Изобретение относится к области робототехники и может быть использовано, например, в спасательных операциях, космической индустрии, водолазном деле и т.д.
Технический результат: повышение качества управления роботом.
Сущность изобретения: данные об угловых ориентациях головы и таза относительно грудного отдела антропоморфного робота передаются по каналу связи на следящий механизм подвеса, который придает голове и тазу человека-оператора аналогичные угловые ориентации относительно грудного отдела человека-оператора, в свою очередь человек-оператор, оказывая силовые воздействия своей головой и своим тазом на внутренние поверхности жесткого шлема и жестких трусов, может необходимым образом изменять угловые ориентации головы и таза робота.
В шее человека имеется 7 позвонков (соответственно к каждому такому позвонку крепится по нескольку мышц, ответственных за их движения) - все это позволяет человеку наклонять и поворачивать голову. Это весьма сложная система, как по механике, так и по сигналам управления, см. фиг. №1 - изображение взято из Интернета, где показаны скелет шейного отдела (семь шейных позвонков закрашены более насыщенным цветом), наклон головы вперед и назад показан на фиг. №2.
В этих движениях головой одновременно принимают участие много костей и мышц шеи человека - система обладает 24 степенями свободы.
Аналогичная сложная система из большого числа позвонков (спинной хребет) и соответствующий набор мышц используется природой и для осуществления движений нижней части тела (таза) человека относительно грудной клетки.
Однако изготовители антропоморфных роботов едва ли сочтут возможным применять при изготовлении своей продукции механические сочленения с абсолютно такой же сложной кинематикой и сложной системой управления как в человеческом теле (большое число степеней свободы по механике и по управляющим согласованным сигналам).
Поэтому целесообразно рассмотреть другие более простые кинематические схемы для создания антропоморфных роботов, обеспечивающие наклоны и повороты головы и таза робота относительно грудной клетки (торса) робота.
Условная кинематическая схема суставов шеи робота (скелет шейного отдела антропоморфного робота) представлена на фиг. №3.
Шея робота представлена осями вращения с буквенными обозначениями D, С, F; G - позже будут представлены математические выкладки с углами, имеющими такие же буквенные обозначения. Некоторые линии, изображающие жесткие элементы скелета шеи робота, в местах пересечения имеют утолщение - этим обозначается, что пересекающиеся линии имеют в пространстве в данном месте жесткое соединение, и напротив, линии, при пересечении которых утолщения нет, не пересекаются в пространстве.
«Треугольник», обозначенный буквами R-L-N, - это торс (грудной отдел) робота. Кинематические пары первого порядка: D (расположенная в основании шеи робота) и С (расположенная в основании черепа робота) обеспечивают наклоны «вперед - назад» головы робота - эти наклоны соответствуют наклонам «вперед - назад» головы человека, изображенным на фиг. №2.
Крестообразно к оси С в основании черепа робота располагается ось F позволяющая роботу наклонять голову из стороны в сторону в направлении левого или правого плеч (покачивать головой). Для человека такие движения выглядят так, как показано на фиг. №4.
(Вообще говоря, у человека в наклоне головы влево-вправо участвуют все позвонки шеи. Для антропоморфного робота, управляемого в копирующем режиме можно будет обойтись одним суставом в основании черепа робота, для этого есть разумные основания, о которых будет сказано ниже.)
Еще одна ось G вращения, перпендикулярная осям С и F, обеспечивает повороты головы робота налево-направо. У человека такие движения головы - соответствуют поворотам «налево - направо» вокруг вертикальной оси головы, см. фиг. №5.
Т.к. здесь обсуждается вопрос создания антропоморфного робота, повторяющего (копирующего) движения человека-оператора, и вопрос создания управляющего этим роботом костюма, то с самого начала следует подчеркнуть важный момент - движения органов человека: наклоны и повороты головы, сгибания-повороты спины и движения конечностей имеют ограничения по амплитуде углов. Так, например, повороты «налево-направо» головы человека заключены в диапазоне примерно ±45° - этот нюанс отображен на фиг. №5. Попытки превысить в управляющем костюме естественные анатомические ограничения амплитуды движения суставов несет опасность получения человеком-оператором увечья или даже смерть. Таким образом, из-за анатомии человека аналогичные ограничения по амплитудам будут наблюдаться и у антропоморфного робота, повторяющего движения человека-оператора. (Для полностью АВТОНОМНОГО антропоморфного робота с искусственным интеллектом таких ограничений нет - для такого автономного робота в принципе возможна ситуация поворотов головы и других конечностей на любой угол. Но для дистанционно управляемого антропоморфного робота, копирующего движения человека, ограничения движений по амплитуде необходимы.)
Грудной отдел (торс) антропоморфного робота может совершать повороты и наклоны относительно нижнего отдела (таза) с помощью такой кинематической схемы поясного отдела, как это показано на фиг. №6 - скелет поясного отдела антропоморфного робота. (Линии, пересекающиеся на фигуре без утолщения, не имеют пересечения.)
Линия, отмеченная буквами R-L, - таз робота, точнее это линия крепления ног робота, бедренных суставов робота, к тазу). Торс N антропоморфного робота может совершать повороты «налево-направо» относительно таза вокруг вертикальной линии за счет поворота оси G. Повороты деталей вокруг осей D и С обеспечивают роботу возможность нагибаться вперед-назад. Повороты вокруг оси F обеспечивают роботу возможность наклонять торс влево-вправо относительно таза - для человека такие движения показаны на фиг. №7.
В принципе в подобном устройстве шеи или спинного поясничного отдела антропоморфного робота нет ничего экстраординарного.
Важно другое, что мы можем попытаться воспроизвести аналогичные кинематические схемы осей вращения и в механизме подвеса, применяемого для управления антропоморфным роботом. Однако нам придется при этом позаботиться о том, чтобы оси вращения механизмов управлении (управляющего экзоскелета), надеваемых на человека, в реальности не протыкали бы тело человека-оператора, управляющего роботом. Тело человека-оператора могут «протыкать» только геометрические продолжения осей (виртуальные оси) внешних механизмов, окружающих человека-оператора.
Экзоскелет, надеваемый на человека-оператора для управления роботом, условно разделим на три части.
Первая часть: «жилет» - жесткая конструкция, по форме напоминающая майку или жилет, охватывающая грудную область тела человека-оператора, с закрепленными на ней подвижными механизмами, покрывающими верхние конечности (руки) человека-оператора, таким образом, что человек может двигать своими руками и благодаря этому дистанционно управлять в копирующем режиме манипуляторами робота, а также получать от робота по каналам связи силовые и тактильные ощущения. В описании патента на изобретение №2134193 RU имеется соответствующая фиг. (№85) с изображением заштрихованного жилета и внутреннего кольца механизма подвеса. Это изображение из патента №2134193 нам понадобится для дальнейших логических построений, поэтому я это изображение воспроизвожу в качестве фиг. №8.
Вторая часть экзоскелета: «жесткий шлем» - головной убор, надеваемый на голову человека-оператора, с устройствами отображения визуальной и аудиоинформации, получаемой от робота по каналам связи, радиопереговорным устройством, …, с возможностью управлять движениями головы робота и обратной силовой (тактильной) связью от робота на голову человека-оператора.
И третья часть экзоскелета: «брюки» - механизмы, покрывающие нижнюю часть тела человека-оператора - тазовую область и нижние конечности (ноги) с возможностью управлять движениями нижних конечностей (педикуляторов) антропоморфного робота и получать от нижних конечностей робота силовые (тактильные) ощущения.
Наша основная задача: вторую и третью части экзоскелета (жесткий шлем и брюки) прикрепить подвижно к механизму подвеса с возможностью принудительных движений их относительно грудного отдела (относительно жилета).
В данное время специалисты при разработке дистанционно управляемых антропоморфных роботов не уделяют должного внимания вопросу управления головой роботов, а также нижней части тела (таза) робота. (Кроме того, большинство исследователей, по-видимому, не имеют правильного представления о конструировании силовых экзоскелетов.) Специалисты предлагают надевать на голову человека-оператора, управляющего роботом, простые очки виртуальной реальности, демонстрирующее оператору визуальное изображение с камер-глаз робота. Специалисты предполагают, что человек-оператор, поворачивая свою голову, может поворачивать и голову робота.
Однако недостаток таких простых (без обратной силовой связи от робота к человеку) систем управления головой робота состоит в том, что внешние силовые воздействия, оказываемые на голову робота, не передаются на голову человека-оператора. При этом возможны ситуации, когда внешние силовые воздействия наклоняют или поворачивают голову робота, в то время как голова человека-оператора остается в прежнем положении - это вызывает несоответствие видеоизображения получаемого человеком-оператором и может повлечь ошибки в управлении роботом. Например, голова человека-оператора, управляющего роботом, повернута направо, а голова робота под воздействием внешних силовых воздействий повернута налево, при этом человек-оператор может ошибочно полагать, что наблюдаемое им изображение находится справа от робота, тогда, как в действительности оно находится слева.
Кроме того, силовые воздействия на голову человека-оператора необходимы для разгрузки мышц шеи человека. В качестве примера, демонстрирующего такую ситуацию можно рассмотреть длительную по времени работу робота в горизонтальном положении - приведу здесь изображения №76 и №75 из описания патента на изобретение №2134193 RU. Допустим, что рабочая обстановка требует длительного по времени горизонтального положения робота, фиг. №9.
В этом случае такое же длительное по времени горизонтальное положение должен будет занимать и человек-оператор см. фиг. №10.
При этом человеку-оператору придется длительное время держать свою голову навесу, а если учитывать, что при этом на голову человеку еще надеты и различные устройства, то становится понятно, что это вызовет излишнее напряжение мышц шеи человека-оператора, вплоть до болевых ощущений.
Таким образом, для более качественного дистанционного управления роботом необходимо передавать от робота силовые воздействия на голову человека-оператора, а также, при необходимости, с помощью силовых приводов компенсировать вес головы человека и вес надетого на голову оборудования, т.е. осуществлять разгрузку.
Для дальнейшего понимания заявленного способа вначале рассмотрим вопрос «Внутреннего и внешнего воздействия на латные, пластинчатые, доспехи». Допустим, человек одет в средневековые латы - пластинчатые доспехи. При попытке поднять руку человек воздействует поверхностью своей руки (кожей) на внутреннюю поверхность доспехов. В свою очередь внешние факторы воздействуют на наружную поверхность латных доспехов. Таким образом, средневековые металлические латы (экзоскелет) выступают своеобразной прослойкой между человеком и внешними силовыми воздействиями. При этом коэффициент усиления такого средневекового экзоскелета-доспехов равен 1 - металлические пластины в соотношении один к одному передают усилия оказываемые человеком на внешние предметы, в тоже время внешние силовые воздействия металлические пластины передают человеку.
Теперь допустим, что на человека надет современный силовой экзоскелет, позволяющий поднимать тяжелые грузы, - коэффициент усиления у такого экзоскелета больше единицы. Если человек попытается изнутри воздействовать непосредственно на силовые приводы экзоскелета для того, чтобы заставить двигаться такой экзоскелет, как до этого человек взаимодействовал со средневековыми доспехами, то мощный экзоскелет может это воздействие не почувствовать и никак не отреагировать на него. Аналогия здесь такая: мощный современный подъемный кран поднимает многотонный груз, а человек пытается управлять этим подъемным краном, непосредственно дергая за крюк или тросы - подъемный кран на такие подергивания никак не отреагирует. Все понимают, что для управления современным мощным подъемным краном не достаточно с силой дергать за тросы - необходимо легким движением руки нажать на кнопочку или повернуть рычажок на пульте управления.
Таким образом, становится очевидно, что для управления мощным силовым экзоскелетом с коэффициентом усиления больше единица необходимо внутрь между телом человеком и внешним силовым приводом экзоскелета встроить промежуточный деформируемый, чувствительный управляющий элемент. Этот чувствительный элемент будет «кнопочкой» (триггером, джойстиком), легкое нажатие на которую позволит человеку изнутри комфортно управлять силовыми приводами силового экзоскелета.
Аналогичный принцип управления, посредством внутреннего чувствительного элемента, необходимо задействовать и для организации движений жесткого шлема, надетого на голову человека-оператора, см. фиг. №11, где показан разрез упрощенной схемы устройства жесткого шлема.
Жесткий шлем состоит из двух жестких вложенных один в другой колоколообразных элементов №1 и №2.
Перед глазами человека - оператора размещается устройство №3 отображения видеоинформации, получаемой по каналам связи от робота. (Также следует упомянуть, что в жестком шлеме для облегчения дыхания должно быть отверстие, расположенное на уровне носа и рта человека-оператора - в рамках данной работы на этом моменте не акцентируется внимание, отверстие не отображается на фиг., хотя подразумевается, что оно есть.) Между жесткими колоколообразными элементами жесткого шлема находится упругий материал №4 (на фиг. он условно показан пружинками), позволяющий колоколообразным жестким элементам слегка смещаться друг относительно друга под силовыми воздействиями головы человека-оператора. Также между жесткими колоколообразными элементами жесткого шлема размещаются датчики двух типов: датчики давления №5 (на фиг. показаны закрашенным овалом: их в жестком шлеме восемь штук - два перед лицом человека-оператора, два на затылке и четыре по бокам головы, два справа и два слева), еще один датчик, на фиг. отмечен цифрой №6, располагается на макушке головы человека-оператора, этот датчик измеряет небольшие относительные вращения жестких колоколообразных элементов жесткого шлема. Таким образом, система, образованная внутренним жестким колоколообразным конструктивным элементом жесткого шлема №2, упругий заполнитель №4 и датчики №5 и №6 образует чувствительный управляющий элемент. Небольшое силовое воздействие, оказанное головой человека-оператора на внутренний жесткий колоколообразный элемент №2, вызывает его смещение относительно внешнего колоколообразного элемента. Это небольшое относительное смещение колоколообразных элементов измеряется датчиками, которые определяют направление действия и величину силы поворота или наклона головы человека-оператора. После чего электроника дает соответствующие команды на силовые приводы внешнего жесткого колоколообразного элемента жесткого шлема, и жесткий шлем наклоняется или поворачивается в том направлении, куда направлено силовое воздействие головы человека-оператора. Фиксация головы человека-оператора во внутреннем пространстве жесткого колоколообразного элемента жесткого шлема достигается не только применением подбородочного ремня, прикрепленного к элементу №2 (на фиг. №11 ремень не показан), но также с помощью герметичного пневматического раздувающегося элемента №7 (внутренний объем раздувающегося пневматического элемента конструкции заштрихован точечной штриховкой - эти хаотичные точки как бы молекулы газа). После того, как человек-оператор перед началом работы наденет на голову жесткий шлем, застегнет подбородочный ремень, и определит, что его глаза находятся напротив устройства отображения видеоинформации №3, в пневматический элемент №7 жесткого шлема подается газ под определенным давлением, величина которого такова, что фиксирует голову человека-оператора, но не слишком сильно сдавливает ее. Далее под пневматическим раздувающимся элементом №7, ближе к голове человека-оператора, находится слой №8 состоящий из волокнистого вещества (солома, пластиковая мочалка, и т.п. - на фиг. этот элемент заштрихован хаотичными линиями). Назначение слоя №8 - терморегуляция и потоудаление - через этот слой можно прокачивать воздух определенной температуры и влажности и тем самым охлаждать или обогревать голову человека-оператора. (Например, во время съемок фильма «Робокоп» была жаркая погода и главный актер Питер Уэллер, одетый в плотный костюм робота-полицейского, первоначально испытывал сильный перегрев до 38°С, близко к обмороку, теряя в массе из-за потоотделения по килограмму в день. Снимать фильм при таких условиях было физически невозможно. Положение спасли шланги с жатым воздухом, незаметно для зрителей подключаемые к костюму робота-полицейского и вентилирующие пространство между телом актера и костюмом.) Так же и в нашем случае можно закачивать воздух определенной температуры между герметичным покрытием №7 и головой человека-оператора в пористый волокнистый слой №8, тем самым регулировать потоотделение и добиваться комфортной температуры. Ну, и непосредственно к поверхности головы человека-оператора примыкает устройство нейроинтерфейса №9, позволяющее снимать энцефалограмму, - шапочка из «дышащей» ткани, в которую встроены контакты и провода (заштриховано треугольной штриховкой). Сейчас в мире довольно активно обсуждается тема управления антропоморфными роботами посредством нейроинтерфейса. На самом деле технология нейроинтерфейса не позволит качественно управлять антропоморфными роботами в полном объеме по причине их сложности и отсутствия обратной связи, но нейроинтерфейс возможно использовать для управления некритическим дополнительным второстепенным оборудованием, а также для переключения различных режимов. Именно это, возможность управления дополнительным второстепенным оборудованием и некоторыми режимами работы, и побудила меня интегрировать нейроинтерфейс в жесткий шлем. (Например, нейроинтерфейс можно использовать для переключения режимов двуногой ходьбы антропоморфного робота. Если поверхность, по которой идет робот более-менее ровная, то человек-оператор мысленным приказом с помощью нейроинтерфейса может переключить ходьбу робота в автоматический режим - робот будет сам идти по ровной поверхности и человеку-оператору не придется двигать ногами в управляющем костюме - смотрите информацию на моем Web сайте: http://streltsovaleks.narod.ru/WalklngRobots.htm - (не «просто так» я же его размещал в Интернете). Все что останется в этом случае делать человеку-оператору - это наблюдать за характеристиками подстилающей местности и мысленно, если это требуется, отдавать команду роботу изменить направление ходьбы - повернуть направо или налево. В таком автоматическом режиме копирующий антропоморфный робот будет двигаться до тех пор, пока человек-оператор не сочтет целесообразным взять управление на себя - для этого человеку опять же с помощью нейроинтерфейса будет достаточно отдать соответствующую мысленную команду. Можно для управления роботом использовать и другие методы, в том числе и без использования автоматических режимов. Но в этом случае будет целесообразно разделение труда управляющего персонала в зависимости от квалификации. Допустим, один человек-оператор является дефицитным специалистом - сварщиком высокой квалификации, а другой человек-оператор, управляющий дистанционным антропоморфным роботом, не умеет навыков использования сваркой. Пусть, например, стоит задача отправить робота куда-то далеко и устранить аварию - провести на рабочем месте сварочные работы. Тогда мы можем использовать человека-оператора с низкой квалификацией в качестве «пешехода на дальние дистанции» - он доведет своими ногами дистанционно управляемого антропоморфного робота до места работы, а затем передаст управление роботом более квалифицированному специалисту - сварщику. После завершения сварочных работ дистанционное управление антропоморфным роботом опять передается сотруднику с низкой квалификации - он сможет вернуть робота на место исходной дислокации, а дефицитный специалист-сварщик в это время может управлять каким-нибудь другим роботом в другом месте…) Так же следует отметить, что внутренний раздувающийся пневматический объем, применяемый в жестком шлеме для фиксации головы человека (а далее по тексту и в жестких трусах экзоскелета для фиксации тазовой области человека и других частей тела) удобен тем, что жесткий шлем (жесткие трусы) не будут сильно хлябать. Внутренний раздувающийся объем позволяет на разные по размеру головы (на нижние части туловища) плотно надеть один и тот же жесткий шлем (жесткие трусы) большого размера. Без использования пневматики было бы трудно подобрать для разных по объему операторов индивидуальные жесткие шлемы и жесткие трусы, точно соответствующие размерам - потребовалась бы слишком большая коллекция этих жестких элементов.
Для задания пространственной ориентации головы человека-оператора (наклонов и поворотов относительно торса) может использоваться манипулятор, берущий свое начало в ранце за спиной у человека-оператора и осуществляющий силовые движения жесткого шлема. Упрощенная схема такого манипулятора показана на фиг. №12.
Где мы видим человека-оператора, на голову которого надет жесткий шлем с устройством, демонстрирующим оптическое изображение (устройство - виртуальны очки, размещено перед глазами человека-оператора). Сзади к жесткому шлему подходит манипулятор, состоящий из системы жестких стержней, выполненных с возможностью принудительного вращения друг относительно друга на определенные углы. Указанный механический манипулятор берет свое начало в ранце за спиной у человека-оператора - на рисунке в точке "О". Любые наклоны вперед-назад головы человека оператора задаются изменением значений углов "О", "А", "B" в подвижных сочленениях (в суставах "О", "A", "B") манипулятора.
Следует отметить, что на фиг. №12 показаны элементы манипулятора, ответственные ТОЛЬКО за наклоны вперед-назад головы человека оператора. Механизмы, позволяющие поворачивать голову вправо-влево и наклонять голову в сторону плеч: к правому плечу или к левому плечу, здесь пока что не рассматриваются, чтобы не усложнять приведенные ниже математические построения. Механизмы, ответственные за повороты головы и наклоны в сторону плеч (два дополнительных сустава) будут рассмотрены позже.
Теперь рассмотрим математику, позволяющую вычислять значения углов "О", "А", "B", необходимых для задания какого-то конкретного наклона вперед - назад головы человека-оператора. Для этих целей перечертим фиг. №12, удалив из нее несущественные, отвлекающие, элементы - это делается для того, чтобы упростить рассмотрение (я удалил изображения человека-оператора и жесткого шлема) - см. фиг. №13.
Для дальнейших вычислений в точке основания манипулятора "О" вводим систему координат X,O,Y.
Известные нам величины:
Вектор  - длина шеи человека-оператора - расстояние от основания шеи (точка "D" до основания черепа (точка "С");
- длина шеи человека-оператора - расстояние от основания шеи (точка "D" до основания черепа (точка "С");
Вектор r - расстояние от основания черепа человека-оператора до затылка жесткого шлема, это расстояние немного больше радиуса окружности жесткого шлема, надеваемого на голову человеку-оператору;
Нам также известны длины жестких элементов манипулятора h и е, а также расстояние вектор b, проведенный от основания манипулятора (точка О) до основания шеи человека-оператора (точка D).
Задача:
Найти математические формулы, необходимые для вычисления значение трех величин - углов О, А и В в подвижных сочленениях (в суставах О, А и В) манипулятора, которые в совокупности позволяют однозначно задавать наклоны вперед-назад головы человека-оператора (параметры-углы D и С). Т.е. нам известны углы D и С, необходимо найти формулы для вычисления величин углов О, А, В.
Направление отсчета большинства углов выберем против часовой стрелки, как это традиционно принято в математике.
Из фиг. №14 видно, что в системе координат X,O,Y:
В компонентах:

Тогда квадрат длины вектора ОВ равен:

Далее, зная квадрат длины вектора ОВ и воспользовавшись для треугольника ОАВ теоремой косинусов можно найти величину искомого угла А:
Теперь найдем значение вспомогательного угла u - наклон вектора ОВ по отношению к оси X введенной нами системы координат X,O,Y:
Из приведенной фиг. №14 видно, что второй вспомогательный угол V можно найти из треугольника ОАВ с помощью теоремы синусов:
Теперь можно вычислить величину второго искомого угла О:
Таким образом, мы смогли найти общие формулы для вычисления двух из трех искомых углов. Выведем формулы для вычисления значения третьего угла. Для этого воспользуемся еще одной фиг. №15.
Из приведенной фиг. видно, что угол В можно получить из треугольника ABC с помощью теоремы косинусов.
Но для этого вначале необходимо через компоненты в системе координат X,O,Y выразить квадрат длины вектора АС:

Отсюда получим угол В:
Эта формула для вычисления значения угла В правильная, при условии, что сустав В манипулятора находится ниже вектора АС (точка В находится левее вектора АС, если наблюдатель будет из точки А смотреть вдоль вектора АС). Однако возможны случаи (см. предыдущие фиг. №13 и №14), когда сустав В манипулятора находится выше вектора АС (точка В находится справа от вектора АС, если наблюдатель будет из точки А смотреть вдоль вектора АС) - в этом случае угол В необходимо вычислять уже по другой формуле.
Для внесения соответствующих поправок в вычисления значения угла В найдем наклон вектора АС относительно оси X системы координат X,O,Y, как тангенс угла наклона.
Расстояние между точками А и С по оси X запишется так:

Высоты точки А и точки С по отношению к оси X:

Таким образом, тангенс k угла наклона вектора АС по отношению к оси ОХ равен:
Тогда уравнение прямой, проходящей вдоль вектора АС, в системе координат XOY:

где:

- проекция вектора С на ось X - величина, зависящая от угла D. В дальнейших вычислениях предполагается, что Сх<О - шея короче, чем расстояние от основания шеи до основания манипулятора О.
Следовательно, если точка В (сустав В манипулятора) находится над вектором АС (точка В лежит справа от вектора АС, если на нее смотреть из точки А вдоль вектора АС), то в соответствии с формулой №5 выполняться неравенство:

где: ОВу и ОВх - компоненты вектора ОВ, полученные ранее (см. формулы №1).
Если только что записанное неравенство №15 выполняется, то вычисление величины угла В следует производить по формуле:

где В - значение, ранее полученное в формуле №9.
Все эти вышеприведенные математические формулы легко трансформировать в соответствующий простой алгоритм.
Таким образом, мы получили необходимые формулы, позволяющие вычислять значения углов О, А, В и тем самым имеем возможность принудительно задавать наклоны вперед-назад головы человека-оператора на углы D и С, см. фиг. №2, с помощью манипулятора, берущего начало в ранце за спиной у человека-оператора.
Теперь рассмотрим технические возможности для осуществления наклонов головы человека-оператора в сторону левого или правого плеч, подобных тем, как это изображено на фиг. №4.
Задать такие наклоны для жесткого шлема (и соответственно для находящейся в нем головы человека-оператора, управляющего роботом) можно путем принудительных поворотов жесткого шлема вокруг геометрической оси вращения, проходящей от затылка к лицу человека через основание черепа головы человека оператора, см. фиг. №16.
Фиг. №16 является модификацией фиг. №12 - на ней добавлена ось "F", т.е. в конструкцию манипулятора, поддерживающего жесткий шлем, необходимо добавить еще один сустав между суставом "В" и жестким шлемом. Этот сустав и будет наклонять жесткий шлем и заключенную в него голову человека-оператора в сторону плеч.
Можно было бы попытаться добавить в устройство манипулятора еще одну степень свободы (ось вращения) в точке "О" манипулятора (на фиг. №16 эта дополнительная ось вращения также показана, но пунктирными линиями-стрелками). Действительно, в наклонах головы в сторону плеч у человека участвует вся шея и, казалось бы, будет логично для обеспечения большей подвижности, в конструкцию антропоморфного робота и в управляющее устройство внести еще по одному подвижному элементу. Однако это может оказаться излишним. Дело в том, что жесткий шлем все-таки будет иметь довольно большие размеры. А на плечах человека-оператора, управляющего роботом, окажутся механизмы (приводы) экзоскелета, ответственные за организацию движений рук робота. И как бы мы не пытались прижать приводы к телу человека и сделать их компактными они все равно будут «бугриться стальными мышцами на плечах человека-оператора». Поэтому еще" одна степень свободы (еще одна механическая ось вращения) может оказаться бесполезной - жесткий шлем, при его большой подвижности, просто упрется в другие элементы управляющего костюма и мы в реальности не получим никакого увеличения подвижности головы, а только излишнее усложнение конструкции робота и механизмов управления. Для человека-оператора небольшое ограничение в подвижности (отсутствие оси вращения в основании шеи) по индивидуальным ощущениям не сильно скажется по причине того, что в жестком шлеме используются упругие элементы (упругий слой между жесткими колоколообразными деталями жесткого шлема и пневматическая фиксация головы). Поэтому между головой человека-оператора и жестким шлемом возникнет «упругий люфт», который нивелирует ощущение ограничения подвижности в механизме управления.
Повороты жесткого шлема и головы человека-оператора налево-направо вокруг вертикальной оси тела аналогичные тем, которые изображены на фиг. №5, задаются добавлением в конструкцию жесткого шлема еще одной оси вращения G, которая расположена в темени (на макушке) жесткого шлема см. фиг. №17, где изображена окончательная кинематическая схема задания движений жесткого шлема (головы человека-оператора).
Таким образом, путем изменения значений углов О, А, В, F и G в суставах манипулятора, поддерживающего жесткий шлем, можно задать необходимую ориентацию головы человека-оператора. В свою очередь человек-оператор оказывая изнутри силовые воздействия на жесткий шлем, может изменить его пространственную ориентацию и пространственную ориентацию головы дистанционно управляемого робота.
Применение манипулятора позволяет учитывать индивидуальные особенности строения тела любого человека-оператора - сутулость, короткую или длинную шею, учет амплитуды углов сгибания суставов и подстраиваться персонально под каждого человека. Однако манипулятор, изображенный на фиг. №17, имеет недостатки, поэтому позже будет показана еще две устройства с кардановыми подвесами, обеспечивающие необходимую пространственную ориентацию жесткого шлема. Также есть возможность организовать повороты налево-направо жесткого шлема (и головы человека-оператора) вокруг вертикальной оси не путем установки оси вращения на макушке жесткого шлема, а установив на уровне основания черепа человека-оператора систему поворота в сам жесткий шлем - секторный подшипник. Это сделает внешний вид жесткого шлема более компактным - сверху на макушке жесткого шлема не будет выпирать ось вращения, однако подобное техническое решение усложнит конструкцию жесткого шлема. - Здесь главное для головы соблюдать принцип: вначале наклоняем голову по отношению к телу (по отношению к грудному отделу), а затем поворачиваем направо или налево.
Теперь рассмотрим вопрос задания необходимых поворотов и наклонов нижнего отдела экзоскелета, ответственного за движения таза (брюк) человека-оператора. Один из вариантов такого устройства представлен ниже см. фиг. №18.
Где показаны сразу две проекции устройства: сверху - вид слева, снизу - вид спереди.
Жесткие трусы №1 (нечто подобное женскому средневековому «Поясу верности», впрочем, для современных водолазов, работающих в жестких глубоководных скафандрах, к металлическим штанам не привыкать - можно, кстати, жесткие трусы выполнить жесткими частично - нам важны жесткие элементы жестких трусов в их верхней части - от пояса до бедер, а между ног можно пропустить элемент из обычной эластичной ткани), надеваемые на человека-оператора, имеют сзади, в районе копчика, крепление к манипулятору O'A'B'F', аналогичному по принципу устройства и математике манипулятору, рассмотренному выше для задания наклонов вперед-назад головы человека-оператора, одетую в жесткий шлем (поэтому на фиг. №18 манипулятор имеет тоже буквенные обозначения, но только со штрихами, что и на предыдущих фиг. №№12-17).
Деталь №2, показанная на фиг. №18, - внутреннее кольцо подшипника, вставленное в уже упоминавшееся малое кольцо механизма подвеса, описанного в патенте на изобретение №2134193 RU (смотрите фиг. №8, где воспроизведено соответствующее изображение из описания патента №2134193 RU). Если теперь к изображению на фиг. №8 добавить устройство, изображенное на фиг. №18, то получится следующее аксонометрическое изображение: см. фиг. №19.
Где мы видим, что на человека-оператора надеты в составе управляющего экзоскелета жесткие трусы №1, задающие угловую ориентацию его таза относительно грудного отдела (относительно жилета), а так же видим кольцо №2, выполненное с возможностью принудительного вращения вокруг оси вышележащего кольца, т.е. с возможностью поворачивать нижнюю часть тела (таз) вокруг вертикальной оси тела человека-оператора на угол G - его изменения определяются анатомией человека и ограничены диапазоном ±45°. Манипулятор O'A'B'F' на фиг. №19 не показан, т.к. в данном ракурсе он закрыт от нас телом человека-оператора. Жесткие трусы, надеваемые на человека-оператора, также как и головной жесткий шлем состоят из двух вложенных друг в друга жестких колоколообразных элементов, с отверстиями для продевания ног. Наружный жесткий (силовой) колоколообразный элемент жестких трусов со стороны спины крепится к манипулятору O'A'B'F' в районе копчика человека-оператора, а внутренний жесткий колоколообразный элемент жестких трусов предназначен для определения силовых воздействий, оказываемых телом (тазом) человека-оператора на внутреннюю поверхность жестких трусов. Так же следует заметить, что наружный жесткий колоколообразный элемент жестких трусов - основа для брюк управляющего экзоскелета - именно к нему со стороны спины крепятся силовые механизмы, ответственные за движения нижних конечностей (бедер) экзоскелета, надеваемого на человека-оператора. Между двумя жесткими слоями жестких трусов находится упругий наполнитель и датчики, определяющие силовые воздействия, оказываемые телом человека-оператора на внутреннюю поверхность жестких трусов. Также как и в головном жестком шлеме для фиксации тазовой области человека-оператора в жестких трусах используется раздувающийся пневматический герметичный объем, а для терморегуляции ближе к телу - пористый волокнистый слой с возможностью продувки воздуха. До сих пор все было аналогично устройству жесткого шлема, поэтому я ограничусь словесным описанием, и не буду приводить математических формул, т.к. они были рассмотрены выше. Манипулятор с помощью изменений углов О',Α',Β' задает наклоны жестких трусов экзоскелета вперед-назад, а изменение угла F' задает покачивание жестких трусов из стороны в сторону относительно грудного отдела, как это изображено на фиг. №7.
Однако в жестких трусах устройства нейроинтерфейса, конечно, нет, зато возможно наличие на теле человека-оператора памперса. (Вполне вероятно, что дистанционно-управляемые антропоморфные роботы будут использоваться в чрезвычайных ситуациях - при ликвидации каких-нибудь техногенных катастроф наподобие аварии на Фукусиме или в Чернобыле. В условиях ЧС человеку-оператору, вероятно, будет некогда часто снимать костюм управления, чтобы сходить в туалет для отправления естественных надобностей. Поэтому и рекомендуется использование памперса - это издержки профессий: космонавта, водолаза, спасателя, пожарного, летчика военного истребителя…)
Казалось бы, если в конструкции подвеса жесткого шлема и подвеса таза есть близкие аналогии, то можно тогда уже использовать полный аналог, например, поворачивать голову налево - направо вокруг вертикальной оси тела с помощью такого механизма, как изображено на фиг. №20. Однако для головы это будет невыгодно с энергетической точки зрения - придется принудительно поворачивать не только жесткий шлем, но еще и манипулятор. Также при повороте головы во многих случаях придется изменять ее наклон, т.е. при любом повороте головы придется пересчитывать и задавать новые углы О, А, В, F в подвижных сочленениях манипулятора. Кроме того, манипулятор потребует зарезервировать для своих перемещений угловой сектор в 90°, конечно, этот сектор будет располагаться за спиной у человека-оператора, но руки человека-оператора, пусть и с небольшой вероятностью, могут неудачно оказаться в этом секторе. Таким образом, для головы целесообразно вначале задавать наклоны относительно груди, а уже потом поворачивать голову налево-направо вокруг оси G, расположенной на макушке жесткого шлема как это было показано на фиг. №17 (или использовать встроенный в жесткий шлем на уровне основания черепа человека-оператора секторный подшипник для поворотов вокруг оси G).
Для нижних же конечностей управляющего экзоскелета метод поворота вокруг вертикальной оси G грудного отдела, подобный изображенному на фиг. №17, неприемлем - анатомия людей такова, что ноги человека не позволят установить между ними (на дне жестких трусов) ось вращения - там просто нет для этого места. Поэтому для нижнего отдела экзоскелета есть только единственная возможность: вначале осуществить поворот всего нижнего отдела экзоскелета, а затем манипулятором задать наклон жестких трусов экзоскелета, так, как это изображено на фиг. №18 и 19. (Вообще кинематические схемы устройства шеи и поясничного отдела антропоморфного робота, изображенные на фиг. №3 и №6 совпадают с кинематическими схемами, изображенными на фиг. №18 и 19. - Для голов робота и человека мы вначале задаем относительно грудного отдела наклон, а затем поворот. Для тазовых отделов робота и человека вначале задается поворот относительного грудного отдела, а затем уже наклон. Это совпадение отнюдь не случайно - я специально добивался его, т.к. только так можно добиться соответствия движений человека-оператора и дистанционно управляемого робота.)
При такой организации поворотов головы или нижнего отдела конечностей (таза) экзоскелета позвонки хребта человека-оператора будут испытывать небольшие обычные повороты друг относительно друга, как это происходит в естественных условиях. Потому что повороты передаются через систему промежуточных элементов на конечный элемент - на голову или на таз, в процессе чего длинные участки и хребта (шея или поясной отдел) равномерно скручиваются - каждый позвонок поворачивается лишь на небольшой угол относительно другого позвонка.
Рассмотрим возможное устройство датчиков измерения силовых воздействий для головного жесткого шлема и для жестких трусов. Здесь возможны датчики разных типов, работающих на разных физических принципах - особого значения это не имеет. В качестве примера я рассмотрю в головном жестком шлеме использование конденсаторных датчиков, см. фиг. №21, где показано сечения интересующих нас элементов жесткого шлема на уровне выше глаз человека-оператора.
Где цифрой №1 обозначено сечение внешнего колоколообразного силового элемента жесткого шлема пусть он будет изготовлен из диэлектрика (пластик).
Сечение внутреннего жесткого колоколообразного элемента жесткого шлема обозначено №2 - изготовлен из металла. Внутренний объем межу этими жесткими колоколообразными элементами жесткого шлема №1 и №2 заполнен упругим материалом на фиг. №21 он, как и на фиг. №11, условно обозначен «пружинками» №4. Датчики (на фиг. №11 они обозначались №5) представлены обкладками конденсаторов - по одной обкладке на каждый датчик. Вторая обкладка каждого такого датчика-конденсатора - это внутренний жесткий металлический колоколообразный элемент головного жесткого шлема. Под воздействием силовых усилий головы человека-оператора внутренний металлический элемент смещается относительно конденсаторных обкладок-датчиков №5. При этом изменяется емкость конденсаторов-датчиков. Можно привести электронную схему (она есть в описании патента на изобретении №2134193 RU), которая позволит по изменению емкостей конденсаторов определять направление смещения внутреннего жесткого металлического колоколообразного элемента и тем самым определять направление и величину силовых воздействий оказываемых человеком-оператором на внутреннюю поверхность жесткого шлема.
В жестком шлеме используются 8 таких датчиков - это дает возможность определять необходимость изменения угла в основании шеи и/или в основании черепа, смотрите фиг. №22 и №23.
На фиг. №22 внутренние силы, созданные головой человека-оператора (показаны стрелками), направлены в одну сторону (назад) - это дает управляющей электронике основание повернуть жесткий шлем вокруг основания шеи в направлении действия сил (изменить с помощью манипулятора угол D, см. фиг. №13).
На фиг. №23 внутренние силы, оказываемые головой человека (показаны стрелками), действуют на разные датчики в противоположном направлении - это дает управляющей электронике основание повернуть жесткий шлем вокруг основания черепа (изменить с помощью манипулятора угол С, см. фиг. №13).
Очевидно, что есть возможность спроектировать работу управляющих электронных логических схем таким образом, что они на основе показаний датчиков №5 позволят одновременно осуществлять повороты головы вокруг осей D и С, а не по отдельности. Тем самым мы обеспечиваем естественный стиль движения головы, но здесь этот вопрос я здесь уже не обсуждаю.
Следует учитывать, что в жестком шлеме также приходится учитывать взаимные небольшие повороты колоколообразных жестких элементов вокруг вертикальной оси жесткого шлема (это необходимо что бы иметь возможность поворачивать голову налево-направо вокруг вертикальной оси). Для этого используется датчик №6, см. фиг. №№11, 22, 23. Проблема в том, что жесткие колоколообразные элементы жесткого шлема не только могут вращаться друг относительно друга вокруг вертикальной оси головы на небольшой угол, но они еще могут и немного смещаться перпендикулярно к оси вращения. Поэтому просто использовать цифровой датчик угла поворота здесь не получится - предварительно придется позаботиться о том, чтобы перпендикулярные смещения не влияли на его работу. Данный вопрос сводится к задаче передачи вращения с одного вала на другой несоосный вал. Для данной проблемы в инженерной практике уже давно найдены решения с помощью, например, углового шарнира или крестовой муфты. Но в нашем случае можно предложить еще два варианта решения данного вопроса. Это можно сделать следующим образом, см. фиг. №№24 и 25. На фиг. №24 представлено изображение, которое мы увидим, если заглянем в жесткий шлем, когда из него удалены все внутренние элементы, включая внутренний жесткий колоколообразный элемент №2. На внутренней поверхности колоколообразного элемента жесткого шлема №1 в его вершине делают направляющую колею (условно говоря «рельсы») на фиг. №24 эта колея отмечена направлением Q-Q1, вдоль колеи может двигаться на подрессоренных роликах подвижный элемент T1 («тележка»). На подвижном элементе Т1 также имеются направляющие («рельсы»), установленные в направлении Z-Z1, перпендикулярном направлению Q-Q1. Второй подвижный элемент Т2, может смещаться на подрессоренных роликах по поверхности тележки T1 (по «рельсам») в направлении Z-Z1, перпендикулярном направлению Q-Q1. И уже к «тележке» Т2 и к вершине внутреннего колоколообразного жесткого элемента №2 крепится цифровой датчик угла поворота №6. Такая схема позволяет исключить влияние небольших взаимных смещений жестких колоколообразных элементов жесткого шлема №1 и №2 на работу датчика угла поворота.
Нижнее, на фиг. №25, приводится аксонометрическое изображение тележек вместе с дугообразными направляющими-рельсами (это изображение, конечно, условно - оно только демонстрирует принцип работы).
Теперь рассмотрим организацию работы датчиков для жестких трусов экзоскелета. Датчики линейных относительных смещений жестких колоколообразных элементов жестких трусов рассматривать нет смысла - они могут быть аналогичны тем, что мы рассмотрели выше для головного жесткого шлема (смотрите выше фиг. №№21-23 и пояснения к ним). Проблема возникает в размещении и устройстве датчиков, определяющих угол взаимного поворота жестких колоколообразных вложенных элементов, образующих жесткие трусы экзоскелета. Если в головном жестком шлеме мы могли вставить датчик угла поворота в макушку жесткого шлема, то в жестких трусах (на дне жестких трусов) экзоскелета для этого нет места - мешают ноги человека-оператора. Поэтому придется решать проблему определения угла взаимного поворота жестких колоколообразных элементов жестких трусов экзоскелета иным образом - см. фиг. №26.
Две окружности №1 и №2, имеющие один центр, - сечения вложенных жестких колоколообразных элементов жестких трусов экзоскелета. Цифрой №1 обозначен внешний силовой (присоединяемый к манипулятору) колоколообразный элемент жестких трусов экзоскелета, цифрой №2 - внутренний колоколообразный элемент жестких трусов, смещения и повороты которого относительно внешнего жесткого элемента №1 позволяют определить направление и величину силовых воздействий оказываемых человеком-оператором на внутреннюю поверхность жестких трусов.
Шестеренки №3 и №3', насаженные на оси датчиков угловых поворотов, с двух сторон прижимают к жесткому колоколообразному элементу №2 посредством пружинных распорок №4.
Особенностью пружинных распорок №4 является то, что датчики угловых поворотов и шестеренки №3 и №3' могут смещаться только вдоль осей «пружин» №4 (на фиг. №26 в горизонтальном направлении), и не могут двигаться в перпендикулярных направлениях (на фиг. №26 не могут смещаться в вертикальном направлении). (Подобный эффект достигается за счет применения петель - мы можем, например, в своей квартире открывать или закрывать входную дверь, подвешенную на петли - осуществлять поворот двери вокруг вертикальной оси. Дверь может быть даже подпружиненной - самостоятельно закрываться после того, как ее открыли. Но мы не можем также легко смещать дверь в перпендикулярных направлениях - вверх или вниз, если, конечно, дверные петли сделаны правильно, с фиксаций.)
Таким образом, определенные небольшие повороты или смещения внутреннего жесткого колоколообразного элемента №2 относительно колоколообразного элемента №1 вызывают вращения шестеренок №3 и №3', насаженных на оси датчиков угловых поворотов, как это показано на фиг. №27 и 28.
Смещение детали жестких трусов №2 в направлении перпендикулярном линии, проведенной между датчиками угловых поворотов, вызывает поворот шестеренок датчиков №3 и №3' в противоположные стороны. Поворот детали жестких трусов №2 вызывает поворот шестеренок датчиков №3 и №3' в одном направлении.
С помощью математических формул можно вычислить величину смещения и поворота колоколообразного элемента №2 относительно колоколообразного элемента №1. Пусть α1 - угол поворота первой шестеренки №3, α2 - угол поворота второй шестеренки №3'.
Тогда линейные смещения вычисляется по формуле:
Повороты:
Где Υ и Ω - коэффициенты, зависящие от радиусов окружностей №2 и №3, характеристик упругого заполнителя между жесткими колоколообразными элементами конструкции жестких трусов (жесткого шлема).
Эти формулы позволяют отслеживать линейные смещения и повороты внутреннего жесткого колоколообразного элемента жестких трусов экзоскелета.
Возможно, также вместо механических датчиков с шестеренками использовать оптические датчики, аналогичные тем, которые отвечают за работу оптической компьютерной мыши - прижать их «дверно» (как было рассмотрено выше) к поверхности внутреннего жесткого колоколообразного элемента жестких трусов экзоскелета - математика (формулы 17 и 18) при этом останется той же. Также можно аналогичным образом использовать оптические датчики и для определения поворотов внутреннего жесткого колоколообразного элемента головного жесткого шлема относительно внешнего жесткого элемента (в этом случае отпадает необходимость использовать «рельсы» и тележки, изображенные на фиг. №№24 и 25).
Таким образом, мы рассмотрели принципиальные решения по созданию всех важных элементов, необходимых для организации поддержки головного жесткого шлема и нижних конечностей (таза) экзоскелета, применяемого для управления дистанционным антропоморфным роботом.
Однако есть возможность отказаться от изготовления подшипника качения большого диаметра, который был изображен на фиг. №18 и №19. Но для этого придется модифицировать конструкцию внутреннего кольца механизма подвеса тела человека-оператора, описанного в патенте на изобретение №2134193 RU.
Следует особо подчеркнуть, что вся математика, изложенная в патенте №2134193 RU, описывающая работу глобального механизма подвеса всего тела человека-оператора, правильна и поэтому останется прежней. Изменения касаются только внутреннего кольца механизма подвеса, кольца, которое в механизме подвеса ближе всего расположенного к телу человека-оператора еще раз сошлюсь на фиг. №8, взятую из описания патента на изобретение №2134193 RU.
Новая кинематическая схема внутреннего кольца механизма подвеса тела человека-оператора, позволяющая осуществить локальный силовой привод жесткого шлема виртуальной реальности, надеваемого на голову человека, и локальный силовой привод элементов экзоскелета, ответственных за нижнюю часть тела (брюки), представлена на фиг. №29.
Плоскость внутреннего жесткого кольца №1 механизма подвеса теперь должна быть параллельна вертикальной оси человека-оператора, окружая его сверху снизу и по бокам. Оси-выступы №2 и №3, относительно которых происходит вращение этого внутреннего жесткого кольца механизма подвеса (и соответственно общие наклоны вперед-назад всего тела человека-оператора), расположены по-прежнему, как и в патенте №2134193 RU, слева и справа от тела человека-оператора.
За спиной у человека-оператора перпендикулярно плоскости внутреннего кольца механизма подвеса (перпендикулярно телу человека) располагается жесткая «заспинная» дуга №4, берущая начало на осях-выступах внутреннего кольца механизма подвеса, см. фиг. №30, где показан аксонометрический вид внутреннего кольца механизма подвеса вид сзади.
Эта жесткая дуга может иметь переменный радиус кривизны (быть эллиптической - по краям, возле осей-выступов иметь большой радиус (апогей), а в средине (в перигее) дуга может иметь меньший радиус - проходить ближе к спине человека-оператора. Либо, как это показано на фиг. №30, заспинная дуга №4 может менять свой радиус резко (ступенчато) - вначале большой радиус, потом к средине дуги радиус ступенчато уменьшается, затем опять резко возвращается к начальной большой величине.
Из средины заспинной дуги №4 по направлению к центру всей системы идет стержень №5, который упирается в ранец грудного отдела экзоскелета управления. Принудительные повороты в пространстве всей этой жесткой конструкции «оси-выступы - внутреннее кольцо механизма подвеса - заспинная дута - стержень - ранец» позволяют задавать принудительную пространственную ориентацию в пространстве грудного отдела экзоскелета - общую пространственную угловую ориентацию тела человека-оператора см. фиг. №31 (вид сверху) и №32 (аксонометрическая проекция).
На фиг. №32 показаны: внутренне кольцо механизма подвеса №1, заспинная дуга №4, стержень №5 и человек-оператор. Также на фиг. №32 показан манипулятор О-А-В, задающий наклоны вперед-назад жесткого шлема (головы человека-оператора).
Однако чтобы не усложнять изображение, на фиг. №32 (и на последующих фигурах) не показаны элемент, задающий параметр F -наклоны головы человека-оператора налево - направо к левому и правому плечам, а также элемент G, поворачивающий голову вокруг вертикальной оси головы на угол G, смотри фиг. №17 - предполагается, что эти элементы есть по умолчанию, просто на фиг. №32 и последующих они не показаны.
Поворот нижних конечностей человека-оператора (брюк экзоскелета) вокруг вертикальной оси тела осуществляется жесткой дугой (назовем ее «вертикальная дуга»), выполненной с возможностью принудительного вращения на ограниченные углы вокруг осей-выступов G-G', имеющихся на конце дуги, см. фиг. №33. Эти оси-выступы вертикальной дуги вставляются в отверстия G-G', имеющиеся на внутреннем кольце механизма подвеса сверху над головой и снизу под ногами у человека оператора, см. фиг. №32. Принудительные повороты вертикальной дуги вокруг осей-выступов G-G' на ограниченные по амплитуде углы вокруг вертикальной оси тела человека-оператора позволяют осуществлять повороты нижней части туловища человека относительно его грудного отдела. Также на дуге имеется стержень, на котором крепится нижний манипулятор O'-A'-B'-F', ответственный за наклоны жестких трусов экзоскелета вперед - назад, налево - направо, см. фиг. №34 (вид сбоку) и №35 (аксонометрический вид).
Таким образом, здесь был рассмотрен вариант механизма подвеса, в котором угловые ориентации головы и таза человека-оператора относительно грудного отдела задаются с помощью манипуляторов, а благодаря вертикальной дуге удается избежать использования подшипника большого диаметра.
Вероятно, именно такой тип подвеса головы и таза тела человека-оператора найдет наиболее широкое применение в силу простоты устройства.
Однако, манипуляторы, рассмотренные выше, имеют серьезный недостаток - существует опасность их неправильного срабатывания, смотрите фиг. №36. Где показан возможный сбой в режиме работы манипулятора, ответственного за придания необходимой пространственной ориентации жесткого шлема - отрыв головы человека-оператора.
Конечно, для предотвращения столь фатальных последствий можно принять ряд мер, например, ограничить силовые характеристики манипулятора до такой степени, что он не сможет нанести серьезную травму. Однако ограничение мощности может негативно сказаться на динамических характеристиках системы управления роботом. Можно применить многократное дублирование в расчетах углов и в управляющих сигналах и т.д. Но в любом случае, пусть и с малой вероятностью, нанесение вреда остается, т.к. в такой конструкции манипуляторов сложно предусмотреть чисто механическое ограничение амплитуд углов поворотов суставов манипулятора.
Поэтому рассмотрим другие технические возможности придания необходимой угловой ориентации относительно грудного отдела для жесткого шлема и нижних конечностей (брюк) экзоскелета, применяемого для управления дистанционным антропоморфным роботом. Для начала я должен указать, что механизм подвеса, описанный мной в патенте №2134193 RU, по сути дела является модифицированным кардановым подвесом (этот подвес, безусловно, сложней классического карданового подвеса, описанного в 1550 году итальянским инженером Д. Кардано, но это, тем не менее, карданов подвес, т.к. в нем во множественном числе используются кольца-рамки с осями-выступами расположенными перпендикулярно). Нас сейчас интересует только внутренняя рамка-кольцо механизма подвеса, описанного в патенте №2134193 RU - она задает глобальную ориентацию всего тела человека-оператора. Именно относительно этой рамки-кольца и жестко закрепленного в ней грудного отдела человека-оператора и будет необходимо наклонять и поворачивать голову и таз (нижние конечности человека). Мы поступим следующим образом: разместим внутри малого кольца механизма подвеса меньшие по размеру локальные кардановы подвесы, ответственные за движения головы и таза человека-оператора относительно грудного отдела.
Фиг. №37 - общий вид спереди такого внутреннего кольца механизма подвеса.
Вертикальная дуга №6 в этот раз проходит перед человеком-оператором.
На фиг. №38 и 39 представлены аксонометрические проекции кольца механизма подвеса и человека-оператора, помещенного внутрь него, (другие элементы конструкции пока не рассматриваются). В местах, где у кольца №1 механизма подвеса имеются оси-выступы №2 и №3, берет начало дуга №4, заходящая за спину человека-оператора, из которой в направлении к центру механизма подвеса берут начало два радиальных стержня №5 и №5', упирающиеся в наспинный ранец человека-оператора. (Стержни №5 и №5' сходятся на спине человека-оператора под углом примерно в 100°. Использование двух поддерживающих стержней и величина угла между ними обусловлены тем, что при использовании локальных кардановых подвесов некоторые детали этих подвесов в процессе сгибаний и поворотов спины или наклонов головы назад могли пересекаться с одиночным перпендикулярным спине стержнем. Чтобы этого не произошло, используется два стержня, угол межу которыми примерно 100°,- напомню, что поворот таза человека относительно грудного отдела находится в пределах ±45° так, что при 100° получается небольшой запас по углу. Возможно также использовать не прямые стержни, а какие-то более сложные по геометрии элементы, но этот вопрос здесь я обсуждать не буду.) Все эти элементы: внутреннее кольцо механизма подвеса, дуга, жесткие стержни и грудной отдел экзоскелета представляют собой единую жесткую систему, таким образом, что принудительное изменение ориентации в пространстве внутреннего кольца механизма подвеса №1 неизбежно вызывает такие же изменения ориентации в пространстве и грудного отдела экзоскелета, т.е. изменение пространственной ориентации тела человека-оператора в целом. Также на внутренней поверхности кольца №1 имеются жесткие элементы D и D' с соответствующими отверстиями D и D', расположенными на уровне основания шеи человека-оператора.
Жесткая дуга, см. фиг. №40, с осями-выступами D-D' и отверстиями С-С, выполненная с возможностью принудительного вращения на угол D вокруг оси D-D', применяется для наклонов головы человека-оператора на угол D в основании шеи. Она вставляется своими осями выступами D, D' в одноименные отверстия D и D' соответствующих элементов внутреннего кольца механизма подвеса. Расстояние от осей-выступов D-D' и отверстий С-С равно длине шеи человека-оператора - от основания шеи до основания черепа. Это расстояние D-C на дуге может регулироваться, индивидуально для каждого человека-оператора (в данной работе вопросы регулирования расстояний и углов поворотов деталей не рассматриваются, но предполагается, что такая возможность существует).
Следующий жесткий элемент конструкции «скрещенные дуги», см. фиг. №41, образован дугой с осями-выступами С-С и перпендикулярной к ней дугой, оканчивающейся осью F. Геометрические оси С-С и F пересекаются в основания черепа человека-оператора. Для демонстрации этого приводится фиг. №42, где изображен жесткий шлем, надеваемый на голову человека-оператора, совместно со скрещенными дугами. Принудительный поворот скрещенных дуг вокруг осей выступов С-С на угол С будет задавать наклон вперед - назад головы человека-оператора в основании черепа на угол С, а принудительные повороты жесткого шлема вокруг оси F на угол F будут наклонять жесткий шлем (голову человека-оператора) к левому или правому плечу – см. фиг. №42, №2, №3 и №4.
На фиг. №43 представлен аксонометрический вид сзади на жесткий шлем, скрещенные дуги С-С- F и дугу D-D'.
После того, как жесткий шлем (голова человека-оператора) будет должным образом наклонен относительно грудного отдела посредством рассмотренных здесь механизмов на углы D, С и F несложно повернуть жесткий шлем (и голову человека-оператора) на угол G, см. фиг. №5. Однако поворот головы на угол G легко осуществляется, см. фиг. №17, поэтому, как было указано выше, чтобы не загромождать изображения, здесь на фигурах не показаны конструктивные элементы, ответственные за повороты головы человека-оператора налево - направо вокруг вертикальной оси головы.
Рассмотрим задание угловой ориентации нижнего отдела тела человека-оператора относительно грудного отдела.
Прежде всего, задается поворот нижней части тела путем принудительного поворота вертикальной дуги G-G', на ограниченный угол G вокруг оси G-G', при этом вертикальная дуга №6 теперь, в отличие от простого механизма подвеса с манипуляторами, см. фиг. №№29, 34, 35, находится перед лицом человека-оператора, см. фиг. №44. Такое переднее расположение вертикальной дуги выбрано, чтобы освободить место за спиной человека-оператора для работы других механизмов.
На фиг. №44 видно, что с вертикальной дугой жестко скреплена дуга меньшего радиуса кривизны D-G'-D'. Изображения вертикальной дуги в разных ракурсах представлены на фиг.: №45 (вид спереди), 46 (вид сбоку), 47 (аксонометрическая проекция), 48 и 49 (аксонометрические проекции взаимного расположения вертикальной дуги и тела человека-оператора с разных ракурсов).
На фиг. №50 показано аксонометрическое изображение взаимного расположения внутреннего кольца механизма подвеса №1, человека-оператора и вертикальной дуги - вертикальная дуга №6 своими осями-выступами G' и G вставлена в отверстия G' и G внутреннего кольца механизма подвеса.
Далее в устройстве используют жесткую дугу D'-C'-C-D, см. фиг. №51. Ее вставляют осями-выступами D' и D в отверстия D' и D на вертикальной дуге №6, см. фиг. №52. Принудительные повороты дуги D'-C'-C-D вокруг осей-выступов D'-D на угол D относительно вертикальной дуги №6 задают наклон вперед-назад нижней части тела человека-оператора в районе пояса, чуть ниже грудного отдела.
Отверстия С и С в дуге D'-C'-C-D подбирают индивидуально для каждого человека-оператора, таким образом, что расстояние D-C равно расстоянию между поясным отделом и тазом человека-оператора.
Затем в устройстве используют деталь, состоящую из двух дуг, жестко скрепленных таким образом, что они создают в пространстве пересечение геометрических осей С'-С и F', см. фиг. №53 (вид спереди), №54 (вид сбоку), №55 (аксонометрическое изображение). Принудительный поворот этой детали на угол С вокруг осей-выступов С'-С относительно дуги D'-C-C-D в отверстиях С'-С задает наклон вперед-назад жестких трусов (таза человека-оператора) на угол С.
Принудительный поворот жестких трусов экзоскелета на угол F вокруг стержня-оси F', см. фиг. №56, задает наклоны жестких трусов (тазовой области человека-оператора) налево - направо, см. фиг. №7, на угол F относительно грудного отдела.
Разные ракурсы такого внутреннего кольца механизма подвеса с кардной передачей представлены на фиг. №57 (вид сбоку), №58 (аксонометрический вид спереди) и №59 (аксонометрический вид сзади).
Описанное только что внутренне кольцо механизма подвеса с встроенными в него кардановыми подвесами передачи усилий на жесткий шлем и нижние конечности экзоскелета позволяет ограничить амплитуды углов деталей посредством механических ограничителей (вкрученных болтов), настраивая работу устройства индивидуально для каждого человека-оператора (в процессе надевания аппаратуры), что делает такой механизм подвеса более безопасным по сравнению с механизмом подвеса, в котором используются манипуляторы, см. фиг. №36 и №35.
Таким образом, мы рассмотрели все детали внутреннего кольца механизма подвеса, позволяющие задавать пространственную ориентацию головы и нижних конечностей человека-оператора относительно грудного отдела, в соответствии с кинематическими схемами антропоморфного робота, рассмотренными на фиг. №3 и №6.
Возникает вопрос: возможно ли с помощью передачи усилий через карданов подвес на жесткий шлем и таз создать большее количество степеней подвижности, как это было при обсуждении фиг. №16 (показано пунктирными линиями)? Да, возможно, - автор данной заявки на изобретение провел исследование этого вопроса. Но конструкция внутреннего кольца с кардановыми подвесами передачи усилий на голову и таз в этом случае приобретает очень сложную структуру - получается своеобразная «тюремная решетка», затрудняющая доступ человеку-оператору на его рабочее место, особенно если учитывать, что вокруг будут еще пять колец, окружающих внутренне кольцо механизма подвеса. Производители оборудования едва ли согласятся на изготовление подобного устройства. Тем более что это имеет смысл только в том случае, если и конструкция дистанционно управляемого робота будет усложнена, добавлением двух суставов. Однако в чисто иллюстративных целях я привожу здесь несколько фигур такого усложненного (с большим числом степеней свободы) внутреннего кольца механизма подвеса с кардановой передачей усилий на голову и нижние конечности, но без подробного описания работы устройства, см. фиг. №60 (вид спереди), 61 (вид сбоку), 62 (аксонометрия - вид спереди), 63 (аксонометрия - вид сзади). В таком усложненном кардановом механизме используются рамки с деформированной плоскостью - в них геометрические оси вращения пересекаются под прямым углом, но чтобы избежать столкновений со стержнями, подвешивающими грудной отдел человека-оператора, плоскости рамок пришлось разнести на разные уровни - деформировать, см. фиг. №64. Так же в усложненном кардановом механизме используются скрещенные дуги, применяемые для разделения осей вращения на разные высоты, см. фиг. №65.
Позе я выложу описание изобретения в Интернет, и все желающие смогут подробно ознакомиться с 3D чертежами всех рассмотренных здесь типов механизмов подвеса, выполненных в программе AutoCAD, - покрутить их в пространстве и посмотреть в разных проекциях.
В заключение остается добавить, что рассмотренный здесь способ размещения чувствительных элементов внутри управляющего экзоскелета, наряду с другими мерами обязателен для обеспечения качественного управления дистанционными копирующими роботами.
Перечень фигур к заявке на изобретение:
«Способ принудительной угловой ориентации головы и таза человека-оператора в механизме подвеса, применяемого для дистанционного управления антропоморфным роботом»
1. Скелет шейного отдела человека - демонстрация сложной кинематической схемы суставов шеи человека.
2. Наклоны человеком головы вперед - назад.
3. Кинематическая схема суставов шеи антропоморфного робота.
4. Наклоны головы человека к правому или левому плечу.
5. Повороты головы человеком вправо или влево вокруг вертикальной оси головы.
6. Кинематическая схема суставов поясного отдела антропоморфного робота.
7. Наклоны тела человека налево - направо в области пояса.
8. Изображение внутреннего кольца механизма подвеса из патента на изобретение №2134193 RU.
9. Дистанционно управляемый антропоморфный робот, выполняющий работу в горизонтальном положении, изображение из патента на изобретение №2134193 RU.
10. Человек-оператор, вынужденный держать голову на весу в процессе управления дистанционным роботом, находящемся в горизонтальном положении, изображение из патента на изобретение №2134193 RU.
11. Разрез жесткого шлема, надеваемого на голову человека-оператора, управляющего роботом, с демонстрацией внутренних слоев.
12. Упрощенная схема манипулятора, ответственного за придание наклонов вперед-назад головы человека-оператора.
13. Кинематическая схема манипулятора, с введением системы координат, буквенных обозначений и указанием направления отсчета углов.
14. Кинематическая схема манипулятора, необходимая для выведения математических формул вычисления углов А и О.
15. Кинематическая схема манипулятора, необходимая для выведения математических формул вычисления угла В.
16. Кинематическая схема манипулятора с добавлением оси F, ответственной за покачивание головой вправо - влево в направлении плеч.
17. Полная кинематическая схема манипулятора с добавлением оси G, ответственной за повороты головы вправо-влево вокруг вертикальной оси головы.
18. Вид слева и справа на жесткие трусы экзоскелета, подвешенные на манипуляторе, прикрепленном к кольцу большого подшипника, выполненного с возможностью вращения вокруг вертикальной оси грудного отдела тела человека-оператора.
19. Аксонометрическая проекция внутреннего кольца механизма подвеса тела человека-оператора с дополнительным большим кольцом подшипника, ответственного за повороты жестких трусов экзоскелета вокруг вертикальной оси грудного отдела.
20. Изображение, применяемое в процессе анализа возможности осуществления поворотов головы человека-оператора налево-направо относительно вертикальной оси теми же методами, какими осуществляются и повороты таза относительно грудного отдела.
21. Сечение жесткого шлема, выполненное перпендикулярно вертикальной оси жесткого шлема на уровне выше глаз человека-оператора, демонстрируемое для объяснения принципов работы датчиков, ответственных за измерение линейных усилий оказываемых головой человека-оператора на внутреннюю поверхность жесткого шлема.
22. Сечение головного жесткого шлема, демонстрирующее работу датчиков линейных силовых усилий головы человека-оператора, позволяющих электронике прийти к выводам о необходимости наклонить жесткий шлем в основании шеи человека-оператора.
23. Сечение головного жесткого шлема, демонстрирующее работу датчиков линейных силовых усилий головы человека-оператора, позволяющих электронике прийти к выводам о необходимости наклонить жесткий шлем в основании черепа человека-оператора.
24. Вид сверху на устройство, позволяющее исключить влияние небольших линейных смещений жестких элементов жесткого шлема на работу датчика, ответственного за измерения небольших относительных поворотов вложенных жестких элементов жесткого шлема.
25. Аксонометрический вид на устройство, позволяющее исключить влияние небольших линейных смещений жестких элементов жесткого шлема на работу датчика, ответственного за измерения небольших относительных поворотов вложенных жестких элементов жесткого шлема.
26. Фигура, демонстрирующая комплектацию и конфигурацию датчиков, позволяющих измерять взаимные повороты вложенных жестких элементов жестких трусов экзоскелета.
27. Фигура, демонстрирующая принцип работы датчиков, позволяющих определять линейные смещения вложенных жестких элементов жестких трусов экзоскелета.
28. Фигура, демонстрирующая принцип работы датчиков, позволяющих определять за счет направления вращения шестеренок взаимные вращения вложенных жестких элементов жестких трусов экзоскелета.
29. Вид спереди на модифицированное внутренне кольцо механизма подвеса тела человека-оператора, с манипуляторами, задающими угловую ориентацию жесткого шлема и таза экзоскелета относительно грудного отдела человека.
30. Аксонометрический вид на модифицированное внутренне кольцо механизма подвеса тела человека-оператора
31. Вид сверху на тело человека-оператора и модифицированное внутренне кольцо механизма подвеса тела человека-оператора.
32. Аксонометрический вид сбоку на внутреннее кольцо механизма подвеса, тело человека-оператора и манипулятор, ответственный за придание угловой пространственной ориентации головы относительно грудного отдела человека.
33. Вид сбоку на «Вертикальную дугу», применяемую для подвеса нижнего манипулятора, задающего наклоны таза, и для поворотов нижней части туловища (таза) человека-оператора вокруг вертикальной оси грудного отдела.
34. Вид сбоку на тело человека-оператора и внутренне кольцо механизма подвеса в полной комплектации: с и двумя манипуляторами, ответственными за пространственную угловую ориентацию жесткого шлема и таза человека-оператора относительно грудного отдела.
35. Аксонометрический вид на тело человека-оператора и внутренне кольцо механизма подвеса в полной комплектации: с и двумя манипуляторами, ответственными за пространственную угловую ориентацию жесткого шлема и таза человека-оператора относительно грудного отдела.
36. Демонстрация недостатков использования манипуляторов.
37. Вид спереди на внутренне кольцо механизма подвеса, в котором вместо манипуляторов для придания пространственной угловой ориентации головы и таза человека-оператора используются локальные кардановы подвесы.
38. Аксонометрический вид спереди на тело человека-оператора и внутреннее кольцо механизма подвеса, в котором вместо манипуляторов для придания пространственной угловой ориентации головы и таза используются локальные кардановы подвесы.
39. Аксонометрический вид сзади на тело человека-оператора и внутреннее кольцо механизма подвеса, в котором вместо манипуляторов для придания пространственной угловой ориентации головы и таза используются локальные кардановы подвесы.
40. Аксонометрический вид на жесткую дугу, посредством принудительного вращения которой вокруг осей-выступов жесткому шлему экзоскелета придается наклон вокруг основания шеи человека-оператора.
41. Аксонометрический вид на жесткие скрепленные дуги, со скрещенными осями, повороты жесткого шлема вокруг которых позволяют задавать ориентацию головы человека-оператора в области основания черепа.
42. Аксонометрическое изображение взаимного расположения жесткого шлема и скрепленных жестких дуг, задающих угловую пространственную ориентацию головы в основании черепа человека.
43. Аксонометрическое изображение (вид сзади) на торс и жесткий шлем человека-оператора и дуг, задающих наклоны головы человека-оператора в основании черепа и в основании шеи.
44. Отдельное изображение взаимного расположения тела человека-оператора и вертикальной дуги, задающей повороты таза относительно грудного отдела человека-оператора.
45. Вид спереди на вертикальную дугу с прикрепленной к ней дугой, меньшего радиуса кривизны с отверстиями, задающими пространственное положение оси вращения нижней части тела чуть ниже грудного отдела.
46. Вид слева на вертикальную дугу с прикрепленной к ней дугой, меньшего радиуса кривизны с отверстиями, задающими пространственное положение оси вращения нижней части тела чуть ниже грудного отдела.
47. Аксонометрическое изображение вертикальной дуги с прикрепленной к ней дугой, меньшего радиуса кривизны с отверстиями, задающими пространственное положение оси вращения нижней части тела чуть ниже грудного отдела.
48. Аксонометрическое изображение, вид спереди, показывающее взаимное расположение в механизме подвеса тела человека-оператора и вертикальной дуги с прикрепленной к ней дугой, меньшего радиуса кривизны с отверстиями, задающими ось вращения чуть ниже грудного отдела человека.
49. Аксонометрическое изображение, вид сзади, показывающее взаимное расположение в механизме подвеса тела человека-оператора и вертикальной дуги с прикрепленной к ней дугой, меньшего радиуса кривизны с отверстиями, задающими пространственное положение оси вращения нижней части тела чуть ниже грудного отдела.
50. Аксонометрическое изображение, показывающее взаимное пространственное расположение, внутреннего кольца механизма подвеса тела человека-оператора, вертикальной дуги и тела человека-оператора внутри них.
51. Аксонометрическое изображение жесткой дуги, принудительные повороты которой задают наклон нижней части тела человека оператора относительно грудного отдела в точке чуть ниже грудного отдела. Кроме того, параметры этой дуги определяют расстояние до второй оси наклонов жестких трусов экзоскелета.
52. Аксонометрическое изображение взаимного пространственного расположения вертикальной дуги, задающей поворот нижней части тела относительно вертикальной оси грудного отдела, и дуги, принудительные повороты которой задают наклон нижней части тела в точке чуть ниже грудного отдела.
53. Вид спереди на деталь, образованную жесткими скрещенными дугами, геометрические оси, проходящие через концы этих дуг, скрещиваются на тазе человека-оператора.
54. Вид слева на деталь, образованную жесткими скрещенными дугами, геометрические оси, проходящие через концы этих дуг, скрещиваются на тазе человека-оператора.
55. Аксонометрическая проекция детали, образованной жесткими скрещенными дугами, геометрические оси, проходящие через концы этих дуг, пересекаются под прямым углом на тазе человека-оператора.
56. Аксонометрическая проекция детали, образованной жесткими скрещенными дугами, и тела человека-оператора - геометрические оси, образованные концами этих дуг, проходят через жесткие трусы, надетые на человека-оператора.
57. Вид слева на внутренне кольцо механизма подвеса тела человека-оператора с локальными кардановыми подвесами жесткого шлема и жестких трусов экзоскелета.
58. Аксонометрический вид на внутренне кольцо механизма подвеса тела человека-оператора с локальными кардановыми подвесами жесткого шлема и жестких трусов экзоскелета.
59. Аксонометрический вид сзади на внутренне кольцо механизма подвеса тела человека-оператора с локальными кардановыми подвесами жесткого шлема и жестких трусов экзоскелета.
60. Вид спереди на внутренне кольцо механизма подвеса тела человека-оператора, с локальными кардановыми подвесами жесткого шлема и жестких трусов экзоскелета с большим количеством степеней свободы.
61. Вид слева на внутренне кольцо механизма подвеса тела человека-оператора, с локальными кардановыми подвесами жесткого шлема и жестких трусов экзоскелета с большим количеством степеней свободы.
62. Аксонометрический вид внутреннего кольца механизма подвеса тела человека-оператора, с локальными кардановыми подвесами жесткого шлема и жестких трусов экзоскелета с большим количеством степеней свободы.
63. Аксонометрический вид сзади внутреннего кольца механизма подвеса тела человека-оператора, с локальными кардановыми подвесами жесткого шлема и жестких трусов экзоскелета с большим количеством степеней свободы.
64. Аксонометрический вид подвешивающей рамки, применяемой в усложненном кардановом подвесе с большим количеством степеней свободы, ее плоскость деформирована для предотвращения столкновений со стержнями, подвешивающими грудной отдел человека-оператора.
65. Аксонометрический вид на жесткие скрещенные дуги, применяемые для разделения осей вращения на разные высоты, в усложненном кардановом подвесе с большим количеством степеней свободы.
| название | год | авторы | номер документа |
|---|---|---|---|
| Экзоскелет для дистанционного управления в копирующем режиме антропоморфным роботом | 2021 |
|
RU2832192C2 |
| СПОСОБ ДИСТАНЦИОННОГО УПРАВЛЕНИЯ АНТРОПОМОРФНЫМ ШАГАЮЩИМ КОПИРУЮЩИМ РОБОТОМ | 1997 |
|
RU2134193C1 |
| СПОСОБ УПРАВЛЕНИЯ РОБОТОМ С ПОМОЩЬЮ КОНТРОЛЛЕРОВ И ШЛЕМА ВИРТУАЛЬНОЙ РЕАЛЬНОСТИ | 2019 |
|
RU2718240C1 |
| СПОСОБ КОПИРУЮЩЕГО УПРАВЛЕНИЯ МАНИПУЛЯТОРАМИ АНТРОПОМОРФНОГО РОБОТА | 2019 |
|
RU2724769C1 |
| Тазобедренный шарнирный модуль экзоскелета | 2023 |
|
RU2818620C1 |
| АКТИВНЫЙ МОДУЛЬ СПИНЫ ЭКЗОСКЕЛЕТА | 2023 |
|
RU2825044C1 |
| ГРУЗОВОЙ ЭКЗОСКЕЛЕТ С НАСТРОЙКОЙ ПОД АНТРОПОМЕТРИЧЕСКИЕ ПАРАМЕТРЫ ПОЛЬЗОВАТЕЛЯ | 2017 |
|
RU2665116C1 |
| КОМПЛЕКС КОПИРУЮЩЕГО УПРАВЛЕНИЯ МАНИПУЛЯТОРАМИ АНТРОПОМОРФНОГО РОБОТА | 2019 |
|
RU2725930C1 |
| СИСТЕМА УПРАВЛЕНИЯ АНТРОПОМОРФНЫМ РОБОТОМ И СПОСОБ УПРАВЛЕНИЯ | 2007 |
|
RU2361726C2 |
| Способ распределенной защиты человека-оператора от ударных перегрузок | 2015 |
|
RU2620703C2 |
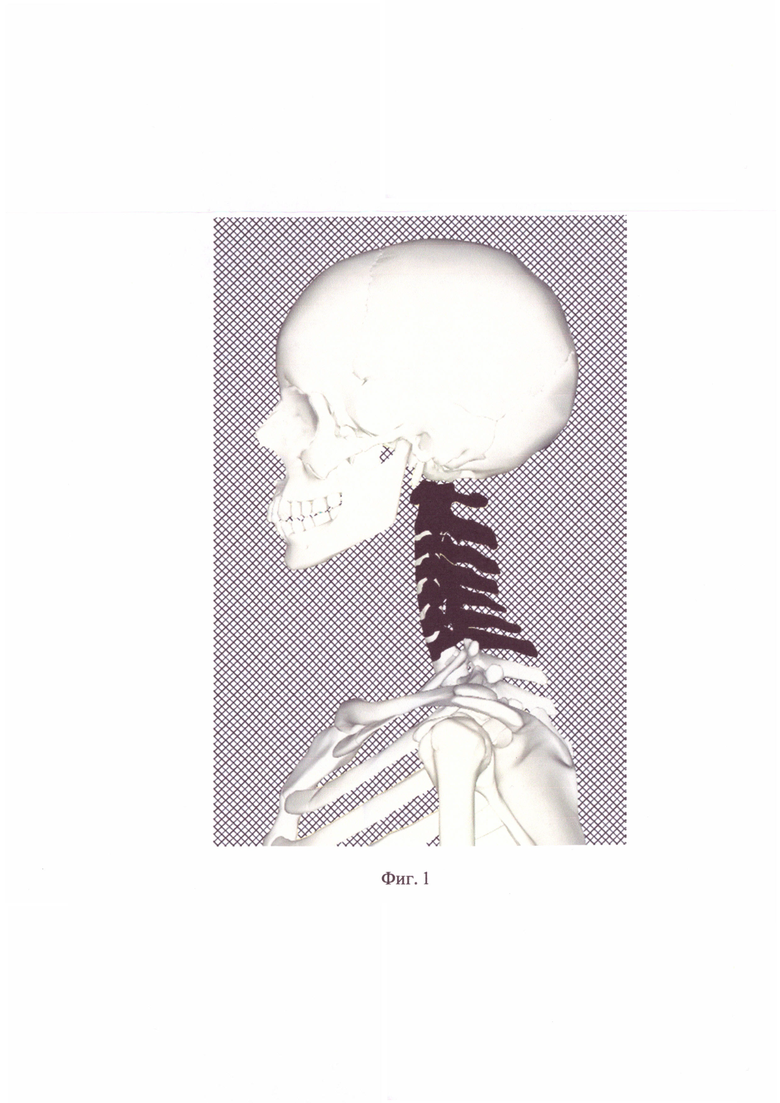
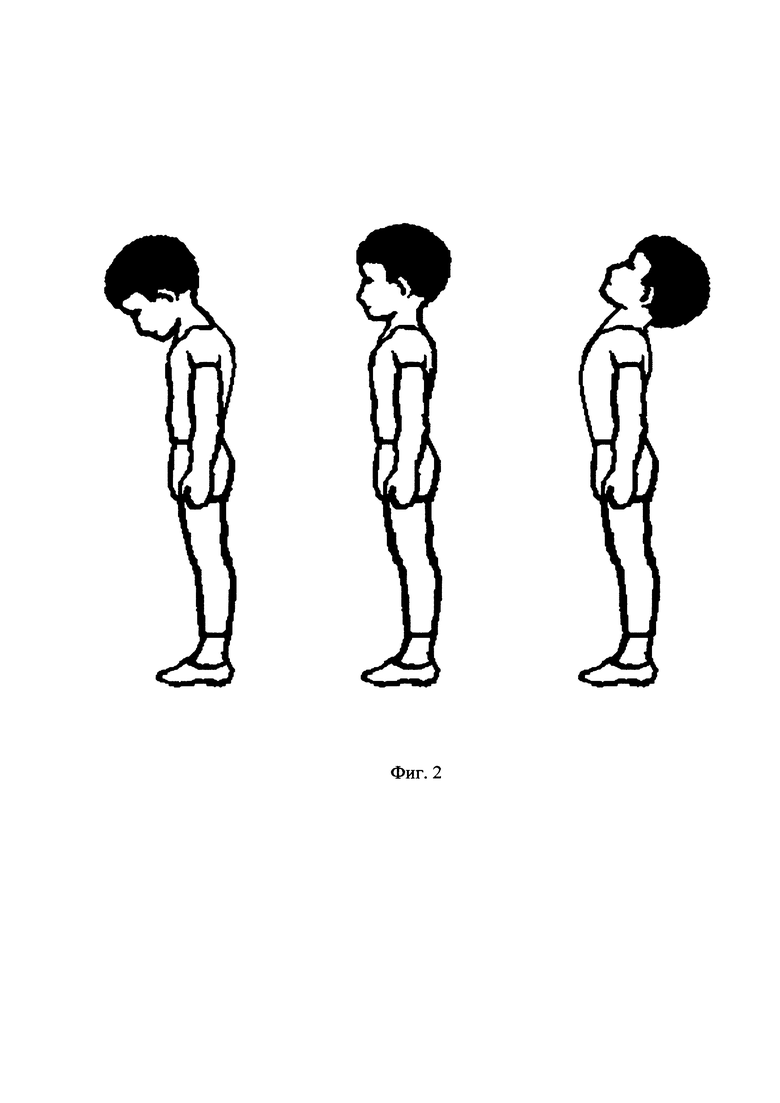
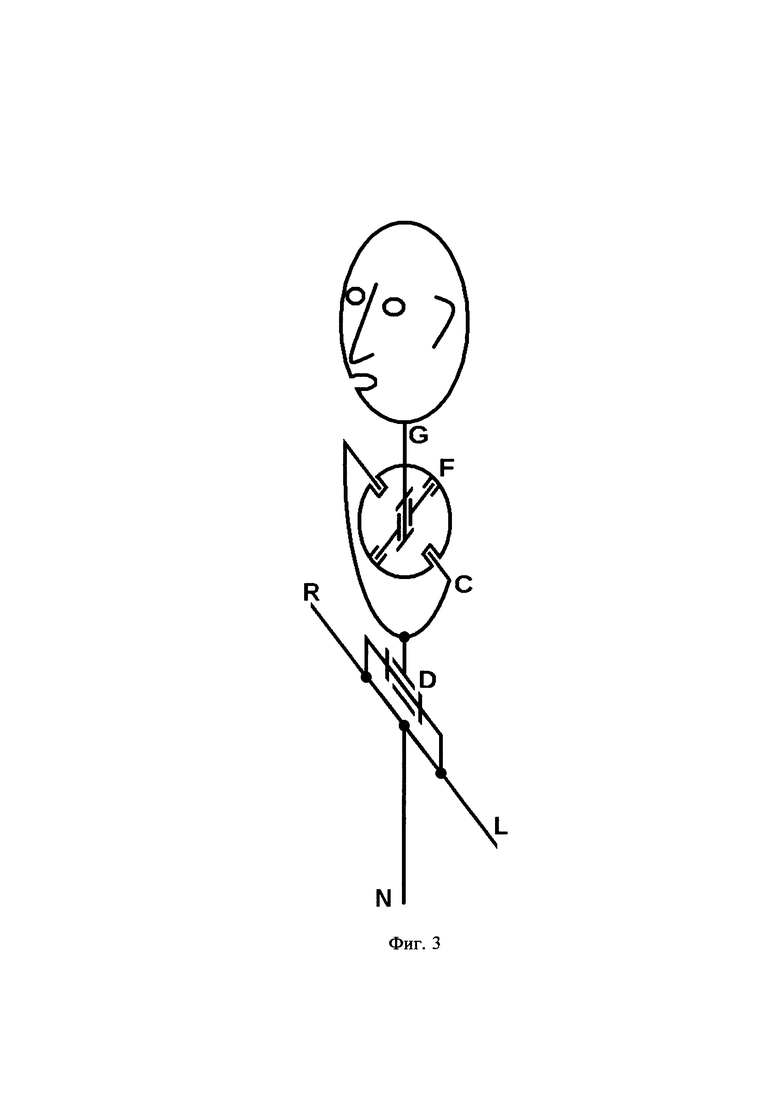
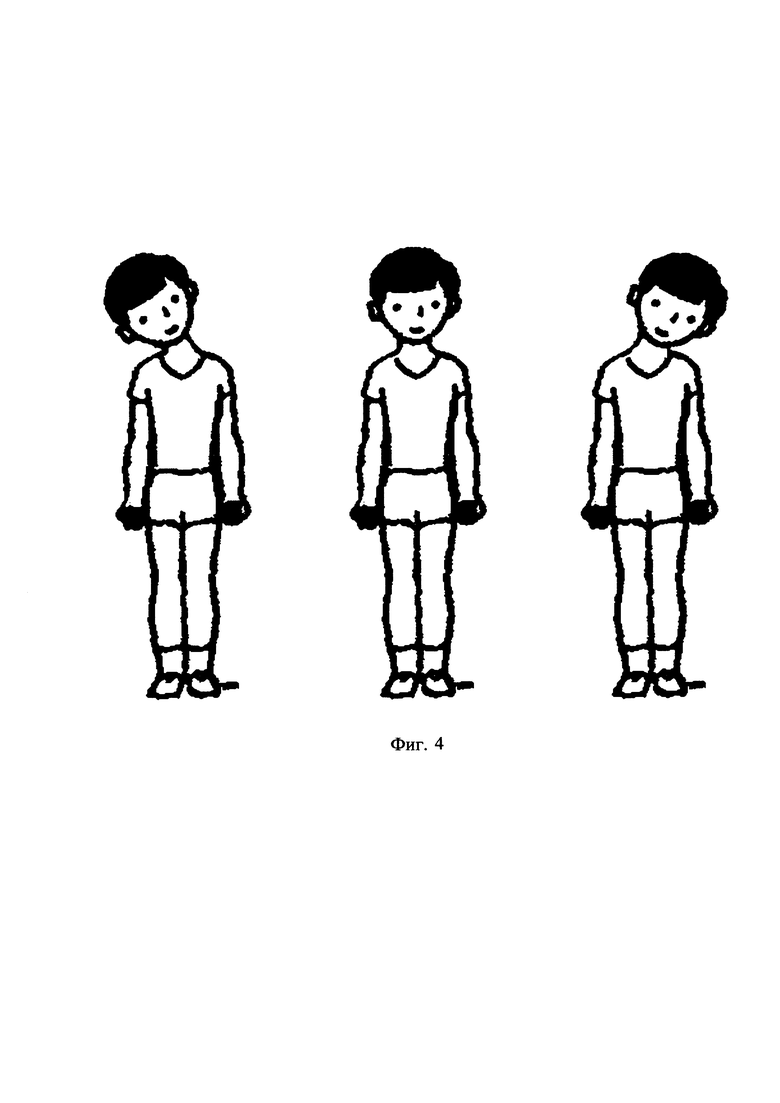
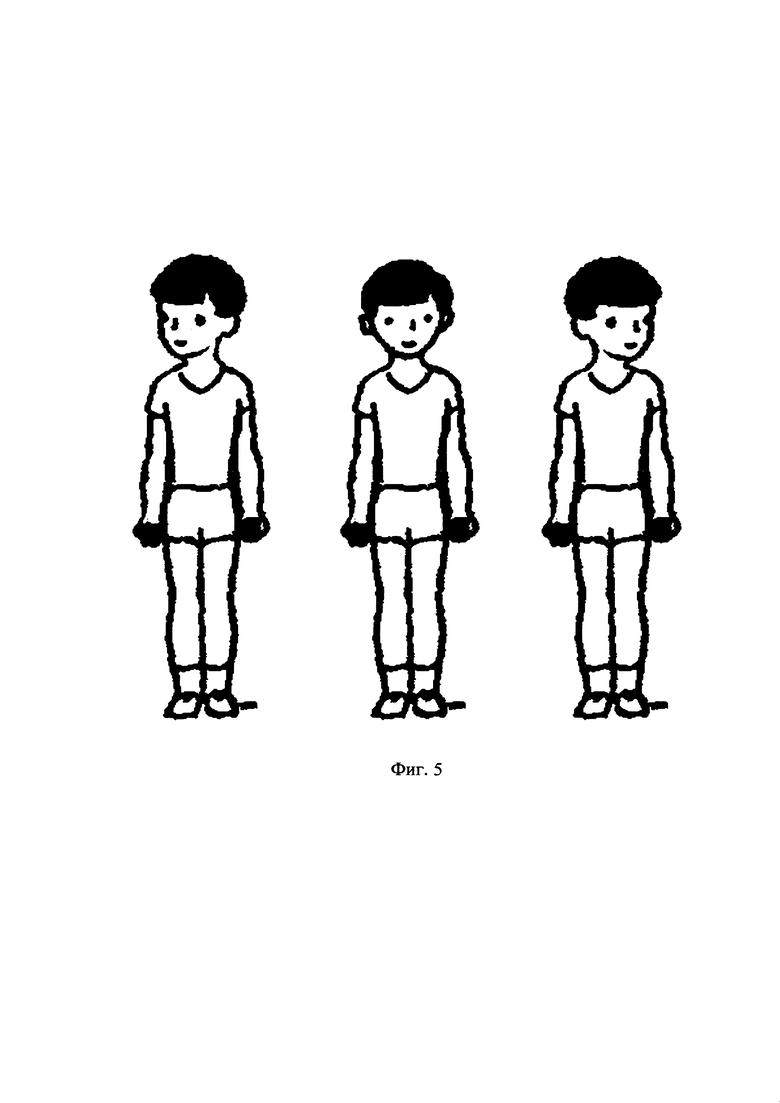
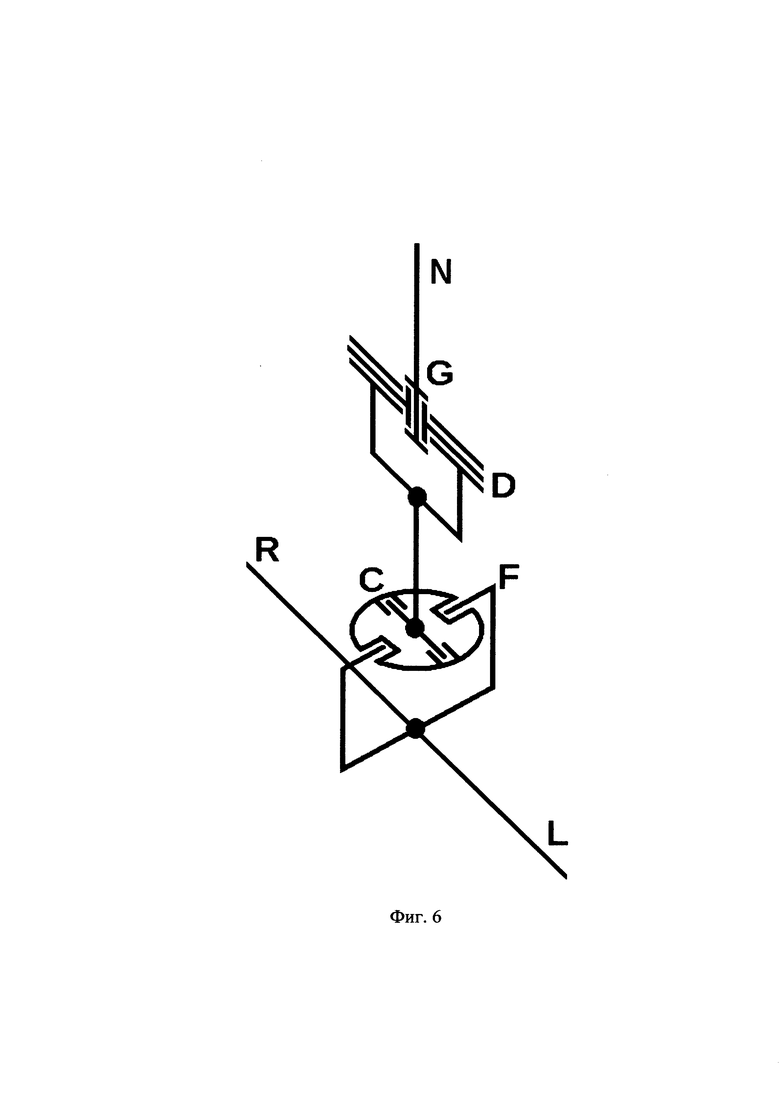
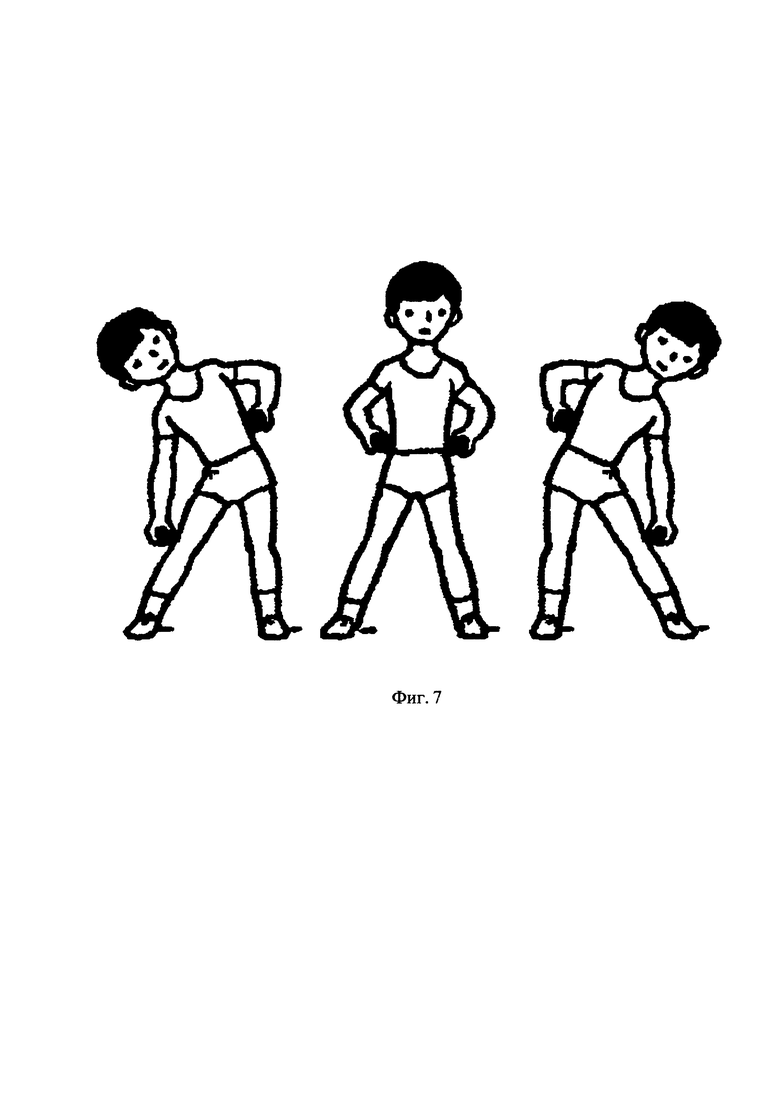
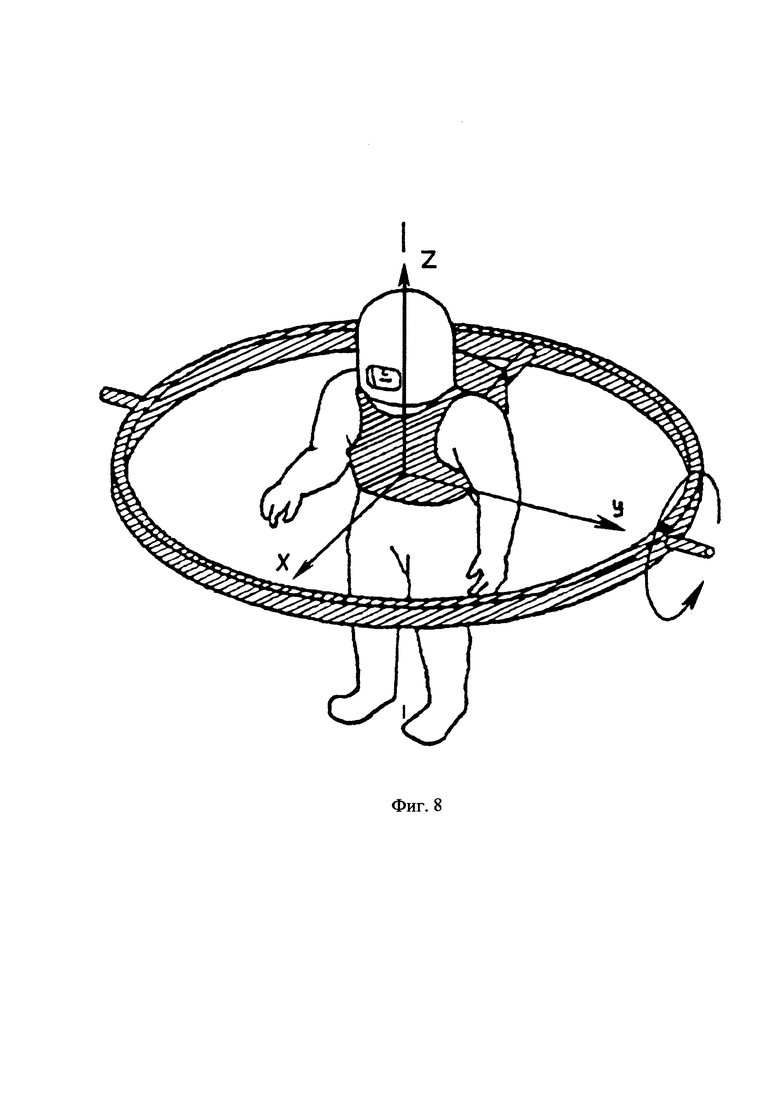
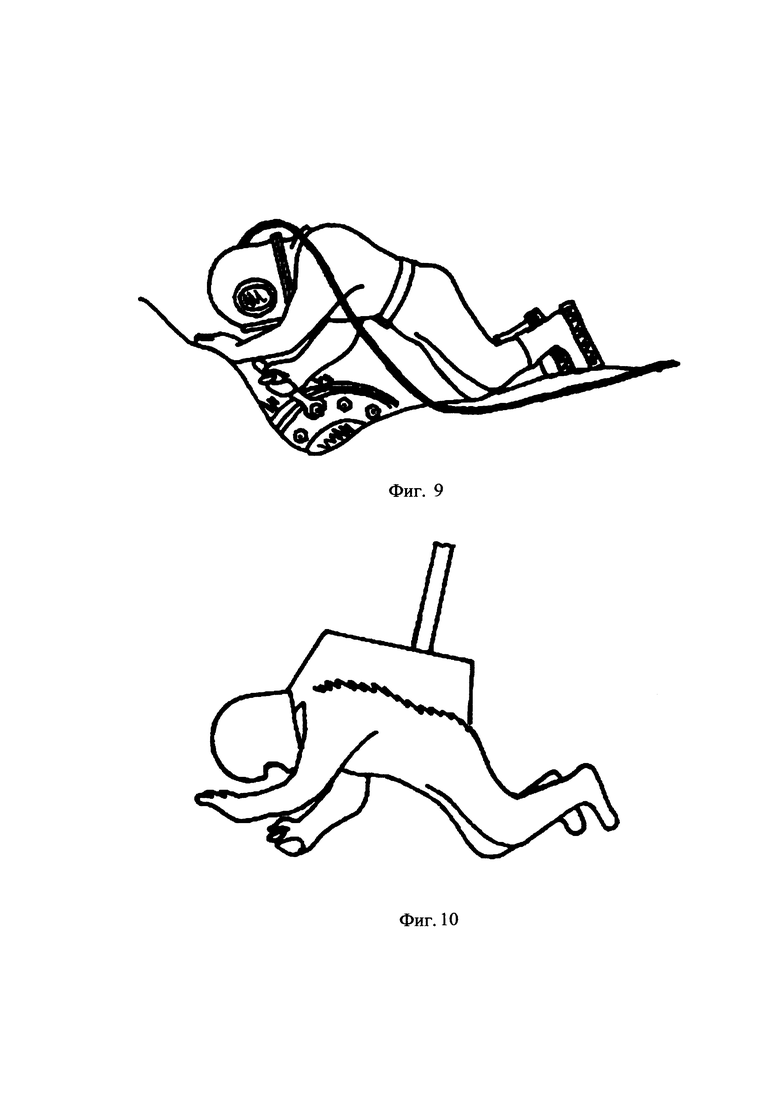
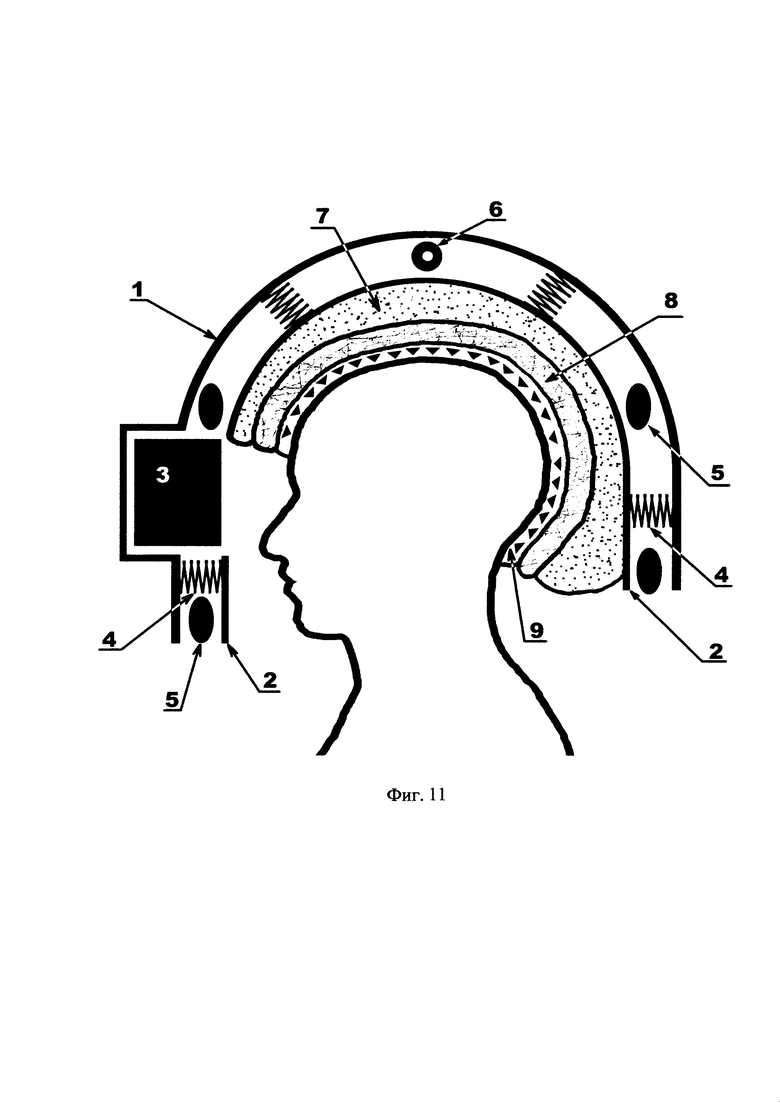
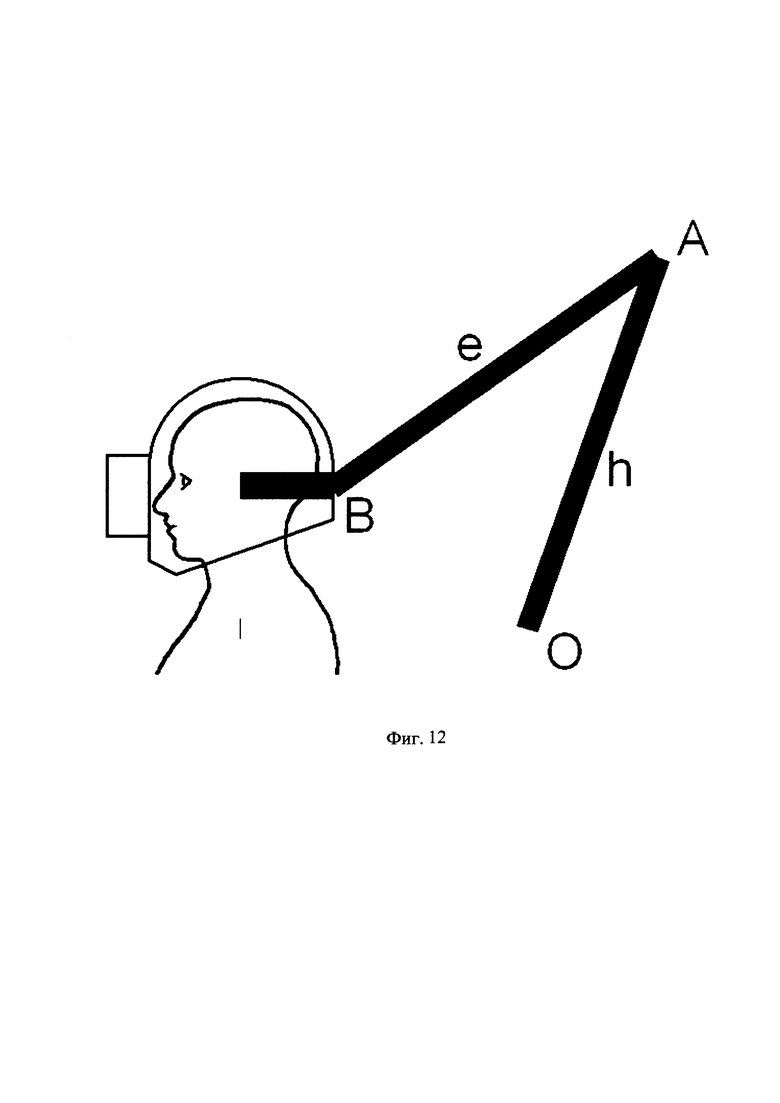
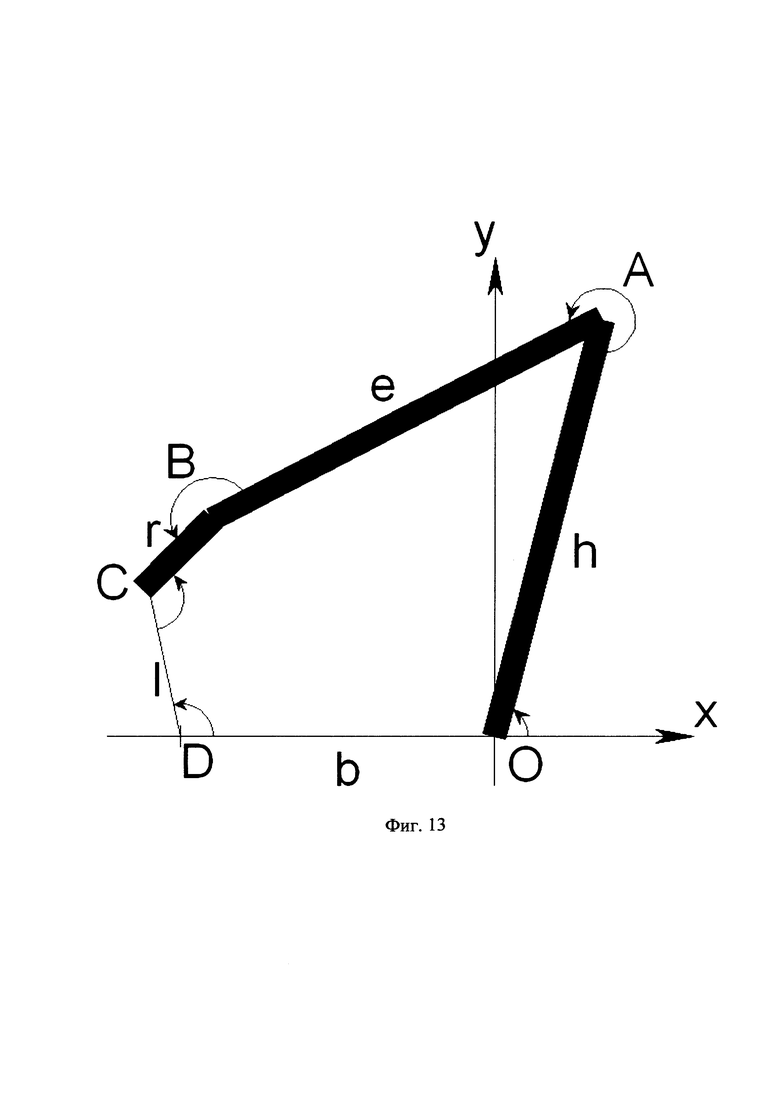
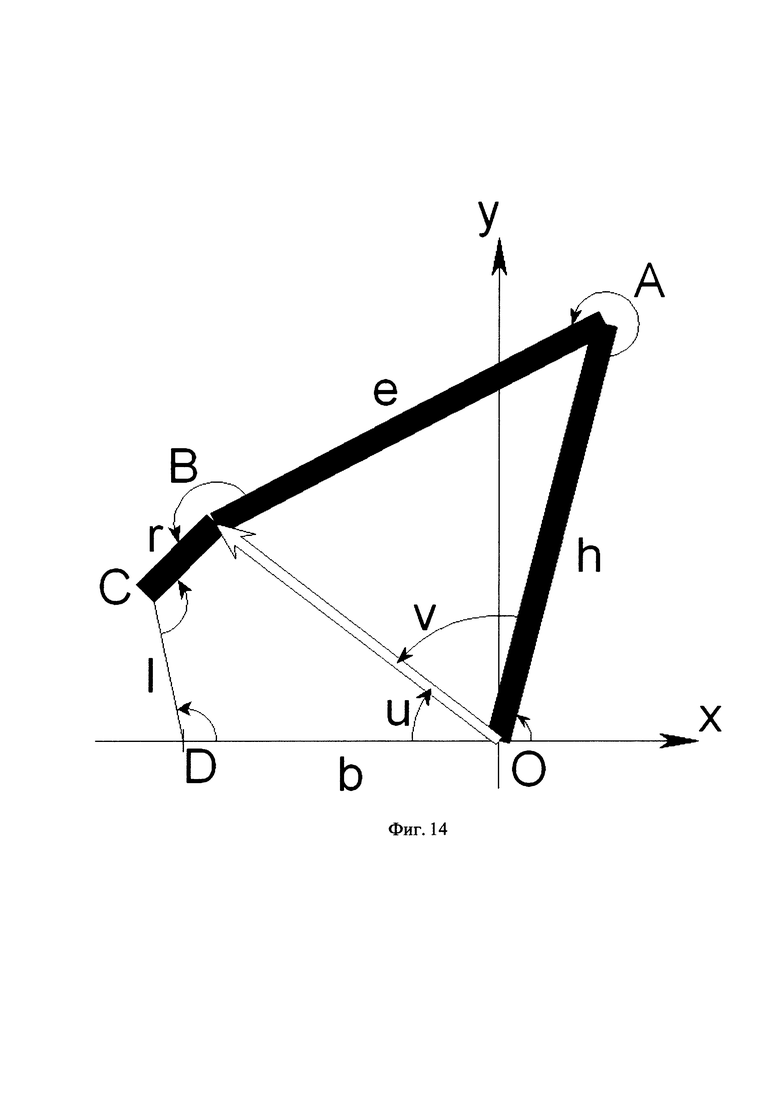
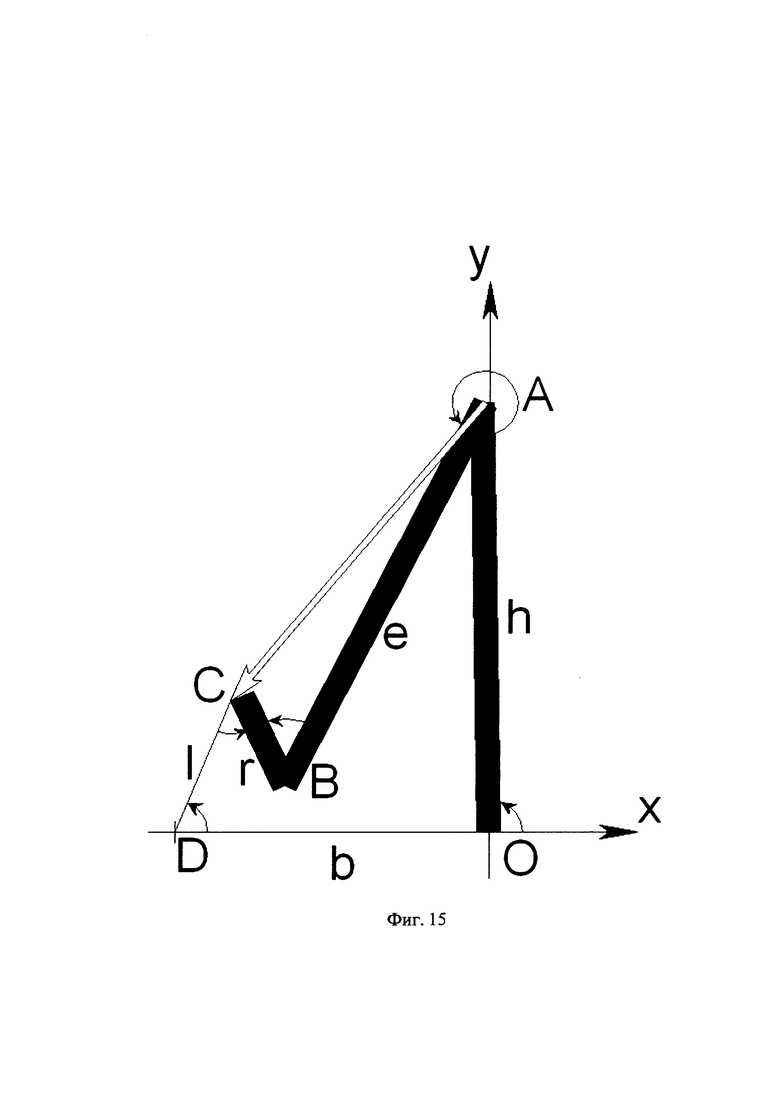
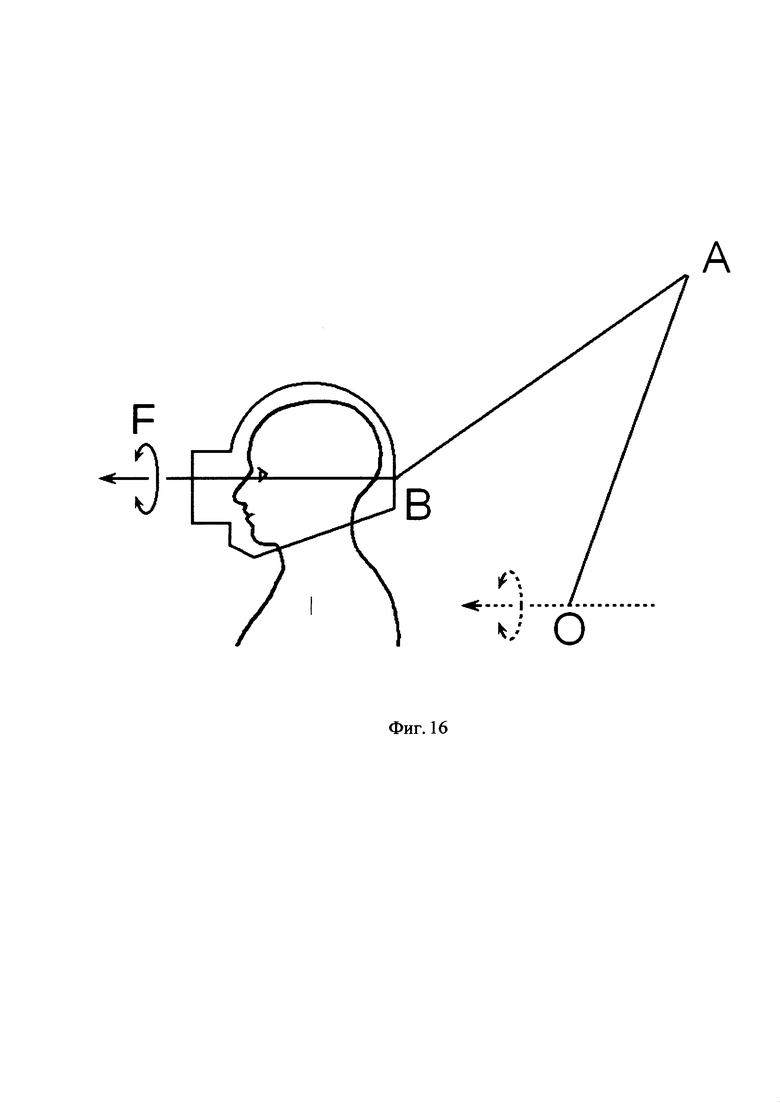
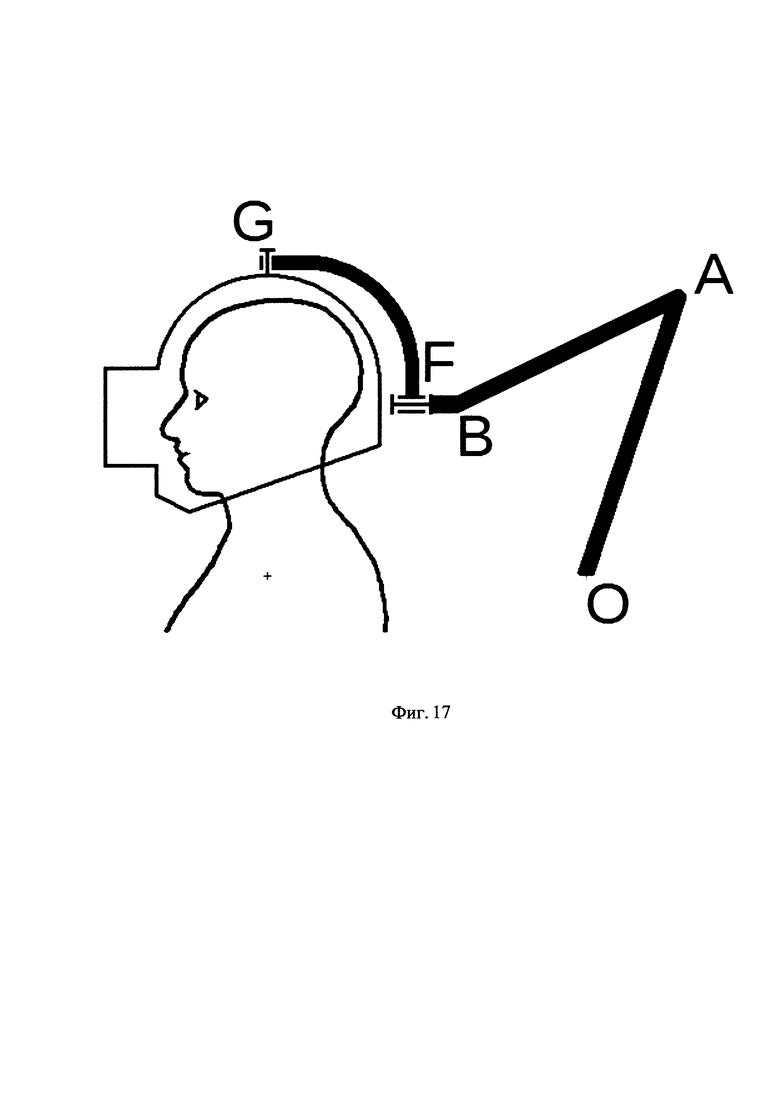
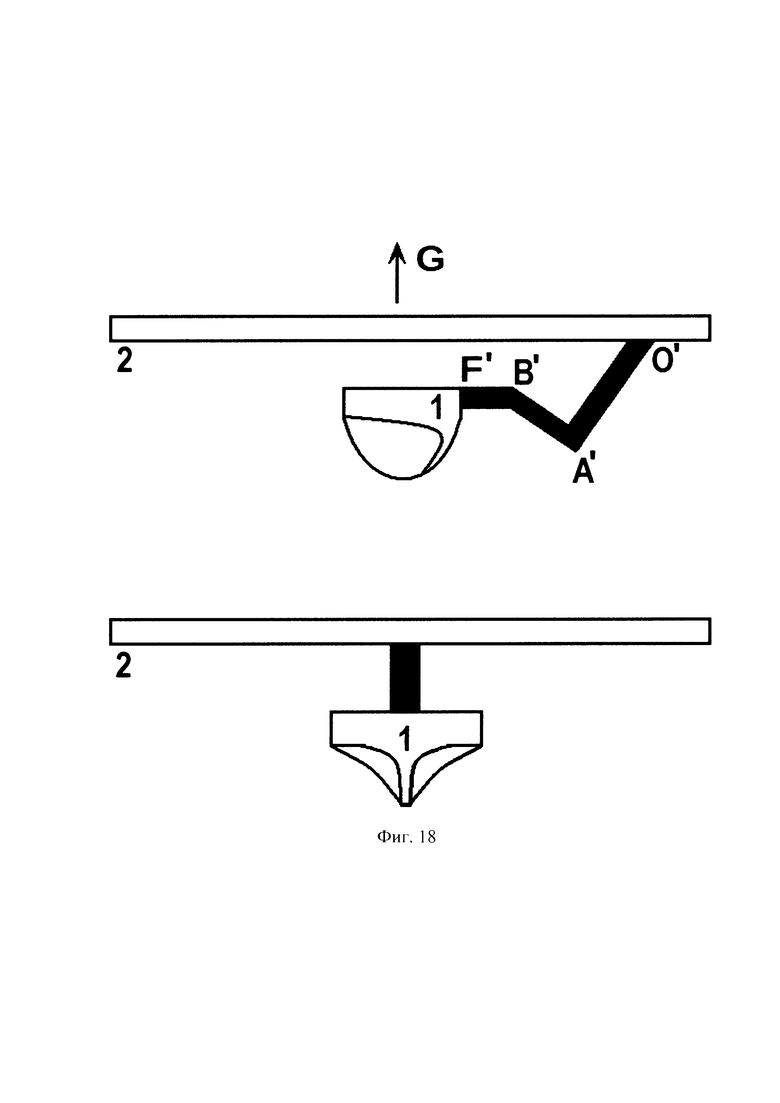
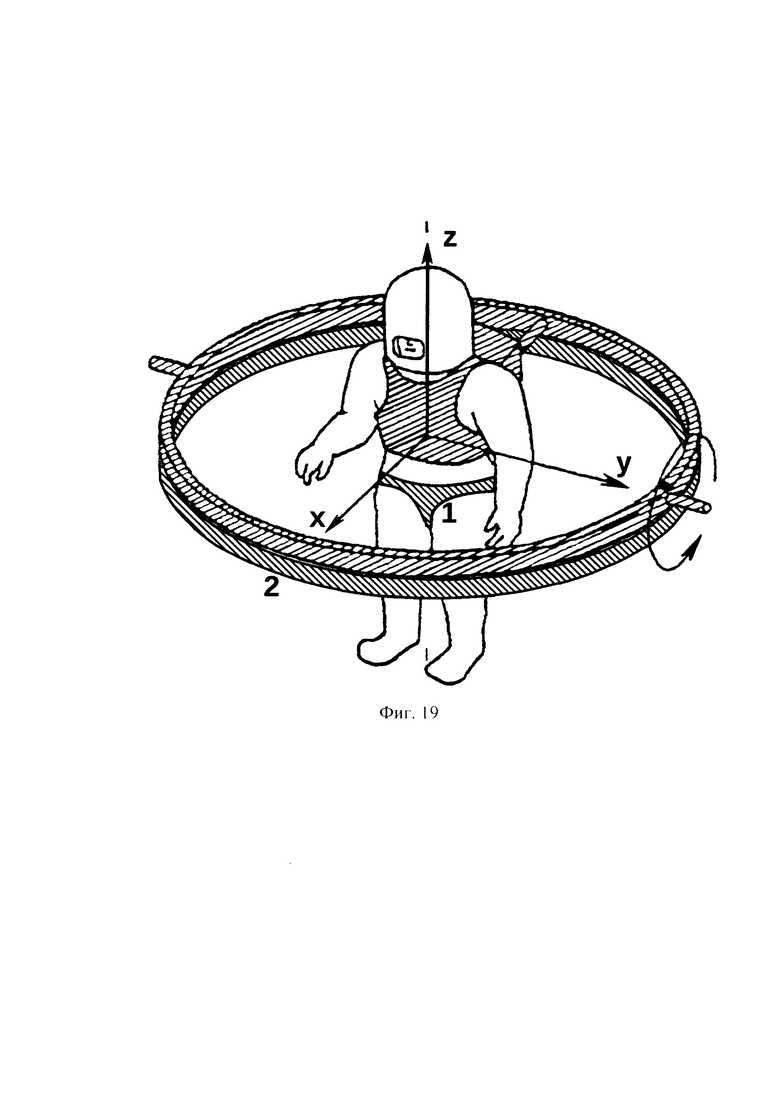
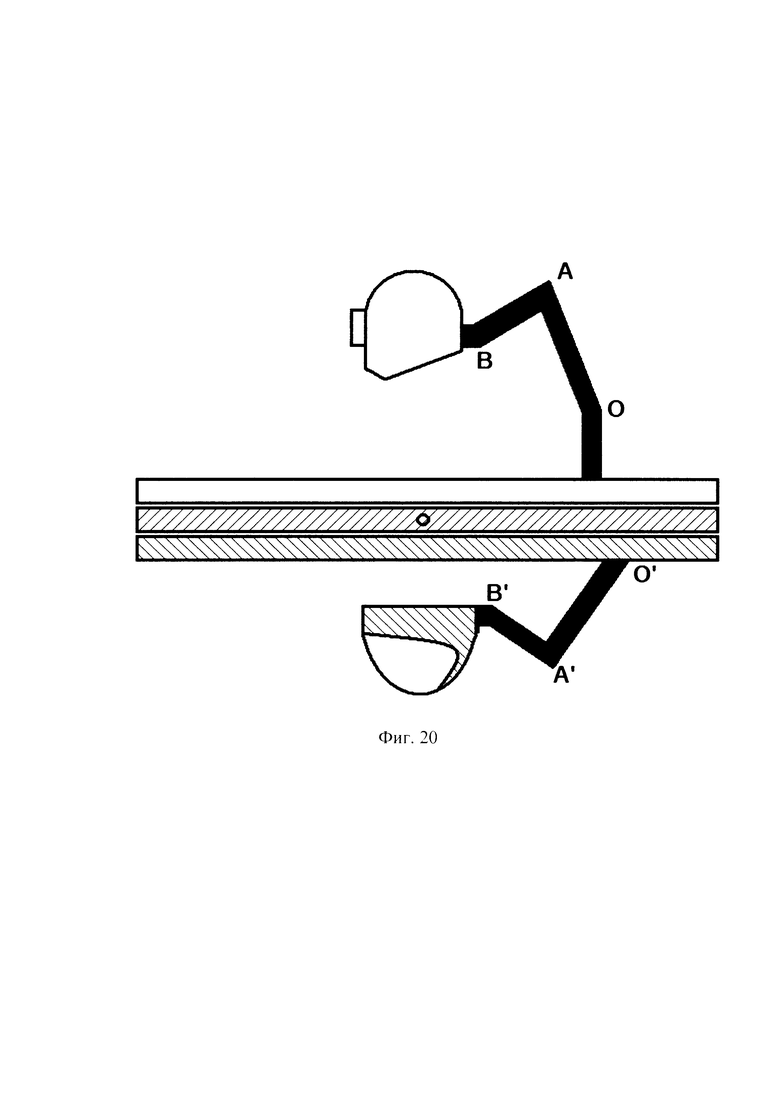
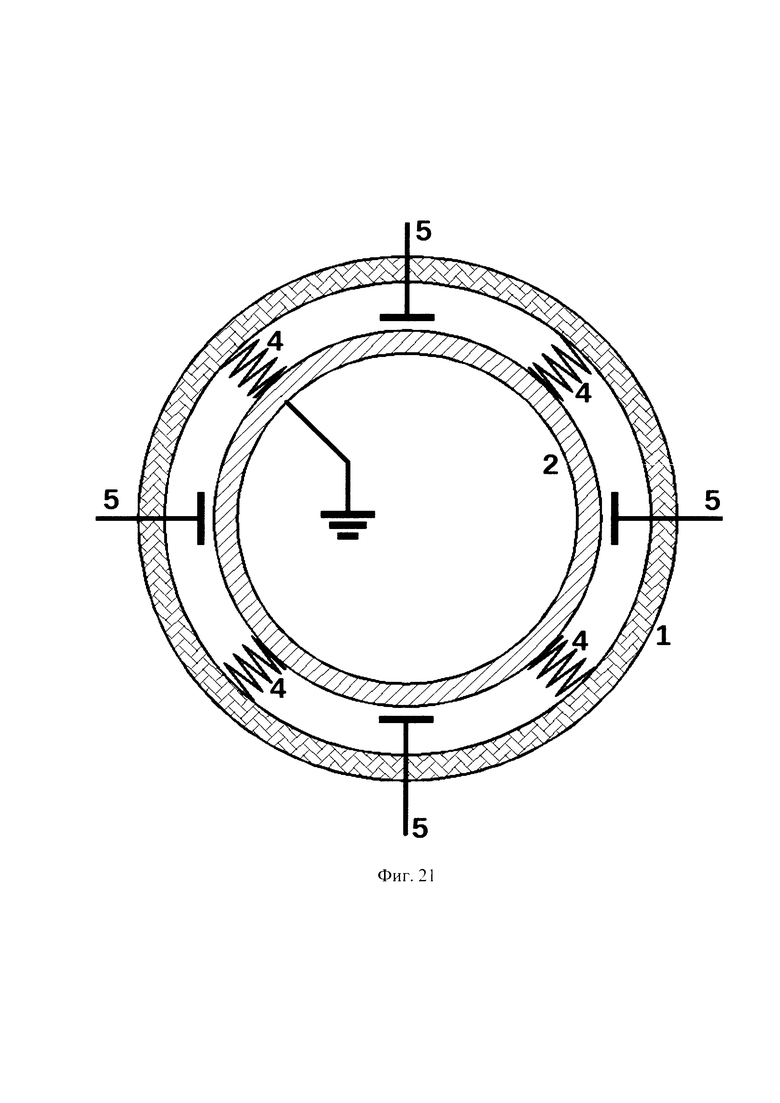
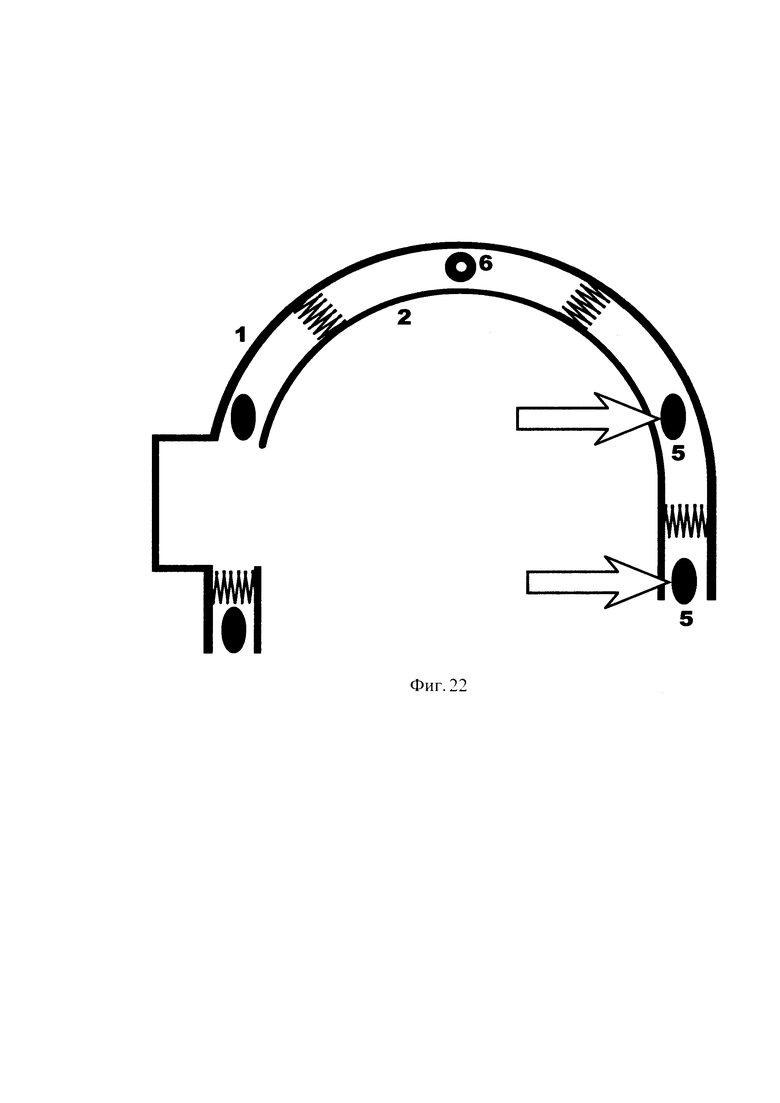
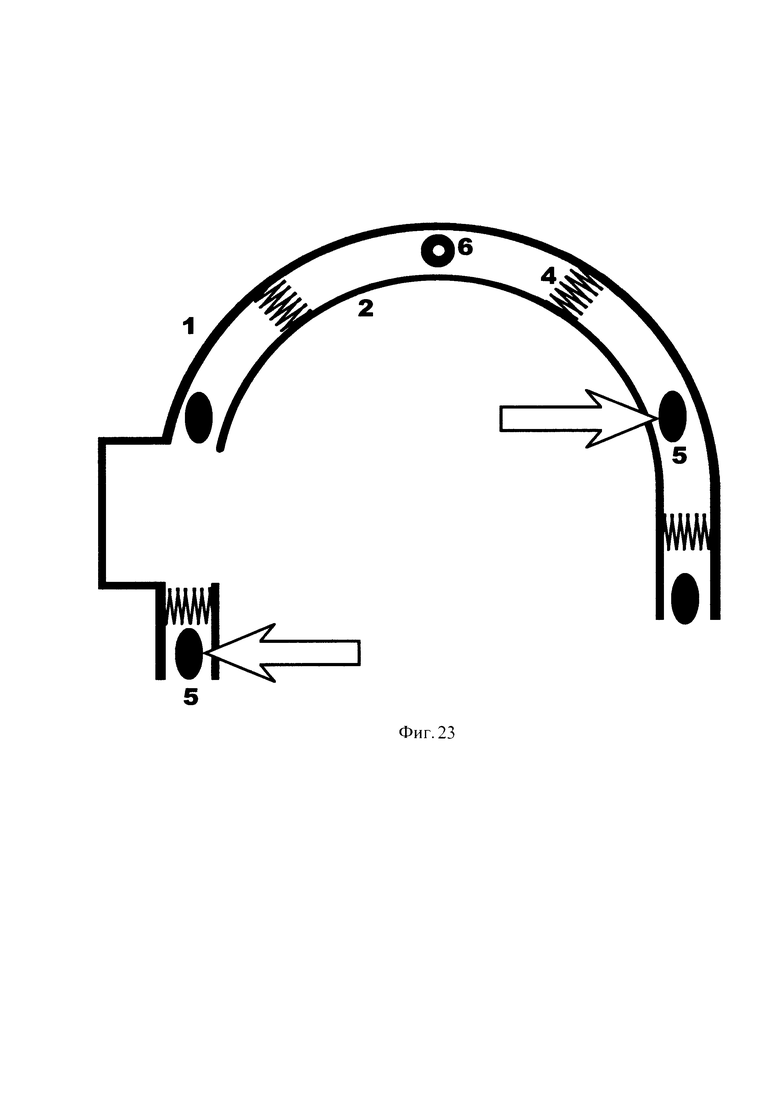
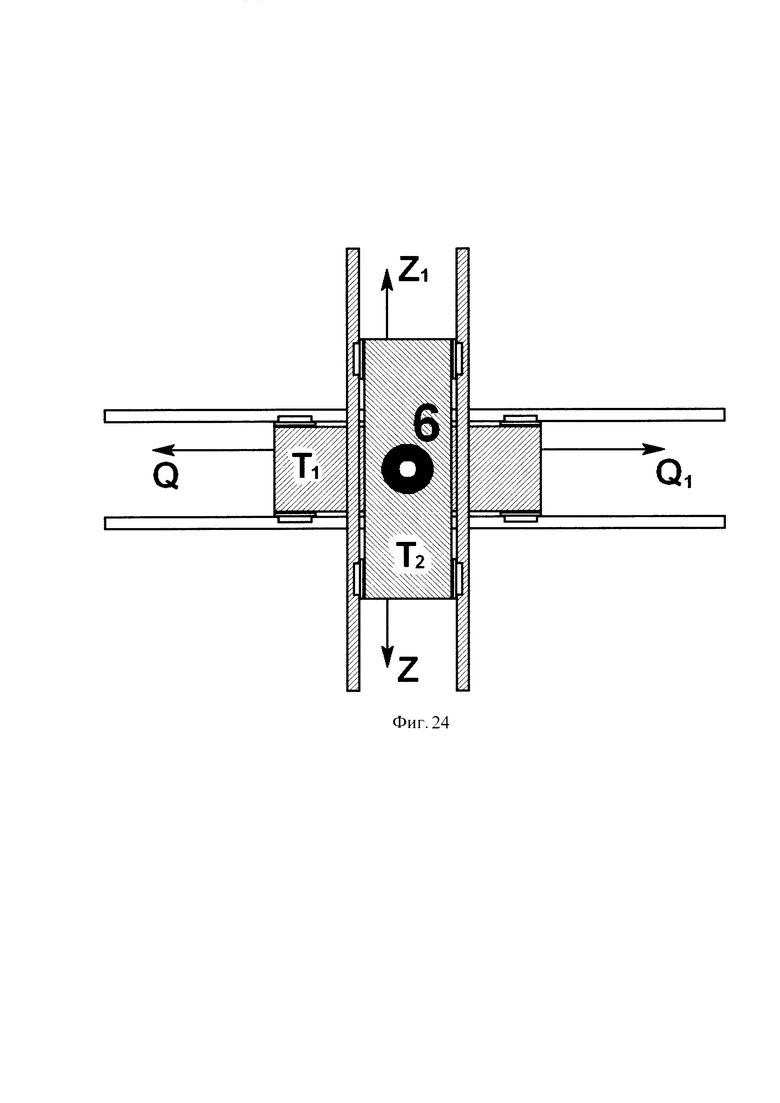
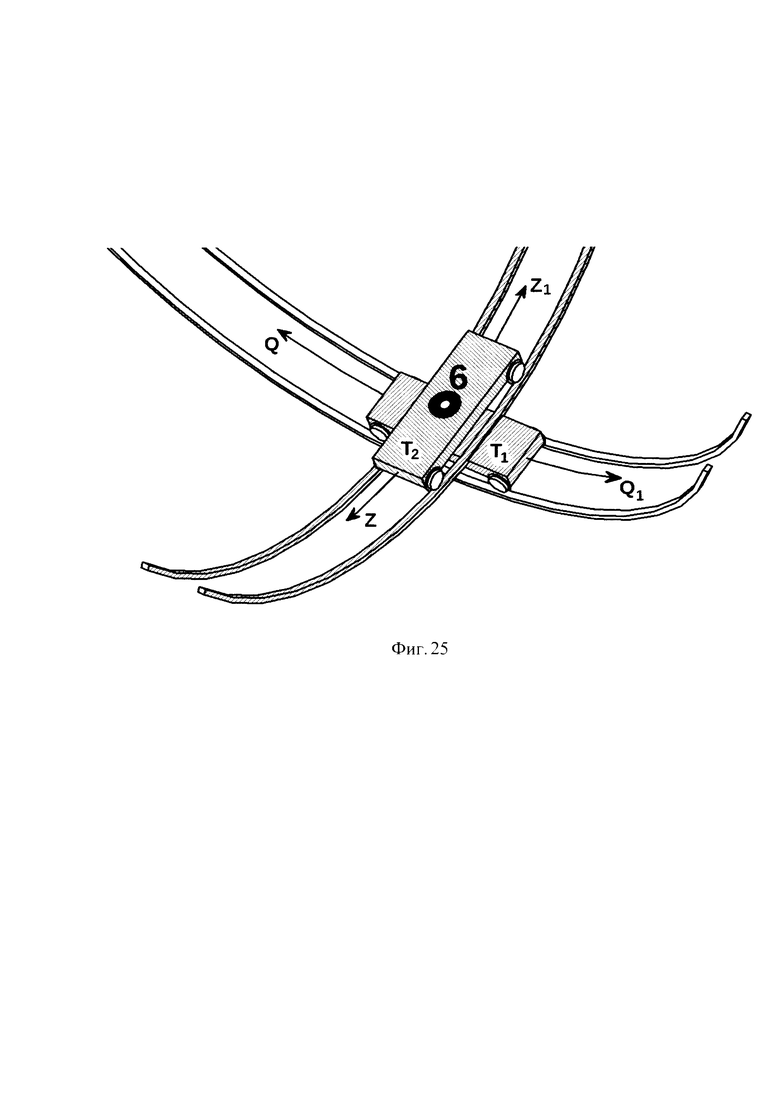
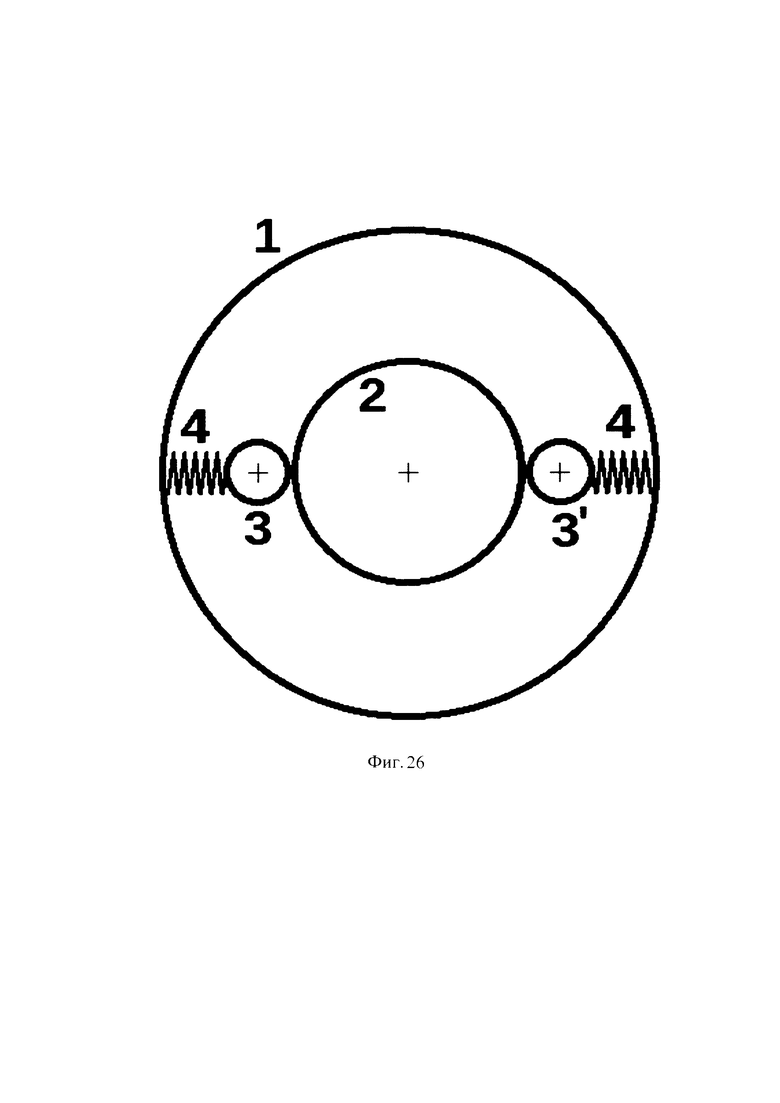
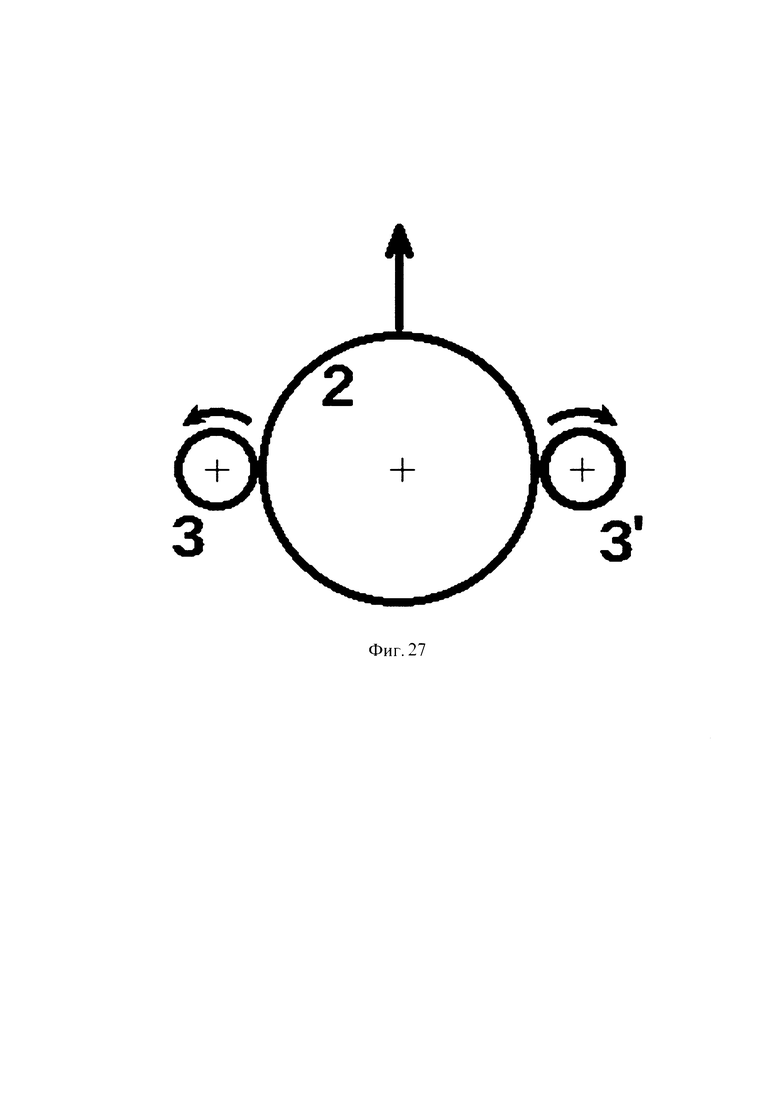
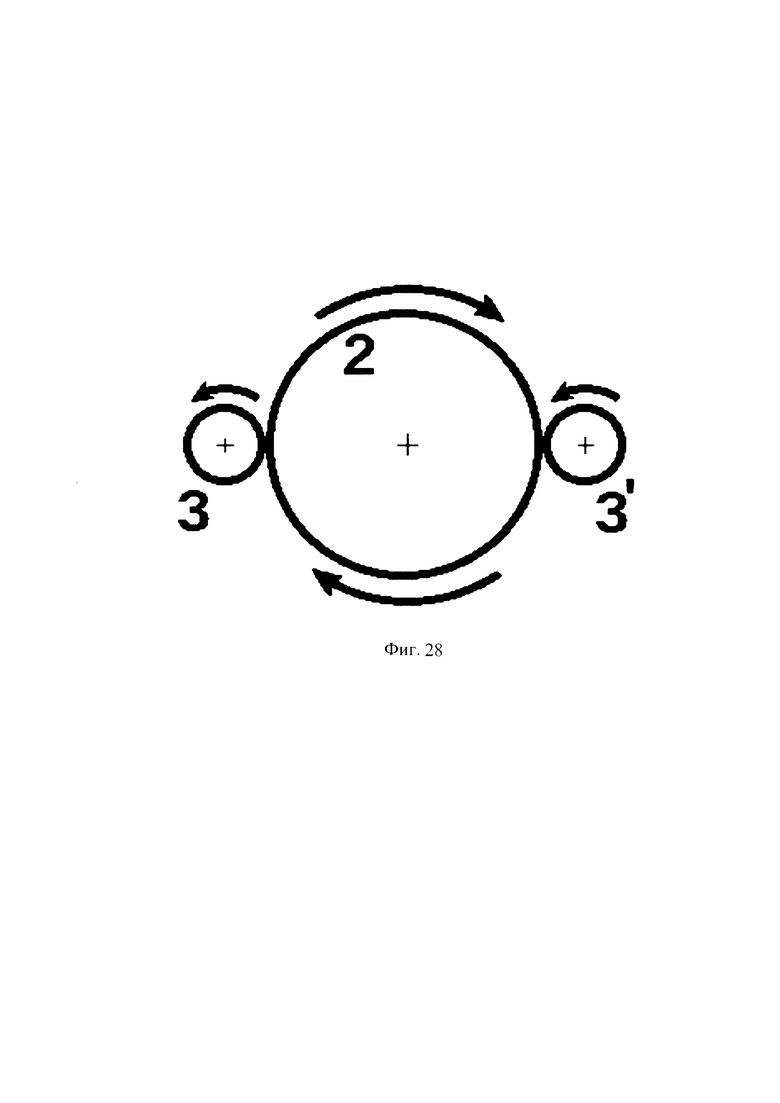
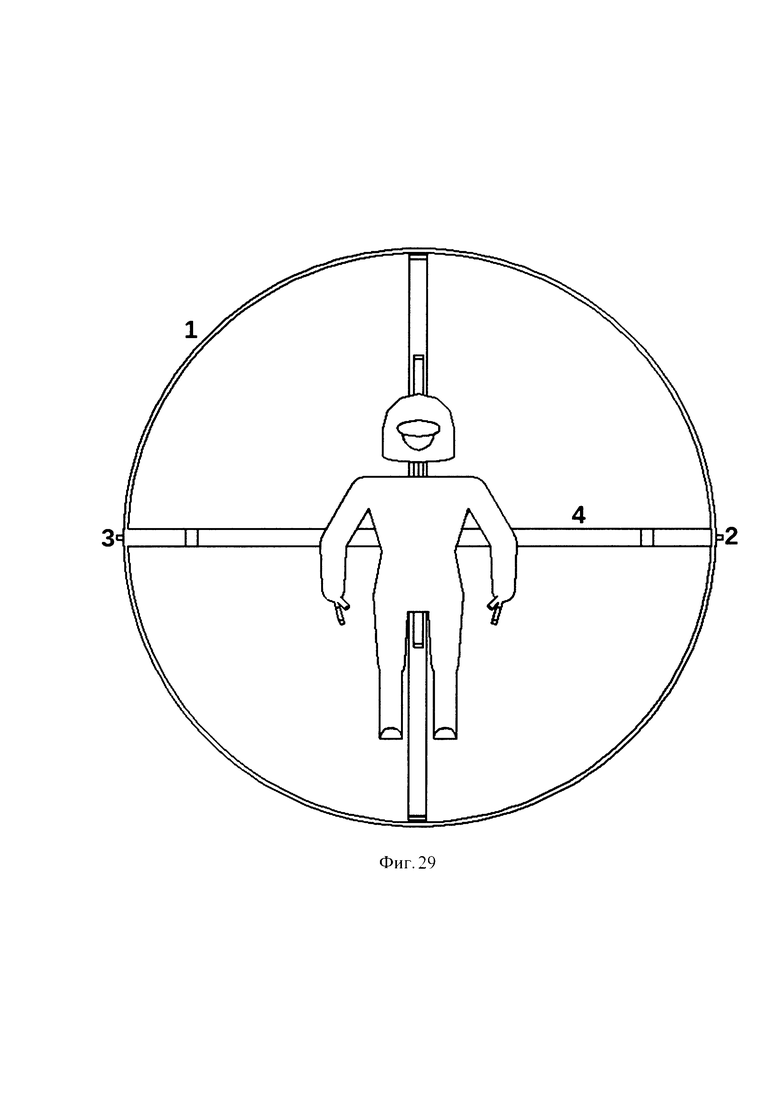
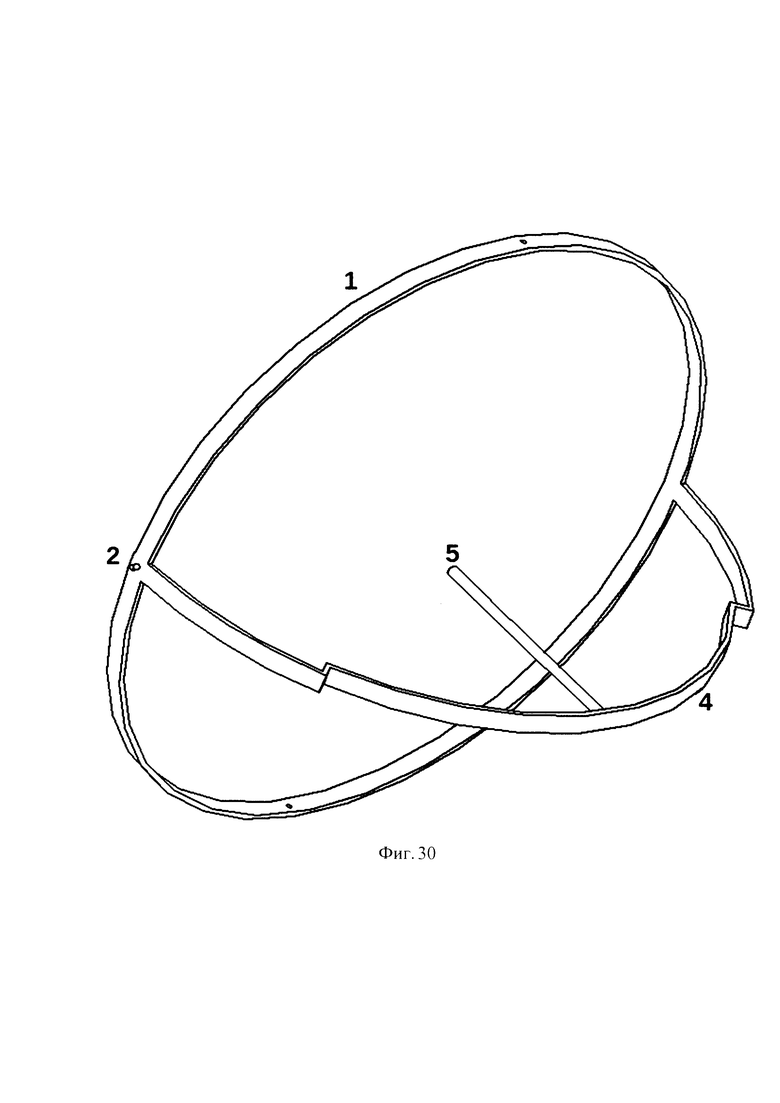
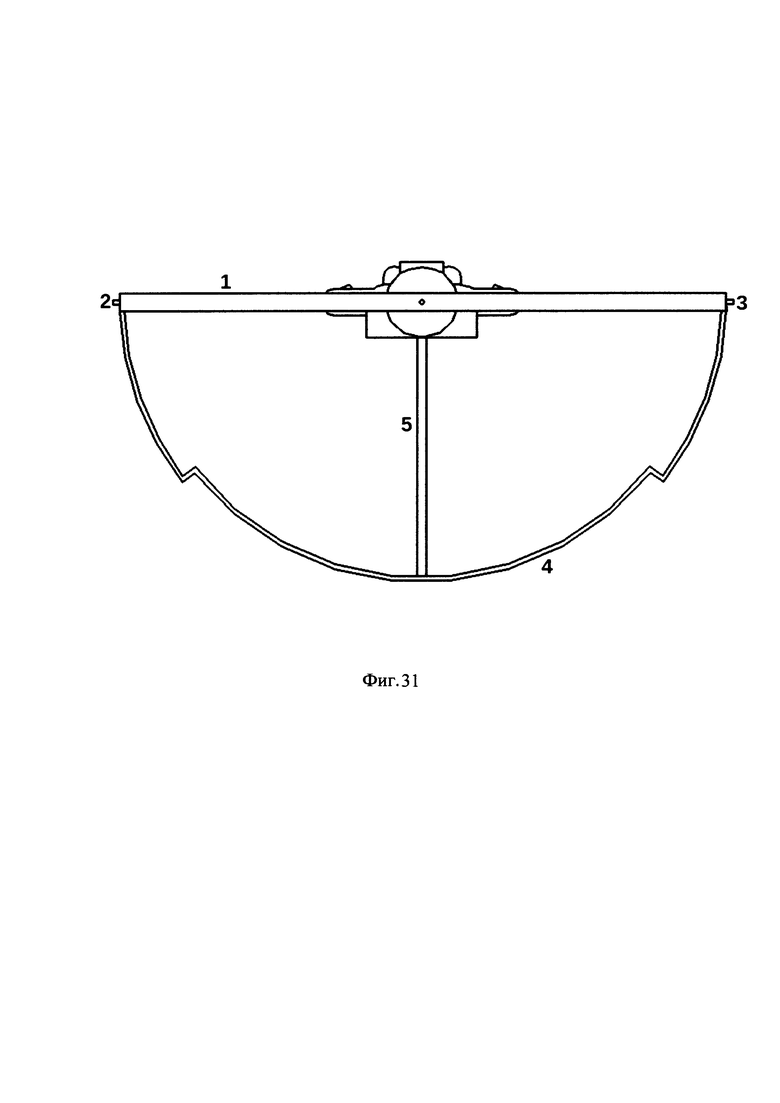
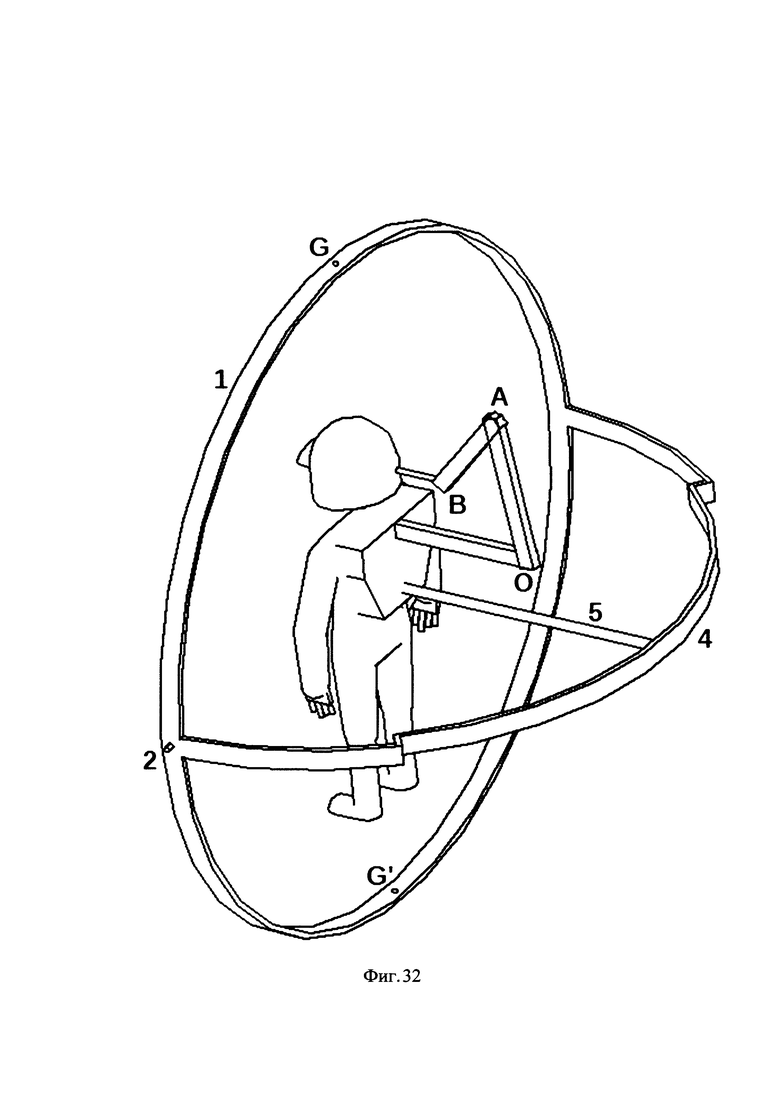
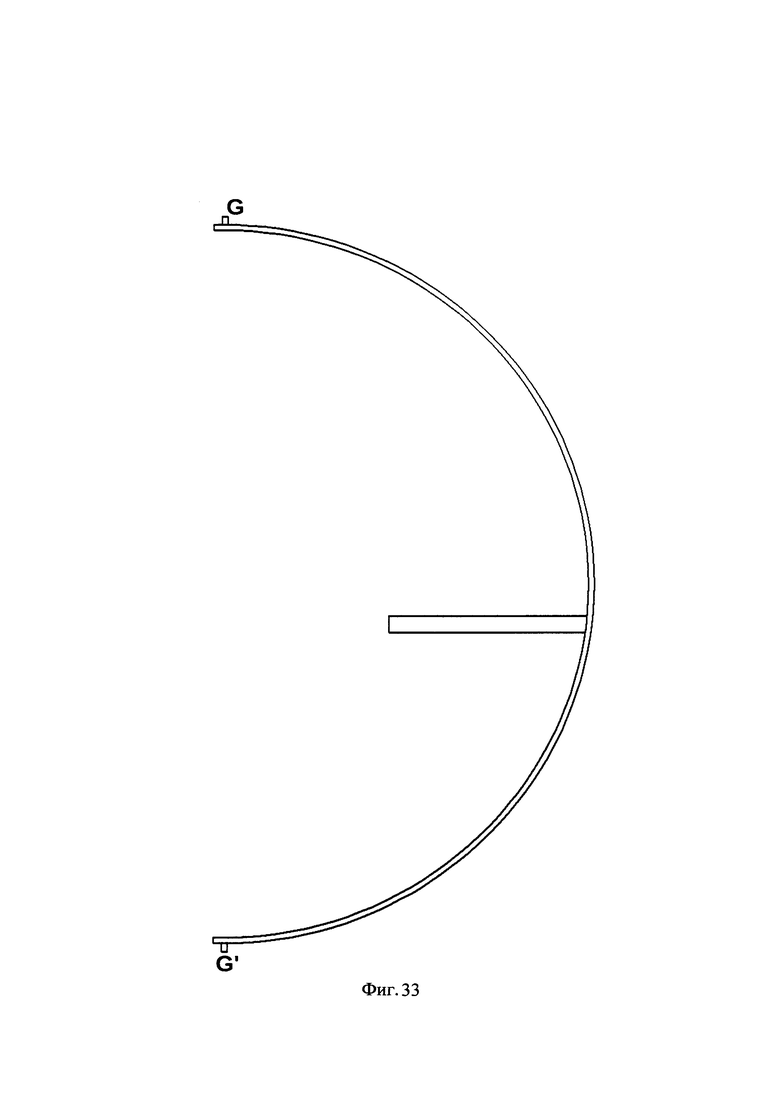
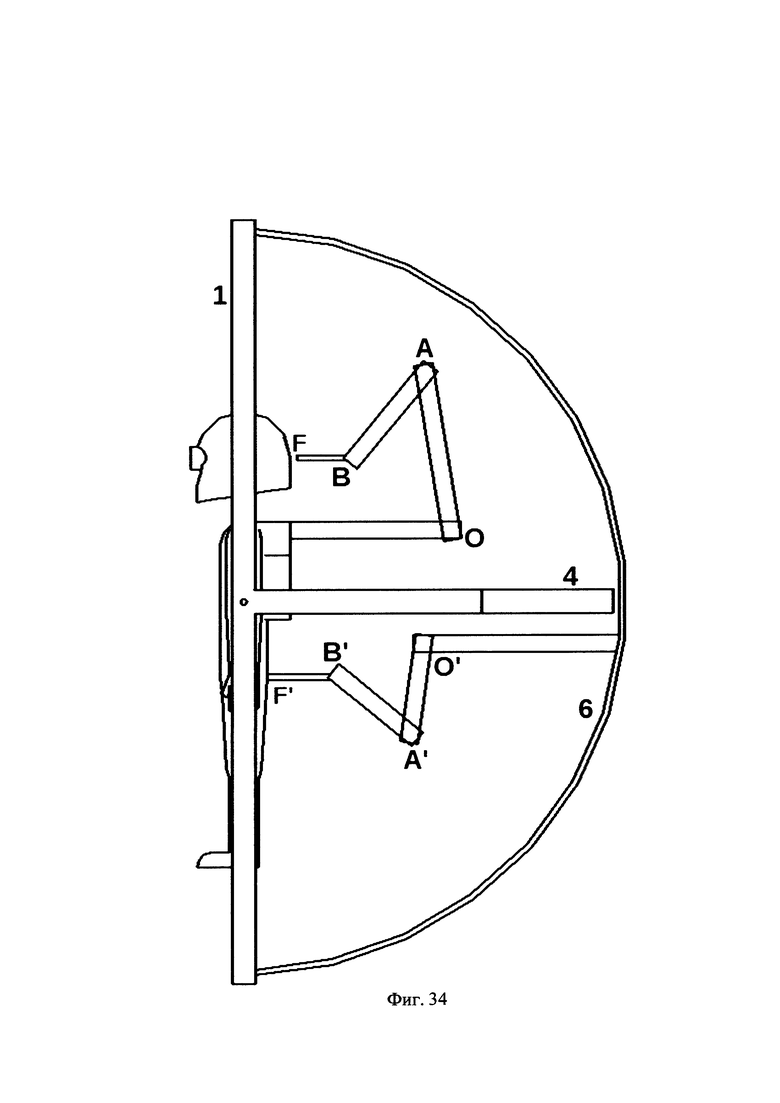
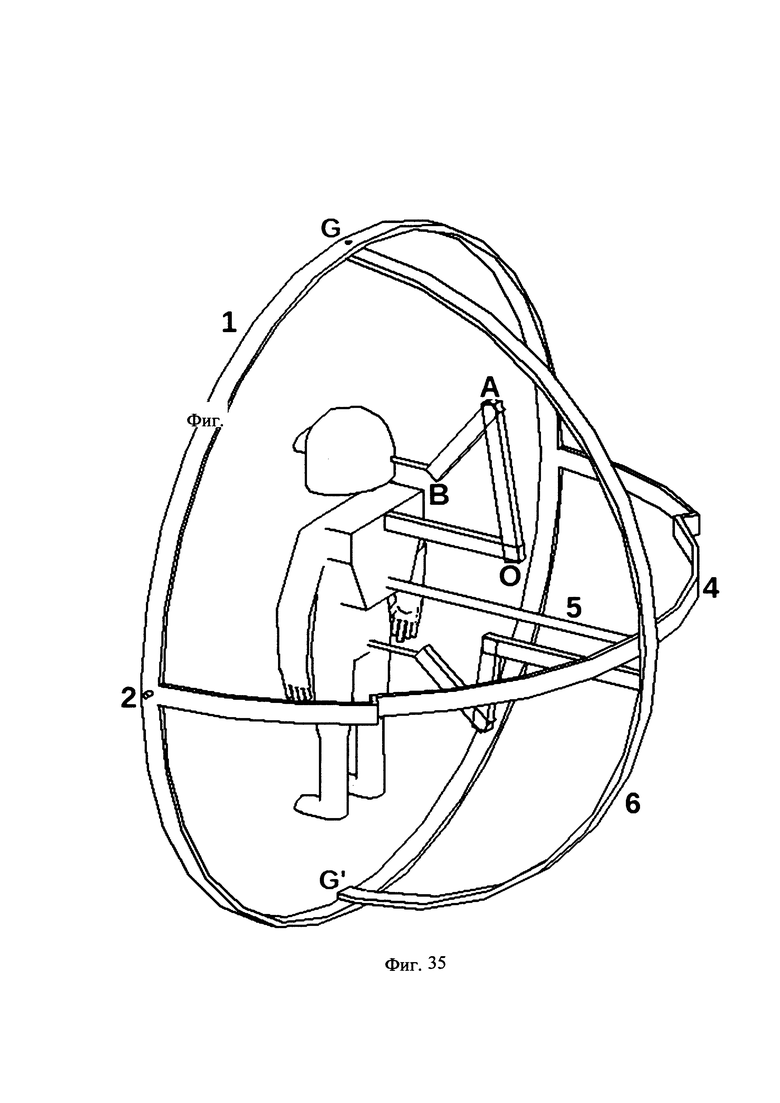
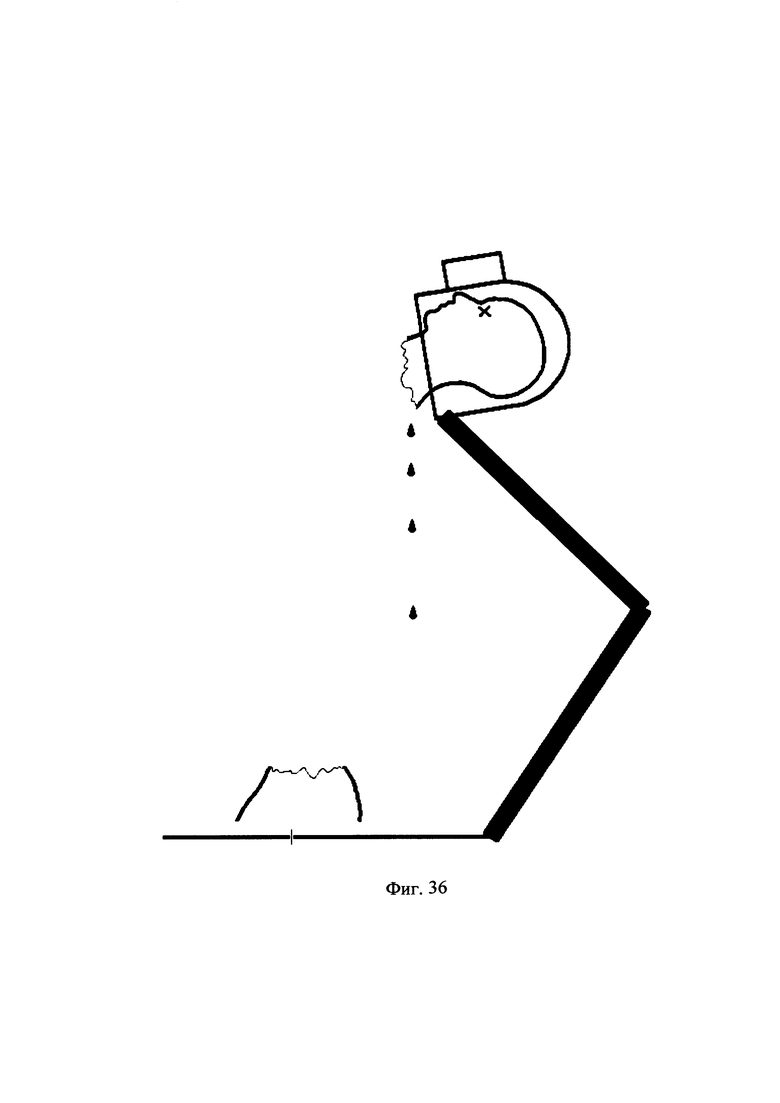
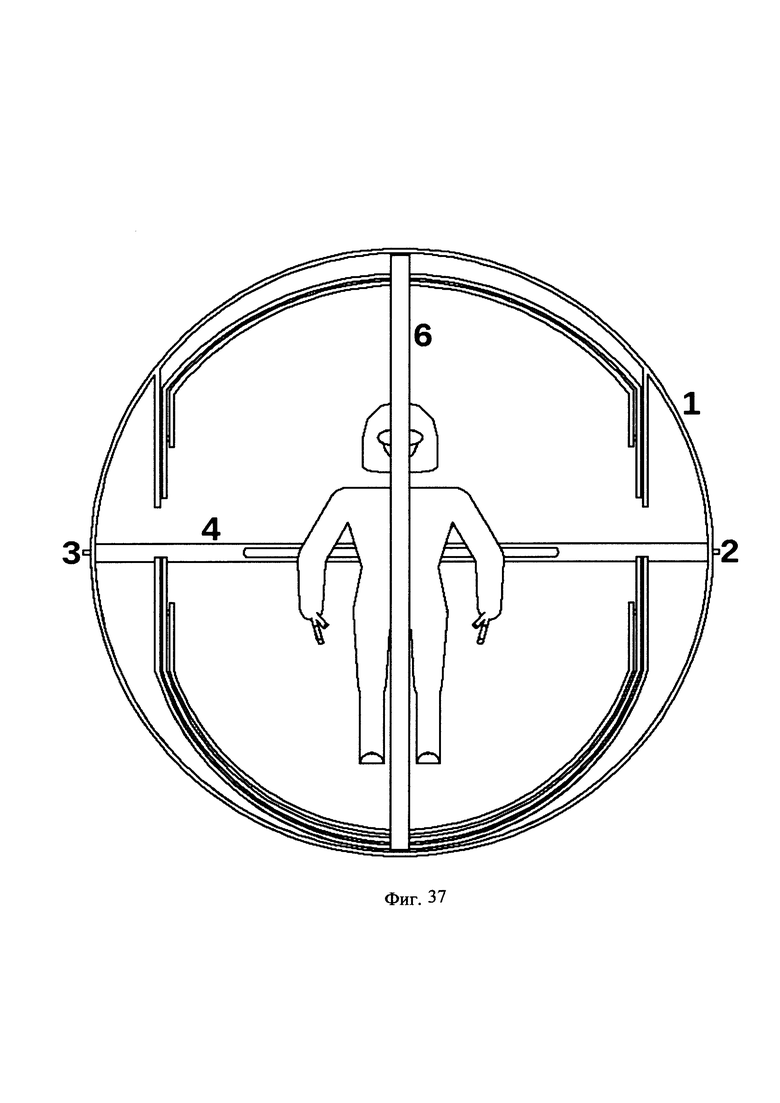
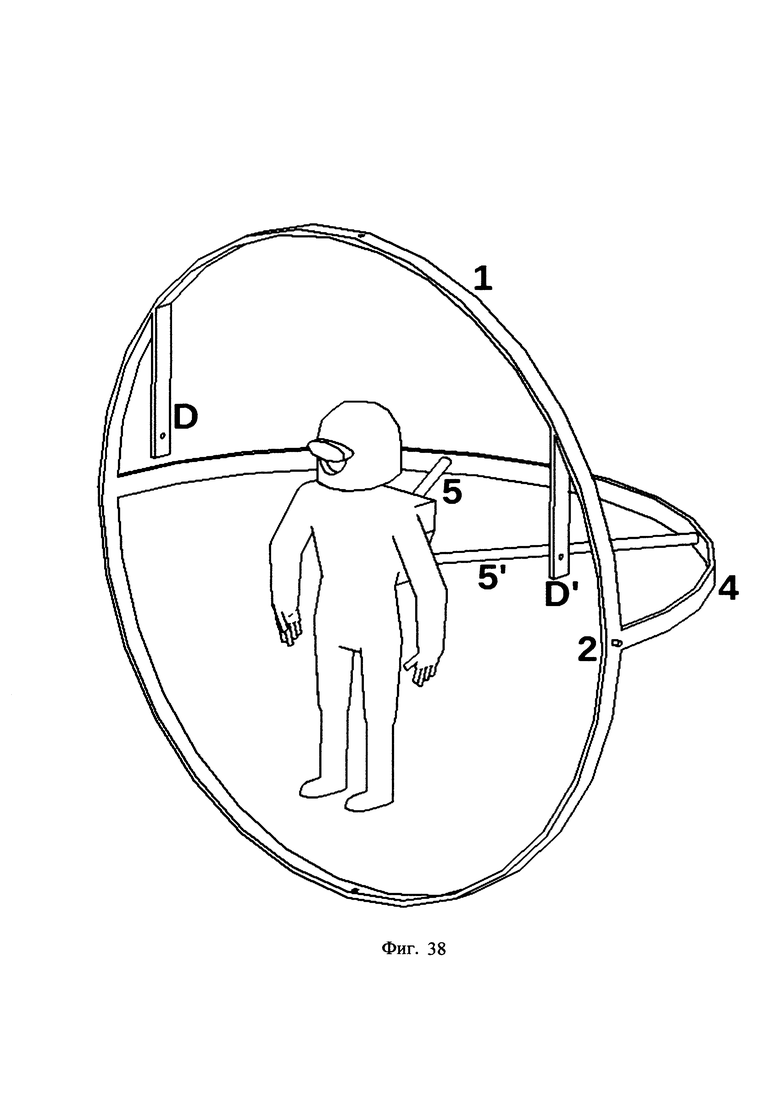
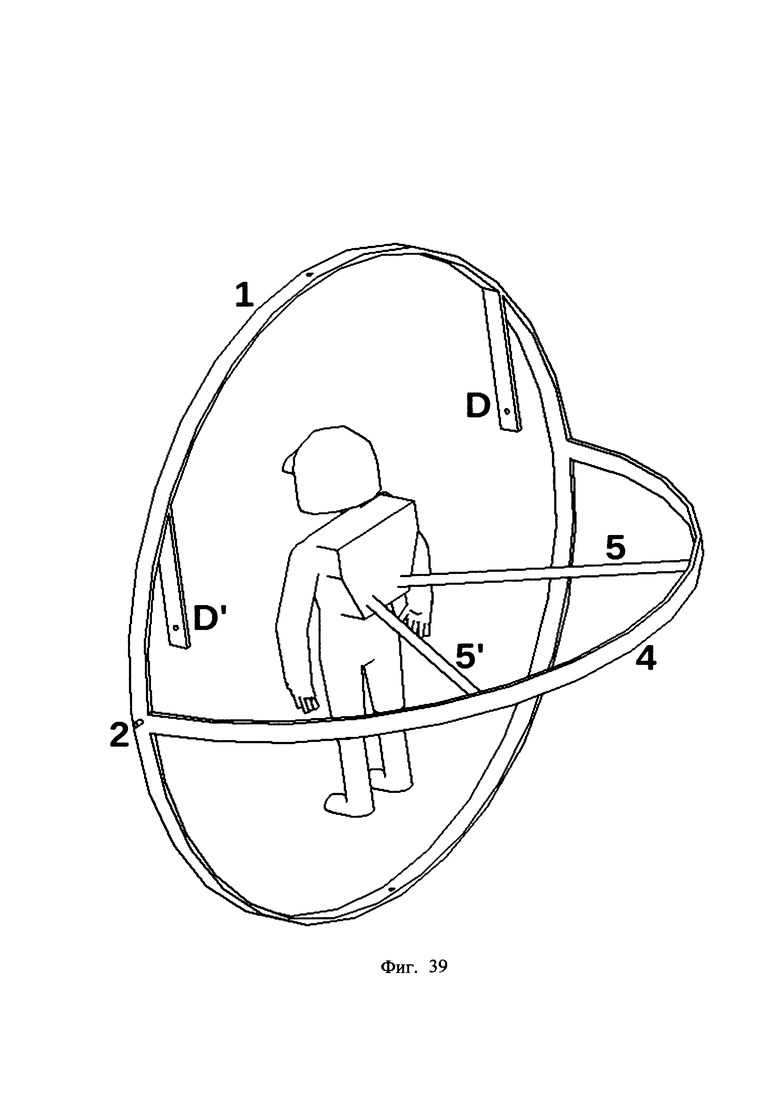
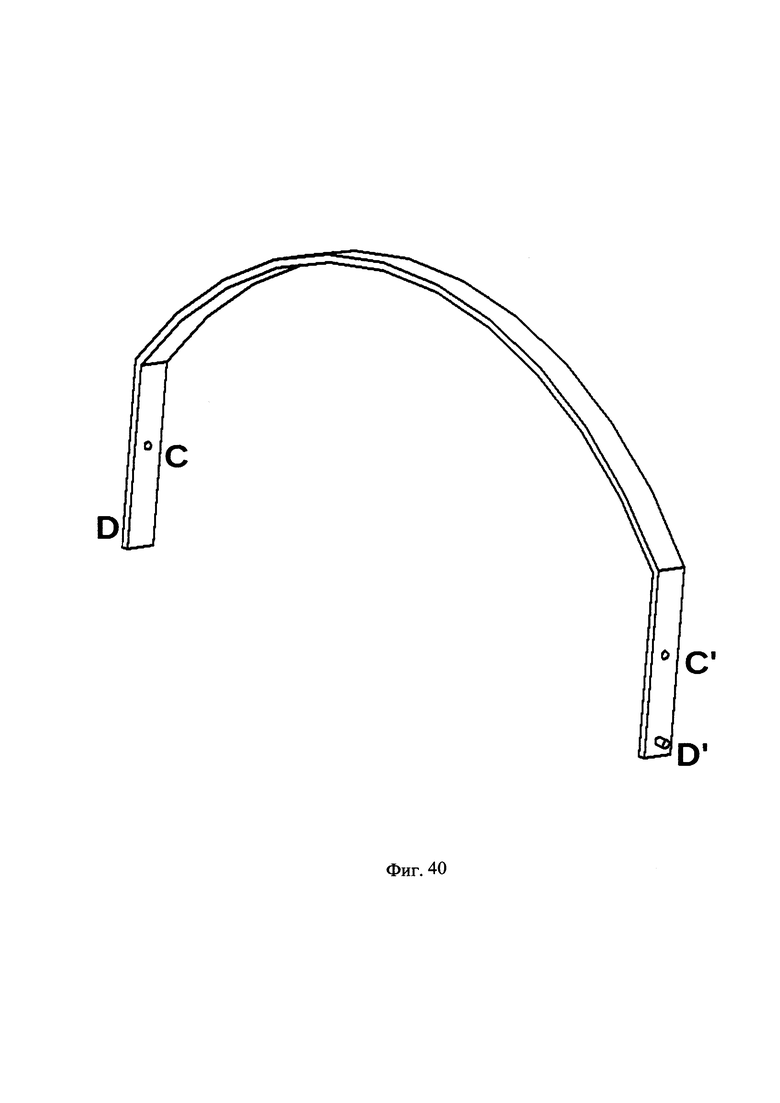
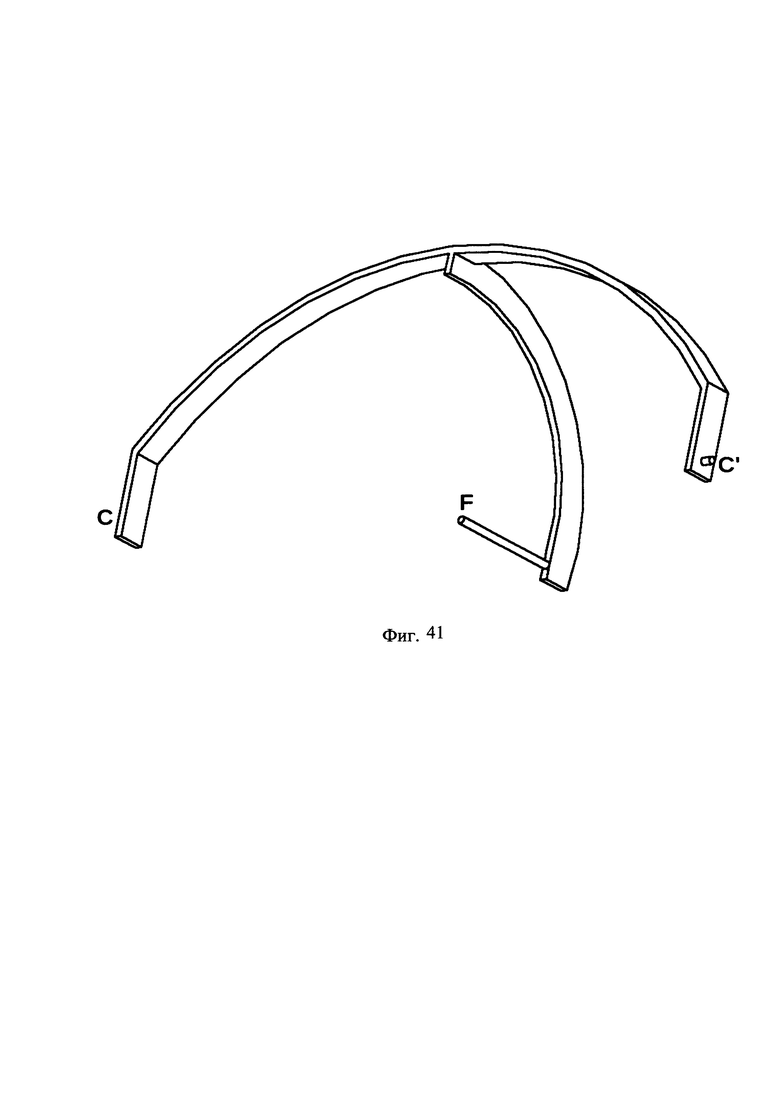
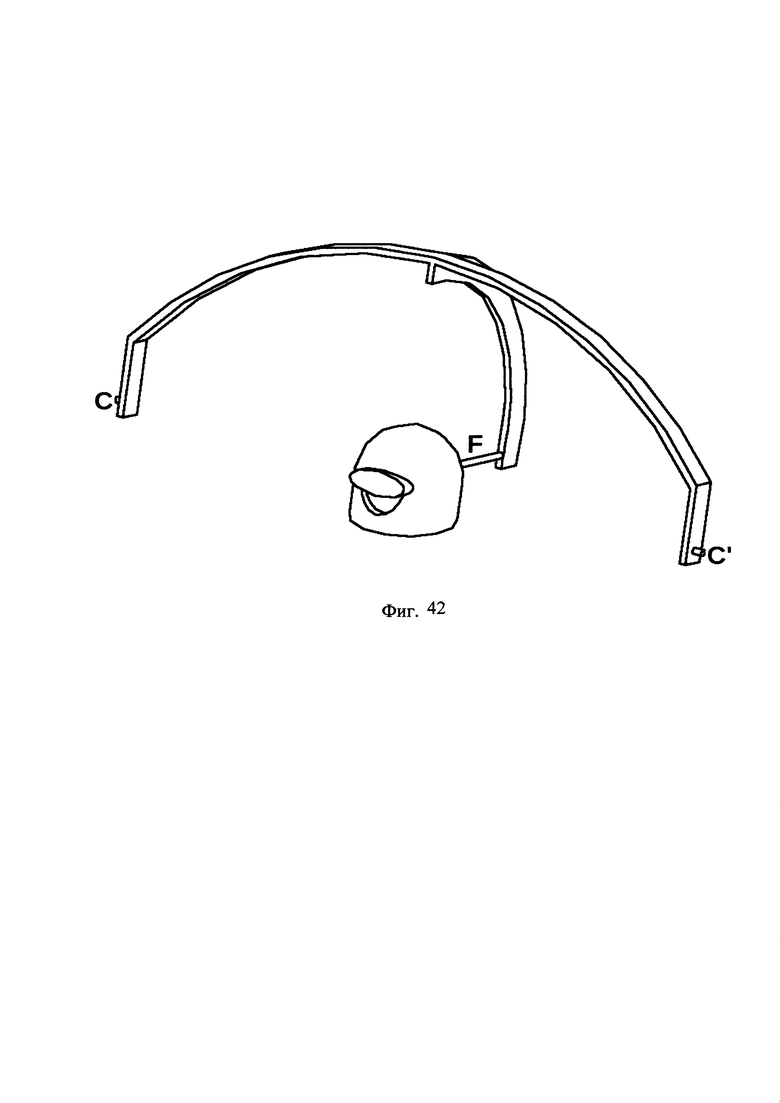

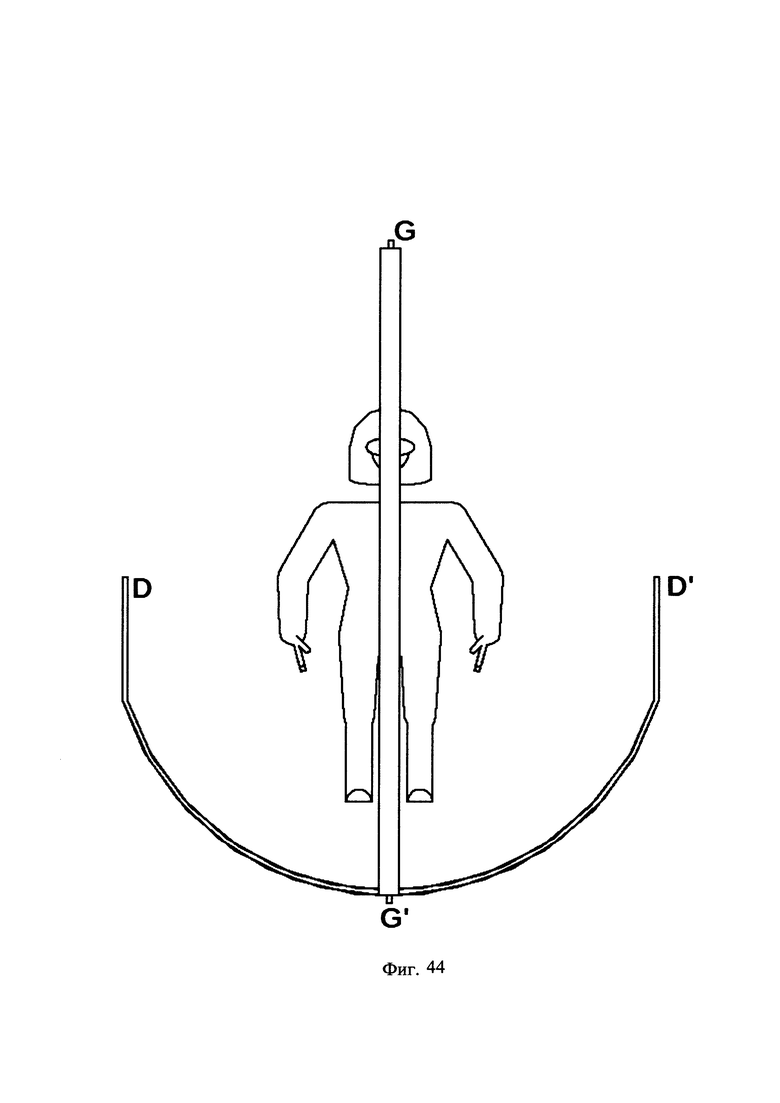
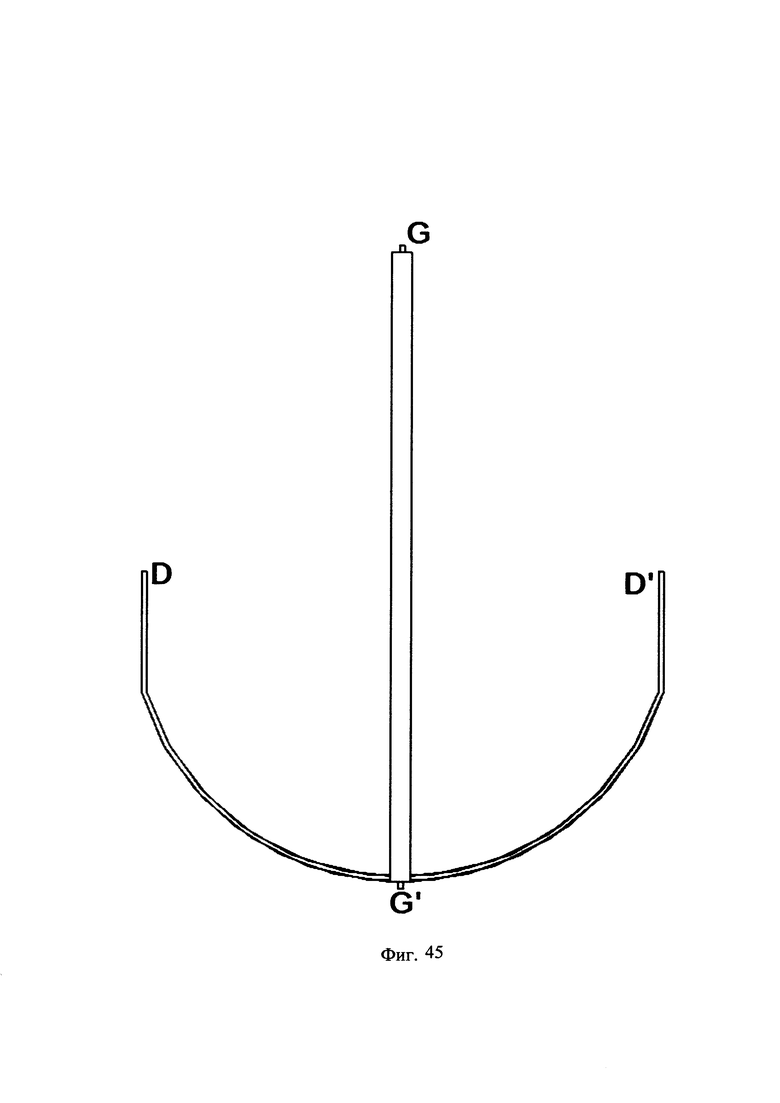
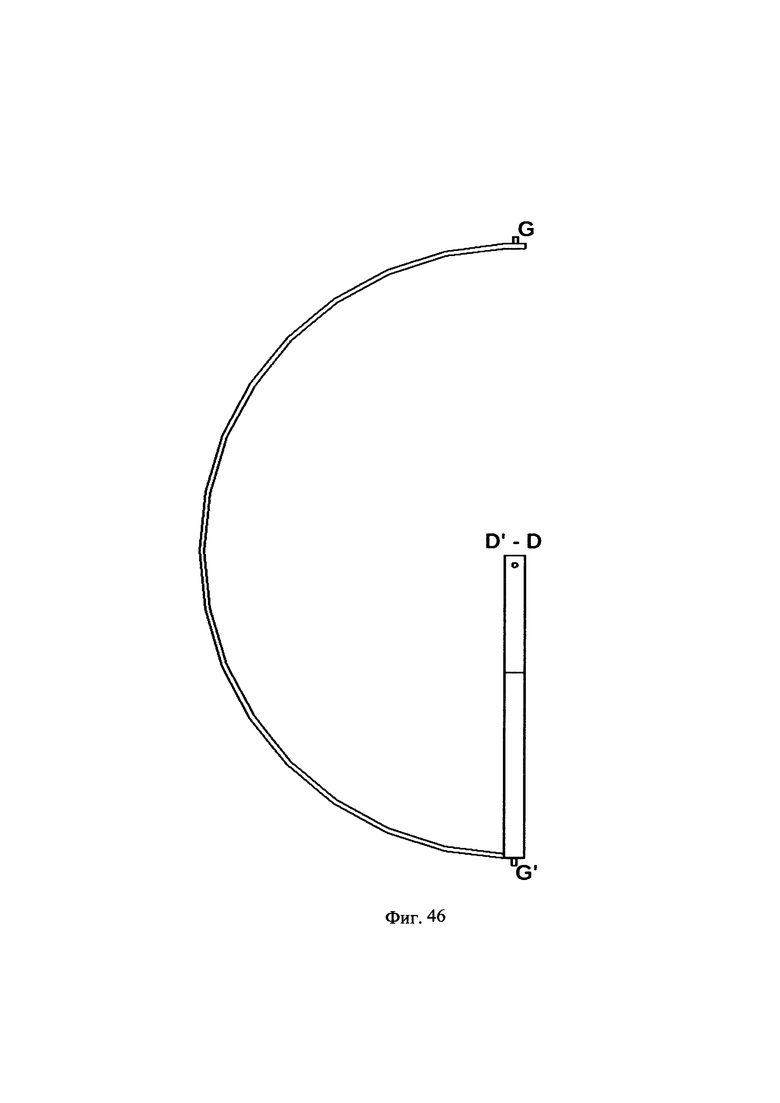
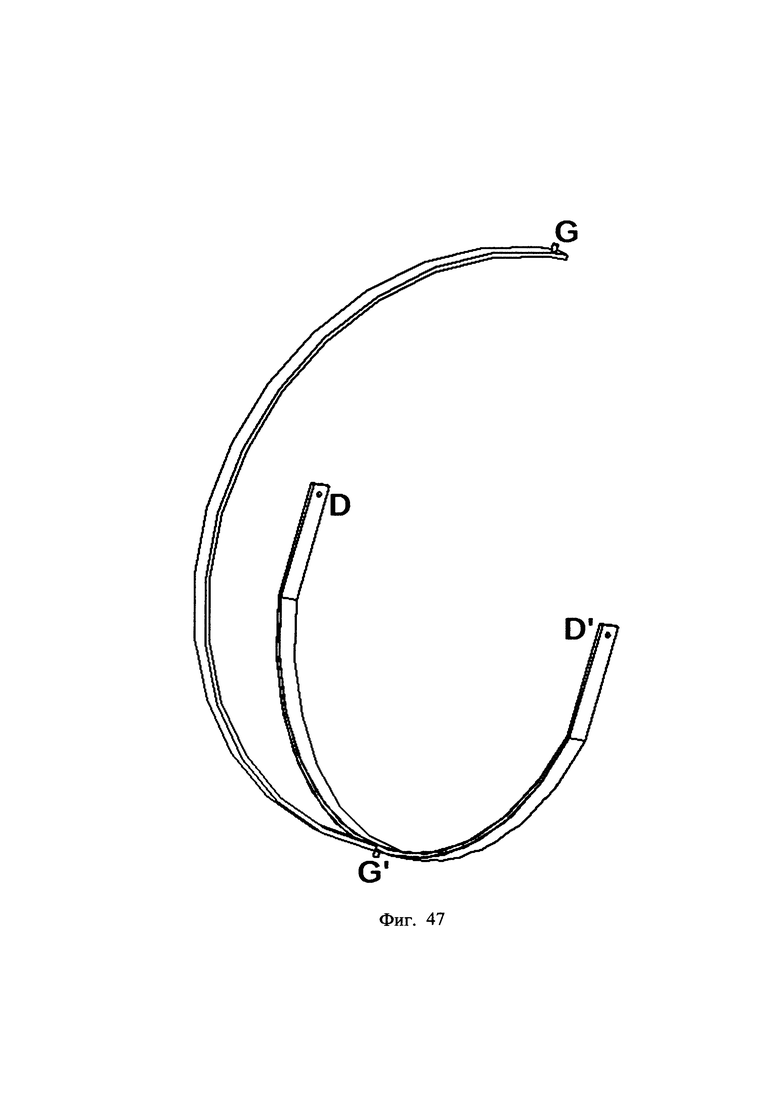
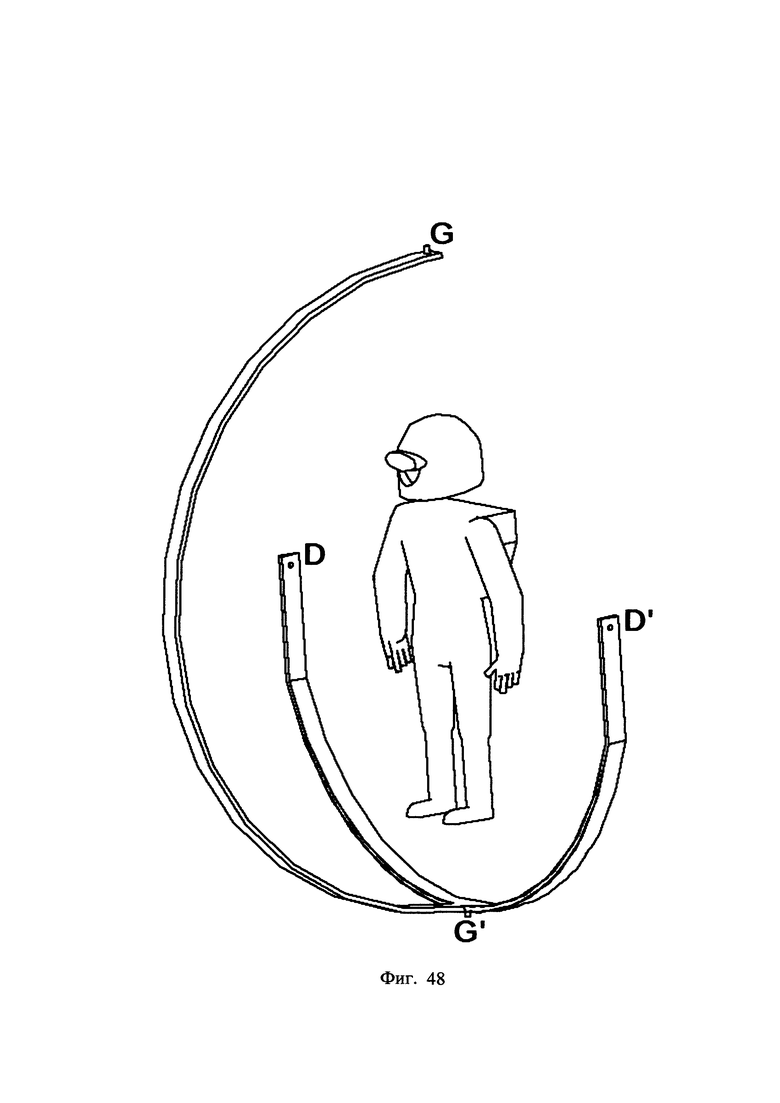
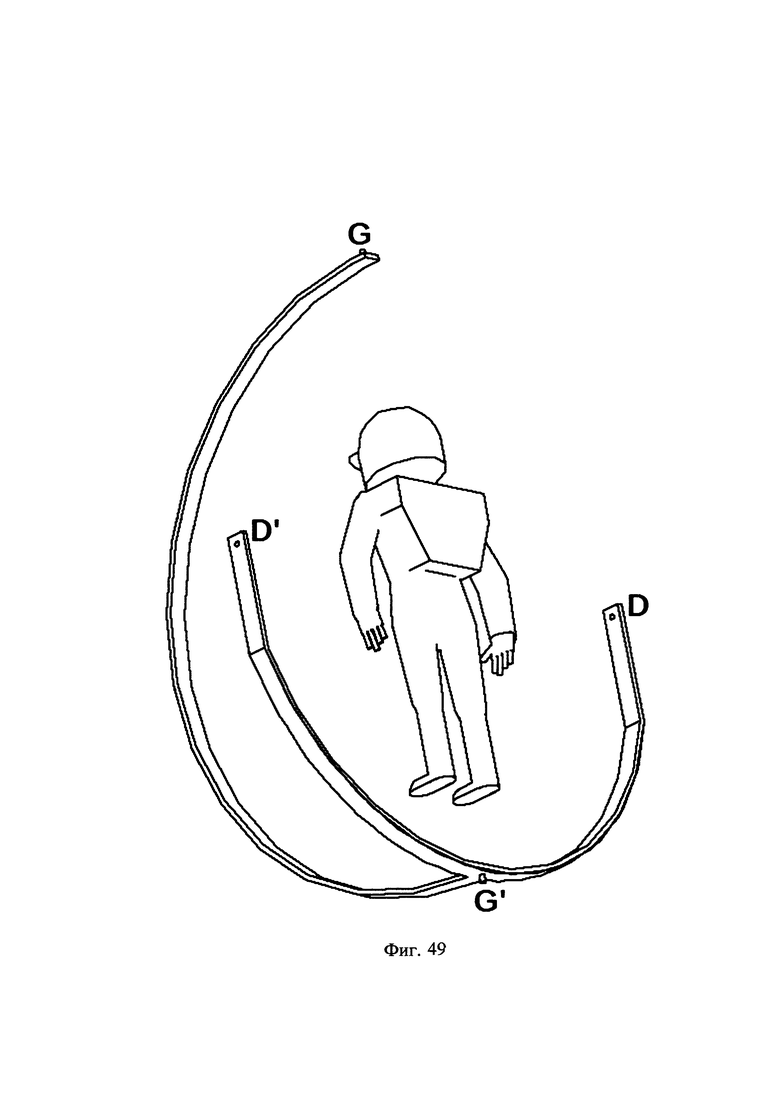
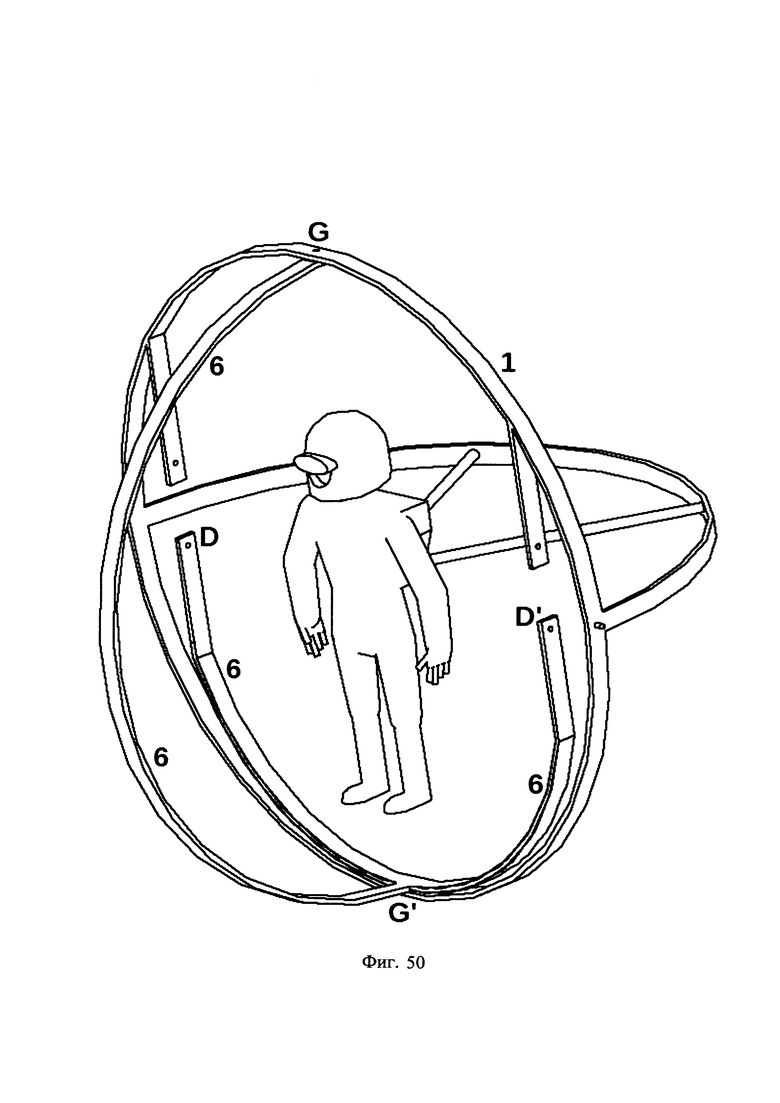
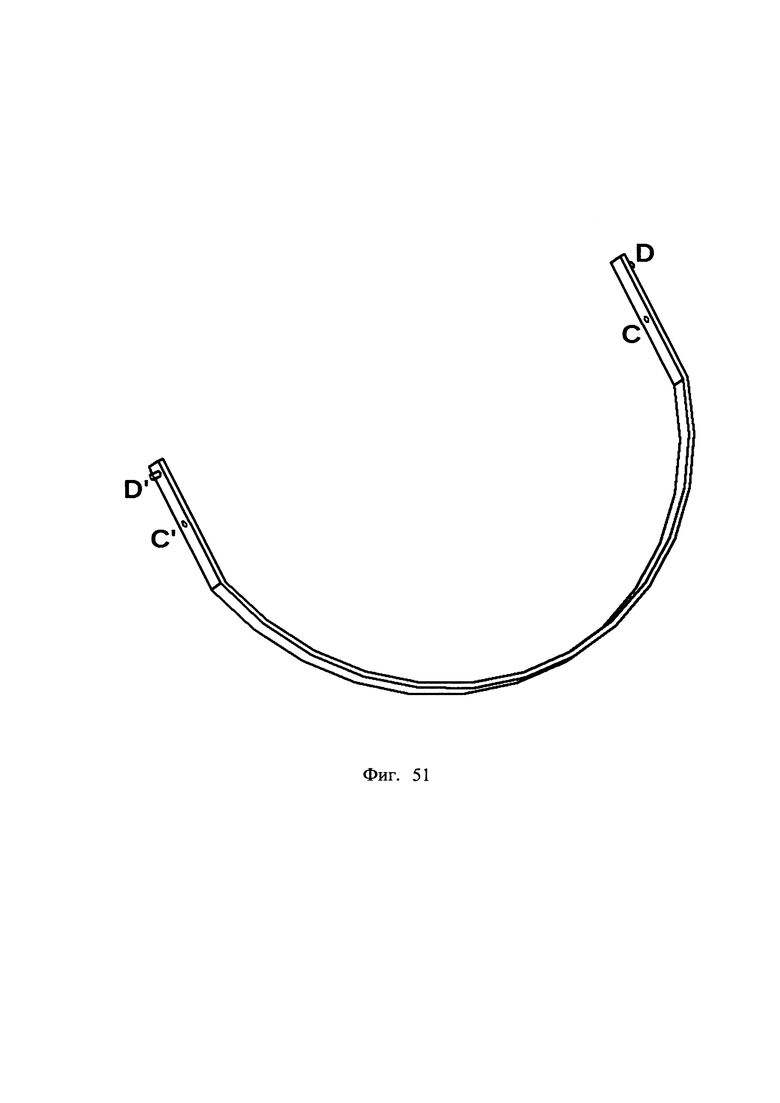
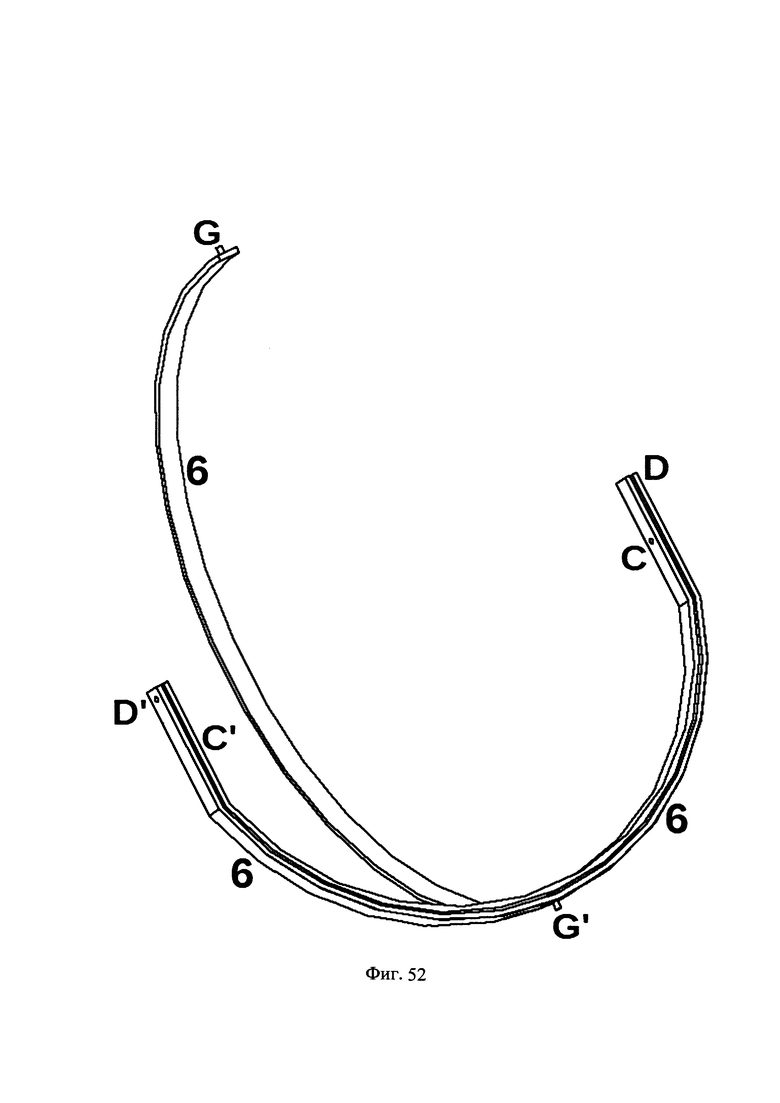
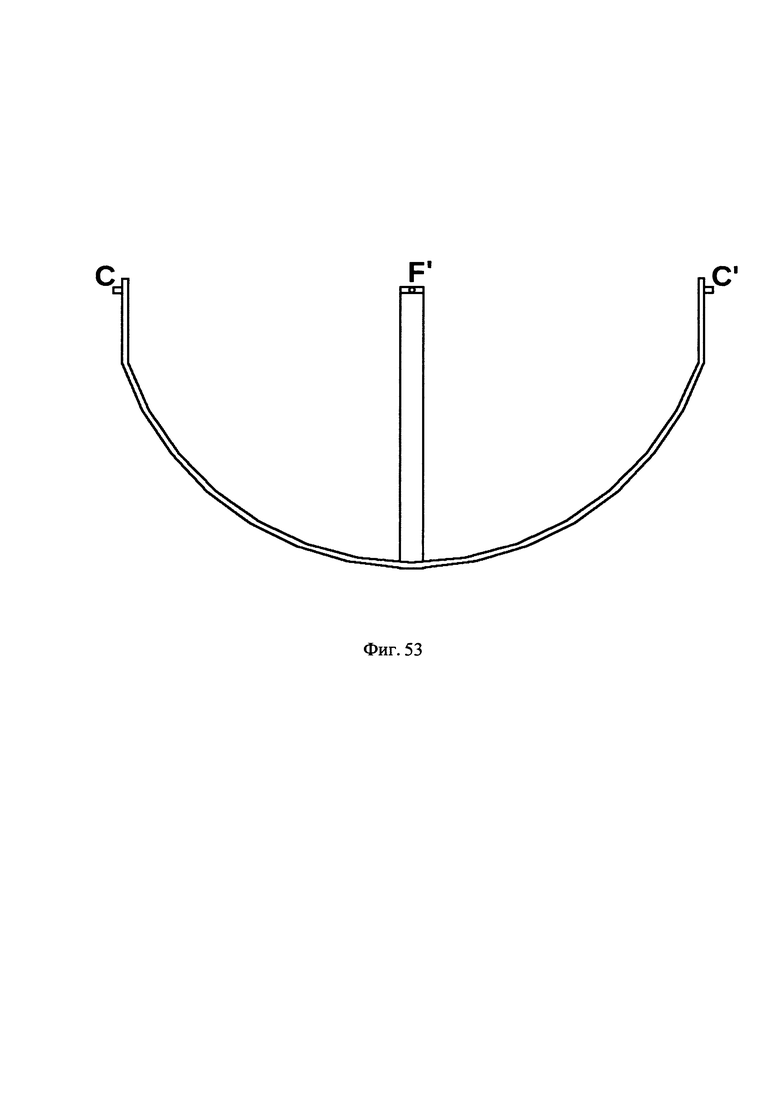
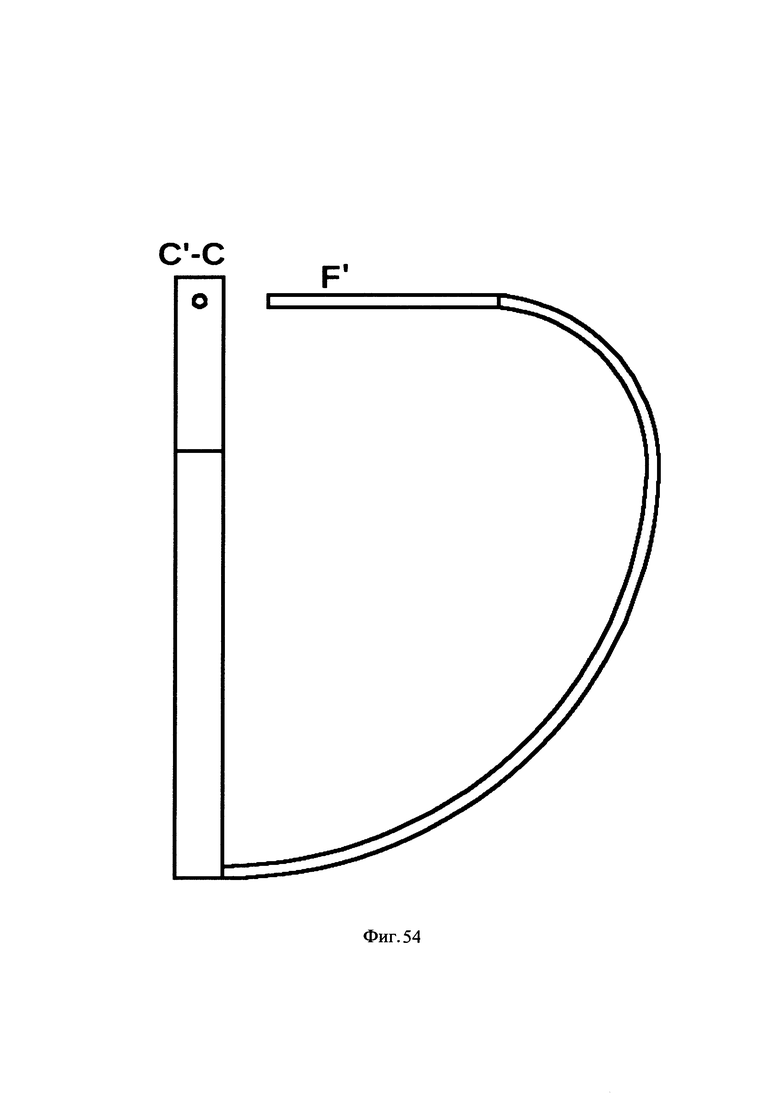
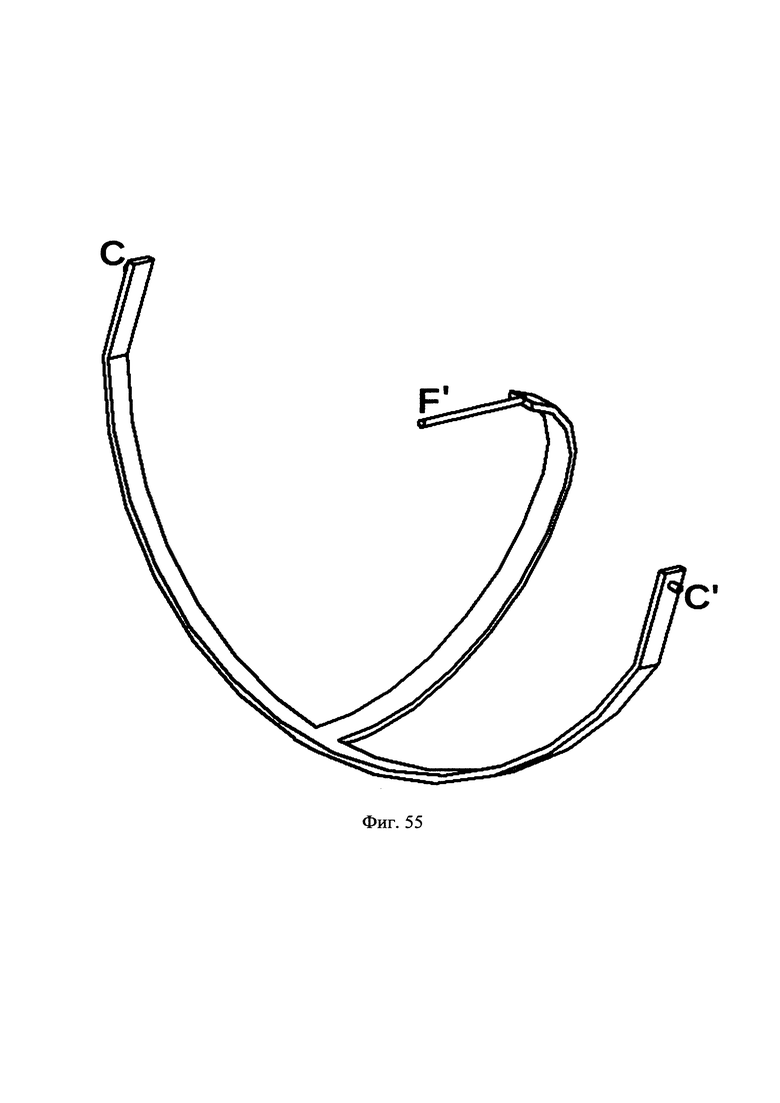
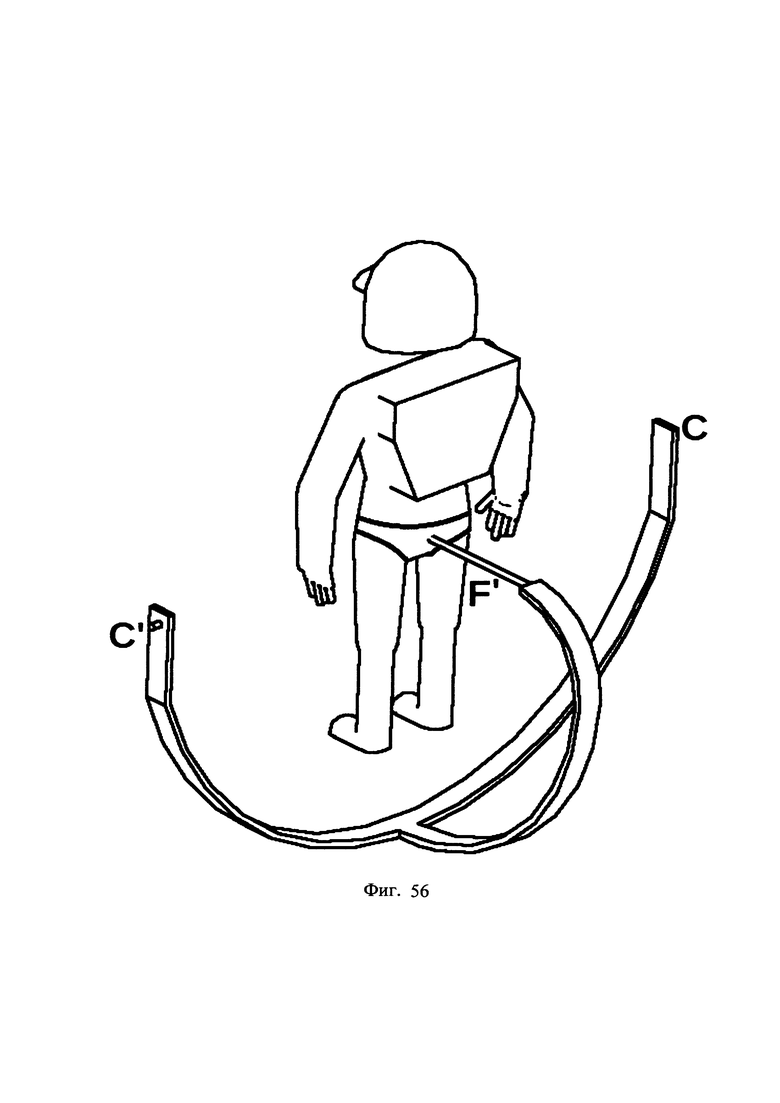
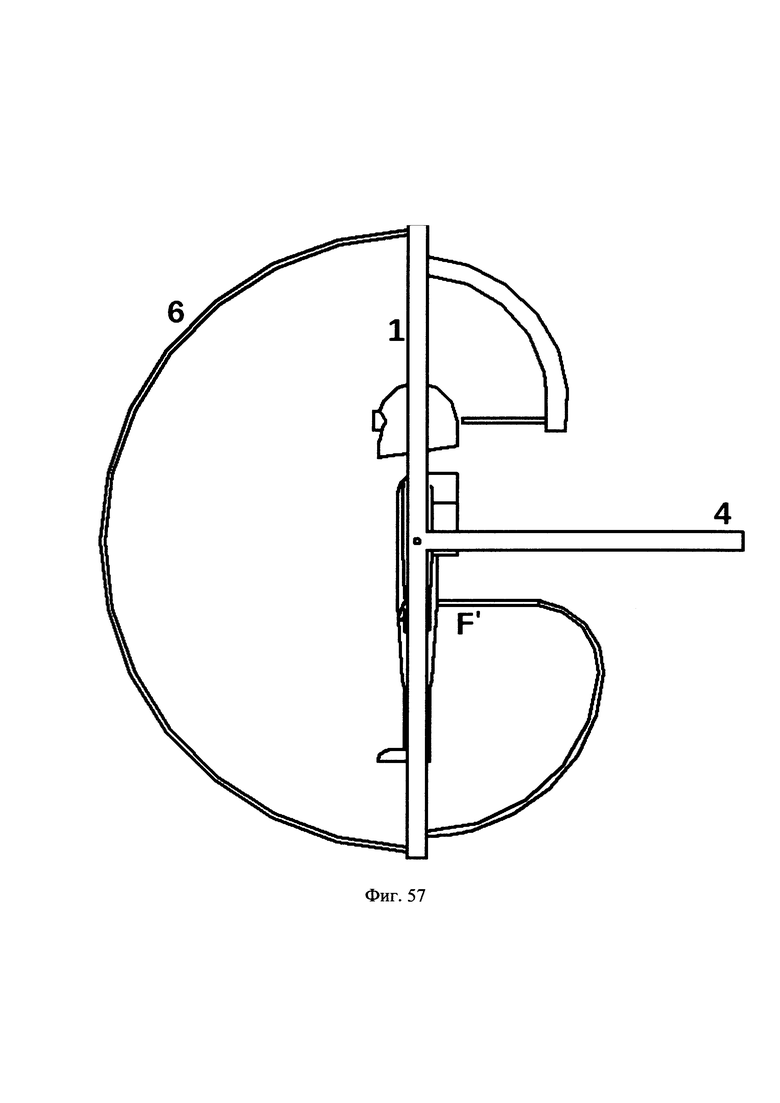
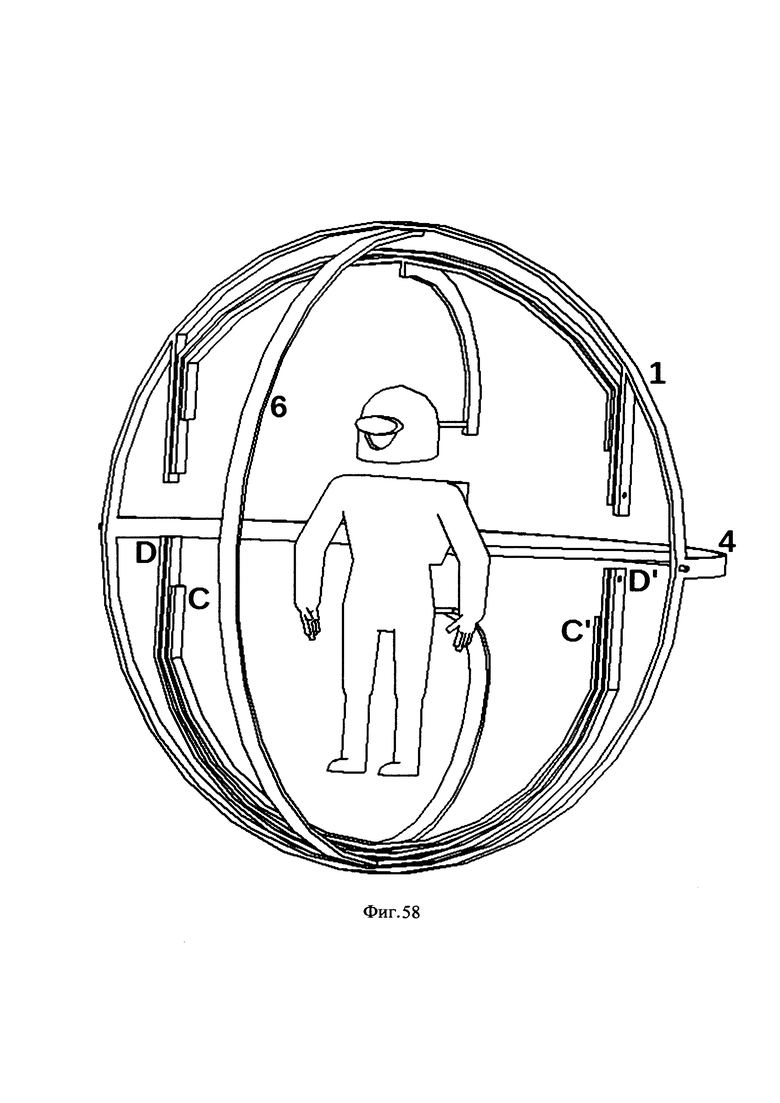

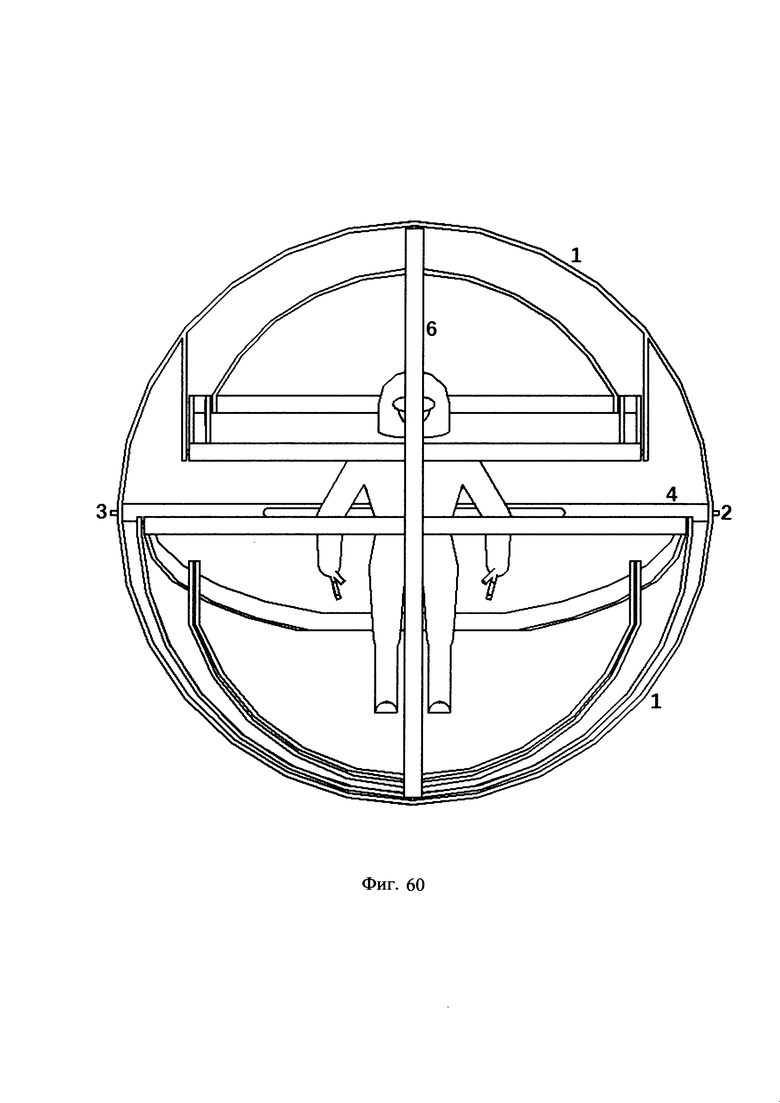

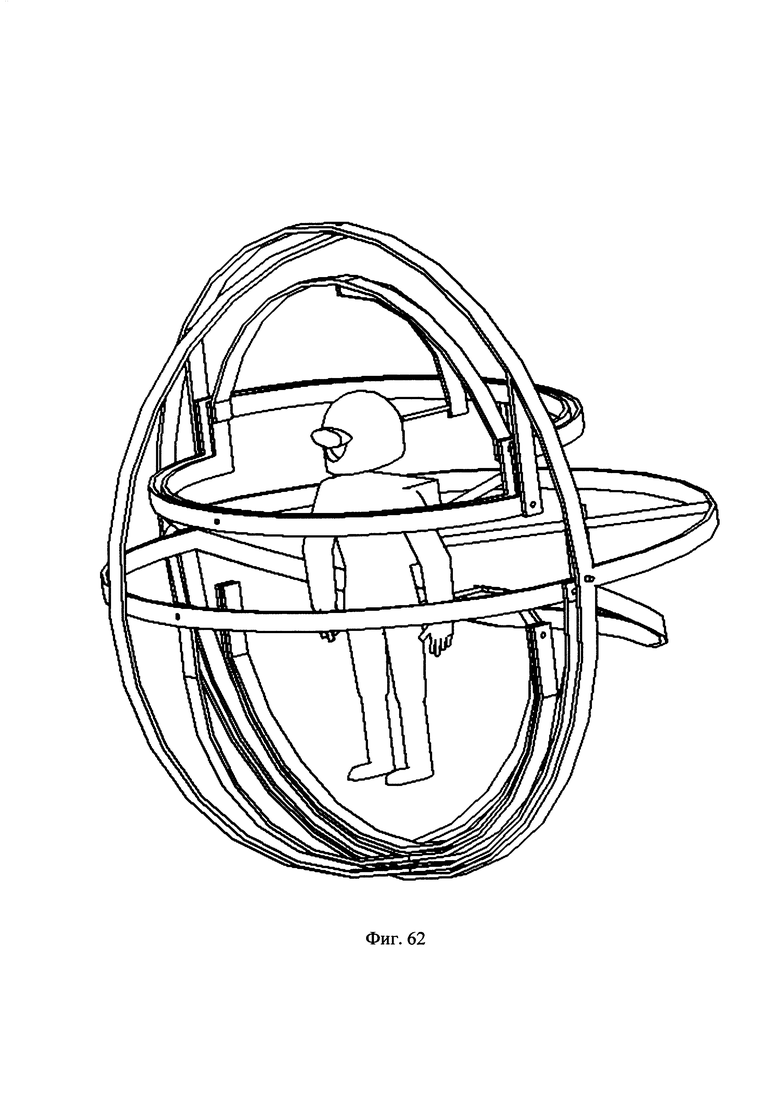
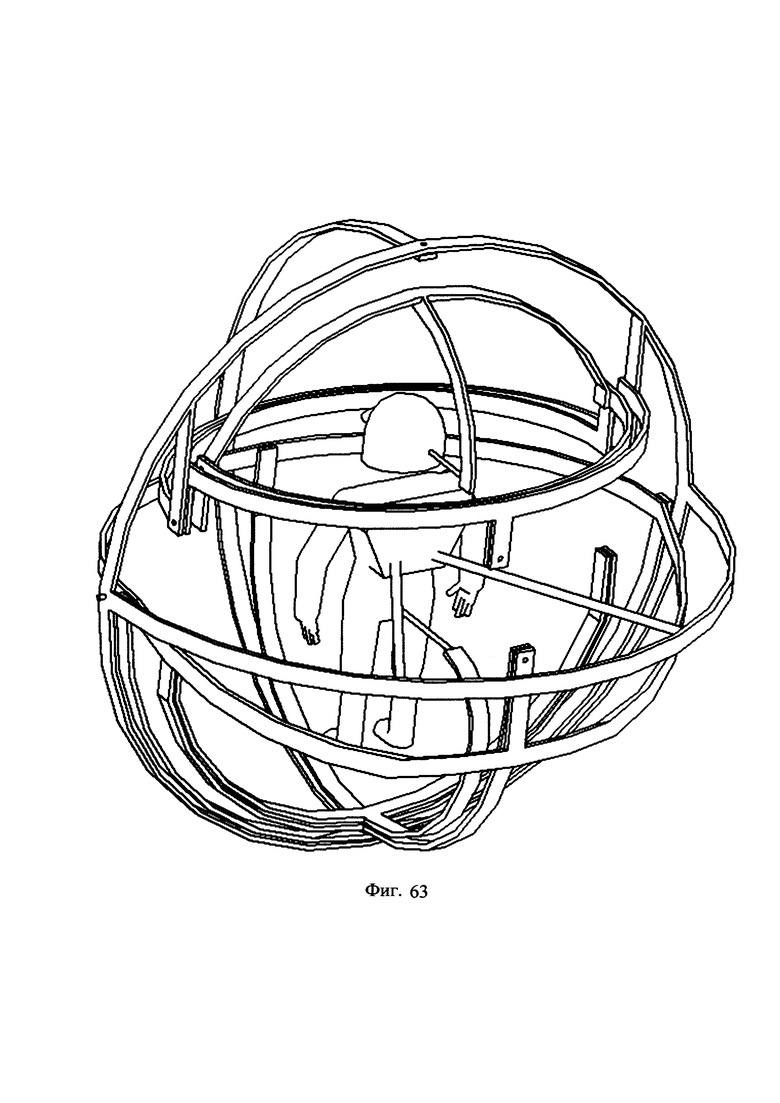

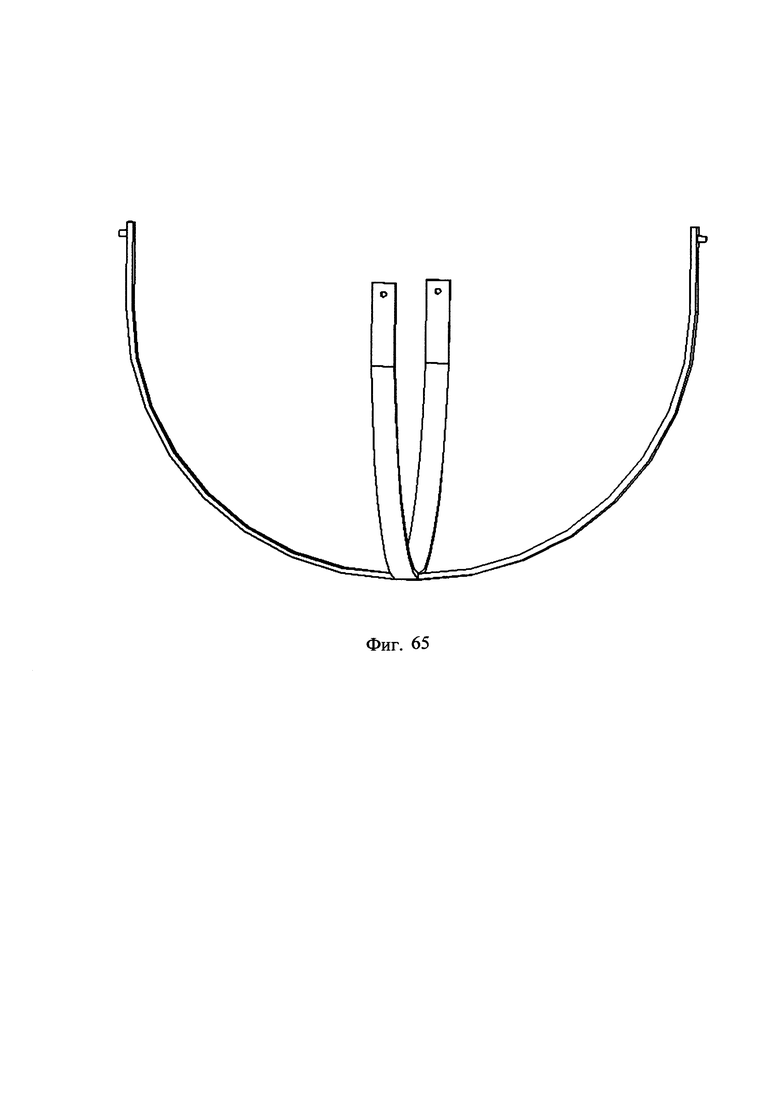
Изобретение относится к области робототехники и может быть использовано, например, в спасательных операциях, космической индустрии, водолазном деле и т.д. Способ принудительной угловой ориентации головы и таза человека-оператора в механизме подвеса, применяемого для дистанционного управления антропоморфным роботом, включает создание единой подвижной системы, связывающей глобальный механизм подвеса, ответственный за пространственную угловую ориентацию всего тела человека-оператора, и жесткие элементы экзоскелета: голову и таз. В результате обеспечивается улучшение качества управления дистанционным антропоморфным копирующим роботом. 65 ил.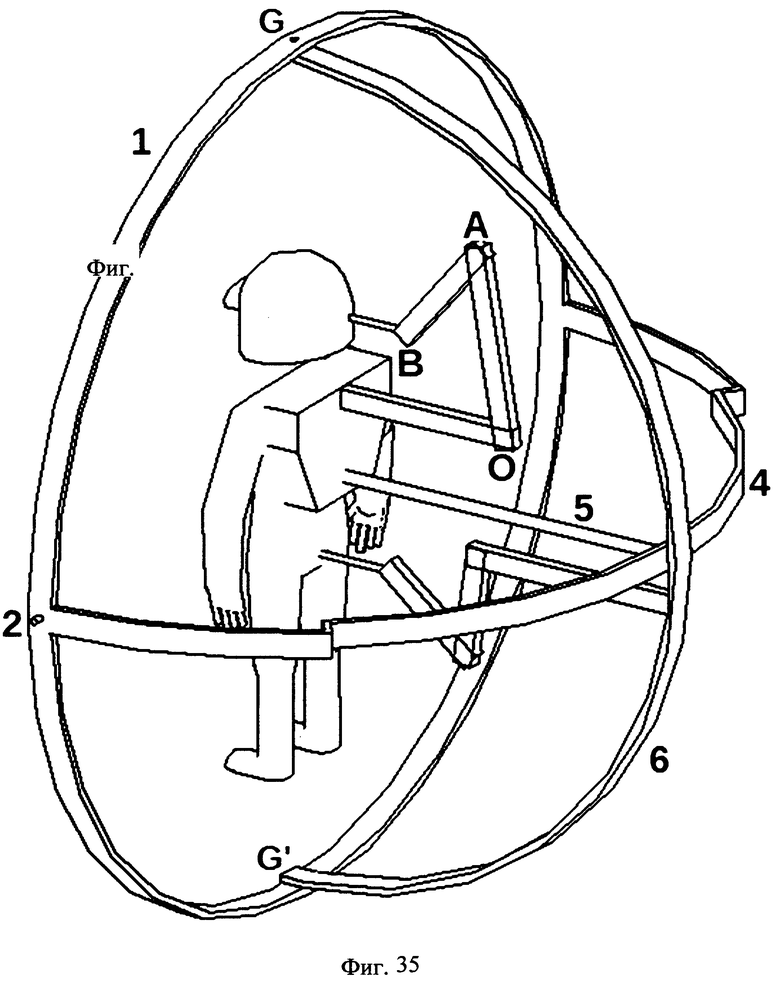
Способ принудительной угловой ориентации головы и таза человека-оператора в механизме подвеса, применяемого для дистанционного управления антропоморфным роботом, характеризующийся тем, что используют механизм подвеса, задающий общую ориентацию тела человека-оператора, экзоскелет, содержащий жесткий шлем и жесткие трусы, при этом плоскость внутреннего кольца механизм подвеса человека-оператора параллельна вертикальной оси тела человека-оператора, а оси-выступы, относительно которых происходит вращение внутреннего жесткого кольца механизма подвеса, расположены слева и справа от тела человека-оператора, жесткий шлем, надеваемый на голову человека, имеет устройства отображения визуальной и аудио обстановки окружающей робота, а внутри жесткого шлема располагают систему датчиков, позволяющих определять направление и величину сил, оказываемых головой человека на внутреннюю поверхность жесткого шлема, что дает возможность электронике выполнять вычисления и придавать нужную пространственную ориентацию жесткому шлему, а вместе с ним и голове человека-оператора, относительно грудного отдела человека посредством манипулятора, берущим начало на ранце экзоскелета за спиной человека и заканчивающегося на макушке жесткого шлема, при этом кинематические схемы силовых элементов манипулятора, поддерживающих жесткий шлем и шею робота геометрически подобны - построены так, что геометрические оси подвижных элементов манипулятора, ответственных за наклоны жесткого шлема относительно грудного отдела экзоскелета, и геометрические оси механических приводов, ответственные за наклоны головы робота относительно торса робота, расположены ближе к грудному отделу экзоскелета и торсу робота, а начало геометрических осей, ответственных за повороты жесткого шлема вокруг его вертикальной оси или головы робота вокруг ее вертикальной оси, находится дальше от грудного отдела экзоскелета и от торса робота, причем в жестких трусах экзоскелета используют систему датчиков, позволяющую определять направление и значение сил, оказываемых тазом человека-оператора на внутреннюю поверхность жестких трусов экзоскелета, что позволяет электронике выполнять вычисления и управлять силовыми приводами манипулятора, задающего угловую ориентацию жестких трусов экзоскелета и соответственно таза человека-оператора относительно грудного отдела экзоскелета посредством манипулятора, берущим начало за спиной у человека-оператора на дуге, выполненной с возможностью принудительного вращения относительно внутреннего кольца механизма подвеса тела человека-оператора вокруг вертикальной оси грудного отдела экзоскелета, и заканчивающегося в районе копчика на жестких трусах экзоскелета, надетого на человека-оператора, при этом кинематические схемы силовых элементов манипулятора жестких трусов экзоскелета и привода в движение таза робота, построены геометрически подобно, таким образом, что начала геометрических осей, ответственных за повороты таза человека и таза робота вокруг вертикальных осей грудного отдела экзоскелета и торса робота, находятся ближе к грудному отделу и к торсу робота, по сравнению с геометрическими осями подвижных элементов, ответственных за наклон таза человека и таза робота относительно грудного отдела и торса робота, при этом для фиксации человека в механизме подвеса тела человека-оператора перпендикулярно плоскости внутреннего кольца механизма подвеса за спиной у человека-оператора проходит жесткая дуга, берущая начало на осях-выступах внутреннего кольца механизма подвеса, из центра этой дуги выходит жесткий стержень, на котором человек-оператор подвешен за спину, при этом для лучшей фиксации жесткого шлема и жестких трусов экзоскелета на теле человека-оператора в жестком шлеме и в жестких трусах между жесткими элементами конструкции и телом человека-оператора используют раздувающиеся пневматические герметичные элементы, а для терморегуляции между телом человека-оператора и раздувающимися герметичными элементами помещают волокнистый слой, через который прокачивают воздух контролируемой температуры, причем в жестком шлеме используют нейроинтерфейс.
| СПОСОБ ДИСТАНЦИОННОГО УПРАВЛЕНИЯ АНТРОПОМОРФНЫМ ШАГАЮЩИМ КОПИРУЮЩИМ РОБОТОМ | 1997 |
|
RU2134193C1 |
| Задающее устройство для дистанционного управления роботом - манипулятором | 1991 |
|
SU1825730A1 |
| US 3535711 A1, 27.10.1970 | |||
| УСТРОЙСТВО И СПОСОБ ЗАЩИТЫ КОМПРЕССОРА И ОХЛАДИТЕЛЯ ВОЗДУХА ТУРБОНАДДУВА В ДВИГАТЕЛЕ ВНУТРЕННЕГО СГОРАНИЯ, ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ И УСТРОЙСТВО УПРАВЛЕНИЯ | 2010 |
|
RU2555091C2 |

