть установлено в транспортном средстве. Как показано на фиг. 1, устройство помощи при вождении включает в себя устройство 1 формирования направляющей информации, устройство 2 управления транспортным средством, датчик 3, устройство 4 ввода, устройство 5 вывода, исполнительный механизм 6 и запоминающее устройство 7. Устройство 1 формирования направляющей информации, устройство 2 управления транспортным средством, датчик 3, устройство 4 ввода, устройство 5 вывода, исполнительный механизм 6 и запоминающее устройство 7 могут осуществлять связь для передачи данных, сигналов и информации друг другу проводным или беспроводным способом.
[0011]
Датчик 3 включает в себя датчики состояния движения для обнаружения состояния движения транспортного средства, такие как приемник 31 глобальной навигационной спутниковой системы (GNSS), датчик 32 скорости транспортного средства, датчик 33 ускорения и гироскопический датчик 34, и датчики состояния окружения для обнаружения состояния окружения, такие как камера 35, радар 36 и лазерный сканер 37. Приемник 31 GNSS, который является приемником глобальной системы определения местоположения (GPA), принимает сигналы определения местоположения от спутника и вычисляет информацию определения местоположения, включая широту, долготу и высоту для текущего положения транспортного средства на основании принятых сигналов определения местоположения. Приемник 31 GNSS выводит вычисленную информацию определения местоположения в устройство 1 формирования направляющей информации.
[0012]
Датчик 32 скорости транспортного средства обнаруживает скорость в соответствии со скоростью вращения колес транспортного средства и выводит обнаруженную скорость на устройство 1 формирования направляющей информации и устройство 2 управления транспортным средством. Датчик 33 ускорения обнаруживает ускорение, которое представляет собой по меньшей мере либо продольное ускорение, либо поперечное ускорение транспортного средства, и выводит обнаруженное ускорение в устройство 1 формирования направляющей информации и устройство 2 управления транспортным средством. Гироскопический датчик 34 обнаруживает направление и ориентацию транспортного средства и выводит обнаруженное направление и ориентацию в устройство 1 формирования направляющей информации и устройство 2 управления транспортным средством.
[0013]
Камера 35 представляет собой широкоугольную камеру, установленную в транспортном средстве, например, в верхней части ветрового стекла. Камера 35 может быть либо стереокамерой, либо всенаправленной камерой. Камера 35 захватывает заданную область вокруг транспортного средства для получения данных изображения и обнаруживает состояние окружения, включая дороги, границы транспортного средства, конструкции, дорожную разметку, знаки, другие транспортные средства и пешеходов из полученных данных изображения. Камера 35 выводит данные обнаруженного состояния окружения вокруг транспортного средства в устройство 2 управления транспортным средством.
[0014]
Радар 36 может быть радаром измерения расстояния с использованием миллиметровых или ультразвуковых волн, предусмотренным, например, в передней решетке. Радар 36 сканирует окружение транспортного средства и обнаруживает состояние окружения транспортного средства, включая взаимное расположение (ориентацию) между транспортным средством и препятствием, таким как другое транспортное средство, относительную скорость препятствия и расстояние от транспортного средства до препятствия. Радар 36 выводит данные обнаруженного состояния окружения транспортного средства в устройство 2 управления транспортным средством.
[0015]
Лазерный сканер 37 может быть, например, лазерным дальномером (LRF). Лазерный сканер 37 испускает лазерный луч для измерения времени, проходящего до отражения лазерного импульса от препятствия и его возвращения в лазерный сканер 37, чтобы вычислить расстояние до препятствия, и вычисляет направление, в котором испускается лазерный луч, чтобы получить трехмерные координаты препятствия. Лазерный сканер 37 выводит полученные трехмерные координаты препятствия в устройство 2 управления транспортным средством.
[0016]
Устройство 4 ввода может быть операционным устройством, таким как переключатель, кнопка, клавиатура и сенсорная панель, устройством голосового ввода, таким как микрофон, или интерфейсом, который побуждает камеру захватывать движение пользователя для определения команды, или побуждает электроэнцефалограф обнаруживать мозговые волны пользователя для определения команды. Устройство 4 ввода принимает информацию команды от пользователя, такую как информация о команде, для установления пункта назначения, которого должно достичь транспортное средство, или информация о команде для выбора либо автономного управления, либо ручного управления.
[0017]
Запоминающее устройство 7 может быть носителем данных, таким как полупроводниковая память или дисковый носитель. Запоминающее устройство 7 включает в себя базу данных для хранения картографических данных M. База данных для хранения картографических данных M может управляться сервером таким образом, чтобы дифференциальные данные обновленных картографических данных M получались через телематическую службу, для обновления картографических данных М, сохранённых в запоминающем устройстве 7. Запоминающее устройство 7 может быть установлено в устройстве 1 формирования направляющей информации.
[0018]
Картографические данные M, сохранённые в запоминающем устройстве 7, включают в себя информацию о каждой дороге, такую как информация о дорожных узлах, указывающая опорные точки дороги, и информация об участках дорог, указывающая аспекты участков между соответствующими дорожными узлами. Информация о каждом дорожном узле включает в себя идентификационный номер, координаты положения, количество соединяемых участков дороги, и идентификационный номер соответствующих соединяемых участков дороги. Информация о каждом участке дороги включает в себя идентификационный номер, атрибут дороги, длину участка, количество полос движения, ширину полосы движения, кривизну дороги, ограничение скорости, условия ограничений движения, наличие или отсутствие пунктов оплаты проезда и наличие или отсутствие туннелей. Картографические данные M дополнительно включают в себя для каждой точки разветвления (для каждого дорожного узла) дороги информацию о пригодности для выезда (информацию о полосе движения и участке), указывающую пригодность для выполнения съезда на каждое ответвление дороги (участок съезда) после разветвления каждой полосы движения в точке разветвления. Информация о пригодности бокового съезда назначается для каждой дороги в соответствии с конфигурацией дороги и направлением движения, ограниченным правилами дорожного движения в каждой точке разветвления. Информация о пригодности бокового съезда более подробно описана ниже.
[0019]
Картографические данные M могут дополнительно включать в себя информацию о полосах движения (информацию для каждой полосы движения), такую как информация об узлах полосы движения, указывающих опорные точки полос движения дороги, и информация об участках полосы движения, указывающая аспекты участков между соответствующими узлами полосы движения. Информация о каждом узле полосы движения включает в себя идентификационный номер, координаты положения, количество соединяемых участков полосы движения и идентификационный номер соответствующих соединённых участков полосы движения. Информация по каждому участку полосы движения включает в себя идентификационный номер полосы движения, тип полосы движения, ширину полосы движения, тип линии границы полосы движения, состояние ограничений движения в полосах движения, конфигурацию полосы движения и конфигурацию опорной линии полосы движения.
[0020]
Устройство 1 формирования направляющей информации и устройство 2 управления транспортным средством служат в качестве схемы управления (контроллера), такой как электронный блок управления (ECU), для выполнения операций арифметической логики, необходимых для соответствующих операций устройства помощи при вождении согласно варианту осуществления настоящего изобретения, и могут включать в себя процессор, запоминающее устройство и интерфейс ввода-вывода. Процессор может представлять собой микропроцессор, эквивалентный центральному процессору (ЦП), например, включающий в себя арифметико-логический блок (АЛУ), схему управления (устройство управления) и различные типы регистров. Запоминающее устройство может представлять собой, например, полупроводниковую память или дисковый носитель и может включать в себя регистр, кэш-память и носитель данных, такой как ПЗУ или ОЗУ, в качестве основного запоминающего устройства. Например, процессор может выполнять программу (программу помощи при вождении), предварительно сохраненную в запоминающем устройстве и включающую в себя последовательность обработки, необходимую для операций устройства помощи при вождении согласно варианту осуществления настоящего изобретения.
[0021]
Устройство 1 формирования направляющей информации и устройство 2 управления транспортным средством могут быть физически реализованы посредством программируемого логического устройства (ПЛУ), такого как программируемая логическая интегральная схема (ПЛИС), или могут быть реализованы посредством функциональной логической схемы, эквивалентно сформированной посредством обработки программного обеспечения в полупроводниковой интегральной схеме общего назначения. Элементы, включенные в устройство 1 формирования направляющей информации и устройство 2 управления транспортным средством, могут быть реализованы совместно одним элементом аппаратного обеспечения, или каждый элемент может быть реализован отдельным элементом аппаратного обеспечения. Устройство 1 формирования направляющей информации может быть реализовано посредством автомобильной навигационной системы, такой как информационно-развлекательная система (IVI) в транспортном средстве, а устройство 2 управления транспортным средством может быть реализовано посредством системы помощи при вождении, такой как усовершенствованная система помощи при вождении (ADAS). Устройство 1 формирования направляющей информации и устройство 2 управления транспортным средством соединены друг с другом через сеть связи, такую как шина локальной сети контроллеров (CAN).
[0022]
Устройство 1 формирования направляющей информации включает в себя логические блоки, такие как блок 11 вычисления положения транспортного средства, блок 12 установки пункта назначения, блок 13 поиска маршрута, блок 14 формирования направляющей информации и блок 15 управления представлением, в качестве функциональных или физических аппаратных ресурсов. Блок 11 вычисления положения транспортного средства вычисляет текущее положение транспортного средства в картографических данных M, сохраненных в запоминающем устройстве 7, в соответствии с информацией о положении, полученной приемником 31 GNSS, скоростью, обнаруженной датчиком 32 скорости транспортного средства, ускорением, определяемым датчиком 33 ускорения, а направление движения транспортного средства определяется гироскопическим датчиком 34. Способ вычисления для текущего положения транспортного средства может быть определен соответствующим образом, и текущее положение может быть вычислено таким образом, что только информация о положении, полученная приемником 31 GNSS, проверяется с помощью картографических данных M, сохранённых в запоминающем устройстве 7.
[0023]
Блок 12 установки пункта назначения устанавливает пункт назначения, которого должно достичь транспортное средство, в картографических данных M, сохранённых в запоминающем устройстве 7, в соответствии с информацией команды, введенной пользователем через устройство 4 ввода. Способ установки пункта назначения может быть определен надлежащим образом, и пункт назначения может быть установлен в соответствии с информацией, предварительно сохраненной в запоминающем блоке 7, вместо информации команды, введенной пользователем через устройство 4 ввода.
[0024]
Блок 13 поиска маршрута выполняет поиск (устанавливает) маршрут на дороге, по которой, как предполагается, следует транспортное средство (предполагаемый маршрут движения), из точки отправления, такой как текущее положение транспортного средства, по картографическим данным M, вычисленным блоком 11 вычисления положения транспортного средства, до пункта назначения, установленного блоком 12 установки пункта назначения. Способ поиска маршрута может быть определен надлежащим образом, и маршрут может быть найден в соответствии с одним условием поиска или множеством условий поиска, таких как расстояние движения, предполагаемое требуемое время, точка пересадки и тип дороги. Условие поиска, которому присвоен самый высокий приоритет, может быть определено надлежащим образом и может быть предварительно сохранено, например, в запоминающем устройстве 7. Блок 13 поиска маршрута может выполнять поиск для обеспечения пользователю множества вариантов маршрута для выбора одного из маршрутов из вариантов маршрута в соответствии с информацией команды, введенной пользователем через устройство 4 ввода.
[0025]
Блок 14 формирования направляющей информации формирует направляющую информацию для направления (проведения) транспортного средства по маршруту, который найден блоком 13 поиска маршрута (далее называемому «найденный маршрут»). Направляющая информация включает в себя информацию, необходимую устройству 2 управления транспортным средством для управления транспортным средством, которое необходимо вести по найденному маршруту, и информацию, необходимую блоку 15 управления представлением для представления направляющей информации пользователю таким образом, чтобы вести транспортное средство по найденному маршруту.
[0026]
Пример процесса формирования направляющей информации блоком 14 формирования направляющей информации описан ниже со ссылкой на фиг. 2. Фиг.2 иллюстрирует ситуацию в управлении, показывающую найденные маршруты R1 и R2 со съездом на ответвление дороги BR от основной дороги MR на участке дороги, включающем в себя точку разветвления, в которой ответвление дороги BR ответвляется влево от главной дороги MR. Главная дорога MR представляет собой двухполосную дорогу, включающую в себя полосы движения L1 и L2, а ответвление дороги BR включает в себя полосу движения L3.
[0027]
Блок 14 формирования направляющей информации вычисляет, в качестве элемента направляющей информации, расстояние D1 от текущего положения PV транспортного средства в картографических данных M до дорожного узла N, соответствующего точке разветвления. Блок 14 формирования направляющей информации вычисляет, в качестве элемента направляющей информации, информацию флага, указывающую, что участок дороги (участок съезда), соответствующий ответвлению дороги BR, является найденным маршрутом R2, и информацию выделения, указывающую, что участок дороги (участок съезда), соответствующий главной дороге MR, не является найденным маршрутом R2, а является другим маршрутом R3 (далее называемым «ненайденным маршрутом»), отличным от найденного маршрута R2. Блок 14 формирования направляющей информации вычисляет количество полос (две) главной дороги MR и количество полос (одну) ответвления дороги BR. Блок 14 формирования направляющей информации вычисляет в качестве элемента направляющей информации положение PS начала ответвления и положение PE окончания ответвления для ответвления дороги BR.
[0028]
Блок 14 формирования направляющей информации извлекает, в качестве элемента направляющей информации, информацию о пригодности бокового съезда (в дальнейшем называемую «информацией о пригодности бокового съезда на маршрут») IL, указывающую пригодность для осуществления съезда на дорогу к найденному маршруту R2 (участок съезда) в отношении соответствующих полос L1, L2 и L3 движения, присутствующих в точке разветвления, из которой въезжает транспортное средство, из картографических данных M, сохранённых в запоминающем устройстве 7. Информация IL о пригодности бокового съезда на маршрут является информацией, указывающей, что полосы L1 и L2 движения главной дороги MR не позволяют транспортному средству съехать в направлении ответвления дороги BR для выхода на найденный маршрут R2, и что полоса L3 движения ответвления дороги BR позволяет транспортному средству съехать в сторону ответвления дороги BR для выхода на найденный маршрут R2. Фиг.2 схематично накладывает метки «○» и «✕» на соответствующих полосах L1, L2 и L3 движения. Метка «○» указывает, что транспортному средству разрешен съезд в направлении найденного маршрута R2, а метка «✕» указывает, что транспортному средству запрещен съезд в направлении найденного маршрута R2. Блок 14 формирования направляющей информации может вычислять информацию IL о пригодности бокового съезда на маршрут на основании найденного маршрута и картографических данных M вместо извлечения информации IL о пригодности бокового съезда на маршрут, сохранённой в запоминающем устройстве 7.
[0029]
Блок 14 формирования направляющей информации формирует направляющую информацию, включающую в себя расстояние D1 от текущего положения PV транспортного средства до дорожного узла N, информацию флага для найденных маршрутов R1 и R2 и ненайденного маршрута R3, количество полос движения на дороге в каждом направлении разветвления (участок съезда), положение PS начала разветвления и положение PE окончания разветвления ответвления дороги BR, и информацию IL о пригодности бокового съезда на маршрут, и выводит сформированную направляющую информацию в устройство 2 управления транспортным средством. Блок 14 формирования направляющей информации может дополнительно извлекать информацию, включающую в себя ограничение скорости, атрибут дороги, кривизну дороги, наличие или отсутствие пунктов оплаты проезда, а также наличие или отсутствие туннелей из картографических данных M, сохранённых в запоминающем устройстве 7, и передают направляющую информацию, включающую в себя дополнительную извлеченную информацию, в устройство 2 управления транспортным средством.
[0030]
Блок 15 управления представлением выводит управляющий сигнал для управления устройством 5 вывода для представления пользователю направляющей информации для направления транспортного средства по найденным маршрутам R1 и R2 в соответствии с направляющей информацией, формируемой блоком 14 формирования направляющей информации. Устройство 5 вывода включает в себя, например, дисплей 51 и громкоговоритель 52. Дисплей 51 отображает данные изображения, накладывающие найденные маршруты R1 и R2 на главную дорогу MR и ответвление дороги BR в картографических данных M, как показано на фиг. 2, в соответствии с управляющим сигналом, выводимым из блока 15 управления представлением. Громкоговоритель 52 выводит речевой сигнал для направления транспортного средства на съезд на ответвление дороги BR в точке разветвления в соответствии с управляющим сигналом от блока 15 управления представлением.
[0031]
Устройство 2 управления транспортным средством выводит на исполнительный механизм 6 управляющий сигнал для управления транспортным средством для движения по найденному маршруту в соответствии с направляющей информацией, формируемой блоком 14 формирования направляющей информации, и условиями движения и состоянием окружения транспортного средства, обнаруженными датчиком 3. Устройство 2 управления транспортным средством может выполнять автономное управление, при котором осуществляется управление транспортным средством для его движения без операций со стороны пользователя, или может выполнять по меньшей мере одно из управления движением, управления замедлением и управления рулевым управлением для помощи пользователю при движении. Управление посредством устройства 2 управления транспортным средством и представление направляющей информации блоком 15 управления представлением не обязательно выполняются одновременно. Например, направляющая информация от блока 15 управления представлением не обязательно представляется пользователю во время автономного управления посредством устройства 2 управления транспортным средством.
[0032]
Например, устройство 2 управления транспортным средством определяет полосу L1 движения, в которой движется транспортное средство, и другие полосы L2 и L3 движения на участке дороги, как показано на фиг. 2, в соответствии с данными о состоянии окружения транспортного средства, обнаруженными датчиком 3. Устройство 2 управления транспортным средством управляет транспортным средством таким образом, чтобы оно следовало по маршруту R0 движения для входа в полосу L3 движения, определенную как позволяющая транспортному средству выехать из полосы L1 движения в соответствии с информацией IL о пригодности бокового съезда на маршрут.
[0033]
Исполнительный механизм 6 включает в себя исполнительный механизм 61 ускорения, исполнительный механизм 62 замедления и исполнительный механизм 63 рулевого управления. Исполнительный механизм 61 ускорения представляет собой дроссельный клапан с электронным управлением, например, для управления апертурой ускорения транспортного средства в соответствии с управляющим сигналом от устройства 2 управления транспортным средством. Исполнительный механизм 62 замедления представляет собой гидравлический контур, например, для управления операцией замедления посредством тормоза транспортного средства в соответствии с управляющим сигналом от устройства 2 управления транспортным средством. Исполнительный механизм 63 рулевого управления управляет рулевым управлением транспортного средства в соответствии с управляющим сигналом от устройства 2 управления транспортным средством.
[0034]
Например, способ управления транспортным средством с использованием устройства 2 управления транспортным средством может включать в себя процесс передачи в устройство 2 управления транспортным средством информации для каждой полосы движения, включающей в себя информацию об узле полосы движения и информацию об участке полосы движения в картографических данных M, и управления транспортным средством путём побуждения устройства 2 управления транспортным средством определять полосу движения, по которой должно двигаться транспортное средство, в соответствии с информацией для каждой полосы движения. Однако объем данных, передаваемых в устройство 2 управления транспортным средством, чрезвычайно велик, что увеличивает нагрузку на сеть связи, такую как шина CAN (нагрузка трафика), соединяющая блок 14 формирования направляющей информации с устройством 2 управления транспортным средством, и увеличивает нагрузку по обработке на стороне устройства 2 управления транспортным средством.
[0035]
Устройство помощи при вождении в соответствии с вариантом осуществления настоящего изобретения побуждает блок 14 формирования направляющей информации передавать в устройство 2 управления транспортным средством направляющую информацию, включающую в себя информацию о пригодности бокового съезда на маршрут, вместо информации для каждой полосы движения, и побуждает устройство 2 управления транспортным средством определить полосу движения, по которой должно двигаться транспортное средство, в соответствии с информацией о пригодности бокового съезда на маршрут, для управления транспортным средством. Таким образом, объем данных, передаваемых в устройство 2 управления транспортным средством, может быть уменьшен по сравнению со случаем использования информации для каждой полосы движения, таким образом уменьшая как нагрузку по обмену данными в сети связи, такой как шина CAN, соединяющая блок 14 формирования направляющей информации с устройством 2 управления транспортным средством, так и нагрузку по обработке на стороне устройства 2 управления транспортным средством. Однако устройство помощи при вождении в соответствии с вариантом осуществления настоящего изобретения может быть неспособным указать тип точки разветвления только в соответствии с информацией о пригодности бокового съезда на маршрут в зависимости от конфигурации дороги и правил дорожного движения в точке разветвления, будучи неспособным определить полосу движения, в которую следует направить движение транспортного средства.
[0036]
Например, участок дороги, показанный на фиг. 3А, имеет конфигурацию дороги, в которой ответвление дороги BR1 ответвляется вправо от главной дороги MR1. Главная дорога MR1 включает в себя полосы L11, L12, L13 и L14 движения, проходящие параллельно друг другу до точки перед точкой разветвления (до прохождения точки разветвления). Полосы L11, L12 и L13 движения слева относятся к главной дороге MR1 после прохождения точки разветвления, а крайняя правая полоса L14 движения разветвляется в положении P1 начала разветвления на ответвление дороги BR1 через точку разветвления. Как схематично проиллюстрировано знаками, разрешающими движение вперед только в обозначенных направлениях, указанных стрелками на фиг. 3А, движение транспортных средств, движущихся в полосах L11, L12 и L13 движения, ограничено движением в направлении главной дороги MR1, а движение транспортных средств, движущихся в полосе L14 движения, ограничено направлением, ответвляющимся на ответвление дороги BR1, в соответствии с правилами дорожного движения.
[0037]
Когда ответвление дороги BR1, показанное на фиг. 3А, является найденным маршрутом, информация IL1 о пригодности бокового съезда на маршрут для соответствующих полос L11, L12, L13 и L14 движения, присутствующих в точке разветвления, указывает, что транспортному средству запрещен съезд из трех левых полос L11, L12 и L13 движения в направлении ответвления дороги BR1 (участок съезда) для выхода на найденный маршрут, и транспортному средству разрешён съезд из крайней правой полосы L14 движения в направлении ответвления дороги BR1 (участок съезда) для выхода на найденный маршрут, как показано на фиг. 3B.
[0038]
В качестве другого примера, по сравнению с участком дороги, показанным на фиг. 3А, участок дороги, показанный на фиг. 4А, имеет конфигурацию дороги, аналогичную участку дороги, показанному на фиг. 3А, в которой ответвление дороги BR2 ответвляется вправо от главной дороги MR2. Главная дорога MR2 включает в себя полосы L21, L22, L23 и L24 движения, проходящие параллельно друг другу до точки перед точкой разветвления. Полосы L21, L22 и L23 движения слева относятся к главной дороге MR2 после прохождения точки разветвления, а крайняя правая полоса L24 ответвляется в положении P2 начала разветвления в ответвление дороги BR2 через точку разветвления. Как схематично показано знаками, разрешающими движение вперед только в обозначенных направлениях, указанных стрелками на фиг. 4A, движение транспортных средств, движущихся по полосам L21 и L22 движения, ограничено движением только в направлении главной дороги MR2, а движение транспортных средств, движущихся по полосе L24 движения, ограничено движением только в направлении, разветвляющемся на ответвление дороги BR2 в соответствии с правилами дорожного движения, аналогично тому, как показано на фиг. 3А, за исключением того, что транспортным средствам, движущимся по полосе L23 движения, разрешено движение не только в направлении по главной дороге MR2, но также и в направлении, разветвляющемся до ответвления дороги BR2, в соответствии с правилами дорожного движения.
[0039]
Когда ответвление дороги BR2, показанное на фиг. 4A, является найденным маршрутом, информация IL2 о пригодности бокового съезда на маршрут указывает, что транспортному средству запрещен съезд с полос L21 и L22 движения в направлении ответвления дороги BR2 (участок съезда) для выхода на найденный маршрут, и транспортному средству разрешен съезд с полос L23 и L24 движения в направлении ответвления дороги BR2 (участок съезда) для выхода на найденный маршрут, как показано на фиг. 4В. Участки дороги, показанные на фиг. 3А и фиг. 4А, имеют одинаковую конфигурацию дороги в точке разветвления, но отличаются друг от друга информацией IL1, IL2 о пригодности бокового съезда на маршрут, как показано на фиг. 3B и фиг. 4B, из-за различия в правилах дорожного движения.
[0040]
В качестве еще одного примера, по сравнению с участком дороги, показанным на фиг. 4А, участок дороги, показанный на фиг. 5А, имеет конфигурацию дороги, в которой ответвление дороги BR3 ответвляется вправо от главной дороги MR3. Главная дорога MR3 включает в себя полосы L31, L32, L33 и L34 движения, проходящие параллельно друг другу до точки перед точкой разветвления. Полосы L31 и L32 движения относятся к главной дороге MR3 после прохождения точки разветвления, а полосы L33 и L34 движения разветвляются в положении P3 начала разветвления на ответвление дороги BR3 через точку разветвления. Как схематично показано знаками, разрешающими движение вперед только в обозначенных направлениях, указанных стрелками на фиг. 5А, движение транспортных средств, движущихся в полосах L31 и L32 движения, ограничено движением только в направлении по главной дороге MR3, а движение транспортных средств, движущихся в полосах L33 и L34 движения, ограничено движением только в направлении, ответвляющемся в ответвление дороги BR3, в соответствии с правилами дорожного движения.
[0041]
Когда ответвление дороги BR3, показанное на фиг. 5А, является найденным маршрутом, информация IL3 о пригодности бокового съезда на маршрут указывает, что транспортному средству запрещен съезд с полос L31 и L32 движения в направлении ответвления дороги BR3 (участок съезда) для выхода на найденный маршрут, и транспортному средству разрешен съезд с полос L33 и L34 движения в направлении ответвления дороги BR3 (участок съезда) для выхода на найденный маршрут, как показано на фиг. 5В. Участки дороги, показанные на фиг. 4А и фиг. 5А, отличаются друг от друга конфигурацией дороги в точке разветвления, но имеют ту же информацию IL2, IL3 о пригодности бокового съезда на маршрут, как показано на фиг. 4B и фиг. 5B, из-за различия правил дорожного движения.
[0042]
Как описано выше, конфигурации дорог на участках дороги, показанных на фиг. 4А и фиг. 5A, не могут различаться только в соответствии с информацией IL2, IL3 о пригодности бокового съезда на маршрут в точке разветвления. На участке дороги, показанном на фиг. 5A, управление транспортным средством осуществляется таким образом, чтобы оно двигалось либо по полосе L33 движения, либо по полосе L34 движения, ответвляющихся в ответвление дороги BR3 через точку разветвления и позволяющих транспортному средству осуществить съезд в соответствии с информацией IL3 о пригодности бокового съезда на маршрут, чтобы соответствующим образом направить транспортное средство в ответвление дороги BR3. На участке дороги, показанном на фиг. 4А, когда транспортное средство движется по полосе L23 движения, относящейся к главной дороге MR2 после прохождения точки разветвления, транспортное средство может ошибочно продолжить движение по полосе L23 движения в направлении главной дороги MR2, проезжая мимо точки разветвления, что не приводит к выполнению смены полосы движения на полосу L24 движения рядом с точкой разветвления, ввиду того, что информация IL2 о пригодности бокового съезда на маршрут указывает, что транспортное средство также может осуществить съезд из полосы L23 движения. Кроме того, транспортному средству понадобилось бы выполнить внезапную смену полосы движения на полосу L24 движения из полосы L23 движения в точке разветвления, чтобы попасть на ответвление дороги BR2, что может привести к тому, что водитель ощутит дискомфорт, или плавная смена полос движения может не получиться, если другое транспортное средство движется по полосе L24 движения. Принимая во внимание вышеупомянутые проблемы, устройство помощи при вождении в соответствии с вариантом осуществления настоящего изобретения может точно указывать тип точки разветвления, чтобы надлежащим образом направить транспортное средство, вне зависимости от конфигурации участка дороги, как показано на фиг. 4А или фиг. 5A.
[0043]
Блок 14 формирования направляющей информации извлекает, в дополнение к информации о пригодности бокового съезда на маршрут для соответствующих полос движения, присутствующих в точке разветвления на найденном маршруте, информацию о пригодности бокового съезда на маршрут для полос движения, присутствующих в точке разветвления, указывающую пригодность для выполнения съезда на дорогу по ненайденному маршруту (участок съезда) (далее называемую «информацией о пригодности бокового съезда не на маршрут») в направлении, отличном от направления разветвления на найденный маршрут, из картографических данных M, сохранённых в запоминающем устройстве 7. Информация о пригодности бокового съезда на маршрут и информация о пригодности бокового съезда не на маршрут могут быть вычислены блоком 14 формирования направляющей информации в соответствии с найденным маршрутом и картографическими данными M вместо их предварительного сохранения в запоминающем устройстве 7 и извлечения блоком 14 формирования направляющей информации.
[0044]
Блок 14 формирования направляющей информации сравнивает информацию о пригодности бокового съезда на маршрут и информацию о пригодности бокового съезда не на маршрут для каждой полосы движения, имеющейся в точке разветвления, чтобы определить наличие или отсутствие полосы движения, позволяющей транспортному средству съехать в направлении обоих из найденного маршрута и ненайденного маршрута. Если есть полоса движения, определенная как позволяющая транспортному средству съехать как на найденный маршрут, так и на ненайденный маршрут, блок 14 формирования направляющей информации передает как информацию о пригодности бокового съезда на маршрут, так и информацию о пригодности бокового съезда не на маршрут в устройство 2 управления транспортным средством. Если нет полосы движения, которая позволила бы транспортному средству съехать в направлении и на найденный маршрут, и на ненайденный маршрут, блок 14 формирования направляющей информации по выбору передает информацию о пригодности бокового съезда на маршрут, не передавая информацию о пригодности бокового съезда не на маршрут в устройство 2 управления транспортным средством.
[0045]
Например, как показано на фиг. 6А, где представлен тот же участок дороги, что и на фиг. 4A, если найденный маршрут ведёт к ответвлению дороги BR2, блок 14 формирования направляющей информации извлекает информацию IL2 о пригодности бокового съезда на маршрут и информацию IL4 о пригодности бокового съезда не на маршрут для соответствующих полос L21, L22, L23, и L24 движения, присутствующих в точке разветвления. Информация IL2 о пригодности бокового съезда на маршрут указывает, что транспортному средству запрещен съезд с полос L21 и L22 движения в направлении ответвления дороги BR2 (участок съезда) для выхода на найденный маршрут, и транспортному средству разрешен съезд с полос L23 и L24 движения в направлении ответвления дороги BR2 (участок съезда) для выхода на найденный маршрут. Информация IL4 о пригодности бокового съезда не на маршрут указывает, что транспортному средству разрешен съезд с полос L21, L22 и L23 движения в направлении главной дороги MR2 (участок съезда) для съезда на ненайденный маршрут, и транспортному средству запрещен съезд с полосы L24 движения в направлении главной дороги MR2 (участок съезда) для выхода на ненайденный маршрут.
[0046]
Блок 14 формирования направляющей информации сравнивает информацию IL2 о пригодности бокового съезда на маршрут и информацию IL4 о пригодности бокового съезда не на маршрут для соответствующих полос L21, L22, L23 и L24 движения, присутствующих в точке разветвления, так что определяется, что полоса L23 движения позволяет транспортному средству выйти как на найденный маршрут, так и на ненайденный маршрут. Затем блок 14 формирования направляющей информации передает направляющую информацию, включающую в себя как информацию IL2 о пригодности бокового съезда на маршрут, так и информацию IL4 о пригодности бокового съезда не на маршрут в устройство 2 управления транспортным средством. Блок 14 формирования направляющей информации может передавать направляющую информацию, дополнительно включающую в себя информацию, указывающую, что транспортное средство должно двигаться по полосе L24 движения, избегая при этом движения по полосе L23 движения, до достижения точки разветвления. Блок 14 формирования направляющей информации дополнительно передает в блок 15 управления представлением направляющую информацию, включающую в себя информацию, необходимую блоку 15 управления представлением для направления транспортного средства по найденному маршруту, и указывающую, что транспортное средство должно двигаться в полосе L24 движения до достижения точки разветвления.
[0047]
Когда ответвление дороги BR2 является найденным маршрутом, а главная дорога MR2 является ненайденным маршрутом, например, блок 14 формирования направляющей информации может сравнивать информацию IL2 о пригодности бокового съезда на маршрут и информацию IL4 о пригодности бокового съезда не на маршрут только для полосы L23 движения из полос L21, L22 и L23 движения, ближайших к ответвлению дороги BR2, чтобы определить, позволяет ли полоса L23 движения транспортному средству съехать по направлению как к найденному маршруту, так и к ненайденному маршруту, а именно определяет, может ли транспортное средство, движущееся по полосе L23 движения, быть направлено как по найденному маршруту, так и по ненайденному маршруту, вместо сравнения информации IL2 о пригодности бокового съезда на маршрут и информации IL4 о пригодности бокового съезда не на маршрут для всех полос L21, L22, L23 и L24 движения, имеющихся в точке разветвления. Полоса L23 движения является ближайшей к найденному маршруту, и таким образом предполагается, что она позволит транспортному средству съехать на найденный маршрут с большей вероятностью, чем полосы L21 и L22 движения. Определение того, позволяет ли полоса L23 движения транспортному средству съехать в направлении как на найденный маршрут, так и на ненайденный маршрут, может привести по существу к тем же самым результатам определения с высокой вероятностью, что и в случае сравнения информации IL2 о пригодности бокового съезда на маршрут и информации IL4 о пригодности бокового съезда не на маршрут для всех полос L21, L22, L23 и L24 движения, что соответственно уменьшает вычислительную нагрузку.
[0048]
В качестве другого примера, показанного на фиг. 6B, на которой представлен тот же участок дороги, что и на фиг. 5A, когда найденный маршрут ведёт на ответвление дороги BR3, блок 14 формирования направляющей информации вычисляет информацию IL3 о пригодности бокового съезда на маршрут и информацию IL5 о пригодности бокового съезда не на маршрут в соответствии с картографическими данными M. Информация IL3 о пригодности бокового съезда на маршрут указывает, что транспортному средству запрещен съезд с полос L31 и L32 движения в направлении ответвления дороги BR3 (участок съезда) для съезда на найденный маршрут, и транспортному средству разрешен съезд с полос L33 и L34 движения в направлении ответвления дороги BR3 (участок съезда) для выхода на найденный маршрут. Информация IL5 о пригодности бокового съезда не на маршрут указывает, что транспортному средству разрешен съезд с полос L31 и L32 движения в направлении главной дороги MR3 (участок съезда) для выхода на ненайденный маршрут, и транспортному средству запрещен съезд с полос L33 и L34 движения в направлении главной дороги MR3 (участок съезда) для выхода на ненайденный маршрут.
[0049]
Блок 14 формирования направляющей информации сравнивает информацию IL3 о пригодности бокового съезда на маршрут и информацию IL5 о пригодности бокового съезда не на маршрут для определения, что нет полосы движения, которая позволяла бы транспортному средству выехать как на ответвление дороги BR3, которая является найденным маршрутом, так и на главную дорогу MR3, которая является ненайденным маршрутом. В этом случае устройство 2 управления транспортным средством управляет транспортным средством, чтобы оно двигалось либо по полосе L33 движения, либо по полосе L34 движения, для которой определено, что она позволяет транспортному средству съехать в направлении ответвления дороги BR3 в соответствии с информацией IL3 о пригодности бокового съезда на маршрут, таким образом, чтобы направить транспортное средство надлежащим образом. Таким образом, блок 14 формирования направляющей информации по выбору передает направляющую информацию, включающую в себя информацию IL3 о пригодности бокового съезда на маршрут, не включая информацию IL5 о пригодности бокового съезда не на маршрут, в устройство 2 управления транспортным средством. Блок 14 формирования направляющей информации дополнительно передает в блок 15 управления представлением направляющую информацию, включающую в себя информацию, необходимую блоку 15 управления представлением для направления транспортного средства по найденному маршруту.
[0050]
Когда направляющая информация, передаваемая из блока 14 формирования направляющей информации, включает в себя как информацию IL2 о пригодности бокового съезда на маршрут, так и информацию IL4 о пригодности бокового съезда не на маршрут, устройство 2 управления транспортным средством определяет, что участок дороги включает в себя точку разветвления, как показано на фиг. 6А. Когда транспортное средство 100 достигает точки в пределах заданного расстояния от точки разветвления и движется по полосе L23 движения, относящейся к главной дороге MR2 после прохождения точки разветвления, как показано на фиг. 7, устройство 2 управления транспортным средством управляет транспортным средством 100 до достижения точки разветвления для смены полосы движения на полосу L24 движения, разветвляющуюся на ответвление дороги BR2 через точку разветвления, для следования по маршруту R11 движения для съезда на ответвление дороги BR2. Диапазон заданного расстояния соответствует расстоянию D1 от дорожного узла D, соответствующего точке разветвления, до текущего положения PV транспортного средства, например, как показано на фиг. 2,и может быть определено надлежащим образом в зависимости от типа точки разветвления или скорости транспортного средства 100.
[0051]
Момент времени начала смены полосы движения может быть определен надлежащим образом до достижения точки разветвления и может быть, например, сразу после того, как транспортное средство достигнет точки, например, в пределах заданного расстояния от точки разветвления. В качестве альтернативы, моментом времени может быть момент, когда устройство 2 управления транспортным средством принимает как информацию IL2 о пригодности бокового съезда на маршрут, так и информацию IL4 о пригодности бокового съезда не на маршрут, или может быть моментом, когда транспортное средство может сменить полосу движения на полосу L24 движения. В качестве альтернативы, моментом времени может быть момент, когда расстояние D11 между текущим положением транспортного средства 100 и точкой P2 начала разветвления, как показано на фиг. 7, уменьшается до заданного порогового значения или меньше его. В качестве альтернативы, транспортное средство 100 может начать смену полосы движения в момент, когда расстояние между текущим положением транспортного средства 100 и дорожным узлом, соответствующим точке разветвления, уменьшается до заданного порогового значения или меньше его. Когда транспортное средство 100 в пределах заданного расстояния до точки разветвления уже движется в полосе L24 движения, разветвляющейся на ответвление дороги BR2 через точку разветвления, может осуществляться управление транспортным средством 100, чтобы избежать смены полосы движения на полосу L23 движения до достижения точки разветвления таким образом, чтобы продолжить движение по полосе L24 движения для съезда на ответвление дороги BR2.
[0052]
Блок 15 управления представлением управляет дисплеем 51 и громкоговорителем 52 для представления водителю направляющей информации, направляющей транспортное средство для движения в полосе L24 движения, разветвляющейся на ответвление дороги BR2, в соответствии с направляющей информацией, передаваемой из блока 14 формирования направляющей информации. Как показано на фиг. 8A, дисплей 51 отображает данные изображения, в которых найденный маршрут R12 наложен на полосу L24 движения, направляя транспортное средство в полосу L24 движения, разветвляющуюся на ответвление дороги BR2. Громкоговоритель 52 выводит речевой сигнал для информирования водителя о направляющей информации направляющей транспортное средство для движения в полосе L24 движения, разветвляющейся на ответвление дороги BR2.
[0053]
Если направляющая информация, передаваемая из блока 14 формирования направляющей информации, не включает в себя информацию IL5 о пригодности бокового съезда не на маршрут, а включает в себя только информацию IL3 о пригодности бокового съезда на маршрут, устройство 2 управления транспортным средством может определить, что участок дороги включает в себя точку разветвления, как показано на фиг. 6В. Поскольку транспортное средство может двигаться либо по полосе L33 движения, либо по полосе L34 движения, устройство 2 управления транспортным средством управляет транспортным средством таким образом, чтобы оно двигалось либо по полосе L33 движения, либо по полосе L34 движения для съезда на ответвление дороги BR3. Как проиллюстрировано на фиг. 8B, поскольку транспортное средство может двигаться либо по полосе L33 движения, либо по полосе L34 движения, блок 15 управления представлением побуждает дисплей 51 отображать данные изображения, в которых найденный маршрут R12 наложен на среднюю часть двух полос L33 и L34 движения. Блок 15 управления представлением может выводить речевую направляющую информацию, направляющую транспортное средство для движения либо по полосе L33 движения, либо по полосе L34 движения.
[0054]
<Способ помощи при вождении>
Пример способа помощи при вождении в соответствии с вариантом осуществления настоящего изобретения описан ниже с обращением к блок-схеме, показанной на фиг. 9. На этапе S1 блок 11 вычисления положения транспортного средства вычисляет текущее положение транспортного средства в картографических данных M, сохраненных в запоминающем устройстве 7, в соответствии с информацией о положении, полученной приемником 31 GNSS. На этапе S2 блок 12 установки пункта назначения устанавливает пункт назначения в картографических данных M, сохранённых в запоминающем устройстве 7, в соответствии с информацией команды, введенной пользователем через устройство 4 ввода. На этапе S3 блок 13 поиска маршрута выполняет поиск маршрута на дороге, по которой, как предполагается, движется транспортное средство из текущего положения (точки отправления) транспортного средства, вычисленного блоком 11 вычисления положения транспортного средства, до пункта назначения, установленного блоком 12 установки пункта назначения.
[0055]
На этапе S4 блок 14 формирования направляющей информации формирует направляющую информацию, побуждающую транспортное средство следовать по маршруту, найденному блоком 13 поиска маршрута (найденный маршрут), таким образом, чтобы передать сформированную направляющую информацию в устройство 2 управления транспортным средством через сеть связи, такую как шина CAN, а также вывести информацию в блок 15 управления представлением. Ниже предполагается, что найденный маршрут ведёт к ответвлению дороги BR2 на участке дороги, как показано на фиг. 4A, в котором полоса L24 движения из смежных двух полос L23 и L24 движения на главной дороге MR2 разветвляется на ответвление дороги BR2 через точку разветвления, в то время как другая полоса L23 движения относится к главной дороге MR2, и в котором транспортному средству разрешен съезд как с полосы L23 движения, так и с полосы L24 движения в направлении ответвления дороги BR2 в точке разветвления. Когда транспортное средство достигает точки в пределах заданного расстояния от точки разветвления, и транспортное средство движется по полосе L23 движения, относящейся к главной дороге MR2 после прохождения точки разветвления, блок 14 формирования направляющей информации формирует направляющую информацию, направляющую транспортное средство на полосу L24 движения, разветвляющуюся на ответвление дороги BR2 через точку разветвления.
[0056]
На этапе S5 устройство 2 управления транспортным средством принимает направляющую информацию, передаваемую из блока 14 формирования направляющей информации, для управления транспортным средством в соответствии с принятой направляющей информацией. Блок 15 управления представлением побуждает дисплей 51 отображать изображение или побуждает громкоговоритель 52 выводить голос, чтобы представить пользователю направляющую информацию для направления транспортного средства по найденному маршруту к в соответствии с направляющей информацией, передаваемой от блока 14 формирования направляющей информации.
[0057]
Пример процесса формирования направляющей информации на этапе S4, показанный на фиг. 9, более подробно описан ниже с обращением к блок-схеме, показанной на фиг. 10. На этапе S11 блок 14 формирования направляющей информации обнаруживает точку разветвления, присутствующую в направлении движения транспортного средства, в картографических данных M, сохраненных в запоминающем устройстве 7, в соответствии с текущим положением транспортного средства, вычисленным блоком 11 вычисления положения транспортного средства, и найденным маршрутом, который найден блоком 13 поиска маршрута.
[0058]
На этапе S12 блок 14 формирования направляющей информации извлекает из картографических данных M, сохранённых в запоминающем устройстве 7, информацию о пригодности бокового съезда на маршрут, указывающую пригодность для выполнения съезда на дорогу к найденному маршруту (участок съезда), и информацию о пригодности бокового съезда не на маршрут, указывающую пригодность для выполнения съезда на дорогу к ненайденному маршруту (участок съезда) в отношении соответствующих полос движения, присутствующих в точке разветвления, обнаруженной на этапе S11.
[0059]
На этапе S13 блок 14 формирования направляющей информации сравнивает для каждой полосы движения информацию о пригодности бокового съезда на маршрут и информацию о пригодности бокового съезда не на маршрут, извлечённую на этапе S12, и определяет наличие или отсутствие полосы движения, позволяющей транспортному средству съехать в направлении как найденного маршрута, так и ненайденного маршрута. Например, в точке разветвления, как показано на фиг. 6A, информация IL2 о пригодности бокового съезда на маршрут сравнивается с информацией IL4 о пригодности бокового съезда не на маршрут для каждой полосы движения, и определяется, что полоса L23 движения позволяет транспортному средству съехать в направлении как к найденному маршруту, так и к ненайденному маршруту. В точке разветвления, как показано на фиг. 6B, информация IL3 о пригодности бокового съезда на маршрут сравнивается с информацией IL5 о пригодности бокового съезда не на маршрут для каждой полосы движения, и не определена полоса движения, которая позволяла бы транспортному средству выполнить съезд как к найденному маршруту, так и к ненайденному маршруту.
[0060]
Если блок 14 формирования направляющей информации определяет, что имеется полоса движения, позволяющая транспортному средству выполнить съезд как на найденный маршрут, так и на ненайденный маршрут на этапе S13, процесс переходит к этапу S14. На этапе S14 блок 14 формирования направляющей информации передает (обеспечивает) в устройство 2 управления транспортным средством направляющую информацию, включающую в себя как информацию о пригодности бокового съезда на маршрут, так и информацию о пригодности бокового съезда не на маршрут для соответствующих полос движения, имеющихся в точке разветвления. На этапе S5, показанном на фиг. 9, когда устройство 2 управления транспортным средством принимает направляющую информацию, включающую в себя как информацию о пригодности бокового съезда на маршрут, так и информацию о пригодности бокового съезда не на маршрут, и, например, когда транспортное средство 100 достигает точки в пределах заданного расстояния от точки разветвления и движется по полосе L23 движения, относящейся к главной дороге MR2 после прохождения точки разветвления, как показано на фиг.7, устройство 2 управления транспортным средством управляет транспортным средством 100 для выполнения смены полосы движения на полосу L24 движения, разветвляющуюся на ответвление дороги BR2 через точку разветвления.
[0061]
Если блок 14 формирования направляющей информации определяет, что нет полосы движения, позволяющей транспортному средству выполнить съезд по направлению как к найденному маршруту, так и к ненайденному маршруту на этапе S13, проиллюстрированном на фиг. 10, процесс переходит к этапу S15. На этапе S15 блок 14 формирования направляющей информации по выбору передает (обеспечивает) информацию о пригодности бокового съезда на маршрут, не передавая информацию о пригодности бокового съезда не на маршрут для соответствующих полос движения, имеющихся в точке разветвления, в устройство 2 управления транспортным средством. На этапе S5, проиллюстрированном на фиг. 9, при приеме направляющей информации, по выбору включающей в себя информацию о пригодности бокового съезда на маршрут, без включения информации о пригодности бокового съезда не на маршрут, устройство 2 управления транспортным средством управляет транспортным средством для движения по полосе движения, для которой определено, что она позволяет транспортному средству выполнить съезд в направлении найденного маршрута в соответствии с информацией о пригодности бокового съезда на маршрут.
[0062]
Согласно варианту осуществления настоящего изобретения на участке дороги, как проиллюстрировано на фиг. 4A, например, в котором полоса L24 движения из смежных двух полос L23 и L24 движения на главной дороге MR2 разветвляется на ответвление дороги BR2 через точку разветвления, в то время как другая полоса L23 движения относится к главной дороге MR2 после прохождения точки разветвления, когда транспортное средство достигает точки в пределах заданного расстояния от точки разветвления и движется по полосе L23 движения, относящейся к главной дороге MR2 после прохождения точки разветвления, транспортное средство направляется на полосу L24 движения, разветвляющуюся на ответвление дороги BR2 через точку разветвления. Таким образом, транспортное средство, движущееся по полосе L23 движения, относящейся к главной дороге MR2 после прохождения точки разветвления, может, прежде чем достигнет точки разветвления, достичь полосы L24 движения, разветвляющейся на ответвление дороги BR2 через точку разветвления, независимо от того, осуществляется ли управление транспортным средством посредством автономного управления с помощью устройства 2 управления транспортным средством или ручного управления водителя. Таким образом, настоящий вариант осуществления может предотвратить продолжение движения транспортного средства по полосе L23 движения, относящейся к главной дороге MR2, ошибочно проезжая точку разветвления или внезапно меняя полосу движения в полосе L24 движения, разветвляющейся на ответвление дороги BR2 при достижении точки разветвления, таким образом плавно направляя транспортное средство на ответвление дороги BR2.
[0063]
При сравнении информации о пригодности бокового съезда на маршрут и информации о пригодности бокового съезда не на маршрут для соответствующих полос движения, имеющихся в точке разветвления, для определения наличия или отсутствия данных в отношении любой полосы, которая позволяет транспортному средству выполнить съезд в направлении обоих из найденного маршрута и ненайденного маршрута, и при этом имеются данные о полосе движения, которая позволяет транспортному средству съехать в направлении как на найденный маршрут, так и на ненайденный маршрут, в устройство 2 управления транспортным средством передается как информация о пригодности бокового съезда на маршрут, так и информация пригодности бокового съезда не на маршрут. Таким образом, вариант осуществления настоящего изобретения может указывать тип точки разветвления на основании как информации о пригодности бокового съезда на маршрут, так и информации о пригодности бокового съезда не на маршрут, независимо от конфигурации точки разветвления, которая не могла бы быть различена устройством 2 управления транспортным средством только в соответствии с информацией о пригодности бокового съезда на маршрут для каждой полосы движения, имеющейся в точке разветвления. Таким образом, транспортное средство может надлежащим образом направляться в соответствии с типом указанной точки разветвления.
[0064]
При сравнении информации о пригодности бокового съезда на маршрут и информации о пригодности бокового съезда не на маршрут для соответствующих полос движения, имеющихся в точке разветвления, и отсутствуют данные в отношении полосы движения, которая позволила бы транспортному средству съехать в направлении как найденного маршрута, так и ненайденного маршрута, в устройство 2 управления транспортным средством передается направляющая информация, по выбору включающая в себя информацию о пригодности бокового съезда на маршрут, без включения информации о пригодности бокового съезда не на маршрут. Затем устройство 2 управления транспортным средством управляет транспортным средством таким образом, чтобы оно двигалось в полосе движения, для которой определено, что она позволяет транспортному средству выполнить съезд в соответствии с информацией о пригодности бокового съезда на маршрут, чтобы надлежащим образом направить транспортное средство на найденный маршрут. Поскольку информация о пригодности бокового съезда на маршрут передается по выбору без информации о пригодности бокового съезда не на маршрут, может быть уменьшен объем передаваемых данных за счёт информации о пригодности бокового съезда не на маршрут, таким образом, что нагрузка на сеть связи, такую как шина CAN, соединяющая устройство 1 формирования направляющей информации и устройство 2 управления транспортным средством, может быть уменьшена.
[0065]
В случае участка дороги, проиллюстрированного на фиг. 4А, устройство 2 управления транспортным средством осуществляет управление, для направления транспортного средства 100 до достижения точки разветвления, в полосу L24 движения, разветвляющуюся на ответвление дороги BR2 через точку разветвления, как проиллюстрировано на фиг. 7, чтобы позволить транспортному средству 100 беспрепятственно съехать на ответвление дороги BR2. Кроме того, перед достижением точки разветвления блок 15 управления представлением представляет направляющую информацию для пользователя посредством индикации или речевого сигнала, направляя транспортное средство в полосу L24 движения, разветвляющуюся на ответвление дороги BR2 через точку разветвления, как проиллюстрировано на фиг. 8А, так что пользователь может управлять транспортным средством для плавного съезда на ответвление дороги BR2 в соответствии с направляющей информацией.
[0066]
(Другие варианты осуществления)
Хотя настоящее изобретение было описано выше с обращением к варианту осуществления, следует понимать, что настоящее изобретение не подразумевается ограниченным описанием и чертежами, составляющими часть данного описания. Различные альтернативные варианты осуществления, примеры и технические применения будут очевидны специалистам в данной области техники в соответствии с данным описанием.
[0067]
Например, вышеупомянутый вариант осуществления был проиллюстрирован для случая, когда ответвление дороги BR2 ответвляется вправо от главной дороги MR2, как показано на фиг. 4А, но также может применяться и в случае точки разветвления, в которой ответвление дороги BR2 ответвляется влево от главной дороги MR2, как проиллюстрировано на фиг. 11А. Если ответвление дороги BR2, как проиллюстрировано на фиг. 11А, является найденным маршрутом, блок 14 формирования направляющей информации сравнивает информацию IL2 о пригодности бокового съезда на маршрут и информацию IL4 о пригодности бокового съезда не на маршрут для соответствующих полос L21, L22, L23 и L24 движения, имеющихся в точке разветвления, таким образом, что для полосы L22 движения определено, что она позволяет транспортному средству выполнить съезд как на найденный маршрут, так и на ненайденный маршрут, как проиллюстрировано на фиг. 11В. Затем блок 14 формирования направляющей информации передает в устройство 2 управления транспортным средством как информацию IL2 о пригодности бокового съезда на маршрут, так и информацию IL4 о пригодности бокового съезда не на маршрут. Таким образом, устройство 2 управления транспортным средством, управляет транспортным средством таким образом, чтобы оно двигалось по полосе L21 движения, разветвляющейся на ответвление дороги BR2 через точку разветвления, избегая при этом движения в полосе L22 движения до достижения точки разветвления, в соответствии с информацией IL2 о пригодности бокового съезда на маршрут и информацией IL4 о пригодности бокового съезда не на маршрут.
[0068]
Вариант осуществления также может быть применен к случаю, когда не только полоса L23 движения, смежная с полосой L24 движения, разветвляющейся на ответвление дороги BR2 через точку разветвления, но также и полоса L22 движения, смежная с полосой L23 движения с левой стороны, позволяют транспортному средству съехать на ответвление дороги BR2 в точке разветвления, как проиллюстрировано на фиг. 12А. Если ответвление дороги BR2, как проиллюстрировано на фиг. 12A, является найденным маршрутом, блок 14 формирования направляющей информации сравнивает информацию IL2 о пригодности бокового съезда на маршрут и информацию IL4 о пригодности бокового съезда не на маршрут для соответствующих полос L21, L22, L23 и L24 движения, имеющихся в точке разветвления, таким образом, что для полос L22 и L23 движения определено, что они позволяют транспортному средству съехать в направлении как на найденный маршрут, так и на ненайденный маршрут, как проиллюстрировано на фиг. 12B. Затем блок 14 формирования направляющей информации передает в устройство 2 управления транспортным средством как информацию IL2 о пригодности бокового съезда на маршрут, так и информацию IL4 о пригодности бокового съезда не на маршрут. Таким образом, устройство 2 управления транспортным средством управляет транспортным средством так, чтобы оно двигалось по полосе L24 движения, разветвляющейся на ответвление дороги BR2 через точку разветвления, избегая при этом движения по полосам L22 и L23 движения до достижения точки разветвления в соответствии с информацией IL2 о пригодности бокового съезда на маршрут и информацией о пригодности бокового съезда не на маршрут.
[0069]
Вариант осуществления может быть применен к любым конфигурациям в отношении главной дороги и ответвления дороги, которые включают в себя по меньшей мере одну полосу движения. Например, вышеупомянутый вариант осуществления был проиллюстрирован для случая, в котором только полоса L24 движения разветвляется в ответвление дороги BR2 через точку разветвления на участке дороги, как проиллюстрировано на фиг. 4А, но также может применяться к случаю, в котором множество (две) полосы L23 и L24 движения разветвляются на ответвление дороги BR2, как проиллюстрировано на фиг. 13А. Когда ответвление дороги BR2, как проиллюстрировано на фиг. 13А, является найденным маршрутом, блок 14 формирования направляющей информации сравнивает информацию IL2 о пригодности бокового съезда на маршрут и информацию IL4 о пригодности бокового съезда не на маршрут для соответствующих полос L21, L22, L23 и L24 движения, имеющихся в точке разветвления, таким образом, что для полосы L22 движения определено, что она позволяет транспортному средству съехать как на найденный маршрут, так и на ненайденный маршрут, как проиллюстрировано на фиг. 13В. Затем блок 14 формирования направляющей информации передает в устройство 2 управления транспортным средством как информацию IL2 о пригодности бокового съезда на маршрут, так и информацию IL4 о пригодности бокового съезда не на маршрут. Таким образом, устройство 2 управления транспортным средством управляет транспортным средством, чтобы оно двигалось либо по полосе L23 движения, либо по полосе L24 движения, разветвляющейся на ответвление дороги BR2 через точку разветвления, избегая при этом движения в полосе L22 движения до достижения точки разветвления в соответствии с информацией IL2 о пригодности бокового съезда на маршрут и информация IL4 о пригодности бокового съезда не на маршрут.
[0070]
Вариант осуществления также может быть применен к случаю, в котором главная дорога MR2 включает в себя перед точкой разветвления только две полосы L21 и L22 движения, и полоса L22 движения разветвляется на ответвление дороги BR2 через точку разветвления, как проиллюстрировано на фиг. 14А. Когда ответвление дороги BR2, как проиллюстрировано на фиг. 14A, является искомым маршрутом, блок 14 формирования направляющей информации сравнивает информацию IL2 о пригодности бокового съезда на маршрут и информацию IL4 о пригодности бокового съезда не на маршрут для соответствующих полос L21 и L22 движения, имеющихся в точке разветвления, таким образом, что для полосы L21 движения определено, что она позволяет транспортному средству выполнить съезд как на найденный маршрут, так и на ненайденный маршрут, как проиллюстрировано на фиг. 14В. Затем блок 14 формирования направляющей информации передает в устройство 2 управления транспортным средством как информацию IL2 о пригодности бокового съезда на маршрут, так и информацию IL4 о пригодности бокового съезда не на маршрут. Таким образом, устройство 2 управления транспортным средством управляет транспортным средством, чтобы оно двигалось по полосе L22 движения, разветвляющейся на ответвление дороги BR2 через точку разветвления, избегая при этом движения в полосе L21 движения до достижения точки разветвления, в соответствии с информацией IL2 о пригодности бокового съезда на маршрут и информацией IL4 о пригодности бокового съезда не на маршрут.
[0071]
Вариант осуществления также может применяться к случаю, в котором полоса L24 движения, разветвляющаяся на ответвление дороги BR2 через точку разветвления, появляется непосредственно перед точкой разветвления, как проиллюстрировано на фиг. 15. Информация IL2 о пригодности бокового съезда на маршрут и информация IL4 о пригодности бокового съезда не на маршрут также извлекаются таким же образом, что и для точки разветвления, как проиллюстрировано на фиг. 6А. Блок 14 формирования направляющей информации сравнивает информацию IL2 о пригодности бокового съезда на маршрут и информацию IL4 о пригодности бокового съезда не на маршрут таким образом, что для полосы L23 движения определяется, что она позволяет транспортному средству выполнить съезд в направлении как на найденный маршрут, так и на ненайденный маршрут. Затем блок 14 формирования направляющей информации передает в устройство 2 управления транспортным средством как информацию IL2 о пригодности бокового съезда на маршрут, так и информацию IL4 о пригодности бокового съезда не на маршрут. Таким образом устройство 2 управления транспортным средством управляет транспортным средством так, чтобы оно выполнило смену полосы движения с полосы L23 движения на полосу L24 движения в положении P4 появления полосы L24 движения, например, до достижения точки разветвления в соответствии с информацией IL2 о пригодности бокового съезда на маршрут и информацией IL4 о пригодности бокового съезда не на маршрут.
[0072]
Вариант осуществления может быть применен к любому типу главной дороги и ответвления дороги, таким как скоростная автомагистраль, местная дорога и платная дорога. Вариант осуществления также может быть применен в случае участка дороги, включающего в себя два ответвления дороги, ответвляющихся от главной дороги с обеих сторон. Хотя вышеприведенный вариант осуществления проиллюстрирован на примере, в котором транспортным средством, движущимся по полосе L23 движения, осуществляется управление (ему разрешается) для съезда на ответвление дороги BR2 в соответствии с правилами дорожного движения на участке дороги, как проиллюстрировано на фиг. 4A, вариант осуществления также может быть применен к случаю, в котором направление движения в полосе L23 движения не ограничено правилами дорожного движения, таким образом, чтобы также направить транспортное средство в полосу L24 движения до достижения точки разветвления для плавного съезда на ответвление дороги BR2.
[0073]
Следует понимать, что настоящее изобретение включает в себя различные варианты осуществления, не раскрытые в данном документе. Следовательно, технический объем настоящего изобретения определяется только объектом изобретения в соответствии с формулой изобретения, разумно выведенной из вышеприведённого описания.
СПИСОК УСЛОВНЫХ ОБОЗНАЧЕНИЙ
[0074]
1 УСТРОЙСТВО ФОРМИРОВАНИЯ НАПРАВЛЯЮЩЕЙ ИНФОРМАЦИИ
2 УСТРОЙСТВО УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ
3 ДАТЧИК
4 УСТРОЙСТВО ВВОДА
5 УСТРОЙСТВО ВЫВОДА
6 ИСПОЛНИТЕЛЬНЫЙ МЕХАНИЗМ
7 ЗАПОМИНАЮЩЕЕ УСТРОЙСТВО
11 БЛОК ВЫЧИСЛЕНИЯ ПОЛОЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА
12 БЛОК УСТАНОВКИ ПУНКТА НАЗНАЧЕНИЯ
13 БЛОК ПОИСКА МАРШРУТА
14 БЛОК ФОРМИРОВАНИЯ НАПРАВЛЯЮЩЕЙ ИНФОРМАЦИИ
15 БЛОК УПРАВЛЕНИЯ ПРЕДСТАВЛЕНИЕМ
31 ПРИЕМНИК
32 ДАТЧИК СКОРОСТИ ТРАНСПОРТНОГО СРЕДСТВА
33 ДАТЧИК УСКОРЕНИЯ
34 ГИРОСКОПИЧЕСКИЙ ДАТЧИК
35 КАМЕРА
36 РАДАР
37 ЛАЗЕРНЫЙ СКАНЕР
51 БЛОК ОТОБРАЖЕНИЯ
52 ГРОМКОГОВОРИТЕЛЬ
61 ИСПОЛНИТЕЛЬНЫЙ МЕХАНИЗМ УСКОРЕНИЯ
62 ИСПОЛНИТЕЛЬНЫЙ МЕХАНИЗМ ЗАМЕДЛЕНИЯ
63 ИСПОЛНИТЕЛЬНЫЙ МЕХАНИЗМ РУЛЕВОГО УПРАВЛЕНИЯ
100 ТРАНСПОРТНОЕ СРЕДСТВО.

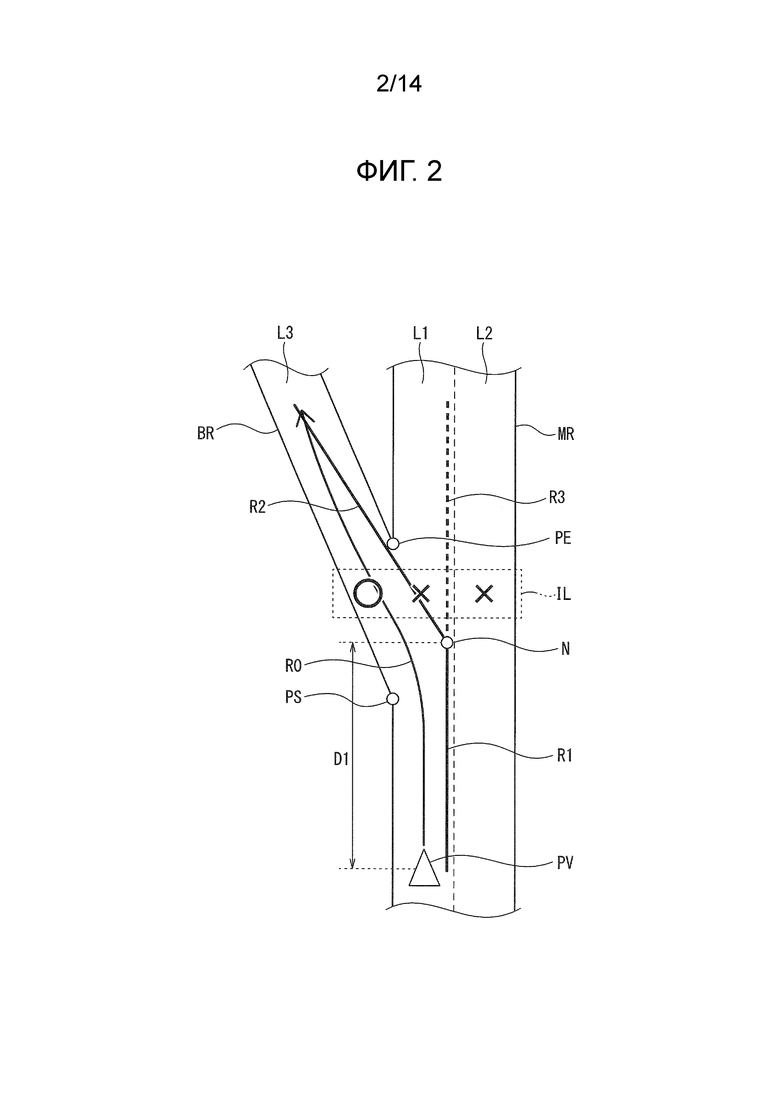



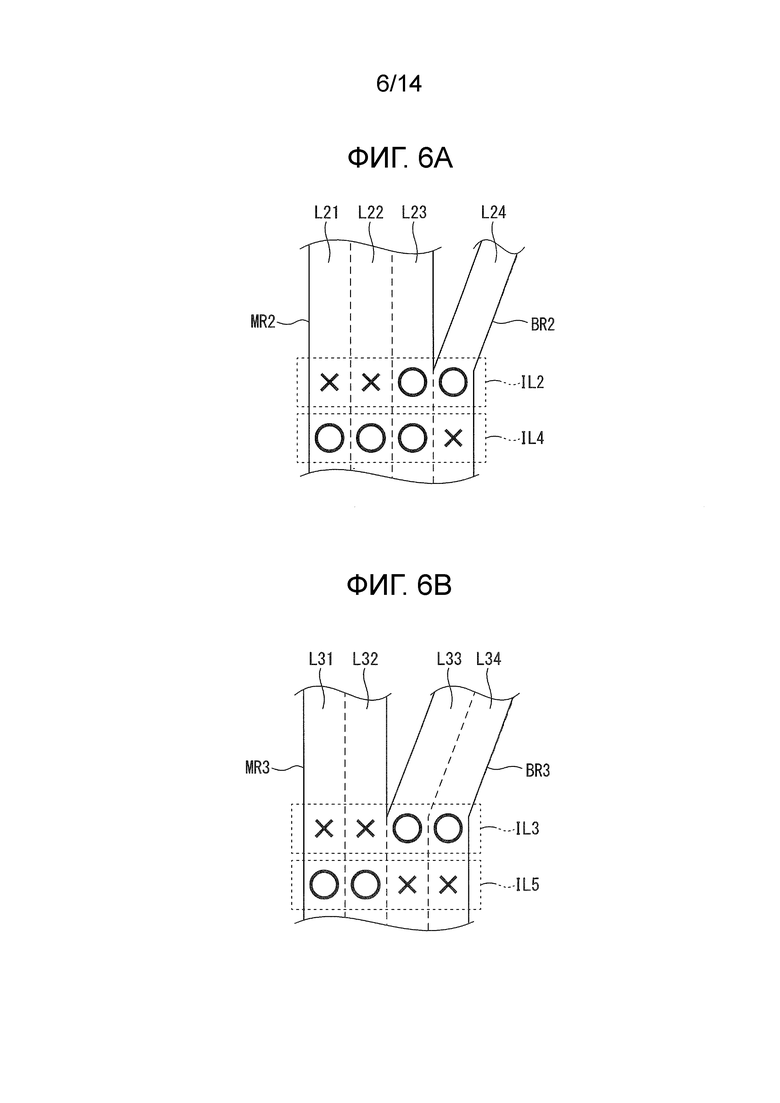



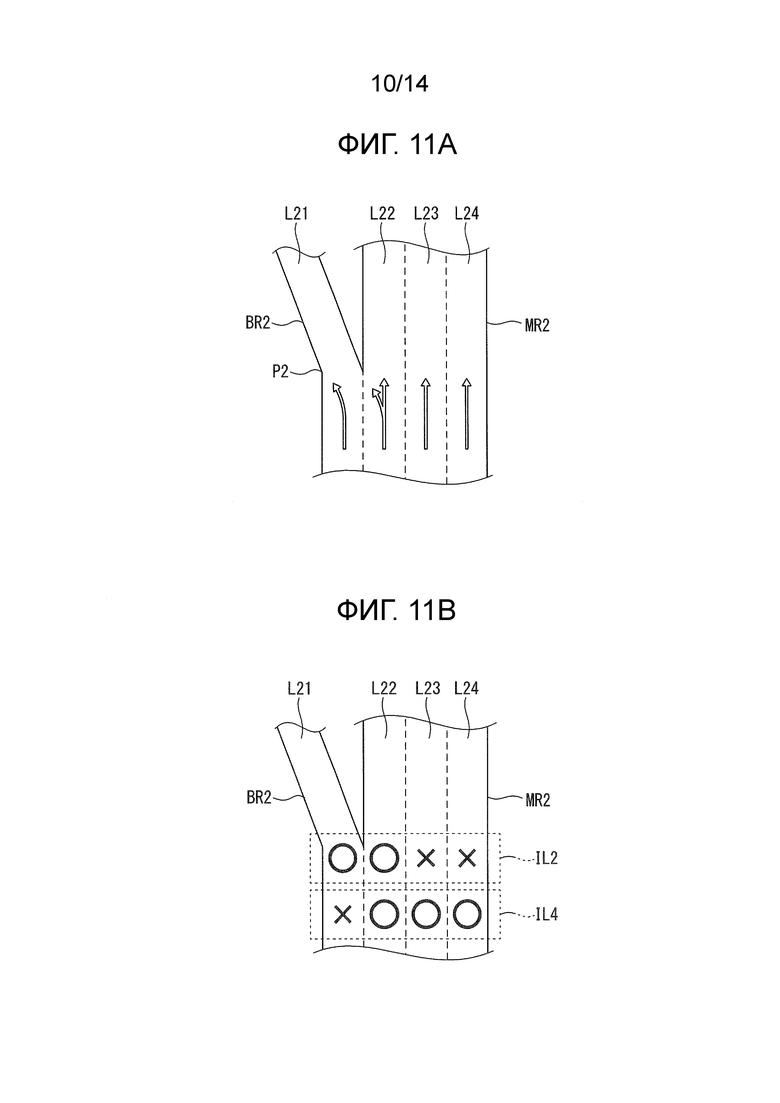
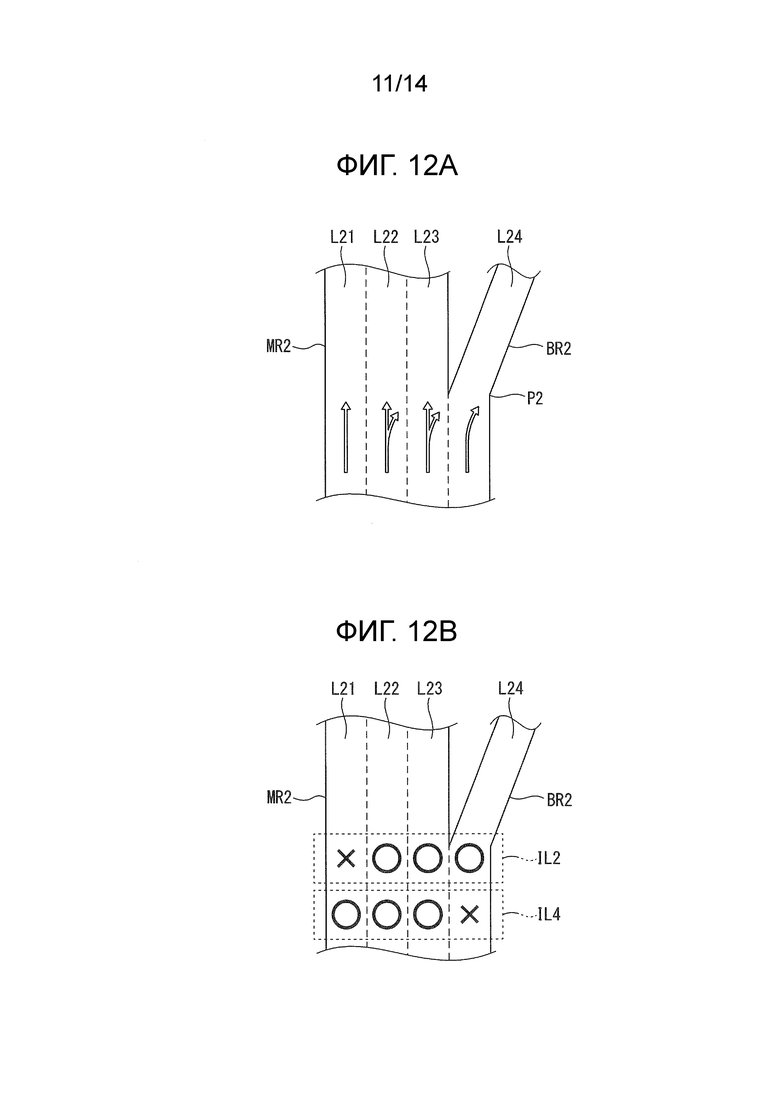

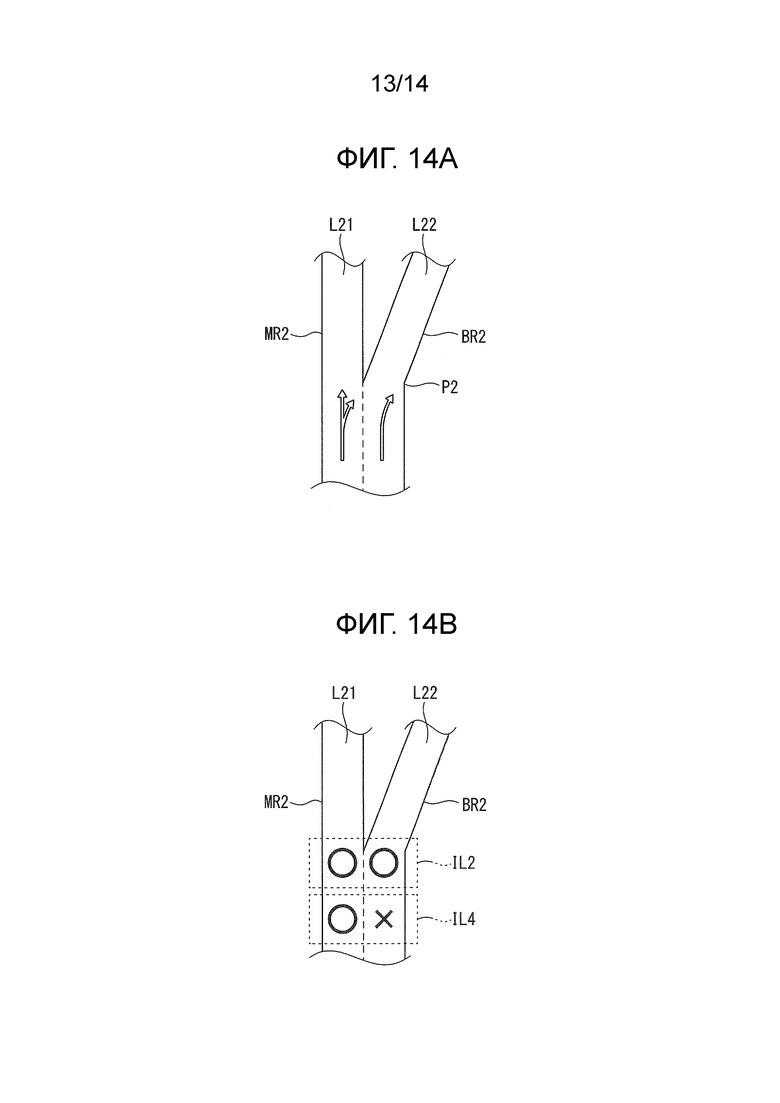

Изобретение относится к способу и устройству помощи при вождении. Способ помощи при вождении содержит этапы, на которых побуждают схему управления выполнять поиск в картографических данных, сохраненных в запоминающем устройстве, на предмет маршрута по дороге, по которой, как предполагается, следует транспортное средство и направляют транспортное средство в полосу движения, разветвляющуюся на ответвление дороги, когда предполагается, что транспортное средство направляется на ответвление дороги и имеется полоса движения, для которой определено, что она позволяет транспортному средству осуществить съезд в направлении обоих маршрутов. На участке дороги, на котором одна из смежных двух полос движения на главной дороге разветвляется на ответвление дороги через точку разветвления, а другая полоса движения относится к главной дороге после прохождения точки разветвления, когда транспортное средство достигает точки в пределах заданного расстояния от точки разветвления, сравнивают информацию о пригодности бокового съезда на маршрут, указывающую пригодность для выполнения съезда на найденный маршрут для каждой полосы движения, имеющейся в точке разветвления, с информацией о пригодности бокового съезда не на маршрут, указывающей пригодность для выполнения съезда на маршрут, отличный от найденного маршрута, для каждой полосы движения, чтобы определить, имеется ли какая-либо полоса движения, позволяющая транспортному средству выполнить съезд в направлении как найденного маршрута, так и другого маршрута. Достигается повышение удобства управления транспортным средством. 2 н. и 4 з.п. ф-лы, 24 ил.
1. Способ помощи при вождении, содержащий этапы, на которых:
побуждают схему управления выполнять поиск в картографических данных, сохраненных в запоминающем устройстве, на предмет маршрута по дороге, по которой, как предполагается, следует транспортное средство; и
на участке дороги, на котором одна из смежных двух полос движения на главной дороге разветвляется на ответвление дороги через точку разветвления, а другая полоса движения относится к главной дороге после прохождения точки разветвления, когда транспортное средство достигает точки в пределах заданного расстояния от точки разветвления, сравнивают информацию о пригодности бокового съезда на маршрут, указывающую пригодность для выполнения съезда на найденный маршрут для каждой полосы движения, имеющейся в точке разветвления, с информацией о пригодности бокового съезда не на маршрут, указывающей пригодность для выполнения съезда на маршрут, отличный от найденного маршрута, для каждой полосы движения, чтобы определить, имеется ли какая-либо полоса движения, позволяющая транспортному средству выполнить съезд в направлении как найденного маршрута, так и другого маршрута; и
направляют транспортное средство в полосу движения, разветвляющуюся на ответвление дороги, когда предполагается, что транспортное средство направляется на ответвление дороги и имеется полоса движения, для которой определено, что она позволяет транспортному средству осуществить съезд в направлении обоих маршрутов.
2. Способ помощи при вождении по п.1, дополнительно содержащий этап, на котором:
если имеется полоса движения, для которой определено, что она позволяет транспортному средству выполнить съезд в направлении обоих маршрутов, передают информацию о пригодности бокового съезда на маршрут и информацию о пригодности бокового съезда не на маршрут в устройство управления транспортным средством для управления транспортным средством.
3. Способ помощи при вождении по п.2, в котором, если нет полосы движения, для которой определено, что она позволяет транспортному средству осуществить съезд в направлении обоих маршрутов, информацию о пригодности бокового съезда на маршрут по выбору передают в устройство управления транспортным средством для управления транспортным средством.
4. Способ помощи при вождении по любому из пп.1-3, дополнительно содержащий этап, на котором управляют транспортным средством таким образом, чтобы оно направлялось в полосу движения, разветвляющуюся на ответвление дороги.
5. Способ помощи при вождении по любому из пп.1-4, дополнительно содержащий этап, на котором представляют направляющую информацию для направления транспортного средства в полосу движения, разветвляющуюся на ответвление дороги.
6. Устройство помощи при вождении, содержащее:
запоминающее устройство, хранящее картографические данные; и
схему управления, выполненную с возможностью поиска в картографических данных на предмет маршрута на дороге, по которой, как предполагается, следует транспортное средство,
при этом на участке дороги, на котором одна из смежных двух полос движения на главной дороге разветвляется на ответвление дороги через точку разветвления, а другая полоса движения относится к главной дороге после прохождения точки разветвления, когда транспортное средство достигает точки в пределах заданного расстояния от точки разветвления, информация о пригодности бокового съезда на маршрут, указывающая пригодность для выполнения съезда на найденный маршрут для каждой полосы движения, имеющейся в точке разветвления, сравнивается с информацией о пригодности бокового съезда не на маршрут, указывающей пригодность для выполнения съезда на маршрут, отличный от найденного маршрута, для каждой полосы движения, чтобы определить, имеется ли какая-либо полоса движения, позволяющая транспортному средству выполнить съезд в направлении как найденного маршрута, так и другого маршрута; и
транспортное средство направляется в полосу движения, разветвляющуюся на ответвление дороги, когда предполагается, что транспортное средство направляется на ответвление дороги и имеется полоса движения, для которой определено, что она позволяет транспортному средству осуществить съезд в направлении обоих маршрутов.
| Колосоуборка | 1923 |
|
SU2009A1 |
| Колосоуборка | 1923 |
|
SU2009A1 |
| УСТРОЙСТВО ПОМОЩИ В ВОЖДЕНИИ ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА И СПОСОБ ПОМОЩИ В ВОЖДЕНИИ ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2014 |
|
RU2624373C1 |

