Изобретение относится к области морской техники, а именно к способам пространственной ориентации подвижных подводных объектов. Оно может быть использовано для навигации подвижных подводных объектов с использованием их технических средств наблюдения.
Под подвижными подводными объектами далее понимаются подводные плавсредства, например, подводные лодки и подводные аппараты.
Известен способ пространственной ориентации подвижного объекта, являющийся аналогом изобретения, при котором осуществляют управление объектом на заданном маршруте с помощью бортовой инерциальной навигационной системы (ИНС), которая осуществляет расчет текущих координат подвижного объекта и скорости его движения [1]. В ИНС используются трехстепенные свободные гироскопы, обладающие чувствительностью к поворотам своего основания в пространстве [2], [3]. ИНС отслеживает перемещения подвижного объекта в пространстве относительно инерциальной системы координат, рассчитывает линейные и угловые отклонения и их производные, определяет текущие координаты и координатные углы. Она имеет гиростабилизированную платформу, либо физическую, моделируемую виртуально с помощью компьютера, на которой устанавливаются акселерометры и гироскопы. В современных ИНС применяются лазерно-кольцевые или волоконно-оптические гироскопы, например, во французской ИНС QUADRANS. Их достоинствами являются отсутствие движущихся частей, несложное техническое обслуживание, потребление меньшей мощности (до 10 Вт), малые масса (2,8 кг) и объем (2,3 л).
Преимуществами ИНС в целом являются непрерывное и полное представление текущих навигационных параметров, автономность и высокая помехозащищенность. Главный недостаток ИНС состоит в том, что при работе ИНС постепенно накапливаются случайные ошибки в навигационных параметрах [3]. Так, например, крылатая ракета США «Томагавк» BGM-109 имеет величину накапливаемой ошибки ИНС 750…900 м за один час полета [4].
С целью повышения точности пространственной ориентации подвижные объекты кроме ИНС дополнительно оснащают спутниковыми (СНС) и/или радионавигационными (РНС) системами, которые периодически в сеансах навигационной ориентации получают текущие значения навигационных параметров и позволяют корректировать работу ИНС. Однако для их использования подвижному подводному объекту необходимо поднять приемную антенну над поверхностью воды. Это демаскирует его работу, а при нахождении подводного объекта на большой глубине требует дополнительного времени и энергоресурса на всплытие и повторное погружение. Поэтому применение СНС и РНС на подвижных подводных объектах не всегда целесообразно.
Известен способ пространственной ориентации подвижного подводного объекта, принятый за прототип изобретения, при котором точность работы ИНС повышают за счет применения гидроакустических маяков (ГАМ), составляющих гидроакустическую навигационную систему (ГНС), которой заранее оборудуют район действий подвижного подводного объекта [1], [5], [6]. Однако для этого требуется заблаговременно оборудовать район действий гидроакустическими маяками, что ограничивает использование указанного способа.
Целью изобретения является разработка способа пространственной ориентации подвижного подводного объекта, обеспечивающего в не оборудованном навигационными средствами морском районе высокую точность позиционирования, необходимую для эффективного решения свойственных ему задач.
Цель изобретения достигается благодаря тому, что предлагается способ пространственной ориентации подвижного подводного объекта, при котором производят счисление пути с помощью бортовой инерциальной навигационной системы, уточняют текущие координаты с применением имеющихся в районе средств навигационного оборудования, отличающийся тем, что дополнительно используют информационную базу данных о разведанных подводных ориентирах, представляющих собой неподвижные контрастные подводные объекты с присущими им характеристиками, включающими ориентацию в пространстве, геометрические размеры и внешний облик, координаты и соответствующую им точность, данные о необходимых на маршруте подводных ориентирах записывают в запоминающее устройство подвижного подводного объекта на этапе подготовки его к пуску одновременно с вводом маршрута движения и программой работы, на маршруте ориентиры распознают с помощью технических средств наблюдения, при этом, если точность места используемого ориентира выше, то уточняют счисление, а если наоборот - то уточняют координаты ориентира, при обнаружении новых неподвижных контрастных подводных объектов их характеристики заносят в базу данных для передачи на пункт управления и дальнейшего использования в качестве подводных ориентиров.
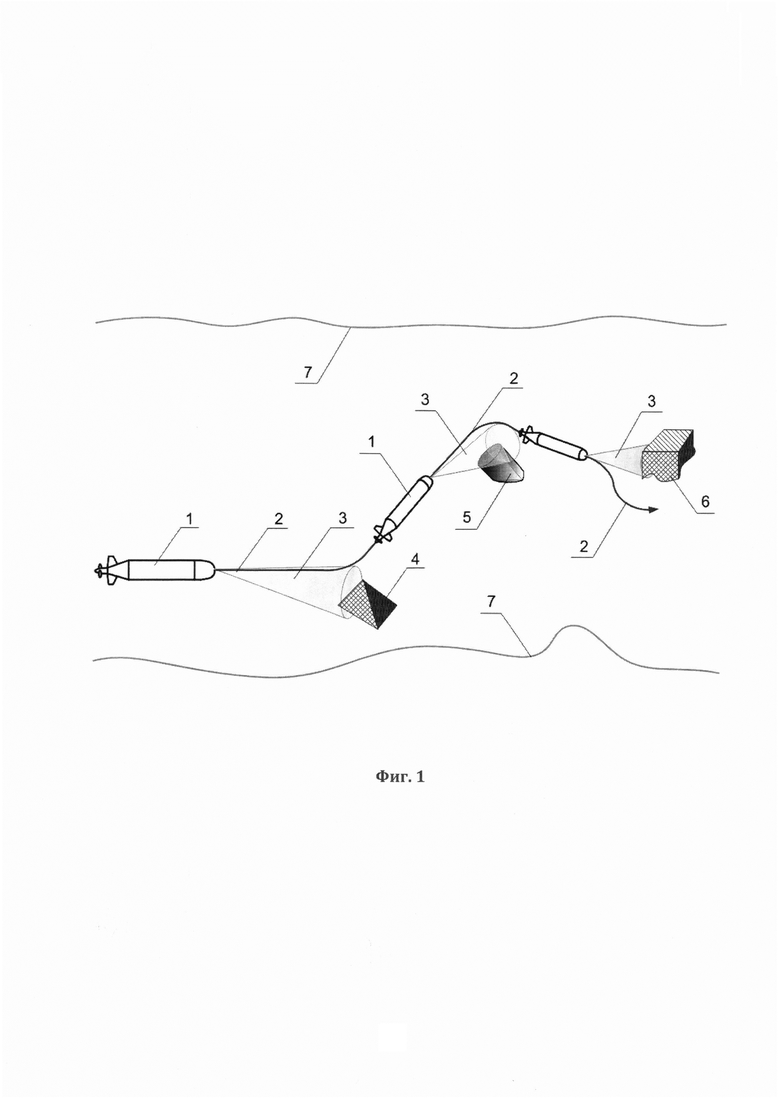
Способ пространственной ориентации подвижного подводного объекта проиллюстрирован на фиг. 1. Цифрами обозначены: 1 - подвижный подводный объект; 2 - траектория движения подвижного подводного объекта; 3 - область обзора пространства техническими средствами наблюдения подвижного подводного объекта (бортовым гидролокатором и/или видеокамерой); 4 - ориентир №1; 5 - ориентир №2; 6 - новый обнаруженный неподвижный контрастный подводный объект; 7 - морское дно.
Способ пространственной ориентации подвижного подводного объекта реализуется следующим образом. На носителе или пункте управления осуществляют подготовку подвижного подводного объекта к пуску, вводят в запоминающее устройство его бортовой системы управления программу работы, маршрут движения и данные по подводным ориентирам, после чего выпускают на маршрут. В процессе движения подвижного подводного объекта (1) в назначенный район по заданному маршруту обследуют с помощью гидролокатора и/или видеокамеры (3) пространство впереди по курсу. Обнаружив ориентир №1 (4), обследуют его средствами наблюдения и идентифицируют, если точность места ориентира превышает точность счисления, то уточняют координаты подвижного подводного объекта и его дальнейший курс. Если точность счисления выше, то уточняют координаты ориентира №1 и вводят соответствующую корректуру в запоминающее устройство. После ориентира №1 маршрут подвижного подводного объекта направляют к ориентиру №2, где повторяют действия. Таким образом, подвижный подводный объект ведут в район выполнения задачи. При обнаружении на маршруте неизвестного неподвижного контрастного подводного объекта (6) производят его обследование техническими средствами наблюдения (гидролокатором и/или видеокамерой), записывают в запоминающее устройство информацию об объекте, содержащую его номер, координаты с точностью счисления, геометрические размеры, облик и ориентацию в пространстве, необходимые для последующего использования в базе данных в качестве ориентира.
Техническим результатом изобретения является способ пространственной ориентации подвижного подводного объекта, обеспечивающий высокую точность его позиционирования при следовании в подводном положении на заданный участок работы в морском районе, не оборудованном навигационными средствами, а также создание базы данных неподвижных контрастных подводных объектов, пригодных для ориентирования под водой.
Источники информации
1. Илларионов Г.Ю., Сиденко К.С., Сидоренков В.В. Подводные роботы в минной войне: Монография. Калининград: ООО «Янтарный сказ», 2008. - 116 с. С. 74-75.
2. Гироскоп. Военно-морской словарь /Гл. ред. В.Н. Чернавин. М.: Воениздат, 1989. - 511 с. С. 107.
3. Инерциальная навигационная система // ВМС и кораблестроение. Дайджест зарубежной прессы. Выпуск 70-71, СПб, 2014. С. 108-109.
4. А.В. Новиков. Способы и системы управления современным ракетным оружием. СПб.: ВМИ, 2002. - 75 с. С. 67.
5. И.С. Калинский. Навигационное оборудование морских театров. Л.: ВВМКУ им. М.В. Фрунзе, 1980. - 428 с. С. 292.
6. Д. Литовкин, А. Рамм. В России создан подводный ГЛОНАСС. М.: Известия IZ, 08.12.2016, https//iz.ru/news/650211
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ навигационного оборудования морского района и самоходный подводный аппарат для его осуществления и арктическая подводная навигационная система для вождения и навигационного обеспечения надводных и подводных объектов навигации в стесненных условиях плавания | 2021 |
|
RU2773538C1 |
| СПОСОБ ОХРАНЫ ВОДНОГО РАЙОНА | 2016 |
|
RU2668494C2 |
| ИНТЕГРИРОВАННЫЙ КОМПЛЕКС НАВИГАЦИИ И УПРАВЛЕНИЯ ДВИЖЕНИЕМ ДЛЯ АВТОНОМНЫХ НЕОБИТАЕМЫХ ПОДВОДНЫХ АППАРАТОВ | 2011 |
|
RU2483327C2 |
| СПОСОБ НАВИГАЦИИ АВТОНОМНОГО НЕОБИТАЕМОГО ПОДВОДНОГО АППАРАТА | 2013 |
|
RU2563332C2 |
| СПОСОБ БЕСПЛАТФОРМЕННОЙ ИНЕРЦИАЛЬНОЙ НАВИГАЦИИ | 2022 |
|
RU2806707C1 |
| Подводный робототехнический комплекс | 2015 |
|
RU2609618C1 |
| СПОСОБ ПРОВЕРКИ ТОЧНОСТИ НАВИГАЦИИ АВТОНОМНОГО НЕОБИТАЕМОГО ПОДВОДНОГО АППАРАТА | 2022 |
|
RU2789714C1 |
| СПОСОБ ДИНАМИЧЕСКОГО ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ МОБИЛЬНЫХ ОБЪЕКТОВ | 2016 |
|
RU2624790C1 |
| НАВИГАЦИОННЫЙ КОМПЛЕКС | 2012 |
|
RU2483280C1 |
| Способ измерения ошибок начальной выставки инерциальной навигационной системы без привязки к внешним ориентирам | 2021 |
|
RU2779274C1 |
Изобретение относится к области морской техники, к способам пространственной ориентации подвижных объектов, и может быть использовано для навигации. Производят счисление пути с помощью бортовой инерциальной навигационной системы, уточняют текущие координаты. Используют информационную базу данных о разведанных подводных ориентирах. Данные о необходимых на маршруте подводных ориентирах записывают в запоминающее устройство подвижного объекта на этапе подготовки его к пуску одновременно с вводом маршрута движения и программой работы. Уточняют место подвижного объекта на маршруте, если точность места ориентира выше счисления. Если наоборот, то уточняют координаты ориентира. При обнаружении новых неподвижных объектов их характеристики заносят в базу данных для передачи на пункт управления и дальнейшего использования в качестве подводных ориентиров. Используют такие характеристики подводных ориентиров, как их ориентация в пространстве, геометрические размеры и внешний облик, по которым распознают их с помощью технических средств наблюдения. Обеспечивается высокая точность позиционирования. Создается база данных неподвижных ориентиров. 1 ил.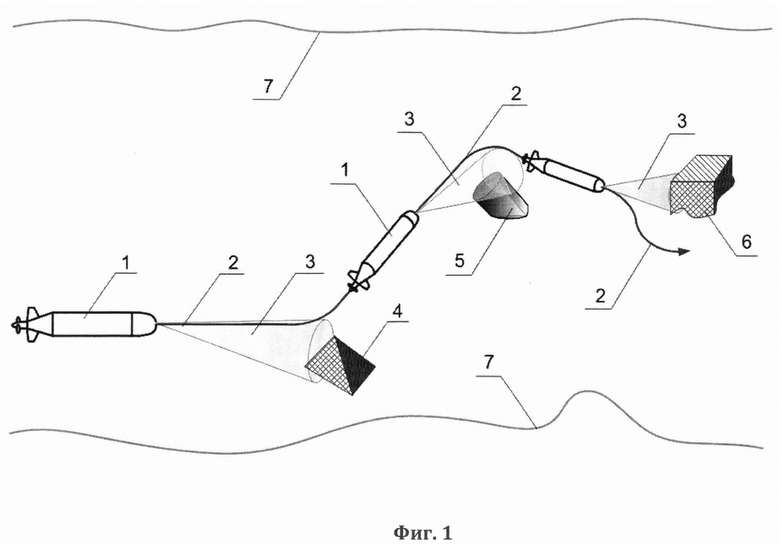
Способ пространственной ориентации подвижного подводного объекта, при котором производят счисление пути с помощью бортовой инерциальной навигационной системы, уточняют текущие координаты с применением имеющихся в районе средств навигационного оборудования, при этом используют информационную базу данных о разведанных подводных ориентирах, представляющих собой неподвижные контрастные подводные объекты с присущими им координатами и их точностью, данные о необходимых на маршруте подводных ориентирах записывают в запоминающее устройство подвижного подводного объекта на этапе подготовки его к пуску одновременно с вводом маршрута движения и программой работы, уточняют место подвижного подводного объекта на маршруте, если точность места ориентира выше счисления, а если наоборот, то уточняют координаты ориентира, при обнаружении новых неподвижных контрастных подводных объектов их характеристики заносят в базу данных для передачи на пункт управления и дальнейшего использования в качестве подводных ориентиров, отличающийся тем, что дополнительно используют такие характеристики подводных ориентиров, как их ориентация в пространстве, геометрические размеры и внешний облик, по которым распознают их на маршруте с помощью технических средств наблюдения.
| Способ повышения точности навигации автономного необитаемого подводного аппарата с инерциальной навигационной системой и системой технического зрения | 2018 |
|
RU2680395C1 |
| ПОДВИЖНЫЙ МОРСКОЙ АППАРАТ ДЛЯ ПОДВОДНЫХ ИССЛЕДОВАНИЙ | 2011 |
|
RU2478059C1 |
| Привод к независимым рейкам секций топливного насоса | 1959 |
|
SU130292A1 |
| Способ определения географических координат подводного объекта | 2018 |
|
RU2713814C1 |
| СПОСОБ СНИЖЕНИЯ ПОГРЕШНОСТИ ОЦЕНОК СОБСТВЕННЫХ КООРДИНАТ АВТОНОМНОГО НЕОБИТАЕМОГО ПОДВОДНОГО АППАРАТА С ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМОЙ | 2012 |
|
RU2520960C2 |
| Устройство для автоматической регулировки подача рассола к хлорным ваннам | 1938 |
|
SU56325A1 |

