- Изобретение относится преимущественно к коляскам для ийвалидоб, предназначенным для преодоления ступенчатых маршей и выступов.г
Известен движитель инвалидной коляски; соде рйеа1цйй установленное на валу водило снабженное планетарным механизмом в виде центральной шестерни, жёстко закрепленной на валу, четырех промежуточных к четырех крайних сателлитов, закрепленных на водиле с возможностью
вращения относительно него, и опоры с эластичными подпятниками, жестко закрепленные на крайних сателлитах.
Существенным недостатком устройства
является недостаточная проходимость,
обусловленная жесткой программойуправления положением опор, обусловливающей
движение по лестницам одного профиля, к
тому же планетарный механизм управления
обусловливает значительные габаритные
размеры движителя по сравнению с размером ступеньки и существенную энергбем- кость из-за многочисленных зубчатых зацеплений.
Известен движитель транспортного средства, содержащий внутренние звенья,
установленные на валутранспортного средства с возможностью поворота, и наружные Звенья, шарнирно закрепленные на конце
.каждого внутреннего звена. , Существенным недостатком устройства является недостаточная проходимость, обусловленная программным (заданным направляющей) изменением его формы, т.к. случайная пробуксовка на ступеньках приводит к накоплению отставания от шага лестничного марша и срыву со ступенек, к тбму же движитель содержит неуправляем
мые по положению башмаки, что также может приводить к срыву при упоре в край Ступеньки. Движитель требует и значитель- ной энергии для привода в связи с открыт ы- ;ми парами качения (ролик-напразляющая) и существенной собственной массой взиду
многоэлементности устройства,
Цель изобретения - снижение знерго емкости и повышение проходимости. - Нафиг.1 изображен виддсмжитеяя сбо-1
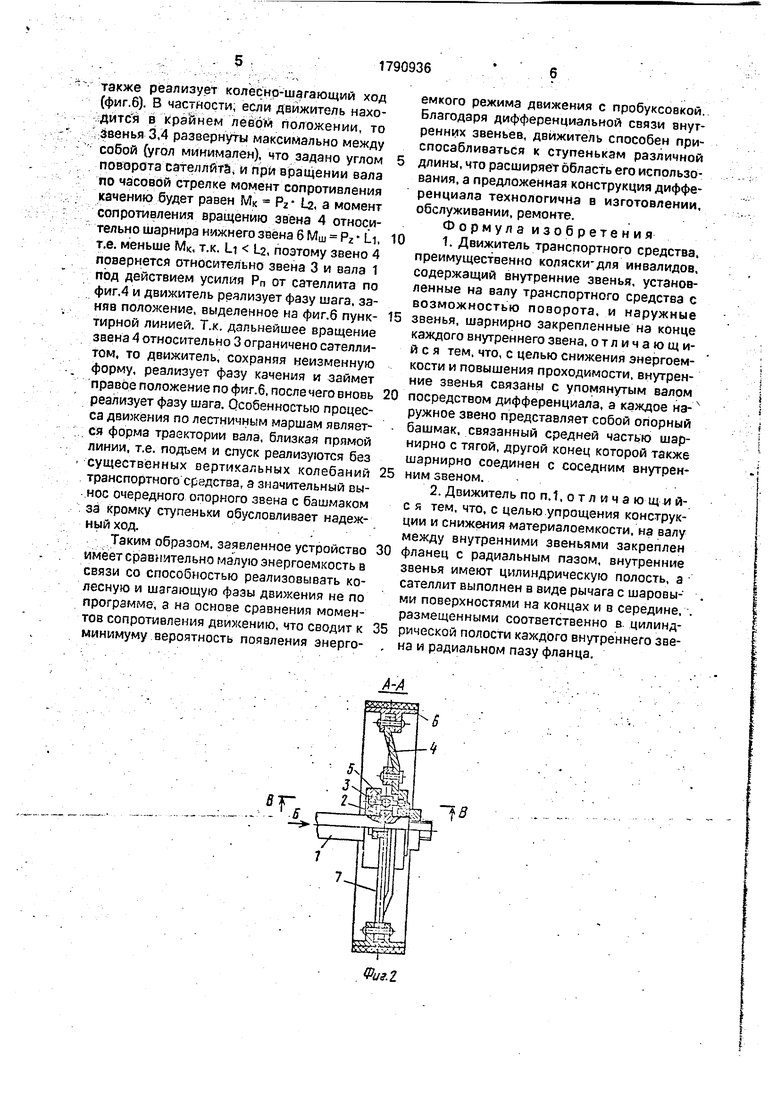
- ку; на фиг.2 - разрез А-А на фиг.1 j на фиг.З
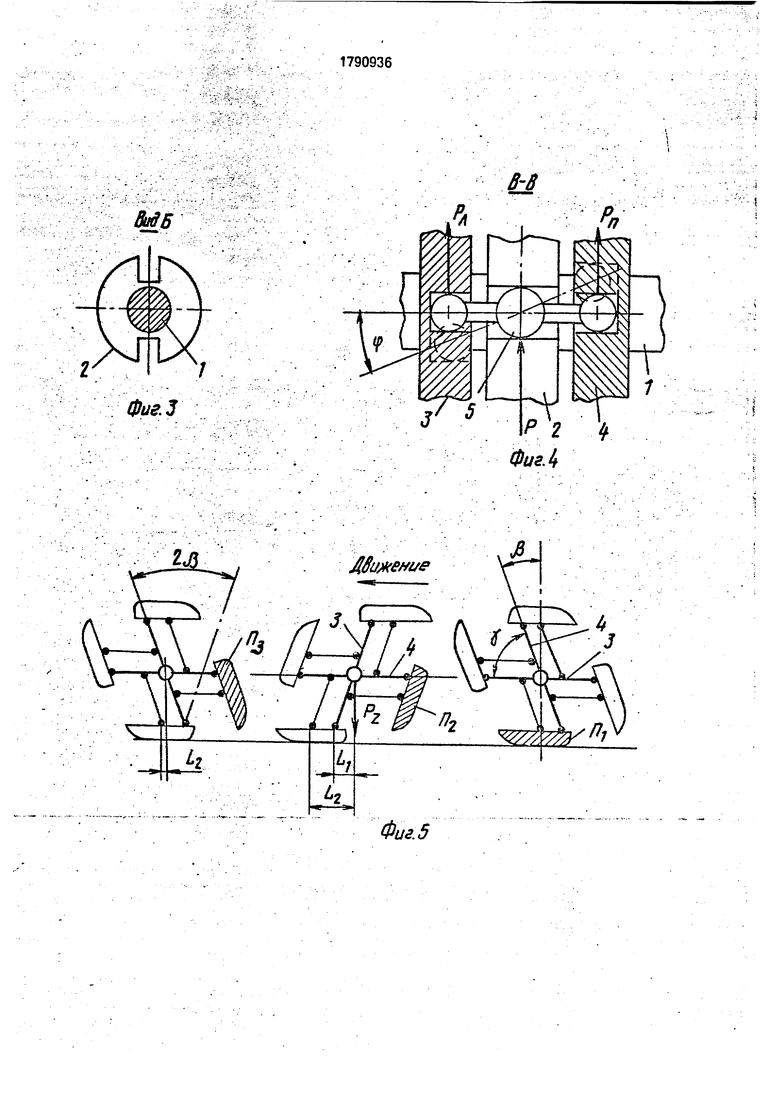
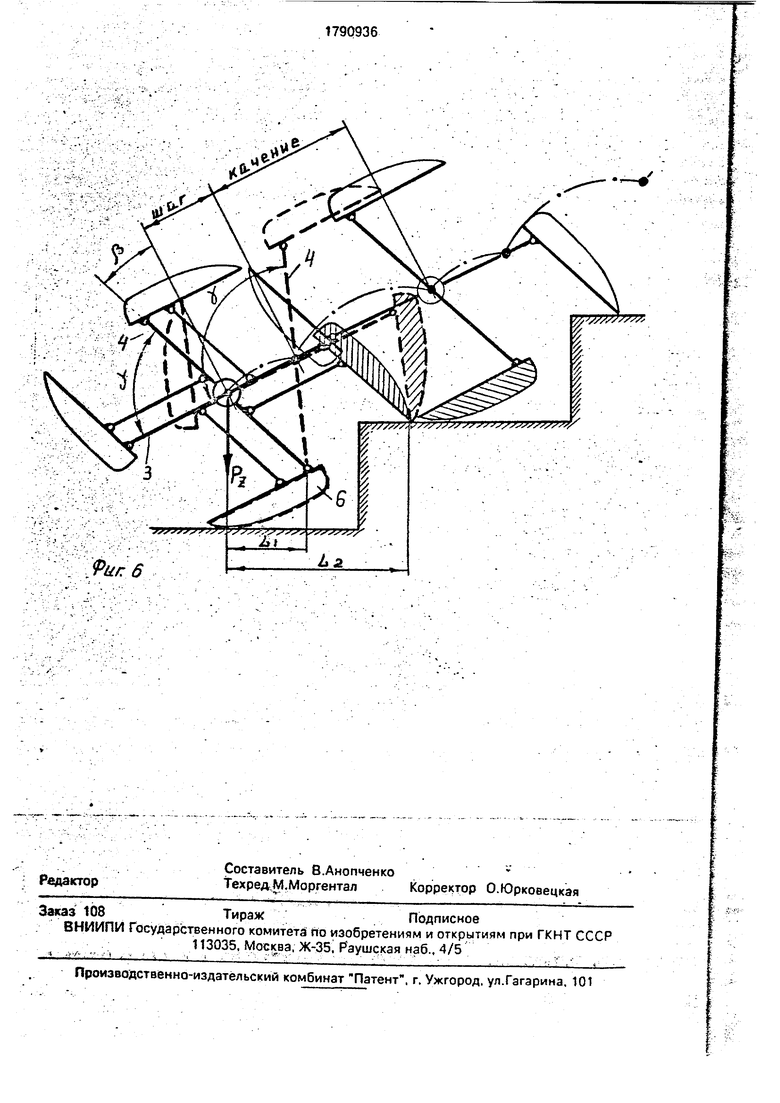
- вид Б на фиг.2; на ф«г.4 - разрез В-В на фиг.2; на фйг.5 - схема колесно-шзгающего хода движителя; на фиг.б - схема подъема движителя по лестнице.
Движитель содержит (фиг, 1,2.3) вал 1 с
фланцем 2, по обе стороны которого установлены поворотно внутренние звенья 3, 4,
связанные между собой и фланцем 2 равноплечим рычагом-сателлитом 5, установленним своими шзрооымй поверхностями в
0
5
пазу фланца 2 и цилиндрических углублениях звеньев 3.4. На каждом конце этих звень- ев установлено концом шарнирно, с возможностью поворота в плоскости вращения движителя, наружное звено 6, выполняющее функции опорного башмака, связанного средней частью посредством шарнира с тягой 7, другой конец которой шарнирно соединён с соседним внутренним звеном с образованием шарнирного параллелограмма (например а.б.в.г на фиг.1).
Движитель работает следующим образом.. /: . .,
Если вал 1 неподвижен (фиг.4), то поворот на нем звена 4 ограничен углом р поворота сателлита 5 в пазу фланца 2, причем звено 3 будет поворачиваться в противоположную сторону на этот же угол. При вращении вала 1 окружная сила Р. передается стенкой паза центральной шаровой поверхности сателлита 5, а его концевые поверхности воздействуют на звенья 3,4 усилием Рл Рп 0,5 Р. Как и в обычном дифференциале, вращаться будет на валу 1 в пределах угла 2 ф то звено, у которого меньше момент сопротивления вращению, а угол р задается при проектировании с учетом выбранных кинематических и силовых параметров, т.е. жестких ограничений не имеет. .При движении по опорной поверхности дви житель реализует колес нониагающий ход
(фиг.5). В частности, если движитель находится в правом положении, то звено 4 повернуто на валу 1 против часовой стрелки на 5 угол / относительна фиг.1, при этом сателлит 5 повернут на угол (р (фиг.4) до упора в стенку паза во фланец 2 и звенья 3,4 будут вращаться с валом 1 с одинаковой угловой скоростью, реализуя фазу качения, в течение которой угол у между звеньями не меняется и опорный башмак, заштрихованный на фиг.5, из положения Пч займет положение П-2. а движитель установится на очередной башмак (средняя схема на фиг.5). Для дальнейшего качения необходимо преодолеть момент Мп Pz ф L2. где 1г - расстояние от вала 1 до конца пятна контакта. Pz - сила тяжести, приведенная к валу 1, а для поворота звена 3 относительно нижнего башмака необходимо преодолеть момент Мл Pz LI, меньший Мп. поэтому сателлит 5 повернет звено 3 по стрелке Рл (фиг.4), а движитель реализует фазу шага, перенеся звено 4 пло- скопяраллельно влево. Движитель примет положениэ по левой схеме фиг.5, после чего расстояние L2. а значит, и момент сопротивления качению снизится до минимума и дви- житель вновь реализует фазу качения. При подъеме по лестничному маршу движитель
«К ;Ы
0
5
0
0
5
0
5
акже реализует колёснр-шагающий ход фиг.6). В частности, если движитель нахо- йтс51 в крайнем левой положении, то венья 3,4 развернуты максимально между собой (угол минимален), что задано углом 5 поворота сателлита и при вращении вала по часовой стрелке момент сопротивления качению будет равен М« Pz La, а момент сопротивления вращению звена 4 относительно шарнира нижнего звена 6 Мш Pz Li, 10 т.е. меньше М, т.к. Li L2, поэтому звено 4 повернется относительно звена 3 и вала 1 под действием усилия Рп от сателлита по фиг, 4 и движитель реализует фазу шага, заняв положение, выделенное на фиг.6 пунк- 15 тирной линией. Т.к. дальнейшее вращение звена А относительно 3 ограничено сателлитом, то движитель, сохраняя неизменную форму, реализует фазу качения и займет правое положение по фиг.б, после чего вновь 20 реализует фазу шага. Особенностью процесса движения по лестничным маршам является форма траектории вала, близкая прямой линии, т.е. подъем и спуск реализуются без существенных вертикальных колебаний 25 транспортного средства, а значительный вынос очередного опорного звена с башмаком за кромку ступеньки обусловливает надежный ход.
Таким образом, заявленное устройство 30 имеет сравнительно малую энергоемкость в связи со способностью реализовывать колесную и шагающую фазы движения не по программе, а на основе сравнения моментов сопротивления движению, что сводит к 35 минимуму вероятность появления энерго- ,
емкого режима движения с пробуксовкой. Благодаря дифференциальной связи внутренних звеньев, движитель способен приспосабливаться к ступенькам различной длины, что расширяет область его использования, а предложенная конструкция дифференциала технологична в изготовлении, обслуживании, ремонте.
Формула изобретения
1. Движитель транспортного средства, преимущественно коляски-для инвалидов, содержащий внутренние звенья, установленные на валу транспортного средства с возможностью поворота, и наружные звенья, шарнирно закрепленные на конце каждого внутреннего звена, отличающийся тем. что, с целью снижения энергоемкости и повышения проходимости, внутренние звенья связаны с упомянутым валом посредством дифференциала, а каждое нэружное звено представляет собой опорный башмак, связанный средней частью шарнирно с тягой, другой конец которой также шарнирно соединен с соседним внутренним звеном.
2. Движитель по п.1, о т л и ч а ю щ и й- с я тем, что, с целью упрощения конструкции и снижения материалоемкости. на валу между внутренними звеньями закреплен фланец с радиальным пазом, внутренние звенья имеют цилиндрическую полость, а сателлит выполнен в виде рычага с шаровыми поверхностями на концах и в середине, размещенными соответственно в. цилиндрической полости каждого внутреннего звена и радиальном пазу фланца.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОЛЕСНО-ШАГАЮЩИЙ ДВИЖИТЕЛЬ | 1992 |
|
RU2038248C1 |
| ИНВАЛИДНАЯ КОЛЯСКА С ЭЛЕКТРОМЕХАНИЧЕСКИМ ПРИВОДОМ | 1991 |
|
RU2085166C1 |
| ШАССИ ДЛЯ ПЕРЕДВИЖЕНИЯ ПО РАЗЛИЧНЫМ ОПОРНЫМ ПОВЕРХНОСТЯМ С КОЛЕСНО-ШАГОВЫМИ ДВИЖИТЕЛЯМИ | 2015 |
|
RU2628285C2 |
| Шасси кресла-коляски Н.П. Дядченко | 2020 |
|
RU2737977C1 |
| Модуль колёсно-гусеничного движителя и шасси с двумя модулями | 2022 |
|
RU2784225C1 |
| Шасси кресла-коляски | 2020 |
|
RU2747059C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО С КОЛЕСНО-ШАГАЮЩИМИ ДВИЖИТЕЛЯМИ М.И.ЛОВЧИКОВА | 1992 |
|
RU2031040C1 |
| ГУСЕНИЧНЫЙ ДВИЖИТЕЛЬ ТРАНСПОРТНОГО СРЕДСТВА ДЛЯ ПРЕОДОЛЕНИЯ ЭСКАРПА, КОНТРЭСКАРПА И ЛЕСТНИЧНЫХ МАРШЕЙ | 2011 |
|
RU2472662C1 |
| СТАБИЛИЗАТОР КУРСА ДВИЖЕНИЯ ШАССИ ТРАНСПОРТНОГО СРЕДСТВА ПО СТУПЕНЯМ | 2013 |
|
RU2538653C1 |
| ТРАНСФОРМИРУЕМОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2002 |
|
RU2217119C1 |
Использование: в транспортном машиностроении, преимущественно для передвижения инвалидных колясок по бездорожью и лестницам. Сущность изобретения: движитель содержит установленные на приводном валу 1 внутренние звенья 3,4 с возможностью поворота, содержащие на концах шарнирно закрепленные наружные звенья 6, причем каждое наружное звено, представляющее собой опорный башмак, ... л .. :.-. А связано средней частью шарнирно с тягой 7, другой конец которой также шарнирно соединен с соседним внутренним звеном. На валу 1 между звеньями 3,4 закреплен фланец с радиальным пазом, внутренние звенья имеют цилиндрические полости, а сателлит выполнен в виде рычага с шаровыми поверхностями на концах и в середине и размещен соответственно в цилиндрической полости каждого эвена 3,4 и радиальном пазу фланца. При вращении приводного вала крутящий момент распределяется между звеньями 3,4 и движитель ввиду различных моментов сопротивления вращению этих звеньев, зависящих от положения относительно опорной поверхности, попеременно реализует колесную и шаговую фазы движения, что существенно повышает его проходимость. 1 з.п.ф-лы. б ил. у Ј
| СПОСОБ УПРАВЛЕНИЯ ПРОЦЕССОМ ПОЛУЧЕНИЯ ДИОКСИДА ХЛОРА | 2001 |
|
RU2292298C2 |
| Держатель для поленьев при винтовом колуне | 1920 |
|
SU305A1 |
