Предлагаемое изобретение относится к области военной техники, в частности к зенитным самоходным установкам с системами наведения, содержащими оптико-электронные средства обнаружения, сопровождения цели и ракеты, радиолокационные средства для передачи команд на ракету, вычислительную систему, зенитную управляемую ракету (ЗУР). К числу наиболее важных проблем, связанных с созданием таких комплексов, в последнее время относится проблема обеспечения эффективного использования ЗУР с командной системой наведения как наиболее дешевой на больших дальностях.
Известен способ наведения ракеты (А.А.Лебедев и В.А.Карабанов. Динамика систем управления беспилотными летательными аппаратами. М.: Машиностроение, 1965 г., с.с.29, 328, 379-380) [1], в котором определяют координаты цели и ракеты, по которым определяют отклонения ракеты от цели. После этого формируют команды наведения, которые передают на ракету.
В результате сравнения измеренных координат ракеты с координатами цели определяется отклонение ракеты от цели. Так как такой метод наведения обеспечивает непрерывное сближение ракеты с целью, то величину отклонения ракеты от цели определяют путем сравнения угловых координат ракеты и угловых координат цели, определенных для текущего момента времени.
Но при больших расстояниях ракеты от системы наведения даже небольшим угловым отклонениям ракеты от цели могут соответствовать большие линейные отклонения. Если учесть, что точность наведения ракеты на цель определяется тем минимальным расстоянием между центром цели и ракетой, которое может быть достигнуто в процессе наведения, то очевидно, что за ошибку наведения, на основании которой формируется команда управления, принято линейное отклонение ракеты от траектории цели. Это линейное отклонение равно произведению угловых отклонений на расстояние между ракетой и системой наведения. После определения отклонения ракеты от цели формируется команда, пропорциональная отклонению ракеты от цели. Приведенный метод наведения ракеты реализован в командной системе наведения, в которой координаты цели и ракеты определяются в координатах пункта управления (см. А.А.Лебедев и В.А.Карабанов. Динамика систем управления беспилотными летательными аппаратами. М.: Машиностроение, 1965 г., с.30) [1].
Система наведения содержит координатор цели, координатор ракеты, устройство выработки команд и шифратор-передатчик, располагаемые на пункте управления. На ракете имеется приемник, дешифратор, выход которого соединен с органами управления перегрузками ракеты, ракета содержит также ответчик. На пункте управления координатор ракеты измеряет и определяет координаты ракеты и передает их в устройство выработки команд, координатор цели сопровождает и измеряет координаты цели, которые передает также в устройство выработки команд. Устройство выработки команд представляет собой вычислительную систему, которая вычисляет отклонения ракеты относительно цели, по которым вычисляет команды управления, передаваемые на борт ракеты передатчиком. Эти команды управляют движением ракеты для совмещения с линией визирования цели. Для измерения координат ракеты и цели используют два различных измерителя координат, построенных на разных принципах.
При наведении ЗУР по указанному методу, в котором координаты цели и ЗУР определяются в осях, связанных с приборами наведения, для правильного выполнения команд, передаваемых на ракету, необходимо обеспечить совпадение осей измерительного прибора координат цели и измерительного прибора координат ракеты с высокой точностью. Так как измерение координат цели и ЗУР производится разными приборами, то величины ошибок рассогласования осей между этими измерительными приборами могут достигать значительных величин (до 1-2 мрад), что на дальностях более 10 км приводит к большим ошибкам наведения ракеты и недопустимым промахам относительно цели.
Известен также командный способ наведения ракеты в зенитном ракетном комплексе ADAMS (см. Forecast International/DMS Market Intelligence Report, Missile Forecast, ADAMS, April 1998, pp.1-4) [2], в котором для наведения ЗУР по линии визирования используется электрооптический канал. Способ аналогичен описанному выше и при его применении за счет несогласованности осей измерителей координат цели и ЗУР в условиях эксплуатации получают значительные промахи ЗУР относительно цели.
Известна оптико-электронная система (ОЭС) комплекса Jernas (см. Jane's Land -Based air defense, Tenth Edition 1997-98, p.p.293-297) [3], в которой применен метод командного наведения ракеты по линии визирования с использованием оптического прибора и передатчика команд с антенной. В состав оптического прибора входят: сферический корпус, в котором размещены тепловизионная камера с телеавтоматом сопровождения цели и ИК-пеленгатор захвата и пеленгации ракеты. Антенна передачи команд на ракету в данной системе размещена на своем основании и установлена на корпусе боевого модуля. Размещение в едином корпусе тепловизионной камеры и ИК-пеленгатора в условиях эксплуатации при различных вибрациях и температурах приводит к изгибу силового корпуса и смещению осей приборов относительно друг друга. Это не позволяет обеспечить высокую точность согласования осей тепловизионной камеры и ИК-пеленгатора, приводит к ошибкам наведения ракеты и снижению эффективности комплекса.
Наиболее близкими по своей сущности к изобретению являются способ и оптико-электронная система наведения ЗУР, используемые в ЗРПК по патенту №2131577 РФ от 10.06.99 г. [4]. Способ включает сопровождение и измерение угловых координат цели с помощью тепловизионного прибора (ТПВ) и телеавтомата по тепловому контрасту цели путем удержания цели в центре тепловизионного растра, пуск ракеты, фиксацию момента ее схода, захват, сопровождение и определение инфракрасным (ИК) пеленгатором угловых координат ракеты относительно линии визирования цели, по разности измеренных координат цели и ракеты с учетом рассогласования осей вычисление команд управления ЗУР, которые кодируют в импульсные посылки и передают на ракету. Оптико-электронная система по данному способу содержит тепловизионный прибор, телеавтомат, ИК-пеленгатор, вычислительную систему, в состав которой входит блок выработки команд управления, передатчик, который кодирует команды и передает их на ракету, пульт пуска. Выход ТПВ прибора соединен с входом телеавтомата, который измеряет координаты цели, выходы телеавтомата соединены с первыми входами блока выработки команд управления. Пуск ракеты производится с пульта пуска, с момента схода ракеты измеряется текущее время. ИК-пеленгатор измеряет координаты ракеты после ее схода, и его выходы соединены с вторыми входами блока выработки команд управления. ТПВ прибор и ИК-пеленгатор размещены на одном основании. Блок выработки команд управления вычисляет отклонение ракеты от цели и по этой разности определяет команды управления. Выход блока выработки команд управления соединен с входом передатчика, который кодирует команды управления и передает на борт ракеты. Ракета воспринимает своей аппаратурой эти команды и сближается с целью.
Одним из недостатков изложенного способа наведения ЗУР с использованием оптико-электронной системы наведения по патенту №2131577 РФ от 10.06.99 г. является возникающая в процессе эксплуатации инструментальная погрешность рассогласования оптических осей тепловизионного прибора и ИК-пеленгатора, обусловленная нежесткостью конструкции, изменением установочных размеров за счет температурных и других факторов. Это приводит к ошибкам определения отклонения ракеты от линии визирования цели и недопустимым величинам промаха ракеты относительно цели, что резко снижает эффективность комплекса. Проводимые в процессе испытаний работы по измерению этих рассогласований по юстировочному щиту и вводу поправок в величины рассогласования осей не принесли положительных результатов, так как необходимо было перед каждым пуском вводить корректуру в команды управления, чтобы скомпенсировать промах, возникший за счет рассогласования осей ТПВ системы и ИК-пеленгатора в процессе наведения ракеты на цель. Особенно это сказывается на дальностях более 10 км, величины промахов из-за этой погрешности достигали более 10 м.
Задачей предлагаемого изобретения является повышение эффективности комплекса за счет повышения точности наведения ракеты путем измерения рассогласования осей тепловизионной системы и ИК-пеленгатора в процессе наведения ракеты и учета полученного рассогласования в командах наведения, передаваемых на ракету.
Поставленная задача достигается тем, что в способе наведения ракеты, заключающемся в сопровождении и измерении координат цели тепловизионной (ТПВ) системой относительно центра тепловизионного (ТПВ) растра, пуске ракеты и отсчете текущего времени t от момента ее схода, захвате, сопровождении и измерении координат ракеты инфракрасным (ИК) пеленгатором, выработке отклонения ракеты от цели с учетом величины рассогласования осей δα3 ТПВ системы и ИК-пеленгатора, хранящейся в памяти, выработке и передаче команд управления на ракету, после выработки отклонений ракеты от цели сравнивают их с размером ТПВ растра, и при отклонении ракеты от цели не более половины размера ТПВ растра выдают в ТПВ систему целеуказание о координатах ракеты, измеренных ИК-пеленгатором, затем захватывают, сопровождают и измеряют координаты ракеты ТПВ системой, после чего определяют величину рассогласования δα* между координатами ракеты, измеренными ТПВ системой и ИК-пеленгатором, в течение определенного интервала времени вырабатывают, запоминают математическое ожидание δαу этой величины и одновременно фиксируют момент времени tюс относительно момента схода ракеты, а затем на интервале времени τюс≤1с определяют окончательное рассогласование осей ТПВ системы и ИК-пеленгатора путем корректировки хранящейся в памяти величины рассогласования, учитывают его в выработке отклонения ракеты от цели и команд управления на ракету и запоминают для использования в последующих пусках ракет. При этом корректировку величины рассогласования осей определяют по формуле

Способ реализован в оптико-электронной командной системе наведения, содержащей инфракрасный (ИК) пеленгатор, тепловизионную систему, включающую тепловизионный (ТПВ) прибор, выполненный с возможностью приема теплового сигнала от цели и от ракеты, и телеавтомат сопровождения цели, вход которого соединен с видео выходом ТПВ прибора, передатчик-шифратор, пульт пуска, вычислительную систему, содержащую первый регистр памяти, блок выработки отклонения ракеты от цели и команд управления, первый и второй входы которого соединены с соответствующими выходами телеавтомата сопровождения цели, третий и четвертый входы - с первым и вторым выходами ИК-пеленгатора, первый выход блока выработки отклонения ракеты от цели и команд управления подключен к входу передатчика-шифратора, таймер, вход которого соединен с выходом пульта пуска, а выход подключен к временным входам ТПВ прибора, телеавтомата цели и ИК-пеленгатора и блока выработки отклонения ракеты от цели и команд управления, бортовую аппаратуру ракеты, содержащую органы управления перегрузками ракеты, приемник-дешифратор, вход которого выполнен с возможностью связи с выходом передатчика, и ответчик, выход которого выполнен с возможностью связи с входом ИК-пеленгатора, а выход приемника-дешифратора соединен с органами управления перегрузками ракеты, отличающийся тем, что в вычислительную систему введены второй регистр памяти, блок коррекции рассогласования осей ТПВ системы и ИК-пеленгатора, первое пороговое устройство, первая и вторая схемы И, схема И-НЕ, переключатель, счетчик, блок выработки рассогласования осей ТПВ системы и ИК-пеленгатора, включающий последовательно соединенные первую схему разности, сумматор с делителем, вторую схему разности, второй вход которой соединен с выходом первой схемы разности, и второе пороговое устройство, в тепловизионную систему введен телеавтомат сопровождения ракеты, первый вход которого соединен с видео выходом ТПВ прибора, а второй вход телеавтомата сопровождения ракеты и второй вход первой схемы разности соединены с первым выходом ИК-пеленгатора, при этом первый выход телеавтомата сопровождения ракеты соединен с первым входом первой схемы разности, третий вход которой соединен с выходом первой схемы И, первый и второй входы которой соединены соответственно с вторым выходом телеавтомата сопровождения ракеты и вторым выходом ИК-пеленгатора, который одновременно подключен к второму входу второй схемы И, первый вход которой соединен с выходом первого порогового устройства, вход которого подсоединен к второму выходу блока выработки отклонения ракеты от цели и команд управления, пятый вход которого подключен к выходу переключателя, при этом первый управляемый вход переключателя и первый вход блока коррекции рассогласования осей ТПВ системы и ИК-пеленгатора подсоединены к выходу первого регистра памяти, а второй управляемый вход переключателя и сигнальный вход первого регистра памяти соединены с выходом блока коррекции рассогласования осей ТПВ системы и ИК-пеленгатора, второй вход которого соединен с выходом второго регистра памяти, сигнальный вход которого подключен к выходу сумматора с делителем, причем управляющие входы сумматора с делителем, переключателя, первого и второго регистров памяти, блока коррекции рассогласования осей ТПВ системы и ИК-пеленгатора, счетчика и первый вход схемы И-НЕ соединены с выходом второго порогового устройства, а выход второй схемы И соединен с вторым входом схемы И-НЕ, выход которой подключен к третьим входам телеавтомата ракеты и первой схемы И, при этом временные входы телеавтомата сопровождения ракеты, блока коррекции рассогласования осей ТПВ системы и ИК-пеленгатора, блока выработки рассогласования осей ТПВ системы и ИК-пеленгатора, счетчика соединены с выходом таймера, а первый и второй выходы счетчика подключены раздельно к третьему и четвертому входам блока коррекции рассогласования осей ТПВ системы и ИК-пеленгатора.
Сущность изобретения заключается в том, что после выработки отклонений ракеты от цели и не превышения величины этого отклонения размера тепловизионного растра выдают в ТПВ систему целеуказание о координатах ракеты, измеренных ИК-пеленгатором. ТПВ система захватывает, сопровождает и измеряет координаты ракеты. После этого сравнивают координаты ракеты, измеренные ТПВ системой и ИК-пеленгатором, определяют математическое ожидание рассогласования, запоминают его и плавно корректируют хранящуюся в памяти ранее записанную величину рассогласования между координатами ракеты, измеренными ТПВ системой и ИК-пеленгатором. Это корректируемое значение учитывают в выработке отклонений ракеты от цели и в командах управления ракетой и одновременно обновляют записанное ранее в памяти значение рассогласования на новое для использования в последующих пусках ракет.
Работа по предлагаемому способу осуществляется следующим образом. Производится сопровождение цели и измерение ее координат ТПВ системой αц(t), производится пуск ракеты и с момента схода производится отсчет текущего времени t, захват ракеты на сопровождение и измерение ее координат ИК-пеленгатором  . При наличии информации о координатах и логических сигналах подтверждения сопровождения ТПВ системой цели АСЦ-Т и ИК-пеленгатором ракеты АСР-Т с учетом ранее запомненного и хранящегося в памяти δαз рассогласования осей ТПВ системы и ИК-пеленгатора вырабатывают:
. При наличии информации о координатах и логических сигналах подтверждения сопровождения ТПВ системой цели АСЦ-Т и ИК-пеленгатором ракеты АСР-Т с учетом ранее запомненного и хранящегося в памяти δαз рассогласования осей ТПВ системы и ИК-пеленгатора вырабатывают:
- отклонение ракеты от цели 
- команды управления на ракету 
где Dp - дальность до ракеты, Кк коэффициент по контуру ракеты. После измерения координат ракеты ИК-пеленгатором определяют, находится ли отклонение ракеты в пределах растра ТПВ системы αк(t)≤6 мрад, при выполнении этого условия координаты ракеты, измеренные ИК-пеленгатором, передаются в ТПВ систему и дается разрешение ТПВ системе на захват и сопровождение ракеты. ТПВ система захватывает, сопровождает и измеряет координаты ракеты  . При наличии информации о координатах ракеты и команды АСР-Т подтверждения о ее сопровождении тепловизионной системой определяют отклонения оси ТПВ системы от оси ИК-пеленгатора и его математического ожидания по формулам:
. При наличии информации о координатах ракеты и команды АСР-Т подтверждения о ее сопровождении тепловизионной системой определяют отклонения оси ТПВ системы от оси ИК-пеленгатора и его математического ожидания по формулам:


где n - число тактов вычисления, время одного такта, например, при частоте вычислений 50 Гц составляет 20 мс.
Вычисления производят до выполнения условия:


При выполнении этого условия фиксируют время завершения tюс вычисления математического ожидания от момента схода ракеты и запоминают последнее значение δαy=δαy[n], после чего на интервале длительностью τюс=1 с плавно корректируют величину рассогласования δα3 осей ТПВ системы и ИК-пеленгатора, запомненную ранее и используемую для расчета отклонений ракеты от цели. Корректируемая величина определяется по формуле:

Корректированная величина рассогласования δα(t) осей ТПВ системы и ИК-пеленгатора учитывается в выработке отклонений ракеты от цели и команд управления и одновременно запоминается для учета в последующих пусках ракет.
Такой метод учета рассогласования осей между целью и ракетой позволяет за счет измерения координат ракеты ТПВ системой в процессе наведения ЗУР в течение небольшого интервала времени измерить и скомпенсировать погрешности, возникающие в процессе эксплуатации оптико-электронных систем и приводящие к недопустимым промахам ЗУР относительно цели. Плавная коррекция имеющегося ранее рассогласования, введенного в команды управления ракетой, обеспечивает плавное (без скачков) сближение ракеты с целью, что особенно необходимо при наведении ЗУР, обладающих большими скоростями и перегрузками.
Указанный способ реализован в оптико-электронной командной системе наведения, содержащей тепловизионную систему с ТПВ прибором, телеавтоматом сопровождения цели и телеавтоматом сопровождения ракеты, ИК-пеленгатор, передатчик-шифратор, пульт пуска, вычислительную систему, имеющую в составе блок выработки отклонений ракеты от цели и команд управления, блок выработки рассогласования осей ТПВ системы и ИК-пеленгатора, представляющий собой счетно-решающее устройство, содержащее последовательно соединенные первую схему разности, сумматор с делителем, вторую схему разности и второе пороговое устройство, блок коррекции рассогласования осей ТПВ системы и ИК-пеленгатора, таймер, логические схемы "И", "И-НЕ", первое пороговое устройство, счетчик, два регистра памяти, переключатель, зенитную управляемую ракету, содержащую приемник-дешифратор, органы управления перегрузками ракеты, ответчик. Логические элементы обеспечивают взаимодействие известных и введенных блоков.
Сравнение указанного технического решения с прототипом позволяет установить его соответствие критерию "новизна". Сравнение заявленного технического решения с другими техническими решениями в данном классе МПК не позволило выявить в них признаки, отличающие заявляемое решение от прототипа, что позволяет сделать вывод о соответствии критерию "изобретательский уровень".
Изобретение поясняется чертежом, на котором представлена структурная схема. На схеме приняты следующие обозначения:
1 - цель;
2 - зенитная управляемая ракета;
3 - ответчик;
4 - органы управления перегрузками ракеты,
5 - приемник-дешифратор;
6 - тепловизионная (ТПВ) система;
7 - тепловизионный(ТПВ) прибор;
8 - телеавтомат сопровождения ракеты;
9 - телеавтомат сопровождения цели;
10 - инфракрасный (ИК) пеленгатор;
11 - передатчик-шифратор;
12 - пульт пуска;
13 - цифровая вычислительная система;
14 - первая схема "И";
15 - схема "И-НЕ";
16 - таймер;
17 - блок выработки отклонений ракеты от цели и команд управления;
18 - первое пороговое устройство;
19 - вторая схема "И";
20 - блок выработки рассогласования осей ТПВ системы и ИК-пеленгатора;
21 - первая схема разности;
22 - сумматор с делителем;
23 - вторая схема разности;
24 - второе пороговое устройство;
25 - счетчик;
26 - первый регистр памяти;
27 - переключатель;
28 - второй регистр памяти;
29 - блок коррекции рассогласования осей ТПВ системы и ИК-пеленгатора;
АСЦ-Т - признак наличия координат цели, измеренных телеавтоматом цели;
АСР-К - признак наличия координат, измеренных ИК-пеленгатором;
АСР-Т - признак наличия координат, измеренных телеавтоматом ракеты;
ПрК - признак нахождения ракеты в пределах растра ТПВ системы;
Юст - признак разрешения начала юстировки и захвата ракеты телеавтоматом ракеты;
Юст1 - признак разрешения расчета рассогласования оптических осей ТПВ прибора и ИК-пеленгатора;
Корр -признак начала плавной корректировки рассогласования осей ТПВ системы и ИК-пеленгатора;
t - текущее время, отсчитываемое от момента схода ракеты;
tюс - время от момента схода ракеты до момента появления признака "Корр";
τюс - время, в течение которого производят корректировку величины рассогласования осей ТПВ системы и ИК-пеленгатора;
 - координата ракеты, измеренная ИК-пеленгатором;
- координата ракеты, измеренная ИК-пеленгатором;
 - координата ракеты, измеренная телеавтоматом ракеты;
- координата ракеты, измеренная телеавтоматом ракеты;
αц(t) - координата цели;
αк(t) - отклонения ракеты от цели;
K(t) - команды на ракету;
δαз - рассогласование осей ТПВ системы и ИК-пеленгатора, хранящееся в памяти;
δα* - вычисленное в процессе наведения ЗУР рассогласование между координатами ракеты, измеренными ТПВ системой и ИК-пеленгатором, т.е. измеренное рассогласование осей ТПВ системы и ИК-пеленгатора;
δαy - измеренное в процессе наведения ЗУР и вычисленное математическое ожидание рассогласования ТПВ системой и ИК-пеленгатором;
δαк(t) - откорректированное рассогласование осей ТПВ системы и ИК-пеленгатора с учетом определенного рассогласования в процессе наведения ЗУР;
δα - поправка на рассогласование осей ТПВ прибора и ИК-пеленгатора, вводимая в отклонения ракеты от цели и в команды управления.
ТПВ-система с телеавтоматом сопровождения цели, ИК-пеленгатор сопровождения ракеты, передатчик-дешифратор, пульт пуска, цифровая вычислительная система с таймером, блоком выработки рассогласований на ракету и команд управления, ЗУР с приемником-шифратором, ответчиком и органами управления перегрузками ракеты являются известными системами с известным образом организованными связями, как указано в патенте №2131577.
В тепловизионную систему введен телеавтомат сопровождения ракеты, который аналогичен телеавтомату сопровождения цели и представляет собой быстродействующую специализированную цифровую вычислительную систему, реализующую контрастный алгоритм обработки и определения координат ракеты относительно центра тепловизионного растра на основании видеосигнала, принимаемого с ТПВ прибора. Захват ракеты на сопровождение производится по целеуказанию о координатах ракеты, поступающих с ИК-пеленгатора по команде на захват ракеты. Входы телеавтомата ракеты подключены: первый вход - к видео выходу ТПВ прибора, второй - к первому выходу ИК-пеленгатора, третий - к выходу схемы И-НЕ, подключение временного входа к выходу таймера обеспечивает измерение координат ракеты в едином времени со всеми устройствами. Выходы телеавтомата ракеты подключены: первый - к первому входу первой схемы разности блока выработки математического ожидания рассогласования осей ТПВ системы и ИК-пеленгатора; второй - к первому входу первой схемы И.
Первое пороговое устройство определяет, находится ли ракета в тепловизионном растре, и при выполнении условия, что отклонение ракеты от цели αк(t)≤6 мрад, выдает признак "ПрК". Вход первого порогового устройства подключен к второму выходу блока выработки отклонений ракеты от цели и команд управления, а его выход соединен с первым входом второй схемы И, второй вход которой соединен с вторым выходом ИК-пеленгатора.
Блок выработки рассогласования осей ТПВ системы и ИК-пеленгатора представляет цифровое вычислительное устройство, в состав которого входят последовательно соединенные первая схема разности, сумматор с делителем, вторая схема разности и второе пороговое устройство. Первая схема разности выполняет алгоритм формулы (3). Сумматор с делителем вычисляют значение математического ожидания по формулам (4) до тех пор, пока на его управляющий вход не поступит сигнал с выхода порогового устройства. Выход сумматора с делителем через второй регистр памяти подключен к второму входу блока коррекции рассогласования осей ТПВ системы и ИК-пеленгатора. Вторая схема разности вычисляет ошибку определения математического ожидания рассогласования осей. Второе пороговое устройство срабатывает при условии, что величина составляющей ошибки измерения математического ожидания рассогласования осей не превышает 0,01 мрад. На его выходе формируется команда "Корр" разрешения проведения коррекции величины рассогласования осей. Выход второго порогового устройства соединен с управляющими входами первого и второго регистров памяти, переключателя, счетчика, блока коррекции рассогласования осей ТПВ системы и ИК-пеленгатора, сумматора с делителем.
Блок коррекции рассогласования осей ТПВ системы и ИК-пеленгатора представляет вычислительное устройство, которое производит по формуле (7) плавное изменение старого значения рассогласования на вновь измеренное. Первый и второй входы его раздельно подключены соответственно к выходам первого и второго регистра памяти, а третий и четвертый входы подключены к первому и второму выходу счетчика.
В счетчик с таймера поступает текущее время, измеряемое от момента схода ракеты, в момент разрешения начала корректировки рассогласования осей на его управляющий вход поступает сигнал "Корр". По этому сигналу счетчик останавливает счет и определяет время от момента схода до завершения измерений tюс и время проведения корректировки τюс. Временной вход счетчика соединен с выходом таймера, а управляющий вход подключен к выходу второго порогового устройства.
Логическая схема И-НЕ транслирует признак "Юст" разрешения захвата ракеты телеавтоматом ракеты и начала юстировки в телеавтомат ракеты и прерывает этот признак при наличии сигнала "Корр" начала плавной корректировки рассогласования осей ТПВ системы и ИК-пеленгатора. Выход схемы И-НЕ одновременно подключен к третьему входу телеавтомата сопровождения ракеты и третьему входу первой схемы И. Два входа схемы И-НЕ раздельно соединены соответствующим образом с выходом второй схемы И и выходом второго порогового устройства.
Все блоки вычислительной системы и элементов И, И-НЕ, счетчика, пороговых устройств, переключателя построены на базе вычислителя серии типа Motorola, а также схем цифровой логики, скоростных интегральных схем ТТЛШ серии 1533, 530 и БИС оперативной и постоянной памяти. Примеры выполнения и подключения этих устройств приведены в Зельдин Е.А. "Цифровые интегральные микросхемы в информационно-измерительной аппаратуре". Энергоатомиздат, 1986 г. [6] и "Аналоговые и интегральные микросхемы". Справочное пособие под редакцией Якубовского "Радио и связь", 1990 г. стр.46-53. [7].
Работа по предлагаемому устройству осуществляется следующим образом. Производится сопровождение и измерение координат цели телеавтоматом по тепловому сигналу от цели, поступающему в телеавтомат из тепловизионного прибора. Производится пуск ракеты и с момента ее схода начинается отсчет времени. Во все блоки с таймера поступает текущее время, этим осуществляется привязка измерений и расчетов к единому времени. После схода ракеты она захватывается на сопровождение ИК-пеленгатором по сигналу с ответчика. На основании координат цели и ракеты вычисляется отклонение ракеты от цели и одновременно из первого регистра памяти через переключатель в блок выработки отклонения ракеты от цели и команд управления поступает из первого регистра памяти через переключатель поправка на рассогласование осей ТПВ системы и ИК-пеленгатора, которая была ранее измерена и хранилась в памяти. По вычисленному отклонению ракеты от цели определяются команды управления, которые поступают в передатчик-шифратор и передаются на ракету, где дешифрируются и передаются на органы управления перегрузками ракеты, ракета сближается с целью. При попадании ракеты в тепловизионный растр первое пороговое устройство вырабатывает признак "ПрК". При наличии признака сопровождения ракеты ИК-пеленгатором "АСР-К" и признака "ПрК" вторая схема И вырабатывает признак "Юст" разрешения начала юстировки и захвата ракеты телеавтоматом ракеты, который через схему И-НЕ при отсутствии сигнала завершения юстировки "Корр" поступает на вход телеавтомата ракеты и первую схему И. Одновременно в телеавтомат поступает целеуказание по координатам ракеты, измеренным ИК-пеленгатором. По сигналу "Юст" строб телеавтомата ракеты устанавливается в координаты целеуказания, захватывает ракету на сопровождение, измеряет ее координаты по тепловому сигналу с ракеты, поступающему через пространство в ТПВ прибор, и вырабатывает логический признак подтверждения сопровождения ракеты "АСР-Т". Координаты ракеты, измеренные ИК-пеленгатором и телеавтоматом, поступают на вход блока выработки рассогласований ТПВ системы и ИК-пеленгатора, расчет рассогласований начинается с момента появления на входе первой схемы И одновременно трех признаков "АСР-К", "Юст" и "АСР-Т". В блоке выработки рассогласований ТПВ системы и ИК-пеленгатора вычисляется математическое ожидание (МО) рассогласование осей. Вычисления производятся с темпом 50 Гц и продолжаются до тех пор, пока ошибка измерения МО достигнет величины менее 0,01 мрад. При выполнении этого условия второе пороговое устройство вырабатывает признак "Корр" начала плавной корректировки рассогласования. По этому признаку выполняется следующее: второй регистр памяти запоминает вычисленное значение МО рассогласования осей; схема И-НЕ снимает сигнал "Юст" и прекращается сопровождение ракеты телеавтоматом; счетчик вычисляет время от момента схода ракеты, запоминает его tюс и выдает в блок коррекции рассогласования ТПВ системы и ИК-пеленгатора tюс и время проведения коррекции τюс; блок коррекции рассогласования ТПВ системы и ИК-пеленгатора начинает вычисления плавной корректировки рассогласования; выход блока коррекции рассогласований через переключатель подключается к блоку выработки рассогласований ракеты и цели и команд управления и в него поступает сигнал, пропорциональный рассогласованию осей, и команды управления вырабатываются с учетом измеренного рассогласования; обновляется информация первого регистра памяти и запоминается последнее установившееся значение. Таким образом, в процессе полета ракеты обеспечивается учет в командах управления возникающего в процессе эксплуатации оптико-электронной системы рассогласования осей ТПВ системы, сопровождающей цель, и ИК-пеленгатора, сопровождающего ракету.
Введение в состав ТПВ системы телеавтомата сопровождения ракеты позволило наряду с сопровождением ракеты ИК-пеленгатором обеспечить ее сопровождение и измерение координат ТПВ системой. А введение в цифровую вычислительную систему блоков выработки рассогласования осей ТПВ системы и ИК-пеленгатора и плавной корректировки этого рассогласования позволило исключить ошибки рассогласования между ТПВ системой и ИК-пеленгатором, возникающие при эксплуатации оптико-электронной системы, при наведении ракеты на цель. Логические устройства, переключатель и пороговые устройства обеспечили логическое взаимодействие блоков и их подключение в необходимые моменты. Совокупность принятых технических решений позволила исключить погрешности согласования осей ТПВ системы, сопровождающей и измеряющей координаты цели и ИК-пеленгатора, сопровождающего и измеряющего координаты ракеты. Это исключило систематические ошибки в промахе ракеты относительно цели с 1-2 мрад м до 0,01 мрад, что особенно важно при стрельбе на дальности более 10 км, обеспечило надежную вероятность поражения цели и повышение эффективности комплекса.
Испытания показали, что величину рассогласования осей с использованием данного предложения можно довести практически до нулевой величины.
По настоящему предложению разработана конструкторская документация при создании комплекса "Панцирь-C1", изготовлен опытный образец, который прошел испытания в полевых условиях. Предлагаемое изобретение может быть применено при модернизации комплекса "Тунгуска M1".
Источники информации
1. А.А.Лебедев и В.А.Карабанов. Динамика систем управления беспилотными летательными аппаратами. М.: Машиностроение, 1965 г., с.с.29-30, 328, 379-380.
2. Forecast International/DMS Market Intelligence Report, Missile Forecast, ADAMS, April 1998, pp.1-4.
3. Jane's Land - Based air defense. Tenth Edition 1997-98, p.p.293-297.
4. Патент РФ на изобретение №2131577 от 10 июня 1999 г.
5. Зельдин Е.А. Цифровые интегральные микросхемы в информационно-измерительной аппаратуре. Энергоатомиздат, 1986 г.
6. Аналоговые и интегральные микросхемы. Справочное пособие под редакцией Якубовского "Радио и связь", 1990 г., стр.46-53.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ наведения ракеты и оптико-электронная командная система наведения для его осуществления | 2020 |
|
RU2745661C1 |
| ЗЕНИТНЫЙ РАКЕТНО-ПУШЕЧНЫЙ КОМПЛЕКС | 2006 |
|
RU2321818C1 |
| ЗЕНИТНЫЙ РАКЕТНО-ПУШЕЧНЫЙ КОМПЛЕКС | 1998 |
|
RU2131577C1 |
| ОПТИКО-ЭЛЕКТРОННАЯ СИСТЕМА ЗЕНИТНОГО РАКЕТНОГО КОМПЛЕКСА | 1999 |
|
RU2165582C2 |
| Способ юстировки информационных средств зенитной боевой машины и устройство для юстировки информационных средств зенитной боевой машины | 2017 |
|
RU2670242C1 |
| Зенитный ракетный комплекс | 2017 |
|
RU2651533C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ НАЧАЛЬНЫХ УСЛОВИЙ НЕЛИНЕЙНОЙ ТРАЕКТОРИИ ВОЗДУШНОЙ ЦЕЛИ | 2011 |
|
RU2483272C2 |
| ОПТИКО-ЭЛЕКТРОННАЯ СИСТЕМА ЗЕНИТНОГО РАКЕТНОГО КОМПЛЕКСА | 2010 |
|
RU2433370C1 |
| СИСТЕМА НАВЕДЕНИЯ ЗЕНИТНЫХ УПРАВЛЯЕМЫХ РАКЕТ БЛИЖНЕГО ДЕЙСТВИЯ | 2006 |
|
RU2324139C1 |
| ЗЕНИТНЫЙ РАКЕТНЫЙ КОМПЛЕКС | 2010 |
|
RU2442942C1 |
Изобретение относится к области военной техники, в частности к оптико-электронным командным системам наведения ракет зенитных ракетных комплексов ближнего рубежа. Технический результат - повышение эффективности за счет повышения точности наведения ракеты путем измерения рассогласования осей тепловизионной системы и ИК-пеленгатора в процессе наведения ракеты и учета полученного рассогласования в командах наведения, передаваемых на ракету. Способ наведения ракеты заключается в сопровождении и измерении координат цели тепловизионной (ТПВ) системой относительно центра ТПВ растра, пуске ракеты и отсчете текущего времени от момента ее схода, захвате, сопровождении и измерении координат ракеты инфракрасным (ИК) пеленгатором, выработке отклонения ракеты от цели с учетом величины рассогласования осей между координатами ракеты, измеренными ТПВ системой и ИК-пеленгатором. 2 н. и 1 з.п. ф-лы, 1 ил.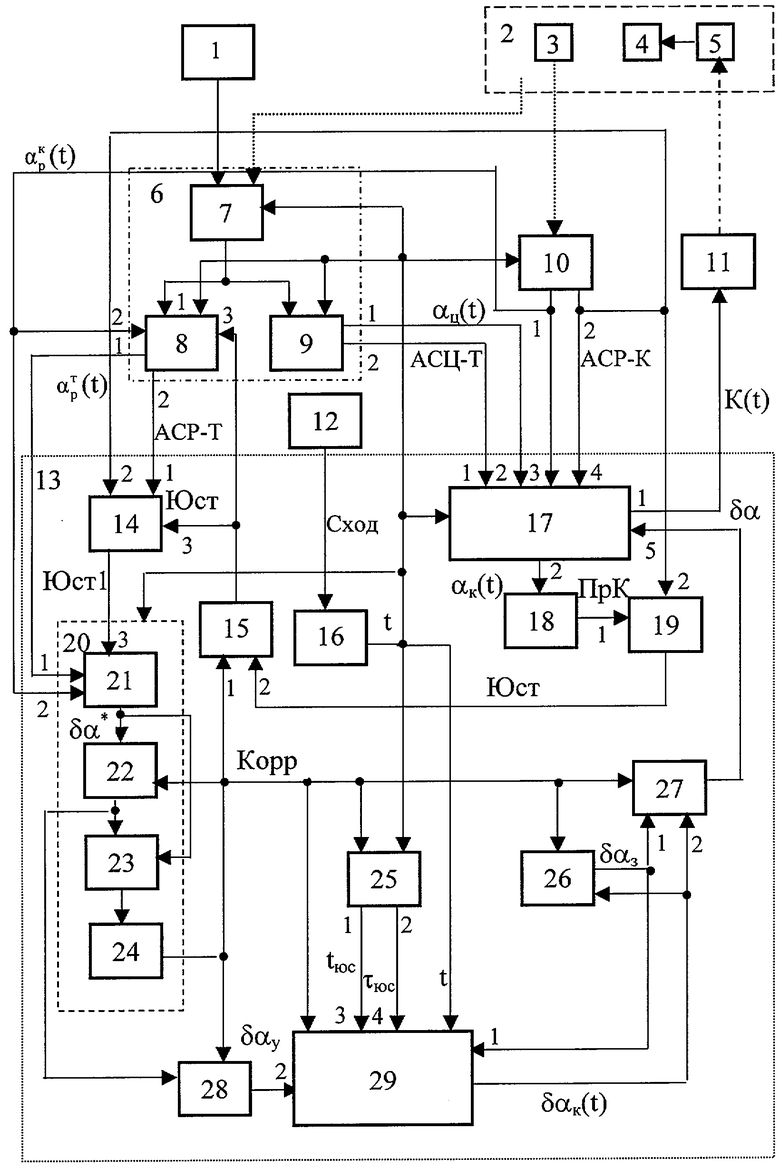

| ЗЕНИТНЫЙ РАКЕТНО-ПУШЕЧНЫЙ КОМПЛЕКС | 1998 |
|
RU2131577C1 |
| СИСТЕМА УПРАВЛЕНИЯ РАКЕТОЙ САМОХОДНОГО ЗЕНИТНОГО КОМПЛЕКСА | 1995 |
|
RU2102686C1 |
| US 5197691 А, 30.03.1993 | |||
| DE 3034838 С1, 29.11.1990. | |||

