Предлагаемое изобретение относится к области военной техники, в частности к оптико-электронным системам наведения, включающим тепловизионный (ТПВ) прибор, автомат сопровождения цели, вычислительную систему, зенитную управляемую ракету, оборудование для передачи команд управления на ракету, и может быть использовано в зенитно-ракетных комплексах с командной системой наведения.
Важнейшей задачей, решаемой в процессе разработки подобных комплексов, является повышение точности наведения ракеты на цель. Это особенно важно с учетом того, что чаще всего для определения координат цели и определения координат ракеты используются разные оптические устройства. Рассогласование между оптическими осями этих устройств практически невозможно устранить при сборке, и к тому же величина этого рассогласования может значительно меняться в процессе эксплуатации комплекса из-за внешних температурных или механических воздействий.
Наиболее близким к предлагаемому является известный способ [1] наведения ракеты, включающий сопровождение цели и измерение ее координат ТПВ системой относительно центра ТПВ растра, пуск ракеты и отсчет текущего времени t от момента ее схода, захват, сопровождение и измерение координат ракеты инфракрасным (ИК) пеленгатором, определение отклонения ракеты от цели с учетом величины рассогласования осей δαз ТПВ системы и ИК-пеленгатора, хранящейся в памяти, выработку и передачу команд управления на ракету, причем после определения отклонений ракеты от цели сравнивают их с размером ТПВ растра, и при отклонении ракеты от цели не более половины размера ТПВ растра выдают в ТПВ систему целеуказание о координатах ракеты, измеренных ИК-пеленгатором, затем захватывают, сопровождают и измеряют координаты ракеты ТПВ системой, после чего определяют величину рассогласования δα* между координатами ракеты, измеренными ТПВ системой и ИК-пеленгатором, в течение определенного интервала времени вырабатывают, запоминают математическое ожидание δαу этой величины и одновременно фиксируют момент времени tюс относительно момента схода ракеты, а затем на интервале времени τюс≤1 с определяют окончательное рассогласование осей ТПВ системы и ИК-пеленгатора путем корректировки хранящейся в памяти величины рассогласования, учитывают его в определении отклонения ракеты от цели и команд управления на ракету и запоминают для использования в последующих пусках ракет.
Наиболее близкой к предлагаемой является известная оптико-электронная командная система наведения [1], содержащая инфракрасный (ИК) пеленгатор, ТПВ систему, включающую ТПВ прибор, выполненный с возможностью приема теплового сигнала от цели и от ракеты, и телеавтомат сопровождения цели, вход которого соединен с видео выходом ТПВ прибора, передатчик-шифратор, пульт пуска, вычислительную систему, содержащую первый регистр памяти, блок определения отклонения ракеты от цели и команд управления, первый и второй входы которого соединены с соответствующими выходами телеавтомата сопровождения цели, третий и четвертый входы - с первым и вторым выходами ИК-пеленгатора, первый выход блока определения отклонения ракеты от цели и команд управления подключен к входу передатчика-шифратора, таймер, вход которого соединен с выходом пульта пуска, а выход подключен к временным входам ТПВ прибора, телеавтомата цели и ИК-пеленгатора и блока определения отклонения ракеты от цели и команд управления, бортовую аппаратуру ракеты, содержащую органы управления перегрузками ракеты, приемник-дешифратор, вход которого выполнен с возможностью связи с выходом передатчика, и ответчик, выход которого выполнен с возможностью связи с входом ИК-пеленгатора, а выход приемника-дешифратора соединен с органами управления перегрузками ракеты, причем, что в вычислительную систему введены второй регистр памяти, блок коррекции рассогласования осей ТПВ системы и ИК-пеленгатора, первое пороговое устройство, первая и вторая схемы И, схема И-НЕ, переключатель, счетчик, блок выработки рассогласования осей ТПВ системы и ИК-пеленгатора, включающий последовательно соединенные первую схему разности, сумматор с делителем, вторую схему разности, второй вход которой соединен с выходом первой схемы разности, и второе пороговое устройство, в ТПВ систему введен телеавтомат сопровождения ракеты, первый вход которого соединен с видео выходом ТПВ прибора, а второй вход телеавтомата сопровождения ракеты и второй вход первой схемы разности соединены с первым выходом ИК-пеленгатора, при этом первый выход телеавтомата сопровождения ракеты соединен с первым входом первой схемы разности, третий вход которой соединен с выходом первой схемы И, первый и второй входы которой соединены соответственно с вторым выходом телеавтомата сопровождения ракеты и вторым выходом ИК-пеленгатора, который одновременно подключен к второму входу второй схемы И, первый вход которой соединен с выходом первого порогового устройства, вход которого подсоединен к второму выходу блока определения отклонения ракеты от цели и команд управления, пятый вход которого подключен к выходу переключателя, при этом первый управляемый вход переключателя и первый вход блока коррекции рассогласования осей ТПВ системы и ИК-пеленгатора подсоединены к выходу первого регистра памяти, а второй управляемый вход переключателя и сигнальный вход первого регистра памяти соединены с выходом блока коррекции рассогласования осей ТПВ системы и ИК-пеленгатора, второй вход которого соединен с выходом второго регистра памяти, сигнальный вход которого подключен к выходу сумматора с делителем, причем управляющие входы сумматора с делителем, переключателя, первого и второго регистров памяти, блока коррекции рассогласования осей ТПВ системы и ИК-пеленгатора, счетчика и первый вход схемы И-НЕ соединены с выходом второго порогового устройства, а выход второй схемы И соединен с вторым входом схемы И-НЕ, выход которой подключен к третьим входам телеавтомата ракеты и первой схемы И, при этом временные входы телеавтомата сопровождения ракеты, блока коррекции рассогласования осей ТПВ системы и ИК-пеленгатора, блока выработки рассогласования осей ТПВ системы и ИК-пеленгатора, счетчика соединены с выходом таймера, а первый и второй выходы счетчика подключены раздельно к третьему и четвертому входам блока коррекции рассогласования осей ТПВ системы и ИК-пеленгатора.
Недостаток известного способа состоит в том, что захват ракеты ТПВ системой выполняется только при подлете ракеты к цели, поскольку выдача в ТПВ систему целеуказания происходит при отклонении ракеты от цели не более половины размера ТПВ растра. При подлете ракеты к цели, т.е. на конечном участке полета ракеты, расстояние между ТПВ системой и ракетой как правило максимально, следовательно угловой размер изображения ракеты на ТПВ растре минимален, в результате чего процесс захвата ракеты ТПВ системой значительно усложняется, процесс сопровождения ракеты ТПВ системой становится менее устойчивым и, как следствие, снижается точность измерения координат ракеты ТПВ системой, в особенности при наличии в пределах ТПВ растра различных оптических помех (облака, дымовой шлейф ракеты, ложные тепловые цели и т.п.). В результате снижается точность определения величины рассогласования между координатами ракеты, измеренными ТПВ системой и ИК пеленгатором, и в целом снижается точность наведения ракеты на цель.
Недостатком известной оптико-электронной командной системы наведения является наличие в ее составе прецизионного оптико-механического устройства - ИК-пеленгатора, что ведет к усложнению конструкции, увеличению габаритов и массы, удорожанию системы.
Задачей изобретения является повышение точности наведения ракеты на цель путем измерения координат ракеты только ТПВ системой на протяжении всего полетного времени ракеты, а также повышение технологичности изготовления оптико-электронной системы, уменьшение ее габаритов и массы путем исключения из ее состава ИК-пеленгатора.
Поставленная задача достигается тем, что в способе наведения ракеты, включающем сопровождение цели и измерение ее координат ТПВ системой относительно центра ТПВ растра, пуск ракеты и отсчет текущего времени t от момента ее схода, захват, сопровождение и измерение координат ракеты ТПВ системой относительно центра ТПВ растра, определение отклонения ракеты от цели, выработку и передачу команд управления на ракету, захват ракеты ТПВ системой выполняют при каждом появлении ракеты в пределах ТПВ растра, а сопровождение и измерение координат ракеты ТПВ системой выполняют всегда при наличии ракеты в пределах ТПВ растра. Поставленная задача достигается также тем, что захват и сопровождение ракеты ТПВ системой выполняется одновременно с приходом сигнала с ответчика ракеты. Поставленная задача достигается также тем, что ТПВ система имеет возможность приема сигнала нескольких спектральных диапазонов длин волн, включая видимый.
Сущность изобретения состоит в том, что измерение координат ракеты и координат цели производится одной и той же ТПВ системой на протяжении всего полетного времени ракеты, поэтому отсутствует рассогласование между системами отсчета, в которых измеряются координаты ракеты и координаты цели.
Работа по предлагаемому способу осуществляется следующим образом. Производится захват цели, ее сопровождение и измерение ее координат αц ТПВ системой. В подтверждение сопровождения цели ТПВ системой вырабатывается логический сигнал Fц. Производится пуск ракеты, с момента ее схода производится отсчет текущего времени t. При сопровождении цели ТПВ растр анализируется на предмет появления в его пределах изображения ракеты. В случае появления изображения ракеты в пределах ТПВ растра производится захват ракеты, после чего начинается ее сопровождение и измерение ее координат αр ТПВ системой. В подтверждение сопровождения ракеты ТПВ системой вырабатывается логический сигнал Fp. Таким образом, сопровождение и измерение координат цели и ракеты ТПВ системой выполняется одновременно. При одновременном наличии логических сигналов подтверждения сопровождения ТПВ системой цели Fц и ракеты Fp определяют отклонение ракеты от цели по формуле
αк(t)=αц(t) - αр(t),
вырабатывают команды управления ракетой по формуле
K(t)=αк(t)Dp(t)Kк,
где Dp(t) - программная дальность до ракеты, Kк - коэффициент контура управления ракеты, передают команды управления K(t) на ракету.
В предлагаемом способе отсутствует рассогласование между системами, которыми производится измерение координат ракеты и координат цели, поскольку измерение координат ракеты и координат цели производится только ТПВ системой, что способствует повышению точности наведения ракеты на цель.
Работа по первому варианту предлагаемого способа осуществляется следующим образом. Производится захват цели, ее сопровождение и измерение ее координат αц ТПВ системой. В подтверждение сопровождения цели ТПВ системой вырабатывается логический сигнал Fц. Производится пуск ракеты, с момента ее схода производится отсчет текущего времени t. До момента появления изображения ракеты в пределах ТПВ растра на ракету передают программные команды управления K0. Время передачи команд управления на ракету определяется как Dp(t)/c, где с - скорость распространения электромагнитных волн. Время передачи сигнала ответчика ракеты на ТПВ систему определяется аналогично как Dp(t)/c. Общее время от начала передачи команд управления до прихода сигнала ответчика ракеты на ТПВ систему составляет  где Тз - известная постоянная задержка, которая определяется быстродействием приемника-дешифратора и ответчика.
где Тз - известная постоянная задержка, которая определяется быстродействием приемника-дешифратора и ответчика.
В варианте предлагаемого способа ТПВ растр анализируется на предмет появления в его пределах изображения ракеты только в течение временного промежутка от момента времени  до момента времени
до момента времени 
 от начала передачи команд управления, где Тотв - время работы ответчика. Это позволяет повысить помехоустойчивость процесса захвата и сопровождения ракеты ТПВ системой. При появлении изображения ракеты в пределах ТПВ растра производится захват ракеты, после чего начинается ее сопровождение и измерение ее координат αp(t) ТПВ системой. В подтверждение сопровождения ракеты ТПВ системой вырабатывается логический сигнал Fp(t). При одновременном наличии логических сигналов подтверждения сопровождения ТПВ системой цели Fц и ракеты Fp определяют отклонение ракеты от цели по формуле
от начала передачи команд управления, где Тотв - время работы ответчика. Это позволяет повысить помехоустойчивость процесса захвата и сопровождения ракеты ТПВ системой. При появлении изображения ракеты в пределах ТПВ растра производится захват ракеты, после чего начинается ее сопровождение и измерение ее координат αp(t) ТПВ системой. В подтверждение сопровождения ракеты ТПВ системой вырабатывается логический сигнал Fp(t). При одновременном наличии логических сигналов подтверждения сопровождения ТПВ системой цели Fц и ракеты Fp определяют отклонение ракеты от цели по формуле
αк(t)=αц(t) - αp(t),
вырабатывают команды управления ракетой по формуле
K(t)=αк(t)Dp(t)Kк,
где Dp(t) - программная дальность до ракеты, Kк - коэффициент контура управления ракеты, передают команды управления K(t) на ракету.
В предлагаемом варианте способа захват и сопровождение ракеты ТПВ системой выполняется одновременно с приходом сигнала с ответчика ракеты, что способствует большей помехозащищенности процесса захвата и сопровождения ракеты ТПВ системой и, как следствие, повышению точности наведения ракеты на цель. Работа по второму варианту предлагаемого способа осуществляется аналогично. ТПВ система принимает сигнал нескольких спектральных диапазонов длин волн, включая видимый, что способствует более надежному обнаружению целей с малым тепловым контрастом и более устойчивому их сопровождению ТПВ системой, и, как следствие, повышению точности наведения ракеты на цель.
Предлагаемый способ реализован в оптико-электронной командной системе наведения, содержащей ТПВ систему с ТПВ прибором, телеавтоматом сопровождения цели и телеавтоматом сопровождения ракеты, передатчик-шифратор, пульт пуска, вычислительную систему, имеющую в составе блок выработки отклонений ракеты от цели и команд управления, зенитную управляемую ракету, содержащую приемник-дешифратор, органы управления перегрузками ракеты, ответчик.
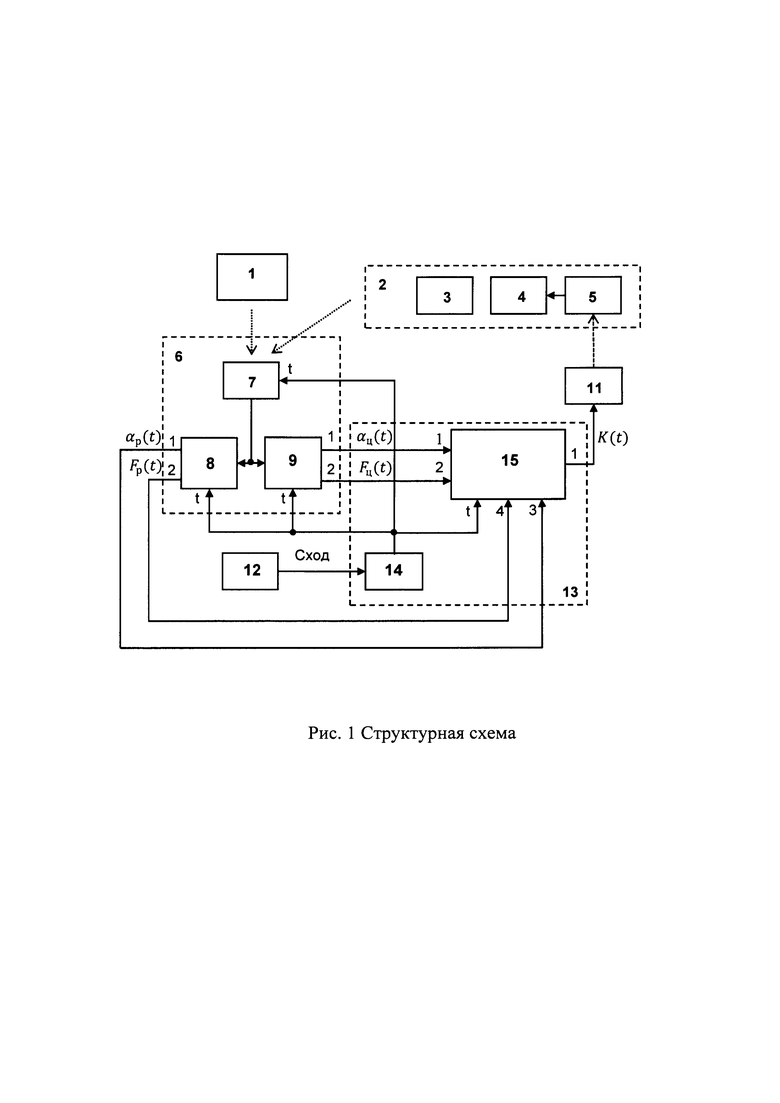
Изобретение поясняется структурной схемой, на которой обозначены:
1 - цель,
2 - зенитная управляемая ракета,
3 - ответчик,
4 - органы управления перегрузками ракеты,
5 - приемник-дешифратор,
6 - ТПВ система,
7 - ТПВ прибор,
8 - телеавтомат сопровождения ракеты,
9 - телеавтомат сопровождения цели,
11 - передатчик-шифратор,
12 - пульт пуска,
13 - цифровая вычислительная система,
14 - таймер,
15 - блок выработки отклонений ракеты от цели и команд управления,
Fц(t) - признак наличия координат цели,
Fp(t) - признак наличия координат ракеты,
αц(t) - координаты цели,
αp(t) - координаты ракеты,
t - текущее время, отсчитываемое от момента схода ракеты,
K(t) - команды управления ракетой.
ТПВ прибор представляет собой скоростную камеру на основе охлаждаемого матричного фотоприемника высокого разрешения [2] и объектива с переключаемыми полями зрения, позволяющими наблюдать ракету с момента времени после ее схода, соответствующему началу управления. ТПВ прибор выдает цифровое видеоизображение посредством интерфейса типа Ethernet. Временной вход ТПВ прибора соединен с выходом таймера.
Телеавтомат сопровождения цели (ТА-Ц) представляет собой специализированную быстродействующую вычислительную систему обработки цифрового видеоизображения, поступающего через интерфейс типа Ethernet из ТПВ прибора, реализующую корреляционно-траекторный алгоритм захвата, сопровождения и определения координат цели относительно центра ТПВ растра. Вход ТА-Ц соединен с выходом ТПВ прибора. Временной вход ТА-Ц соединен с выходом таймера.
Телеавтомат сопровождения ракеты (ТА-Р) представляет собой специализированную быстродействующую вычислительную систему обработки цифрового видеоизображения, поступающего через интерфейс типа Ethernet из ТПВ прибора, реализующую траекторно-контрастный алгоритм захвата ракеты при каждом появлении ракеты в пределах ТПВ растра, сопровождения и измерения координат ракеты относительно центра ТПВ растра всегда при наличии ракеты в пределах ТПВ растра. Вход ТА-Р соединен с выходом ТПВ прибора. Временной вход ТА-Р соединен с выходом таймера.
Первый и второй выходы ТА-Ц соединены соответственно с первым и вторым входами блока выработки отклонения ракеты от цели и команд управления. Первый и второй выходы ТА-Р соединены соответственно с третьим и четвертым входами блока выработки отклонения ракеты от цели и команд управления.
ТПВ прибор может быть реализован на основе охлаждаемого матричного фотоприемника семейства ФЭМ16М [3] и программируемой логической интегральной схемы (ПЛИС) [4]. ТА-Р и ТА-Ц могут быть реализованы также на основе ПЛИС или на основе специализированных процессоров обработки сигналов, например, 1967 ВН028 [5].
Передатчик-шифратор, пульт пуска, цифровая вычислительная система с таймером и блоком выработки отклонения ракеты от цели и команд управления, ракета с приемником-дешифратором, ответчиком и органами управления перегрузками ракеты, являются известными системами с известным образом организованными связями, как указано в [1].
Работа по предлагаемой оптико-электронной командной системе наведения осуществляется следующим образом.
Производится обзор фоно-целевой обстановки (ФЦО) ТПВ системой 6. ТПВ прибор 7, принимая сигнал ФЦО, преобразует его в цифровое видеоизображение и выдает цифровое видеоизображение через интерфейс типа Ethernet в ТА-Ц 9 и в ТА-Р 8. ТА-Ц анализирует цифровое видеоизображение и на основе корреляционных и траекторных критериев изображения цели 1 производит захват цели, ее сопровождение и измерение ее координат αц. При сопровождении цели ТА-Ц вырабатывает логический сигнал Fц. Координаты αц и логический сигнал выдаются в блок выработки отклонения ракеты от цели и команд управления 15. С пульта 12 производится пуск ракеты 2, с момента ее схода производится отсчет текущего времени г таймером 14. ТА-Р анализирует цифровое видеоизображение ФЦО, поступающее из ТПВ прибора, в течение временного промежутка от момента времени  до момента времени
до момента времени  от начала передачи предыдущей посылки команд управления передатчиком-шифратором 11. На основе траекторных и контрастных признаков изображения ракеты ТА-Р производит захват ракеты при каждом ее появлении на видеоизображении ФЦО, сопровождение и измерение ее координат αр всегда при ее наличии на видеоизображении ФЦО. При сопровождении ракеты ТА-Р вырабатывает логический сигнал Fp. Координаты αр и логический сигнал Fp выдаются в блок выработки отклонения ракеты от цели и команд управления. При одновременном наличии логических сигналов Fц и Fр блок выработки отклонения ракеты от цели и команд управления вычисляет отклонение ракеты от цели по формуле
от начала передачи предыдущей посылки команд управления передатчиком-шифратором 11. На основе траекторных и контрастных признаков изображения ракеты ТА-Р производит захват ракеты при каждом ее появлении на видеоизображении ФЦО, сопровождение и измерение ее координат αр всегда при ее наличии на видеоизображении ФЦО. При сопровождении ракеты ТА-Р вырабатывает логический сигнал Fp. Координаты αр и логический сигнал Fp выдаются в блок выработки отклонения ракеты от цели и команд управления. При одновременном наличии логических сигналов Fц и Fр блок выработки отклонения ракеты от цели и команд управления вычисляет отклонение ракеты от цели по формуле
αк(t)=αц(t) - αр(t),
и вырабатывает команды управления ракетой по формуле
K(t)=αк(t)Dр(t)Kк
где Dp(t) - программная дальность до ракеты, Kк - коэффициент контура управления ракеты, после чего команды управления K(t) поступают в передатчик-шифратор 11 и далее на ракету, где дешифрируются приемником-дешифратором 5 и передаются на органы управления перегрузками ракеты 4, в результате чего ракета сближается с целью. При отсутствии сигнала Fp блок выработки отклонения ракеты от цели и команд управления формирует на выходе программные команды управления K0, обеспечивающие полет ракеты без отклонений по курсу и тангажу.
В предлагаемой оптико-электронной командной системе наведения функции ИК-пеленгатора реализованы с помощью ТПВ системы (ТПВ прибора и ТА-Р). Это позволяет исключить ИК-пеленгатор - прецизионное оптико-механическое устройство - из оптико-электронной командной системы наведения и, тем самым, упростить конструкцию системы наведения, уменьшить ее габариты и массу, снизить ее стоимость. По этой же причине в предлагаемой системе наведения в принципе отсутствует рассогласование между системами, которыми производится измерение координат ракеты и координат цели, поскольку измерение координат ракеты и координат цели производится только ТПВ системой, что способствует повышению точности наведения ракеты на цель.
На основе предлагаемых решений была разработана оптико-электронная система наведения, изготовлены ее опытные образцы, успешно пройдены испытания с пусками управляемых ракет, подтвердившими предлагаемые решения, конструкторской документации присвоена литера O1.
1. СПОСОБ НАВЕДЕНИЯ РАКЕТЫ И ОПТИКО-ЭЛЕКТРОННАЯ КОМАНДНАЯ СИСТЕМА НАВЕДЕНИЯ. RU 2288424 C1. F41G 7/20. 27.11.2006.
2. Курбатов Л.Н. Оптоэлектроника видимого и инфракрасного диапазонов спектра. - М.: Физматкнига, 2013. - 400 с.
3. Патрашин А.И. и др. Метод измерения квантовой эффективности и темнового тока в матричных ФПУ // Прикладная физика, 2013, №6. - С. 5-10.
4. Соловьев В.В. Проектирование цифровых систем на основе программируемых логических интегральных схем. - М.: Горячая линия - телеком, 2007. - 636 с.
5. Мякочин Ю. 32-разрядный суперскалярный DSP-процессор с плавающей точкой // Компоненты и технологии, 2013, №7. - С. 98-100.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ НАВЕДЕНИЯ РАКЕТЫ И ОПТИКО-ЭЛЕКТРОННАЯ КОМАНДНАЯ СИСТЕМА НАВЕДЕНИЯ | 2005 |
|
RU2288424C1 |
| ЗЕНИТНЫЙ РАКЕТНО-ПУШЕЧНЫЙ КОМПЛЕКС | 1998 |
|
RU2131577C1 |
| ОПТИКО-ЭЛЕКТРОННАЯ СИСТЕМА ЗЕНИТНОГО РАКЕТНОГО КОМПЛЕКСА | 1999 |
|
RU2165582C2 |
| ОПТИКО-ЭЛЕКТРОННАЯ СИСТЕМА ЗЕНИТНОГО РАКЕТНОГО КОМПЛЕКСА | 2010 |
|
RU2433370C1 |
| Способ юстировки информационных средств зенитной боевой машины и устройство для юстировки информационных средств зенитной боевой машины | 2017 |
|
RU2670242C1 |
| ЗЕНИТНЫЙ РАКЕТНО-ПУШЕЧНЫЙ КОМПЛЕКС | 2006 |
|
RU2321818C1 |
| ЗЕНИТНЫЙ РАКЕТНЫЙ КОМПЛЕКС | 2010 |
|
RU2442942C1 |
| СПОСОБ ПРИЦЕЛИВАНИЯ И НАВЕДЕНИЯ УПРАВЛЯЕМЫХ ОБЪЕКТОВ | 2009 |
|
RU2413159C1 |
| СИСТЕМА НАВЕДЕНИЯ ЗЕНИТНЫХ УПРАВЛЯЕМЫХ РАКЕТ БЛИЖНЕГО ДЕЙСТВИЯ | 2006 |
|
RU2324139C1 |
| Зенитный ракетный комплекс | 2017 |
|
RU2651533C1 |
Изобретение относится к области военной техники и касается способа наведения ракеты. Способ включает в себя сопровождение цели и измерение ее координат тепловизионной системой относительно центра тепловизионного растра, пуск ракеты и отсчет текущего времени t от момента ее схода, захват, сопровождение и измерение координат ракеты тепловизионной системой относительно центра тепловизионного растра, определение отклонения ракеты от цели, выработку и передачу команд управления на ракету. Захват ракеты тепловизионной системой выполняется при каждом появлении ракеты в пределах тепловизионного растра, а сопровождение и измерение координат ракеты тепловизионной системой выполняется всегда при наличии ракеты в пределах тепловизионного растра. Технический результат заключается в повышении точности наведения ракеты. 2 н. и 2 з.п. ф-лы, 1 ил.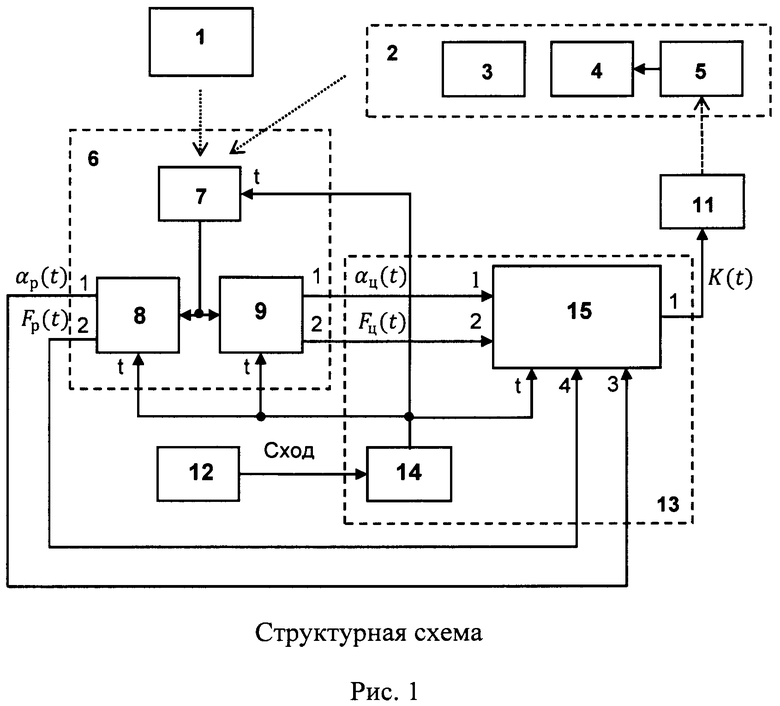
1. Способ наведения ракеты, включающий сопровождение цели и измерение ее координат тепловизионной системой относительно центра тепловизионного растра, пуск ракеты и отсчет текущего времени t от момента ее схода, захват, сопровождение и измерение координат ракеты тепловизионной системой относительно центра тепловизионного растра, определение отклонения ракеты от цели, выработку и передачу команд управления на ракету, отличающийся тем, что захват ракеты тепловизионной системой выполняется при каждом появлении ракеты в пределах тепловизионного растра, а сопровождение и измерение координат ракеты тепловизионной системой выполняется всегда при наличии ракеты в пределах тепловизионного растра.
2. Способ по п. 1, отличающийся тем, что захват и сопровождение ракеты тепловизионной системой выполняется одновременно с приходом сигнала с ответчика ракеты.
3. Способ по п. 1, отличающийся тем, что тепловизионная система имеет возможность приема сигнала нескольких спектральных диапазонов длин волн, включая видимый.
4. Оптико-электронная командная система наведения, содержащая тепловизионную систему, включающую тепловизионный прибор, выполненный с возможностью приема теплового сигнала от цели и от ракеты, телеавтомат сопровождения цели, вход которого соединен с видеовыходом тепловизионного прибора, и телеавтомат сопровождения ракеты, вход которого соединен с видеовыходом тепловизионного прибора, пульт пуска, передатчик-шифратор, вычислительную систему, содержащую блок выработки отклонения ракеты от цели и команд управления, первый выход которого подключен к входу передатчика-шифратора, а первый и второй входы соединены соответственно с первым и вторым выходами телеавтомата сопровождения цели, и таймер, вход которого соединен с выходом пульта пуска, бортовую аппаратуру ракеты, содержащую органы управления перегрузками ракеты, приемник-дешифратор, вход которого выполнен с возможностью связи с выходом передатчика, ответчик, выход которого выполнен с возможностью связи с входом тепловизионного прибора, а выход приемника-дешифратора соединен с органами управления перегрузками ракеты, при этом временные входы тепловизионного прибора, телеавтомата сопровождения цели, телеавтомата сопровождения ракеты, блока выработки отклонения ракеты от цели и команд управления соединены с выходом таймера, отличающаяся тем, что третий и четвертый входы блока выработки отклонения ракеты от цели и команд управления соединены соответственно с первым и вторым выходами телеавтомата сопровождения ракеты, а телеавтомат сопровождения ракеты выполнен с возможностью захвата ракеты при каждом появлении ракеты в пределах тепловизионного растра, а также с возможностью сопровождения и измерения координат ракеты всегда при наличии ракеты в пределах тепловизионного растра.
| СПОСОБ НАВЕДЕНИЯ РАКЕТЫ И ОПТИКО-ЭЛЕКТРОННАЯ КОМАНДНАЯ СИСТЕМА НАВЕДЕНИЯ | 2005 |
|
RU2288424C1 |
| ЗЕНИТНЫЙ РАКЕТНО-ПУШЕЧНЫЙ КОМПЛЕКС | 1998 |
|
RU2131577C1 |
| US 4611771 A1, 16.09.1986 | |||
| JP 2016161194 A, 05.09.2016. | |||

