Изобретение относится к автомобилестроению, в частности, к способам и устройствам активной безопасности транспортных средств (ТС).
Известно устройство для оценки коэффициента трения скольжения колес с дорогой и способ оценки коэффициента трения колес с дорогой, в котором коэффициент трения скольжения колес с дорогой определяется на основе отношения расчетной силы поворота к расчетному углу бокового скольжения шины. Транспортное средство движется по нескольким дорожным поверхностям, которые отличаются коэффициентом трения, а углы бокового скольжения шин и силы поворота на дорожных поверхностях определяются заранее. Блок оценки коэффициента трения хранит в памяти корреляцию между обнаруженными углами бокового скольжения шины, обнаруженными силами поворота и коэффициентами трения дороги в виде числовых значений или математического выражения и оценивает коэффициент трения дороги, используя корреляцию, хранящуюся в памяти (см. патент Европейского патентного ведомства ЕР 2572947 А1, заявитель JTEKT Corp, опубл. 26.10.2016).
Основным недостатком способа является приближенность определяемого значения коэффициента трения скольжения колес автомобиля, сложная процедура обработки данных с датчиков автомобиля и применимость метода только в условиях неоднородности дорожного покрытия.
Известен способ определения коэффициента трения скольжения колес на основе базы данных, в котором информация о текущем коэффициенте трения скольжения колес, геометрических особенностях участка, координатах и времени принимается от других транспортных средств в виде базы данных (см. заявку на патент США US 20170357669 A1, заявитель Robert Bosch GmbH, опубл. 14.12.2017).
Основным недостатком способа является необходимость наличия приемно-передающих устройств в автомобилях, значительный объем полученной и переданной информации и вопрос об актуальности этой информации.
Наиболее близким по технической сущности является способ определения коэффициента трения дорожного покрытия. В рассматриваемом способе, коэффициенты трения колес определяются при пересчете частот вращения колес от ABS-датчиков в скорости скольжений колес и другие величины, необходимые для расчета коэффициентов трения скольжения каждого из колес. Средний коэффициент трения определяется при использовании весовой функции для коэффициентов трения всех колес (см. патент Японии JP 4159811 B2, заявители Koji Takao и BRIDGESTONE CORP, опубл. 01.10.2008).
Недостатком способа является неопределенность выбора весового коэффициента для каждого из усредненных значений итогового коэффициента трения скольжения.
Техническая задача, на решение которой направлено предлагаемое изобретение, состоит в косвенных измерениях максимальных значений коэффициентов трения скольжения колес транспортного средства.
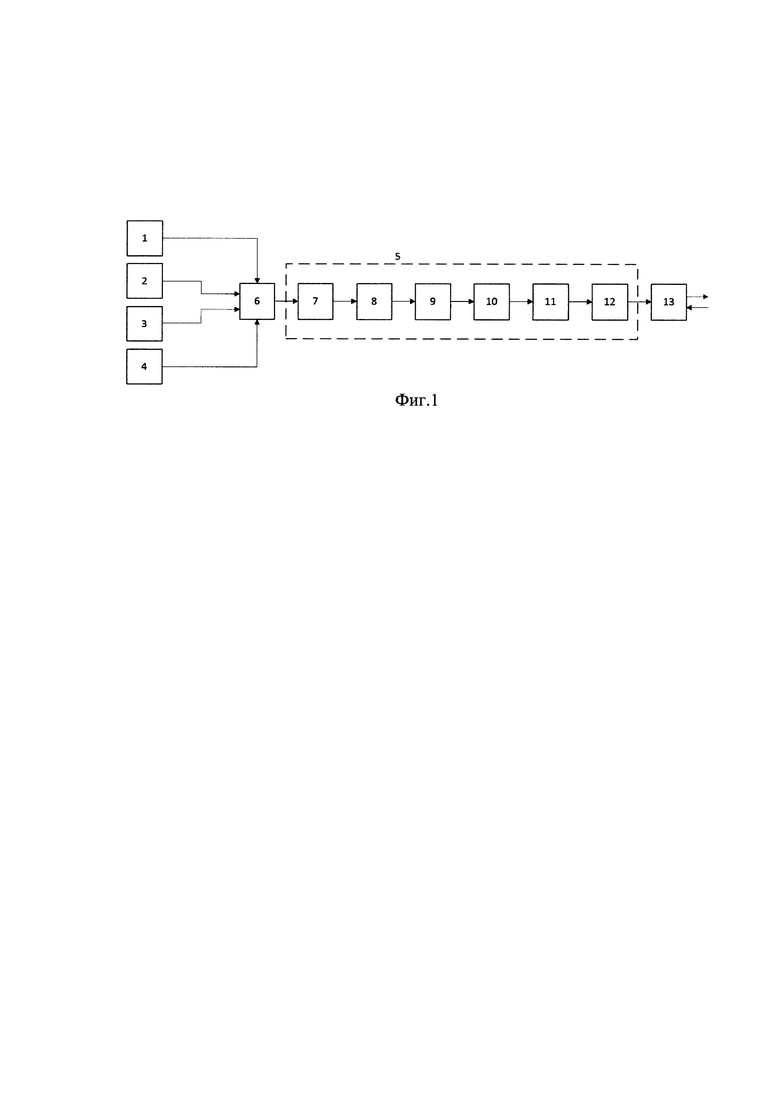
Поставленная техническая задача решается тем, что система идентификации максимальных значений коэффициентов трения скольжения колес транспортного средства, содержащая датчики 1, 2, 3, 4 частот вращения колес, электрически связанные с микроконтроллерным устройством 5 обработки информации, посредством линий связи с устройством 6 сопряжения с микроконтроллерным устройством 5, микроконтроллерное устройство 5 обработки информации включает: блок 7 анализа сигналов датчиков 1, 2, 3, 4 частот вращения колес, блок 8 оценивания параметров движения транспортного средства, блок 9 вычисления нормальных составляющих динамических нагрузок, действующих на каждое колесо, блок 10 вычисления распределения тягово-тормозных сил, действующих на каждое колесо, блок 11 решения обратной задачи кусочно-линейной аппроксимации коэффициента трения скольжения, блок 12 фильтрации оценок максимальных значений коэффициентов трения скольжения колес, блок 13 ввода-вывода служит для ввода настроечных данных и вывода результатов вычислений на внешние устройства и для индикации водителю, причем в системе блок 9 вычисления нормальных составляющих динамических нагрузок, блок 10 вычисления распределения тягово-тормозных сил, блок 11 решения обратной задачи, блок 12 фильтрации, блок 13 ввода-вывода данных выполнены на базе микроконтроллерного устройства 5 с возможностью программного исполнения блока 9 вычисления нормальных составляющих динамических нагрузок, блока 10 распределения тягово-тормозных сил, блока 11 решения обратной задачи, блока 12 фильтрации, блока 13 ввода-вывода данных, блок 9 вычисления нормальных составляющих динамических нагрузок, действующих на каждое колесо, выполнен с возможностью учета влияния продольного и поперечного ускорений на распределение нормальных составляющих динамических нагрузок, блок 10 распределения тягово-тормозных сил выполнен с возможностью учета распределения тяговых сил от двигателя и трансмиссии и от тормозной системы по колесам, блок 11 решения обратной задачи выполнен с возможностью формирования оценок максимальных значений коэффициентов трения скольжения колес в диапазоне скольжений устойчивого участка типовой зависимости силы трения от скольжения, блок 12 фильтрации оценок выполнен с возможностью снижения влияния шумов измерений на результаты идентификации за счет устранения выбросов данных в результате проверки по диапазонам и гладкости данных, удовлетворяющих условиям ограничений по первой и второй производным, блок 13 ввода-вывода данных выполнен с возможностью оперативного ввода настроечных данных используемой математической модели для шин разных моделей и вывода выходных данных водителю и к функциональным блокам системы активной безопасности.
Технические результаты достигаются путем создания системы идентификации максимальных значений коэффициентов трения скольжения колес транспортного средства, в которой блоки связаны определенным выше указанным образом.
Система идентификации максимальных значений коэффициентов трения скольжения колес транспортного средства содержит датчики 1, 2, 3, 4 частот вращения колес, электрически связанные с микроконтроллерным устройством 5 обработки информации, посредством линий связи с устройством 6 сопряжения с микроконтроллерным устройством 5, микроконтроллерное устройство 5 обработки информации включает: блок 7 анализа сигналов датчиков 1, 2, 3, 4 частот вращения колес, блок 8 оценивания параметров движения транспортного средства, блок 9 вычисления нормальных составляющих динамических нагрузок, действующих на каждое колесо, блок 10 вычисления распределения тягово-тормозных сил, действующих на каждое колесо, блок 11 решения обратной задачи кусочно-линейной аппроксимации коэффициента трения скольжения, блок 12 фильтрации оценок максимальных значений коэффициентов трения скольжения колес, блок 13 ввода-вывода данных на внешние устройства индикации водителю и ввода настроечных данных, отличающаяся тем, что в системе блок 9 вычисления нормальных составляющих динамических нагрузок, блок 10 вычисления распределения тягово-тормозных сил, блок 11 решения обратной задачи, блок 12 фильтрации, блок 13 ввода-вывода данных выполнены на базе микроконтроллерного устройства 5 с возможностью программного исполнения блока 9 вычисления нормальных составляющих динамических нагрузок, блока 10 распределения тягово-тормозных сил, блока 11 решения обратной задачи, блока 12 фильтрации, блока 13 ввода-вывода данных, блок 9 вычисления нормальных составляющих динамических нагрузок, действующих на каждое колесо, выполнен с возможностью учета влияния продольного и поперечного ускорений на распределение нормальных составляющих динамических нагрузок, блок 10 распределения тягово-тормозных сил выполнен с возможностью учета распределения тяговых сил от двигателя и трансмиссии и от тормозной системы по колесам, блок 11 решения обратной задачи выполнен с возможностью формирования оценок максимальных значений коэффициентов трения скольжения колес в диапазоне скольжений устойчивого участка типовой зависимости силы трения от скольжения, блок 12 фильтрации оценок выполнен с возможностью снижения влияния шумов измерений на результаты идентификации за счет устранения выбросов данных в результате проверки по диапазонам и гладкости данных, удовлетворяющих условиям ограничений по первой и второй производным, блок 13 ввода-вывода данных выполнен с возможностью оперативного ввода настроечных данных используемой математической модели для шин разных моделей и вывода выходных данных водителю и к функциональным блокам системы активной безопасности.
Предложение поясняется чертежами.
На Фиг. 1 показана блок-схема системы идентификации максимальных значений коэффициентов трения скольжения колес транспортного средства.
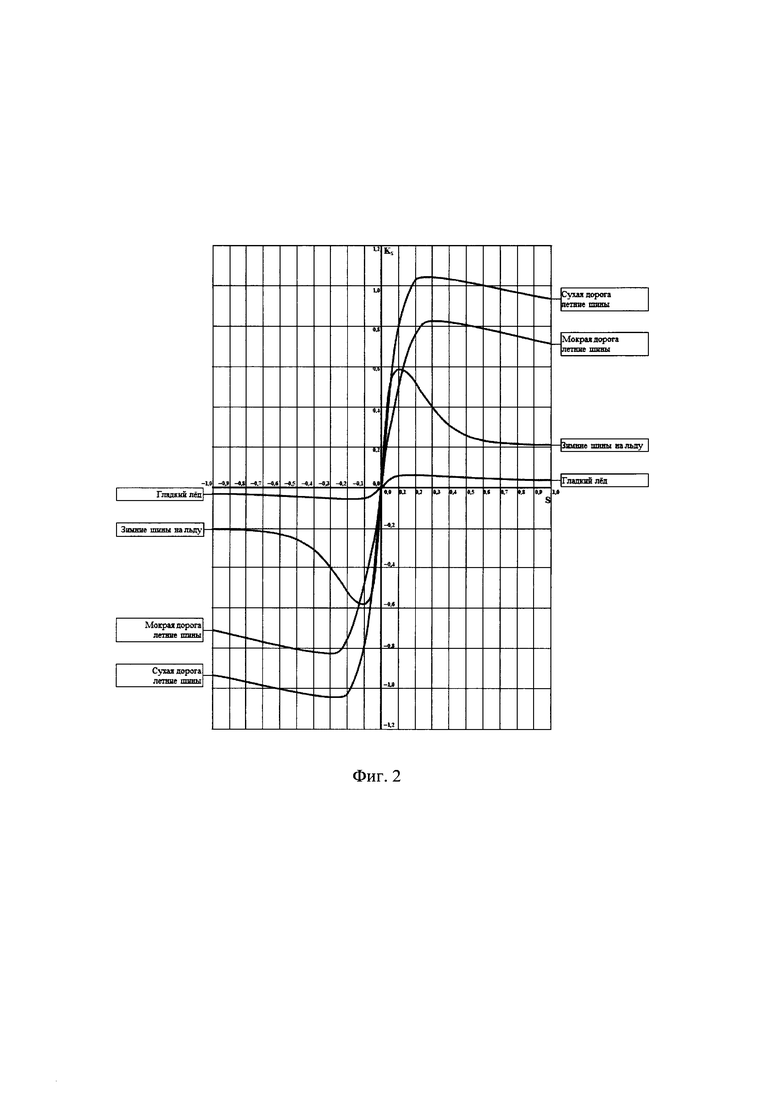
На фиг. 2 приведено семейство зависимости коэффициентов трения скольжения ks от величины продольного скольжения 5.
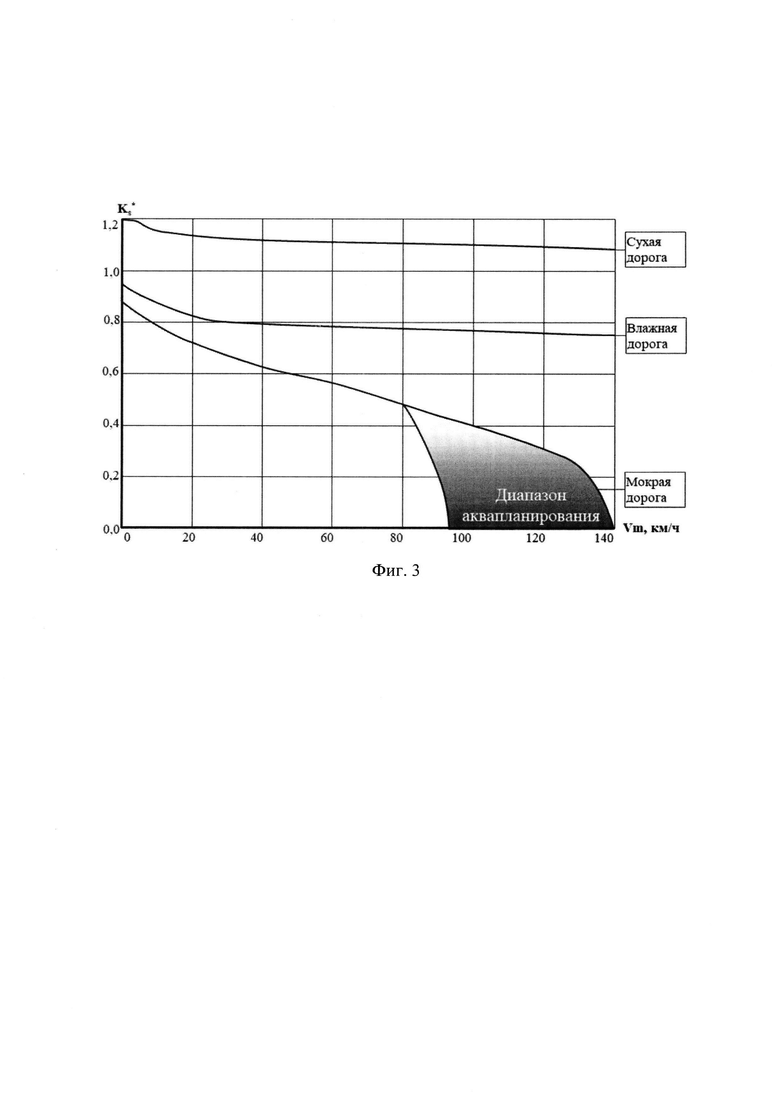
На фиг. 3 приведена зависимость  от скорости Vm на различных покрытиях.
от скорости Vm на различных покрытиях.
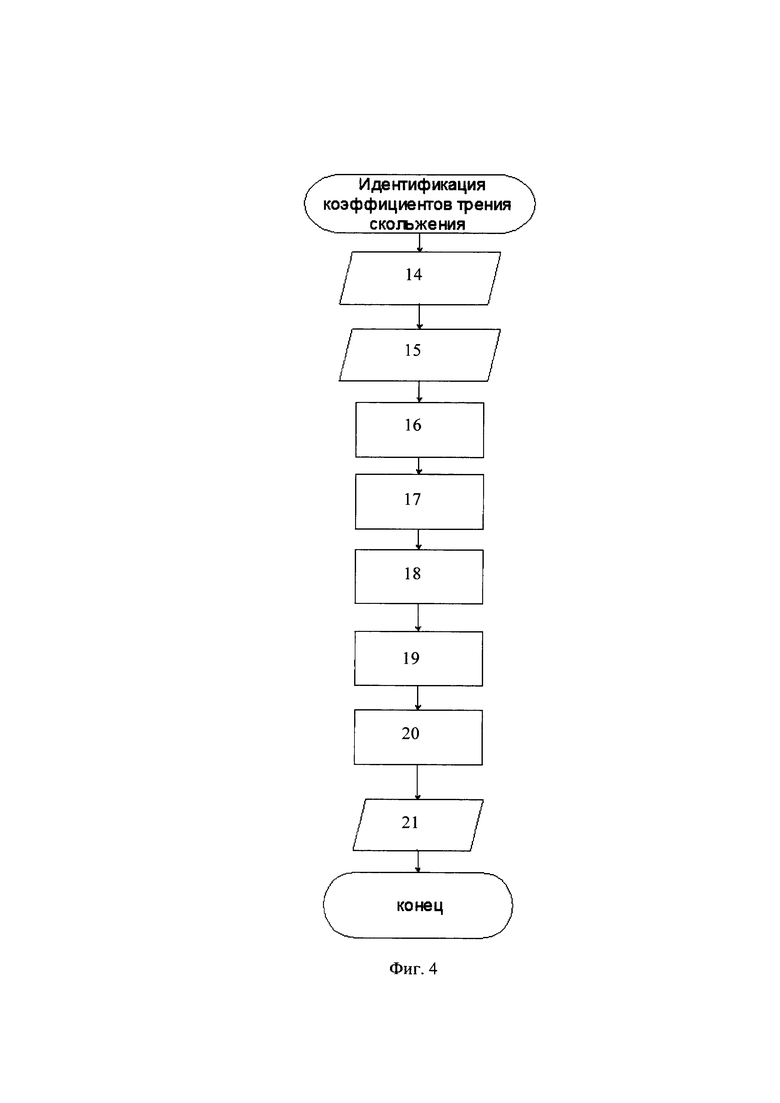
Фиг. 4 содержит вычислительный блок алгоритма максимальных значений коэффициентов трения скольжения колес ТС.
Предложенная система работает следующим образом.
При движении транспортного средства датчики 1, 2, 3, 4 вырабатывают импульсные сигналы, соответствующие частотам вращения колес транспортного средства, а так как они электрически связаны линиями связи через устройство сопряжения 6 с микроконтроллерным устройством 5, то эти сигналы посредством линий связи с устройством сопряжения 6 поступают в микроконтроллерное устройство 5 обработки информации, которое включает программный блок 7 анализа сигналов датчиков 1, 2, 3, 4 частот вращения колес, который сравнивает их значения с рабочим диапазоном сигналов датчиков и выявляет датчики у которых возникли неисправности в виде пропадания сигнала на ограниченном временном интервале, при этом показания такого датчика автоматически исключаются из дальнейшего анализа.
Далее, в микропроцессорном устройстве 5 обработки информации программный блок оценивания 8 параметров движения транспортного средства сравнивает сигналы от датчиков 1, 2, 3, 4 частот вращения колес транспортного средства и получает согласно алгоритму программы для ЭВМ данные, характеризующие параметры движения транспортного средства, в частности, продольную скорость центра масс, продольное и поперечное ускорения, угол поворота управляемых колес, скорости продольных скольжений колес, давления воздуха в шинах и др. (См. свидетельство о государственной регистрации программы для ЭВМ №2009616286. Программа «ИНКА-СПОРТ версия 2.0/ Бузников С.Е., Елкин Д.С.// Роспатент 2009 г.).
В блоке 9 вычисления нормальных составляющих динамических нагрузок выполняется расчет распределения нормальных составляющих сил, действующих на каждое колесо, с учетом полной массы и развесовки по осям, радиусов колес, ширины колеи, колесной базы и высоты центра масс, задаваемых в настроечных данных блока 13 ввода-вывода, а также продольных и поперечных ускорений, определяемых в блоке 8.
В блоке 10 вычисления распределения тягово-тормозных сил по колесам выполняется расчет тяговых и тормозных сил, действующих на колеса с учетом типа привода (передний, задний, полный) и параметров тормозной системы, задаваемых в настроечных данных блока 13 ввода-вывода.
В блоке 11 решения обратной задачи кусочно-линейной аппроксимации зависимости коэффициента трения скольжения от величины скольжения колеса выполняется расчет максимального значения коэффициента трения скольжения для одного из трех участков аппроксимации исходной кривой в зависимости от измеренного скольжения колеса.
В блоке 12 фильтрации оценок максимальных значений коэффициентов трения скольжения колес выполняется проверка условий достоверности полученных оценок путем их сравнения с допустимым диапазоном изменений, допустимыми величинами первой и второй производных, задаваемых в настроечных данных блока 13 ввода-вывода.
Блок 13 ввода-вывода выполняет функции ввода и хранения настроечных данных, а также индикации водителю оценок максимальных значений коэффициентов трения скольжения колес и их передачу внешним устройствам активной безопасности.
Предложение поясняют рисунки, разъясняющие расчетные формулы и процесс вычисления промежуточных параметров по ним, где на фиг. 2 приведено семейство зависимости коэффициентов трения скольжения ks от величины продольного скольжения S, представленных в виде нечетных функций ks(S)=-ks(-S) для различных поверхностей с максимальными значениями  .
.
Опыт, накопленный в результате исследований свойств шин, показывает, что в условиях реальной эксплуатации величины коэффициентов трения скольжения  (1≤i≤4 для 4-х колесной схемы) шин и передаваемые силы при разгонах, торможениях и поворотах, существенно зависят от целого ряда определенных факторов и могут изменяться в достаточно широких пределах.
(1≤i≤4 для 4-х колесной схемы) шин и передаваемые силы при разгонах, торможениях и поворотах, существенно зависят от целого ряда определенных факторов и могут изменяться в достаточно широких пределах.
К числу основных факторов, существенно влияющих на  , относятся:
, относятся:
- скорости продольного скольжения шины;
- состав резиновой смеси материала протектора шины;
- глубина и форма рисунка протектора шины;
- температура шины и поверхности дорожного покрытия;
- ширина профиля шины;
- давление воздуха в шине;
- состояние поверхности дорожного покрытия;
- глубина водного слоя на поверхности дорожного покрытия;
- скорость продольного движения центра масс автомобиля.
Диапазон изменений максимальных значений коэффициентов трения скольжения  современных шоссейных шин ограничен сверху величиной порядка 1, 2 для сухого асфальтобетона, а для сликов может доходить до значений 1, 8 и более, снизу эти значения ограничены величиной порядка 0,05 в случае движения по таящему льду. В режиме аквапланирования величина
современных шоссейных шин ограничен сверху величиной порядка 1, 2 для сухого асфальтобетона, а для сликов может доходить до значений 1, 8 и более, снизу эти значения ограничены величиной порядка 0,05 в случае движения по таящему льду. В режиме аквапланирования величина  может снижаться практически до нулевых значений.
может снижаться практически до нулевых значений.
На фиг. 3 приведена зависимость  от скорости Vm на различных покрытиях.
от скорости Vm на различных покрытиях.
Изменения  сопровождаются соответствующими изменениями граничной скорости пробуксовок ведущих колес, граничных скоростей заноса и сноса колес задней и передней осей, граничных значений безопасных дистанций между попутными ТС и тормозного пути.
сопровождаются соответствующими изменениями граничной скорости пробуксовок ведущих колес, граничных скоростей заноса и сноса колес задней и передней осей, граничных значений безопасных дистанций между попутными ТС и тормозного пути.
Идентификация коэффициентов трения скольжения заключается в формировании адекватных оценок  максимальных значений коэффициентов трения скольжения в соответствии с третьим законом Ньютона и основана на уравнении равенства тягово-тормозных сил и сил трения скольжения.
максимальных значений коэффициентов трения скольжения в соответствии с третьим законом Ньютона и основана на уравнении равенства тягово-тормозных сил и сил трения скольжения.

Fi - тягово-тормозная сила, воздействующая на i-e колесо;
FNi - нормальная составляющая динамической нагрузки на i-e колесо;
kSi - коэффициент трения скольжения i-ro колеса.
Коэффициенты трения скольжения в продольных kSdi и поперечных kSqi направлениях связанные между собой ограничением "круга Камма":

 - топовое (максимальное) значение коэффициента трения скольжения i-го колеса.
- топовое (максимальное) значение коэффициента трения скольжения i-го колеса.
Фиг. 4 содержит вычислительный блок алгоритма максимальных значений коэффициентов трения скольжения колес ТС, реализующий следующие действия способа:
14 - ввод данных настроечных параметров математической модели ТС;
15 - ввод данных о частотах вращения колес;
16 - вычисление параметров движения ТС;
17 - вычисление нормальных составляющих динамической нагрузки на каждое колесо;
18 - вычисление тягово-тормозных сил, воздействующих на каждое колесо; 19- решение обратной задачи кусочно-линейной аппроксимации коэффициента трения скольжения;
20 - фильтрация оценок максимальных значений коэффициентов трения скольжения колес;
21 - вывод данных на внешние устройства.
Ввод настроечных данных параметров математической модели ТС и используемых шин выполняют однократно в блок 13 ввода-вывода ввода настроечных данных при настройке системы в случаях внесения изменений, например, при замене шин с летних на зимние или наоборот.
Изменения сезонных настроек параметров используемых шин выполняют автоматически при вводе команд «Лето» или «Зима» с устройства ввода данных.
Сигналы, формируемые импульсными датчиками 1, 2, 3, 4 частот вращения колес ТС, регистрируют и передают их через устройство 6 сопряжения в микроконтроллерное устройство 5 обработки информации.
В микроконтроллерном устройстве 5 обработки информации производят вычисления параметров движения колесного ТС по известному способу косвенных измерений (См. Патент РФ №2335805 «Способ предотвращения столкновения автомобиля с препятствиями и система для его осуществления») определяют скорость центра масс ТС (Vm), продольные и поперечные ускорения (am, aq), угол поворота управляемых колес (ϕс) и продольные скольжения колес (Si, 1≤i≤4).
В блоке 9 вычислений нормальных составляющих динамических нагрузок вычисляют значения нагрузок на колеса. Нормальные составляющие нагрузки на i-e колесо FNi определяют в виде:
m1, m2, m3, m4 - массы, приходящиеся соответственно на переднее левое (i=1), переднее правое (i=2), заднее левое (i=3) и заднее правое (i=4) колесо;
g - ускорение свободного падения;
mO - суммарная масса автомобиля;
adT=(ad-аТ) - продольное тягового- тормозное ускорение центра масс;
 - тяговое ускорение центра масс;
- тяговое ускорение центра масс;
Fdi, 1≤i≤4, - тяговая сила, приложенная к i-му колесу;
 - тормозное замедление центра масс;
- тормозное замедление центра масс;
FTi, 1≤i≤4, - тормозная сила, приложенная к i-му колесу;
 - поперечное ускорение центра масс;
- поперечное ускорение центра масс;
Rm - радиус поворота;
b - колесная база;
а - ширина колеи;
hm - высота центра масс;
Rd - динамический радиус колес;
aT - угол тангажа;
βk - угол крена дорожного покрытия;
kz1, kz2, kz3, kz4 - коэффициенты аэродинамического сопротивления по вертикальной оси;
Vm - продольная скорость центра масс.
В условиях движения, близкого к прямолинейному (aq≈0) на горизонтальной гладкой поверхности, без продольных (aT≈0) и поперечных уклонов (βk≈0) дорожного покрытия и антикрыльев, систему уравнений (3) использует для вычисления в блоке 9 нормальных составляющих нагрузки на каждое колесо.
Величину тягово-тормозного ускорения adT определяют в блоке 10 на основе вычисления распределения тягово-тормозных сил из уравнения второго закона Ньютона в виде:

где: kx - коэффициент лобового аэродинамического сопротивления;
kтр - коэффициент трения качения шин.
Величины am и Vm, входящие в вектор параметров движения, измеряют по данным сигналов датчиков 1, 2, 3, 4 частот вращения колес, значения kx, kтр и mo вводят как параметры настройки. В условиях движения по поверхностям, близким к горизонтальным (аТ≈0), величина adT определяется однозначно.
Распределение тяговых Fdi и тормозных сил FTi по колесам (1≤i≤4) задается уравнениями:


K3i - коэффициенты усиления i-го тормоза;
 - управляющее воздействие на тормозную систему;
- управляющее воздействие на тормозную систему;
РТ - давление в тормозной системе;
PTmax - максимальное давление в тормозной системе.
Величину U3 определяют по данным измерения adT в виде:

amin - минимальное значение замедления при торможении с не отключенной трансмиссией, задаваемое в настроечных данных;
amax - максимальное значение замедления.
Зависимость коэффициента трения скольжения в продольном направлении от величины продольного скольжения  колеса аппроксимируют в блоке 11 кусочно-линейной функцией вида:
колеса аппроксимируют в блоке 11 кусочно-линейной функцией вида:

Е, SГр1, SГр2 - параметры настройки для используемых моделей шин в условиях летней и зимней эксплуатации (например, Е=0.005, SГр1=0.15, SГр2=0.3);
a0, b0, - вещественные числа, задаваемые при настройке кусочно-линейной аппроксимации (например, а0=0.25, b0=5.0).
Текущие значения коэффициентов трения скольжения kSi определяют из уравнения (1) 3-го закона Ньютона, соответствующих равенству действующих на колеса внешних сил и сил трения скольжения.
Оценки максимальных значений коэффициентов трения скольжения  в дискретном времени определяют как решение в блоке 11 обратной задачи кусочно-линейной аппроксимации kSi (Si):
в дискретном времени определяют как решение в блоке 11 обратной задачи кусочно-линейной аппроксимации kSi (Si):

Оценки максимальных (топовых) значений коэффициентов трения скольжения ведомых колес не определяют в режимах разгона и движения с постоянной скоростью (adT>0) и устанавливают равными оценкам ведущих колес одного борта  и
и  .
.
Фильтрацию оценок максимальных значений коэффициентов трения скольжения колес с целью ограничения влияния шумов измерения на результаты, выполняют в блоке 12 фильтрации оценок по известным алгоритмам ограничений по допустимому диапазону и гладкости по ограничениям по первой и второй производной.
Итоговая оценка максимального значения коэффициентов трения скольжения колес определяется в виде:

Вывод данных на внешнее устройство выполняют, например, на устройство визуального отображения информации и/или на блоки управления движением для использования в качестве входных данных для обеспечения безопасного управления, тягой, тормозами и рулем.
Рассмотренный алгоритм идентификации максимальных значений коэффициентов трения скольжения колес был реализован программно в блоке 12 фильтрации оценок максимальных значений коэффициентов трения скольжения колес для задач управления автомобилем и зарегистрирован в Роспатенте (Свидетельство об официальной регистрации программ для ЭВМ №2007610818 «Идентификация максимальных значений коэффициентов трения скольжения колес автомобиля», 2007).
К числу преимуществ, то есть технических результатов, достигаемых предлагаемой системой можно отнести следующие:
- идентификация максимальных значений коэффициентов трения скольжения шин выполняется при разгонах, движении с постоянной скоростью и торможениях;
- низкая стоимость технических средств, обусловленная отсутствием необходимости введения дополнительных физических датчиков первичной информации, необходимых для решения поставленной технической задачи;
- возможность функционирования в неполной конфигурации датчиков частот вращения колес, включая отказы одного или двух датчиков с разных бортов автомобиля;
- пониженное энергопотребление, обусловленное отсутствием дополнительных датчиков информации;
- более высокая эксплуатационная надежность, обусловленная минимальной конфигурацией используемых технических средств, включая датчики первичной информации;
- отсутствие влияния состояния внешней среды, включая освещенность, осадки, туман и прочее, на эффективность функционирования системы.
На основании изложенного можно утверждать следующее.
Поставленная техническая задача решается техническими средствами и может быть использована в предложенном виде как в новых, так и в находящихся в эксплуатации транспортных средствах в народном хозяйстве, следовательно, предложение соответствует критерию изобретения «промышленная применимость».
Предложение имеет отличия от известной системы, следовательно, соответствует критерию изобретения «новизна».
Использование всех известных и новых действий способа работы системы предлагаемого технического решения при создании и модернизации систем активной безопасности транспортных средств позволяет достичь новых, ранее неизвестных технических результатов, следовательно, соответствует критерию изобретения «изобретательский уровень».
Перечень позиций
1. датчик 1 частот вращения колес,
2. датчик 2 частот вращения колес,
3. датчик 3 частот вращения колес,
4. датчик 4 частот вращения колес.
5. микроконтроллерное устройство 5 обработки информации
6. линии связи с устройством 6 сопряжения с микроконтроллерным устройством 5 обработки информации
7. блок 7 анализа сигналов датчиков 1, 2, 3, 4 частот вращения колес,
8. блок 8 оценивания параметров движения транспортного средства,
9. блок 9 вычисления нормальных составляющих динамических нагрузок, действующих на каждое колесо,
10. блок 10 вычисления распределения тягово-тормозных сил, действующих на каждое колесо,
11. блок 11 решения обратной задачи кусочно-линейной аппроксимации коэффициента трения скольжения,
12. блок 12 фильтрации оценок максимальных значений коэффициентов трения скольжения колес,
13. блок 13 ввода-вывода данных на внешние устройства индикации водителю и ввода настроечных данных, вычислительный блок алгоритма максимальных значений коэффициентов трения скольжения колес ТС, реализующий следующие действия способа
14. ввод данных настроечных параметров математической модели ТС;
15. ввод данных о частотах вращения колес;
16. вычисление параметров движения ТС;
17. вычисление нормальных составляющих динамической нагрузки на каждое колесо;
18. вычисление тягово-тормозных сил, воздействующих на каждое колесо;
19. решение обратной задачи кусочно-линейной аппроксимации коэффициента трения скольжения;
20. фильтрация оценок максимальных значений коэффициентов трения скольжения колес;
21. вывод данных на внешние устройства.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система идентификации максимальных значений коэффициентов трения скольжения колёс автомобиля и прицепа в составе системы управления движением автопоезда | 2023 |
|
RU2812025C1 |
| Способ идентификации максимальных значений коэффициентов трения скольжения колёс транспортного средства | 2022 |
|
RU2779539C1 |
| Способ идентификации максимальных значений коэффициентов трения скольжения колёс автомобиля и прицепа в составе системы управления движением автопоезда | 2023 |
|
RU2811997C1 |
| СПОСОБ ПРЕДОТВРАЩЕНИЯ АВАРИЙНОГО ПЕРЕГРЕВА ШИН И ТОРМОЗОВ АВТОМОБИЛЯ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2513439C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО ТОРМОЖЕНИЯ КОЛЕСНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2019 |
|
RU2737069C1 |
| СПОСОБ ПРЕДОТВРАЩЕНИЯ СНОСА И ЗАНОСА КОЛЕС АВТОМОБИЛЯ | 2018 |
|
RU2702878C1 |
| Система стабилизации безопасной скорости колесного транспортного средства | 2019 |
|
RU2744642C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВОЙ СКОРОСТИ ДРИФТА КОЛЕС АВТОМОБИЛЯ | 2018 |
|
RU2717121C2 |
| Способ предотвращения сноса и заноса колёс системой помощи водителю автопоезда | 2023 |
|
RU2812000C1 |
| СПОСОБ ПРЕДОТВРАЩЕНИЯ СТОЛКНОВЕНИЙ АВТОМОБИЛЯ С ПРЕПЯТСТВИЯМИ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2335805C1 |
Система содержит датчики частот вращения колес, микроконтроллер, устройство сопряжения. Микроконтроллер содержит выполненные с возможностью программного исполнения блок анализа сигналов датчиков частот вращения колес, блок оценивания параметров движения транспортного средства, блок вычисления нормальных составляющих динамических нагрузок, действующих на каждое колесо, блок вычисления распределения тягово-тормозных сил, действующих на каждое колесо, блок решения обратной задачи кусочно-линейной аппроксимации коэффициента трения скольжения, блок фильтрации оценок максимальных значений коэффициентов трения скольжения колес, блок вывода данных на внешние устройства индикации водителю и ввода настроечных данных. Достигается получение косвенных измерений максимальных значений коэффициентов трения скольжения колес транспортного средства. 4 ил.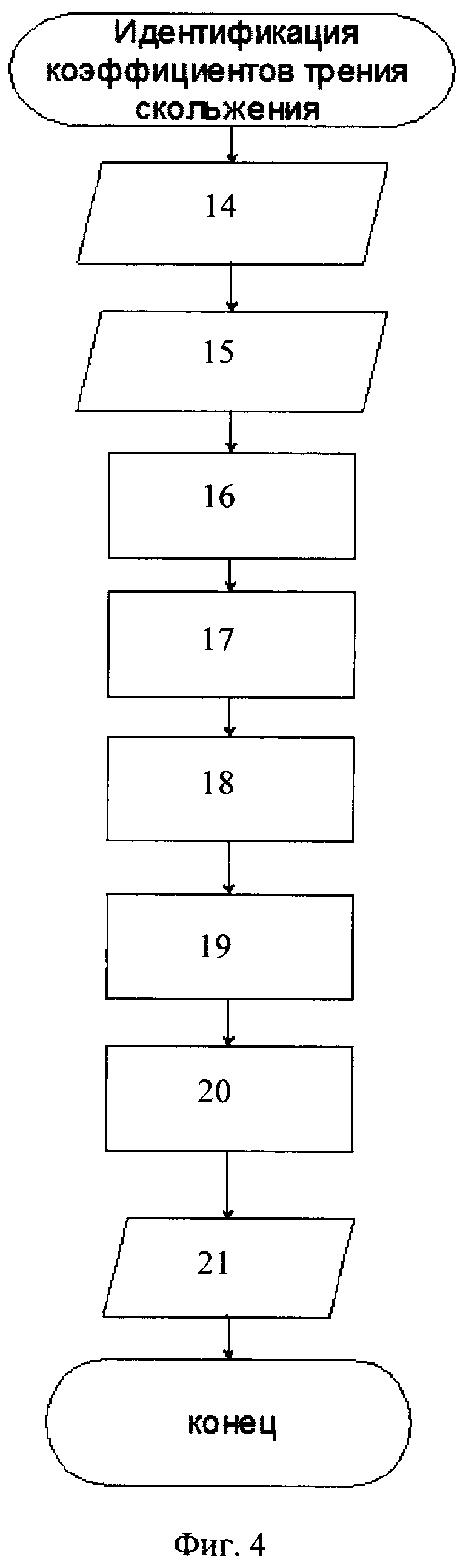
Система идентификации максимальных значений коэффициентов трения скольжения колес транспортного средства содержит датчики (1, 2, 3, 4) частот вращения колес, электрически связанные с микроконтроллерным устройством (5) обработки информации, посредством линий связи с устройством (6) сопряжения с микроконтроллерным устройством (5), микроконтроллерное устройство (5) обработки информации включает: блок (7) анализа сигналов датчиков (1, 2, 3, 4) частот вращения колес, блок (8) оценивания параметров движения транспортного средства, блок (9) вычисления нормальных составляющих динамических нагрузок, действующих на каждое колесо, блок (10) вычисления распределения тягово-тормозных сил, действующих на каждое колесо, блок (11) решения обратной задачи кусочно-линейной аппроксимации коэффициента трения скольжения, блок (12) фильтрации оценок максимальных значений коэффициентов трения скольжения колес, блок (13) вывода данных на внешние устройства индикации водителю и ввода настроечных данных, отличающаяся тем, что в системе блок (9) вычисления нормальных составляющих динамических нагрузок, блок (10) вычисления распределения тягово-тормозных сил, блок (11) решения обратной задачи, блок (12) фильтрации, блок (13) ввода-вывода данных выполнены на базе микроконтроллерного устройства (5) с возможностью программного исполнения блока (9) вычисления нормальных составляющих динамических нагрузок, блока (10) распределения тягово-тормозных сил, блока (11) решения обратной задачи, блока (12) фильтрации, блока (13) ввода-вывода данных, блок (9) вычисления нормальных составляющих динамических нагрузок, действующих на каждое колесо, выполнен с возможностью учета влияния продольного и поперечного ускорений на распределение нормальных составляющих динамических нагрузок, блок (10) распределения тягово-тормозных сил выполнен с возможностью учета распределения тяговых сил от двигателя и трансмиссии и от тормозной системы по колесам, блок (11) решения обратной задачи выполнен с возможностью формирования оценок максимальных значений коэффициентов трения скольжения колес в диапазоне скольжений устойчивого участка типовой зависимости силы трения от скольжения, блок (12) фильтрации оценок выполнен с возможностью снижения влияния шумов измерений на результаты идентификации за счет устранения выбросов данных в результате проверки по диапазонам и гладкости данных, удовлетворяющих условиям ограничений по первой и второй производным, блок (13) ввода-вывода данных выполнен с возможностью оперативного ввода настроечных данных используемой математической модели для шин разных моделей и вывода выходных данных водителю и функциональным блокам системы активной безопасности.
| СИСТЕМА АВТОМАТИЧЕСКОГО ТОРМОЖЕНИЯ КОЛЕСНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2019 |
|
RU2737069C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ТОРМОЖЕНИЕМ | 2020 |
|
RU2744524C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ РАСПРЕДЕЛЕНИЕМ ДВИЖУЩЕЙ СИЛЫ | 2008 |
|
RU2376174C1 |

