Изобретение относится к авиационной технике, в частности к способам контроля параметров деятельности летчика, и предназначено для совершенствования летной подготовки, включая задачи оценки области инженерно-психологической адекватности моделирования полета на тренажерах и на борту высокоавтоматизированных летательных аппаратов (ЛА) с реконфигурируемой системой управления.
Актуальной научно-методической проблемой разработки средств подготовки летного состава является объективная оценка инженерно-психологической подобия разрабатываемого средства целевому объекту управления, обеспечивающего положительный перенос получаемых навыков управления с технического средства подготовки на целевой объект управления. Под положительным переносом навыков управления подразумевается эффект более успешного выполнения задачи управления на целевом летательном аппарате при наличии тренировок на оцениваемом техническом средстве по сравнению с ситуацией отсутствия тренировок. Соответственно, отрицательный перенос навыков характеризуется ухудшением деятельности на целевом ЛА после подготовки на тренировочном средстве. В настоящее время для оценки психологического (инженерно-психологического) подобия поведения объектов управления, обеспечивающего адекватность навыков, приобретаемых во время тренировки, применяются в основном субъективные (экспертные) методы.
Известны количественные критерии и методы оценки соответствия математической модели реальному объекту, а также требования к физическому моделированию акустических, визуальных, вибрационных, акселерационных сигналов, применение которых прогноза положительного переноса навыков не обеспечивает (ИКАО, Doc 9625, «Руководство по критериям квалификационной оценки тренажерных устройств имитации полета», Том I, Самолеты, Издание третье, 2009; ФАП "Требования к тренажерным устройствам имитации полета, применяемым в целях подготовки и контроля профессиональных навыков членов летных экипажей гражданских воздушных судов", 2012, Приложения 1 и 2; «Разработка требований к исходным данным для проектирования и испытаний авиационного тренажера», В. Л. Суханов, В. М. Шибаев, Н. М. Бирюков, Г.Н. Фаворова, И.Н. Ер-кин, К. В. Егоров/ сб. Труды ЦАГИ 2702, Методические основы квалификационной оценки авиационных тренажеров. - ЦАГИ, 2011).
Известен способ оценки адекватности моделирования полета на подвижном тренажере по параметрам ошибки управления (error fidelity). Оценка основана на допущении, что управляющие действия летчика (pilot control behavior) отражают пилотажные характеристики летательного аппарата (Zaal, Р. М. Т., «Pilot Control Behavior Discrepancies Between Real and Simulated Flight Caused by Limited Motion Stimuli», 2011, PhD thesis, Delft University of Technology, Faculty of Aerospace Engineering. Pool, D.M.; «Objective Evaluation of Flight Simulator Motion Cueing Fidelity Through a Cybernetic Approach», 2012, PhD thesis, Delft University of Technology, The Netherlands). Данный метод применяется к задачам однопараметрического слежения - компенсаторного слежения в канале крена, преследующего слежения в канале тангажа при полете по глиссаде. Деятельность по слежению описывается квазилинейной моделью пилота, состоящей из входа, выхода и ошибки (ремнанты), в которую входят все нелинейные компоненты управляющего сигнала. В инженерно-психологическом плане, согласно приведенным в работе экспериментам, контроль ошибки управления позволяет выявлять оптимальные условия адаптации летчика к поведению объекта управления; так, негативным фактором, снижающим адаптивные возможности пилота, является расхождение между результатами моделирования приборной информации и акселерационными сигналами, поступающими от подвижного тренажера. В частности, оценивается влияние на величину ошибки слежения различных «фильтров», с помощью которых физически моделируется движение ЛА на подвижном тренажере. Наряду с погрешностью моделирования факторами, ухудшающими качество выполнения задачи слежения, являются неоптимальные пилотажные характеристики объекта управления, что дает основание авторам рассматриваемой методики предлагать данный подход в качестве объективного варианта шкалы оценки пилотажных характеристик Купера - Харпера. По величине ошибки слежения оцениваются оптимальные условия адаптации летчика к поведению объекта управления безотносительно к вопросу о соответствии условий полунатурного моделирования и реального полета. Это основной недостаток указанного метода.
Известен способ определения подобия летательного аппарата и авиационного тренажера, заключающийся в записи действий летчика на реальном ЛА, считывании их в вычислитель авиационного тренажера и моделировании полета на тренажере в соответствии с этими сигналами путем переадресовки потока входных данных моделирующих систем динамики полета с рычагов управления тренажером на базу данных сигналов управляющих воздействий летчика на ЛА из реального полета (В.А. Палей, «Способ определения подобия летательного аппарата и авиационного тренажера», заявка на изобретение №94037001 от 04.10.1994, опубликовано 10.08.1996; заявка на изобретение №94037229 от 4.10.1994. опубликовано 27.09.1996). Первый способ использования данных реального полета для оценки тренажера, указанный в заявке №94037001, предполагает оптимизацию получения контрольного образца реакций математической модели тренажера для сравнения с эталонным образцом реакций ЛА, зарегистрированным в реальном полете, так как входные сигналы для математической модели и реального объекта управления полностью идентичны. Недостатком данного способа является отсутствие критериев оценки расхождения динамики моделируемого объекта управления и математической модели с точки зрения адекватности приобретаемых летчиком навыков управления. Второй способ использования записей реального полета для оценки тренажера включает считывание в вычислитель тренажера записи сигналов параметров маневрирования реального ЛА и моделирование его угловых и пространственных перемещений с соответствующим отображением на индикаторе визуальной обстановки тренажера в качестве ведущего самолета при имитации полета парой. Летчик управляет тренажером, имитирующим ведомый самолет в полете парой, выполняя эволюции и маневры, повторяющие эволюции и маневры изображения ведомого ЛА на индикаторе визуальной обстановки. Далее идет сравнение управляющих действий летчика в полете и на тренажере. Недостатком данного способа является, прежде всего, отсутствие подобия тестовых задач управления, решаемых летчиком в полете и на тренажере, что будет влиять на характер управляющих действий наряду с оцениваемыми отличиями реального ЛА и тренажера. В то же время, данный способ не содержит указаний на методы сравнения и критерии оценки подобия действий летчика с точки зрения адекватности навыков.
Известен метод сравнения информационной модели полета в реальных условиях и при полунатурном моделировании, заключающийся в сопоставлении среднего времени фиксации взгляда летчика на приборах. Данный способ позволяет выявить различия в психологической регуляции действий летчика при наличии и отсутствии моделирования неинструментальных сигналов поведения самолета (Зацарный Н.Н., «К проблеме психического образа в авиационной психологии», «Космическая биология и авиакосмическая медицина», 1991, №3, с. 4-7).
Основным недостатком данного метода является отсутствие возможности сравнивать объекты, сходные между собой по признаку типа информационной модели полета - неиструментальной или инструментальной (приборной), например, если сравниваются два самолета, два тренажера, самолет и подвижный тренажер.
В качестве прототипа выбран способ оценивания качества пилотирования летчиком по данным штатного бортового устройства регистрации, сущность которого заключается в том, что отклонения ручки управления самолетом разделяются с помощью КИХ-фильтра (КИХ- конечная импульсная характеристика), настроенного на собственную частоту маневренного самолета (0,5 Гц), на низкочастотную составляющую («концептуальную модель») и высокочастотную составляющую («исполнительную модель»). (Полуэктов Сергей Павлович, Кашковский Виктор Владимирович, Тихий Иван Иванович, Лапин Иван Петрович, «Способ оценивания качества пилотирования самолета летчиком на этапе посадки по данным штатного бортового устройства регистрации», патент RU 2436164, приоритет от 01.10.2010).
Под концептуальной моделью авторами понимается «концепция движения воздушного судна, мысленное представление о траектории движения», которая будет реализована летчиком при управлении самолетом. Низкочастотная составляющая (тренд) управляющего сигнала, таким образом, характеризует траекторное управление самолетом. Высокочастотная составляющая управляющего сигнала отражает нелинейные стохастические процессы перерегулирования при реализации концептуальной модели. Высокочастотная составляющая, также называемая авторами изобретения в теории безопасности полетов «исполнительской моделью летчика», характеризует качество пилотирования самолета.
В качестве критерия оценки пилотирования указана ширина интервала плотности распределения высокочастотной составляющей (ΔL). По данным авторов, манера пилотирования, для которой характерна большая величина данного показателя ΔL, коррелирует с более высоким классом летчика, что позволяет при оценке деятельности летчика обходиться без контроля качества решения задач пилотирования. Ограничение приведенного выше способа анализа отклонения ручки управления самолетом заключается в том, что данный способ направлен на оценку действий летчика и не учитывает особенности объекта управления, что является его ограничением с точки зрения задачи оценивания адекватности моделирования полета и соответствующей адекватности приобретаемых навыков управления.
В целом, известные способы объективного оценивания подобия объектов управления не обеспечивают достоверность оценки инженерно-психологического подобия объектов как технического условия положительного переноса навыков летной деятельности. При этом, для оценки адекватности моделирования полета анализ деятельности летчика применяется на уровне анализа результатов управляющих действий (ошибка управления), в свою очередь, существующие способы анализа управляющих действий летчика с органами управления не решают задачи оценки особенностей объекта управления.
В качестве альтернативы для преодоления вышеуказанных методических ограничений предлагается оценивать инженерно-психологическое подобие объектов управления путем сравнения характеристик взаимодействия «летчик-самолет». При данном подходе особенности объекта управления оцениваются по характеру действий с ним, в частности, подобие структуры деятельности летчика на двух объектах управления показывает подобие данных объектов, обеспечивающее адекватность приобретаемых навыков выполнения задач управления.
Различия в зрительных действиях летчика отражают преимущественно отличия в психической регуляции управляющих действий, зависящие от информационной модели полета (например, от наличия или отсутствия неинструментальных сигналов о реакциях ЛА). Характер перемещений основных рычагов управления отражает преимущественно особенности поведения объекта управления.
Одним из методических приемов оценки инженерно-психологического подобия взаимодействия «летчик-самолет» является сравнительная оценка результатов амплитудно-временной стратификации рабочих действий летчика. Метод амплитудно-временной стратификации действий летчика заключается в построении профиля распределения действий, зарегистрированных на определенном участке полета, по амплитудным, временным, скоростным и т.д. диапазонам.
Влияние индивидуальных особенностей деятельности летчика при проведении инженерно-психологической оценки снимается введением требования выполнения тестовых заданий на оцениваемых объектах управления одним и тем же оператором.
Технический результат, на достижение которого направлено изобретение, заключается в повышении точности оценивания инженерно-психологического подобия объектов управления и, следовательно, повышении достоверности прогноза положительного переноса навыков летчика, например, с базового технического средства подготовки (наземного тренажера, учебного самолета с репрограммируемой системой управления) на целевой летательный аппарат.
Указанный результат достигается тем, что инженерно-психологическое подобие объектов управления, обеспечивающее адекватность приобретаемых летчиком навыков пилотирования при подготовке на учебном самолете с реконфигурируемой системой управления или тренажере, оценивается путем регистрации и анализа характеристик перемещений рычагов управления на целевом летательном аппарате (ЛА), для которого достигается подобие управления, и на оцениваемом объекте управления (учебном самолете, тренажере), подобие которого целевому ЛА обеспечивается. Оценка осуществляется путем выполнения летчиком тестового маневра - набора высоты из горизонтального полета с возвращением в горизонтальный полет - на целевом летательном аппарате, при этом производится запись перемещений рычагов управления на автономный карманный регистратор с автономным измерительным узлом, который устанавливается на рычагах управления и передатчик которого осуществляет передачу измеренных параметров (перемещений рычагов управления) на карманный регистратор по каналу беспроводной связи. Затем тот же летчик (для исключения влияния индивидуального стиля на структуру управляющего действия) выполняет тот же тестовый маневр на оцениваемом объекте управления (учебном самолете, тренажере), при этом также осуществляется регистрация перемещений рычагов управления на автономный карманный регистратор, в базе данных которого содержится эталонная запись перемещения рычагов управления, полученная на целевом летательном аппарате. Далее выполняется оценка подобия целевого ЛА и оцениваемого объекта управления путем выделения границ рабочих движений летчика рычагом «от себя», «на себя» по точкам экстремумов (минимумов, максимумов), определяемых с помощью непрерывного вычисления разности значений перемещения рычага в соседних точках, при этом анализируются значения параметра (положения рычага управления) в трех соседних точках, границы действий выделяются по средней точке (второй точке из трех) при условии, что разность значений параметра в третьей и второй точках меняет знак по сравнению с разностью значений параметра во второй и первой точках; определяются амплитуды выявленных рабочих движений рычагом, после чего рабочие движения летчика распределяются по заданным амплитудным диапазонам. По окончании тестового режима оценивается мощность каждого из амплитудных диапазонов относительно общего числа действий летчика, зарегистрированных в процессе выполнения тестового режима; формируется профиль мощности амплитудных диапазонов рабочих движений летчика для целевого ЛА и оцениваемого объекта управления в графической форме в виде профиля распределения действий по диапазонам (амплитудным, скоростным, временным). Оценка подобия профилей распределения действий летчика по амплитудным диапазонам производится на основании попарной оценки коэффициентов мощности соответствующих амплитудных диапазонов рабочих движений летчика (для эталонного и оцениваемого объектов управления); по результатам сравнения профилей распределения действий летчика на целевом и оцениваемом объектах управления принимается решение об инженерно-психологическом подобии сравниваемых объектов: при полном подобии коэффициентов мощности амплитудных диапазонов действий летчика отмечается полное инженерно-психологическое подобие сравниваемых объектов на уровне амплитудных диапазонов, для уточнения прогноза положительного переноса навыков, приобретаемых на оцениваемом объекте управления, далее сравниваются профили распределения действий летчика по временным и скоростным диапазонам; при сохранении общего профиля распределения действий летчика с уменьшением/увеличением значения коэффициента мощности амплитудного диапазона отмечается относительное инженерно-психологическое подобие сравниваемых объектов, требующее дополнительной тренировки при переходе на целевой ЛА, причем прогноз положительного переноса навыков также уточняется на уровне подобия профилей распределения действий летчика по временным и скоростным диапазонам; при изменении общего профиля распределения действий по амплитудным диапазонам с переменой максимума на минимум или минимума на максимум отмечается наименьшее инженерно-психологическое подобие оцениваемого и целевого объектов управления, и делается вывод о необходимости переделки навыков выполнения задач управления для освоения целевого летательного аппарата.
Описание чертежей.
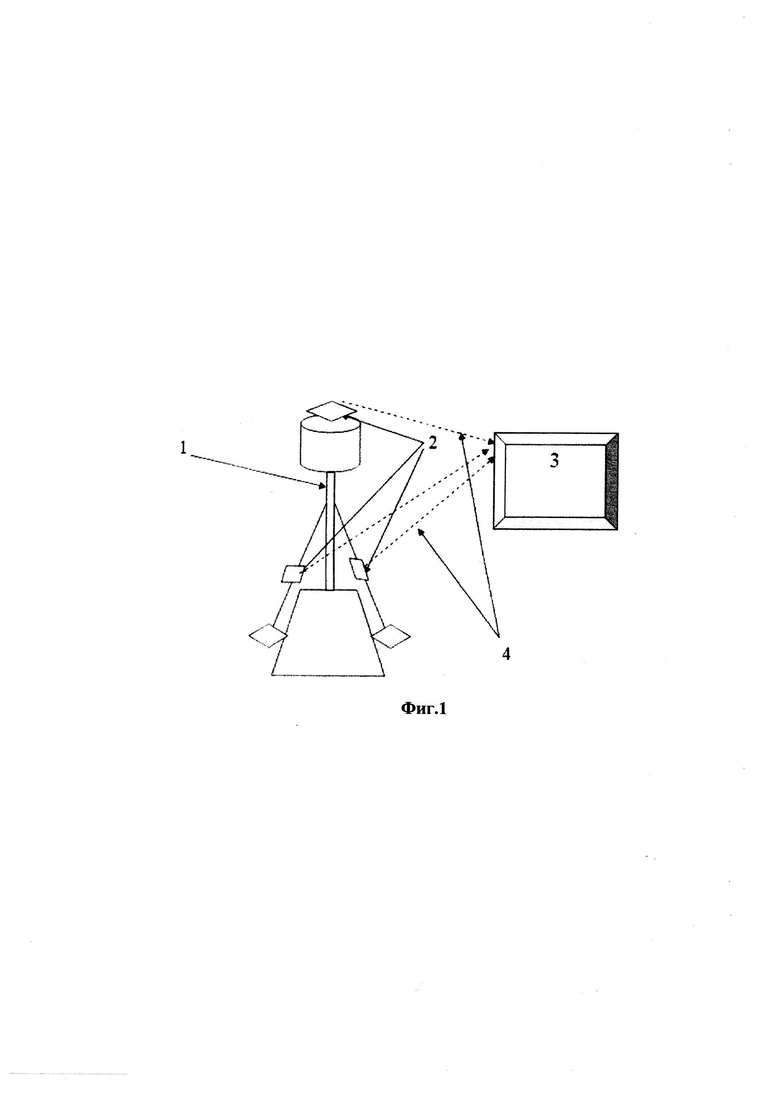
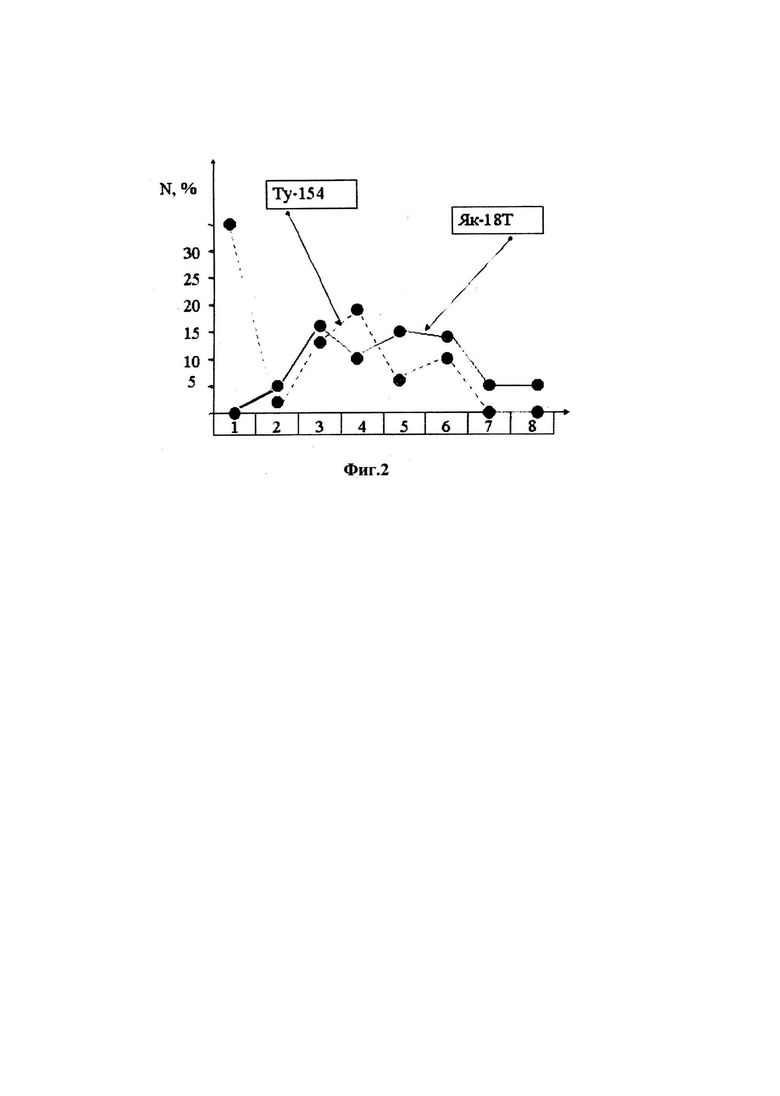
Сущность предлагаемого способа оценки подобия объектов управления проиллюстрирована с помощью фиг. 1, где представлена схема регистрации действий летчика на автономный карманный регистратор (вариант с автономными беспроводными измерительными узлами), а также фиг. 2 с примером сопоставления профилей распределения движений рычага управления самолетом по тангажу (тестовый маневр - набор высоты 150 м) для легкого и тяжелого самолета, которые выводятся на дисплей автономного карманного регистратора действий летчика для экспресс-анализа в полете.
Регистрация управляющих действий летчика может быть реализована с помощью биоизмерительного костюма, автономно регистрирующего всю двигательную активность летчика в кабине ЛА (патент RU 2537050 от 27.12.2014 г., «Система биомеханического контроля деятельности летчика в полете», Меликова М.Б., Арбузова Н.В., Погорелов А.К.).
Другим вариантом реализации регистрации действий летчика, служащих исходными данными для инженерно-психологической оценки подобия объектов управления, может быть измерение перемещения рычагов управления в кабине ЛА с помощью схемы регистрации действий летчика, отраженной на фиг. 1.
На схеме регистрации действий летчика (фиг. 1) изображены: 1- рычаг управления самолетом, перемещения которого измеряются с помощью двух автономных измерительных узлов на базе микроконтроллера, включающих передатчик, автономный элемент питания, таймер (для синхронизации с другими записывающими устройствами); 3 - центральный блок приема, автоматизированной обработки и отображения данных о перемещении рычагов управления, включающий: блок микропроцессора, блок памяти, содержащий базу данных по действиям летчика на других объектах управления, блок приемника данных, связанный с автономными измерительными узлами беспроводной связью 4, панель управления режимами записи, обработки и отображений, с отметчиком явлений.
Принцип измерения перемещения рычага для данного изобретения не существенен; перемещение рычагов управления может оцениваться на основании показаний группы акселерометров и гироскопов; показаний группы тензометрических датчиков, угломерных датчиков и т.д.
Способ осуществляется следующим образом.
1 шаг. На борту целевого объекта управления на рычаге управления устанавливается измерительный узел автономного карманного регистратора действий летчика (фиг. 1), производится калибровка датчика по максимальным отклонениям рычага управления, данные калибровки заносятся в память устройства.
2 шаг. В полете на целевом ЛА летчик выполняет тестовое задание, включающее три режима набора высоты по 200 м с выходом в горизонтальный полет между режимами. Начало и завершение участков набора высоты фиксируется отметчиком явлений. Эталонная запись перемещения рычага управления по тангажу заносится в память устройства.
3 шаг. В полете на оцениваемом объекте управления тот же летчик (для исключения влияния индивидуального стиля пилотирования на результаты анализа) выполняет тестовое задание (три режима набора высоты по 200 м с выходом в горизонтальный полет между режимами).
4 шаг. В соответствии с последовательностью анализа данных, заложенной в автономном карманном регистраторе действий летчика, производится структурный анализ деятельности летчика на целевом и оцениваемом объектах управления.
Анализ эталонной записи движения рычага управления по тангажу на целевом ЛА выполняется в следующей последовательности:
1. Выделяются границы управляющих действий. Принцип выделения состоит в разделении действий «от себя» и «на себя», а также «полочек» (задержка рычага управления в одном положении длительностью более 1,5-2 сек). Возвратно-поступательные рабочие действия выделяются по точкам экстремумов (минимумов, максимумов), определяемым с помощью непрерывного вычисления разности значений перемещения рычага в соседних точках по трем соседним точкам при условии, если разность значений параметра в третьей и второй точках меняет знак по сравнению с разностью значений параметра во второй и первой точках. Ступенчатое отклонение рычага, разделенное на несколько частей небольшими участками фиксации рычага (около 1 сек), рассматривается как соответствующее количество рабочих движений.
2. Определяется амплитуда действий по разности значений амплитуды в соседних точках экстремумов (между максимумом и минимумом, между минимумом и максимумом). За порог анализируемой амплитуды действия принимается 4 мм.
3. Выделенные действия распределяются по амплитудным диапазонам. По умолчанию заданы следующие амплитудные диапазоны действий летчика:
нулевой (в него входят «полочки»), первый (от 4 мм до 10% хода рычага), второй (10-15% хода), третий (15-25% хода), четвертый (25-35% хода), пятый (35-50% хода). В процессе анализа эталонной записи перемещения рычага управления по тангажу возможен подбор деления на амплитудные диапазоны, наиболее четко выявляющего особенности пилотирования целевого ЛА.
4. По окончании выполнения тестового маневра определяется общее количество действий и количество действий в каждом из амплитудных диапазонов; оценивается мощность каждого амплитудного диапазона в процентах от общего количества действий на анализируемом участке; результаты заносятся в таблицу.
5. На основе таблицы с данными о распределении действий летчика по амплитудным диапазонам строится профиль распределения действий летчика по амплитудным диапазонам (пример представлен на фиг. 2), где на оси ОХ отмечены амплитудные диапазоны, на оси ОУ представлена мощность диапазона в процентах от общего количества анализируемых действий. Коэффициент мощности амплитудного диапазона, где n - номер амплитудного диапазона, т- номер объекта управления, принимает отрицательные значения (- knm), если на графике ему соответствует минимум, и положительные значения при соответствии максимуму на графике.
6. При сравнении профилей распределения движений летчика в канале тангажа по амплитудным диапазонам для целевого объекта управления (эталон) и для оцениваемого объекта управления возможны три основных варианта соотношения профилей распределения действий летчика:
1 вариант - совпадение профилей (минимумов и максимумов на графике), свидетельствующее о сходной структуре действий летчика в канале тангажа и об инженерно-психологическом подобии сравниваемых объектов управления, определяющих адекватность навыков выполнения задач управления в продольном канале при пилотировании целевого и учебного объекта управления.
2 вариант - сохранение общего профиля распределения действий летчика (последовательности максимумов и минимумов) с изменением мощности амплитудных диапазонов, когда отмечается относительное инженерно-психологическое подобие сравниваемых объектов, требующее дополнительной тренировки при переходе на целевой ЛА, причем прогноз положительного переноса навыков также уточняется на уровне подобия профилей распределения действий летчика по временным и скоростным диапазонам;
3 вариант - изменение минимумов на максимумы или максимумов на минимумы, свидетельствующее об изменении структуры действий летчика и о наименьшем инженерно-психологическом подобии объектов управления, требующем переделки навыков по управлению ЛА.
7. При получении первого или второго вариантов соотношения профилей распределения действий летчика в канале тангажа по амплитудным диапазонам анализ может быть продолжен на уровне временных и скоростных диапазонов.
Предложенный способ инженерно-психологической оценки подобия объектов управления, состоящий в сравнении профилей распределения действий летчика по диапазонам, применим для анализа всех видов рабочих действий летчика (действия рычагом управления самолетом в канале тангажа, крена, действия педалями, действия летчика с рычагом управления двигателем, визуальные действия летчика). Более подробный инженерно-психологический анализ каждого вида рабочих действий летчика предусматривает последовательное сравнение распределения действий по амплитудным, временным, скоростным диапазонам. Анализ действий может быть дополнен определением соответствия матриц вероятности переходов от действия, попадающего в один диапазон, к действию, принадлежащему другому диапазону.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ МОДЕЛИРОВАНИЯ НА ПИЛОТАЖНОМ СТЕНДЕ ПОПАДАНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА В ВИХРЕВОЙ СЛЕД | 2018 |
|
RU2701062C1 |
| УЧЕБНО-ТРЕНИРОВОЧНЫЙ КОМПЛЕКС АВИАЦИОННЫЙ | 2004 |
|
RU2250511C1 |
| СПОСОБ ПИЛОТИРОВАНИЯ ЛА ПО ЗАДАВАЕМОЙ ТРАЕКТОРИИ С ЗАДАВАЕМОЙ СКОРОСТЬЮ | 1997 |
|
RU2129699C1 |
| АВТОМАТИЗИРОВАННАЯ ВЫСОКОИНТЕЛЛЕКТУАЛЬНАЯ СИСТЕМА ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ ПОЛЕТОВ ЛЕТАТЕЛЬНОГО АППАРАТА | 2009 |
|
RU2388663C1 |
| Интегральная система дистанционного обучения пилотированию летательных аппаратов, комплексных испытаний и видеоконференцсвязи | 2018 |
|
RU2703325C1 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ ПОЛЕТОВ ПИЛОТИРУЕМОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2008 |
|
RU2370416C1 |
| ТРЕНАЖЕР | 1992 |
|
RU2037209C1 |
| Комплексная система дистанционного обучения пилотированию летательных аппаратов | 2016 |
|
RU2647345C1 |
| СПОСОБ КОНТРОЛЯ КАЧЕСТВА ПРИ ИСПЫТАНИЯХ ТРЕНАЖЕРА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
SU1833694A3 |
| Способ обучения летчиков по управлению летательным аппаратом в процессе захода на посадку | 2015 |
|
RU2620279C2 |
Изобретение относится к способу оценки инженерно-психологического подобия объектов управления. Для оценки подобия объектов производят регистрацию и анализ характеристик перемещений рычагов управления на целевом летательном аппарате (ЛА), для которого достигается подобие управления, и на оцениваемом объекте управления выполняют тестовый маневр на целевом ЛА с одновременной регистрацией перемещений рычагов управления на автономный карманный регистратор, затем тот же летчик выполняет тот же тестовый маневр на оцениваемом объекте управления, производят сравнение профилей распределения действий летчика на целевом и оцениваемом объектах управления определенным образом, принимается решение об инженерно-психологическом подобии сравниваемых объектов. Обеспечивается повышение точности оценивания инженерно-психологического подобия объектов управления и повышение достоверности прогноза положительного переноса навыков летчика с базового технического средства подготовки (наземного тренажера, учебного самолета) на целевой летательный аппарат. 2 ил.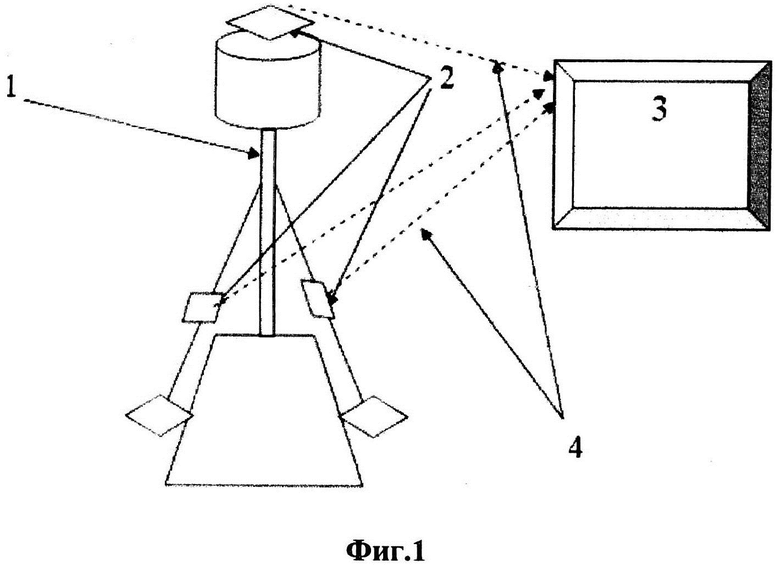
Способ оценки инженерно-психологического подобия объектов управления, обеспечивающего адекватность приобретаемых летчиком навыков пилотирования при подготовке на учебном самолете с реконфигурируемой системой управления или тренажере, предусматривающий регистрацию и анализ характеристик перемещений рычагов управления на целевом летательном аппарате (ЛА), для которого достигается подобие управления, и на оцениваемом объекте управления - учебном самолете или тренажере, подобие которого целевому ЛА обеспечивается, отличающийся тем, что летчик выполняет тестовый маневр - набор высоты из горизонтального полета с возвращением в горизонтальный полет - на целевом летательном аппарате, при этом производится регистрация перемещений рычагов управления на автономный карманный регистратор с автономным измерительным узлом, который устанавливается на рычагах управления и передатчик которого осуществляет передачу измеренных параметров перемещений рычагов управления на карманный регистратор по каналу беспроводной связи; затем тот же летчик для исключения влияния индивидуального стиля на структуру управляющего действия выполняет тот же тестовый маневр на оцениваемом объекте управления - учебном самолете или тренажере, при этом также осуществляется запись перемещений рычагов управления на автономный карманный регистратор, в базе данных которого содержится эталонная запись перемещения рычагов управления, полученная на целевом летательном аппарате; далее выполняется оценка подобия целевого ЛА и оцениваемого объекта управления путем выделения границ рабочих движений летчика рычагом «от себя», «на себя» по точкам экстремумов - минимумов, максимумов, определяемых с помощью непрерывного вычисления разности значений перемещения рычага в соседних точках, при этом анализируются значения параметра положения рычага управления в трех соседних точках, границы действий выделяются по средней точке, второй точке из трех, при условии, что разность значений параметра в третьей и второй точках меняет знак по сравнению с разностью значений параметра во второй и первой точках; определяются амплитуды выявленных рабочих движений рычагом, после чего рабочие движения летчика распределяются по заданным амплитудным диапазонам; по окончании тестового режима оценивается мощность каждого из амплитудных диапазонов относительно общего числа действий летчика, зарегистрированных в процессе выполнения тестового режима; формируется профиль мощности амплитудных диапазонов рабочих движений летчика для целевого ЛА и оцениваемого объекта управления в графической форме в виде профиля распределения действий по амплитудным, скоростным и временным диапазонам, при этом оценка подобия профилей распределения действий летчика по амплитудным диапазонам производится на основании попарной оценки коэффициентов мощности соответствующих амплитудных диапазонов рабочих движений летчика для эталонного и оцениваемого объектов управления; по результатам сравнения профилей распределения действий летчика на целевом и оцениваемом объектах управления принимается решение об инженерно-психологическом подобии сравниваемых объектов: при полном подобии коэффициентов мощности амплитудных диапазонов действий летчика отмечается полное инженерно-психологическое подобие сравниваемых объектов на уровне амплитудных диапазонов, для уточнения прогноза положительного переноса навыков, приобретаемых на оцениваемом объекте управления, далее сравниваются профили распределения действий летчика по временным и скоростным диапазонам; при сохранении общего профиля распределения действий летчика с уменьшением/увеличением значения коэффициента мощности амплитудного диапазона отмечается относительное инженерно-психологическое подобие сравниваемых объектов, требующее дополнительной тренировки при переходе на целевой ЛА, причем прогноз положительного переноса навыков также уточняется на уровне подобия профилей распределения действий летчика по временным и скоростным диапазонам; при изменении общего профиля распределения действий по амплитудным диапазонам с переменой максимума на минимум или минимума на максимум отмечается наименьшее инженерно-психологическое подобие оцениваемого и целевого объектов управления и делается вывод о необходимости переделки навыков выполнения задач управления для освоения целевого летательного аппарата.
| ПРОГНОЗИРУЮЩАЯ СИСТЕМА ОЦЕНКИ ЛЕТЧИКА ДЛЯ АВИАЦИОННОГО ТРЕНАЖЕРА | 1991 |
|
RU2006958C1 |
| СПОСОБ МОДЕЛИРОВАНИЯ ПСИХОФИЗИОЛОГИЧЕСКИХ ЭФФЕКТОВ В ТРЕНАЖЕРЕ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2007 |
|
RU2369909C2 |
| WO 2018176154 A1, 04.10.2018 | |||
| CN 102522025 A, 27.06.2012 | |||
| CN 104217623 B, 08.12.2017. | |||

