Изобретение относится к области гидроакустики, а именно к способу регистрации уровня шумоизлучения морского объекта в широкой полосе частот в условиях повышенного уровня шумов морской акватории и их нестационарности в пределах времени регистрации прохода морского объекта. Изобретение может быть использовано для регистрации и измерения параметров первичного гидроакустического поля (в частности гидроакустического давления) движущегося морского объекта, а также может быть использовано для обнаружения морских объектов подводным объектом, находящимся в неблагоприятных, для обнаружения, гидрологических условиях, например при наличии горизонтального слоя скачка (ГСС). Сигнал, от цели проходящий через ГСС ослабляется на 40 дБ, что может привести к невозможности обнаружения морских объектов, объектом, находящимся ниже слоя скачка.
Процедура измерения шумоизлучения движущегося морского объекта (МО) заключается в фиксации уровней значения проходной характеристики, получаемых путём измерений текущих значений звукового давления шума движущегося морского объекта. Измерения производятся в условиях фоновых шумов (помех), что в реальных условиях затрудняет, а в некоторых условиях делает невозможным регистрацию проходной характеристики движущегося морского объекта, поскольку при высоком уровне помех характеристика прохода оказывается искаженной случайными флуктуациями нестационарной гидроакустической помехи.
Существует несколько методов выделения сигнала из смеси сигнал+помеха при регистрации проходной характеристики морского объекта.
Известен метод энергетического вычитания помехи (ЭВП) при измерении шумоизлучения морского объекта. Сущность метода заключается в оценке уровня помехи по краям проходной характеристики (т.е. там, где уровень полезного сигнала во много раз меньше уровня помехи) и последующего вычитания этого уровня из максимального значения проходной характеристики. [Новиков А.К. Статистические измерения и обнаружение сигналов.- СПб.: ЦНИИ им. акад. А.Н. Крылова, 2006 г., стр. 151-154].
Основным недостатком метода ЭВП является то, что этот метод имеет малую помехоустойчивость в условиях нестационарной помехи в пределах времени регистрации прохода морского объекта. Кроме этого, при направленном в нос или корму характере шумоизлучения источника оценка помехи производится с большой погрешностью, обусловленной недостаточным спадом сигнальной составляющей.
Эти недостатки устранены другим известным методом для увеличения динамического диапазона измерений и увеличения отношения сигнал/помеха, наиболее близким к заявленному изобретению техническим решением для регистрации морского объекта и выбранным в качестве прототипа.
Существенно большими возможностями с точки зрения помехоустойчивости и точности измерения уровня шума при наличии помех обладает метод энергетической согласованной обработки (ЭСО), реализованный в комплексе технических средств КТС «Тополь-СФП» и разработанный во ВНИИФТРИ В.И. Теверовским, А.О. Кюльян и др. [Новиков А.К. Статистические измерения и обнаружение сигналов.- СПб.: ЦНИИ им. акад. А.Н. Крылова, 2006 г., С. 151-154].
Сущность метода заключается в том, что по мере прохода источника относительно приёмника в полосе анализа регистрируется энергетическая сумма полезного сигнала и помехи, которая затем подвергается обработке при помощи фильтра, согласованного с формой энергетической нестационарности полезного сигнала. При этом происходит фильтрация высокочастотных флюктуаций помехи при сохранении формы низкочастотной (относительно медленной по сравнению с быстрыми флюктуациями помехи) нестационарности полезной компоненты.
При реализации данного метода выполняется обработка следующим образом:
1. Производится запись характеристики прохода по интенсивности с небольшим предварительным сглаживанием.
2. Выполняется расчетная характеристика прохода для тех же параметров, что и для измеренной характеристики прохода.
3. Вычисляются взаимные корреляционные функции между измеренной характеристикой и расчетными функциями, с возможностью изменять ширину расчетной характеристики прохода и приближать ее к реальной характеристике прохода.
4. Вычисляется уровень максимума характеристики прохода.
Метод ЭСО основан на применении алгоритма вычисления корреляционной функции, где сравниваются две функции различного происхождения - измеренная характеристика прохода и расчетная функция.
Недостатком описанного метода, реализованного в комплексе технических средств КТС «Тополь-СФП» и взятого за прототип является то, что метод ЭСО имеет малую помехоустойчивость в условиях нестационарной помехи в пределах времени регистрации прохода морского объекта. Динамический диапазон анализа методом ЭСО зависит от свойств случайной нестационарности помехи, амплитуды и ширины флюктуационных «всплесков» помехи.
Поэтому использование метода ЭСО, рассмотренного выше и основанного на предположении стационарности помехи в интервале проходной характеристики неэффективно.
На устранение этого недостатка направлено заявленное изобретение, технической задачей которого является повышение помехоустойчивости гидроакустических систем и точности измерения уровня шумоизлучения путем создания способа регистрации шумоизлучения морского объекта.
Реализация поставленной технической задачи позволяет добиться следующего технического результата:
- создан новый способ регистрации шумоизлучения морского объекта в широкой полосе частот в условиях повышенного уровня и нестационарности фоновых шумов (помех) в пределах времени регистрации прохода морского объекта.
Сущность способа заключается в применении метода адаптивной фильтрации, основанного на алгоритме Фильтра Калмана. Данный алгоритм позволяет производить фильтрацию случайного процесса с известными динамическими свойствами в реальном масштабе времени без использования образцового сигнала, который часто используется в наиболее распространённых адаптивных фильтрах, таких как LMS, RLS фильтры. Также алгоритм фильтра Калмана имеет наибольшую скорость сходимости и дает наименьшие остаточные шумы по сравнению с алгоритмами LMS и RLS. Данный факт позволит с наименьшими временными затратами выделить полезный сигнал шумоизлучения морского объекта в неблагоприятных гидрологических условиях, когда затруднено обнаружение, даже сильношумящих морских объектов.
Для достижения указанного выше технического результата предложен «способ регистрации шумоизлучения морского объекта» с учетом постоянно изменяющейся помеховой обстановки в районе измерения, заключающийся в том, что сначала регистрируют в приемном устройстве амплитудно-частотную характеристику (АЧХ) шумового поля водного пространства, затем ее используют для последующей обработки в блоке первичной обработки сигналов. Далее во время регистрации морского объекта в водном пространстве в области расположения приемного устройства формируют АЧХ смеси сигнала шумоизлучения морского объекта и помехи шумового поля водного пространства (АЧХ смеси), затем АЧХ смеси подают на вход блока первичной обработки сигналов и используют для последующей обработки.
Принципиальным отличием от прототипа является то, что АЧХ смеси подают на вход дополнительно введенного линейного фильтра Калмана. Затем выделенную АЧХ сигнала шумоизлучения морского объекта через амплитудный детектор подают на регистрирующие устройство, где регистрируют АЧХ морского объекта.
Заявленный способ реализуется в устройстве содержащем приемное устройство, включающее последовательно соединенные подводное устройство и блок согласования с возможностью передачи принятого сигнала на вход блока первичной обработки сигналов, состоящего из приемного канала, включающего блок фильтров и последовательно соединенный с ним аналого-цифровой преобразователь. Выход аналого-цифрового преобразователя блока первичной обработки сигналов соединен с входом линейного фильтра Калмана. Выход линейного фильтра Калмана соединен с входом амплитудного детектора. Выход амплитудного детектора соединен через регистрирующие устройство с входом блока отображения информации.
Такое конструктивное решение изобретения за счет отличительного признака дало новые технические эффекты.
Использование блока ЛФК расширило возможности изобретения, в результате которого заявленный способ производит регистрацию шумоизлучения морского объекта.
Блок ЛФК необходим для выделения полезного сигнала на фоне помех или в гидрологических условиях, ослабляющих уровень полезного сигнал.
Предложенный способ экспериментально обоснован.
Результаты экспериментальных исследований
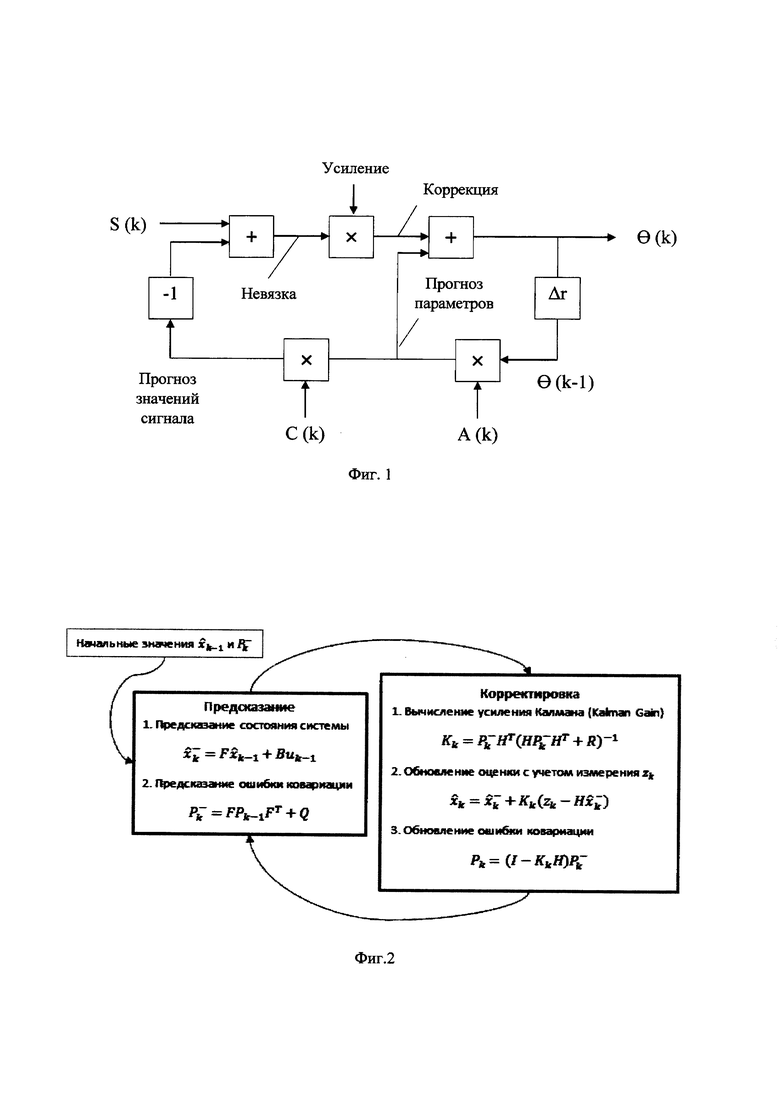
На фиг.1 показана структурная схема фильтра Калмана. Алгоритм работы структурной схемы состоит из двух повторяющихся фаз: предсказание и корректировка. На фиг.2 показан алгоритм работы. [Прохоров М.Б. Метод оптимальной фильтрации Калмана-Бьюси и его обобщения / М.Б. Прохоров, В.К. Саульев. - М.: ВИНИТИ, 1977. - С. 167-207. -- (Итоги науки и техники. Сер. Математический анализ, т. 14)]
На первом этапе рассчитывается предсказание состояния в следующий момент времени (с учетом неточности их измерения). На втором, новая информация с датчика корректирует предсказанное значение (также с учетом неточности и зашумленности этой информации). Следует отметить, что в ряде случаев при использовании фильтра Калмана полезным сигналом является не выходной сигнал фильтра, а сигнал ошибки, т. е. разность между образцовым сигналом и выходным сигналом адаптивного фильтра. В виде образцового сигнала может выступить как сигнал, так и помеха, в зависимости от того, какая задача нас интересует. В нашем случае мы можем за начальное состояние системы взять значение помехи и за счет алгоритма показанного на фиг.2, выделять полезный сигнал.
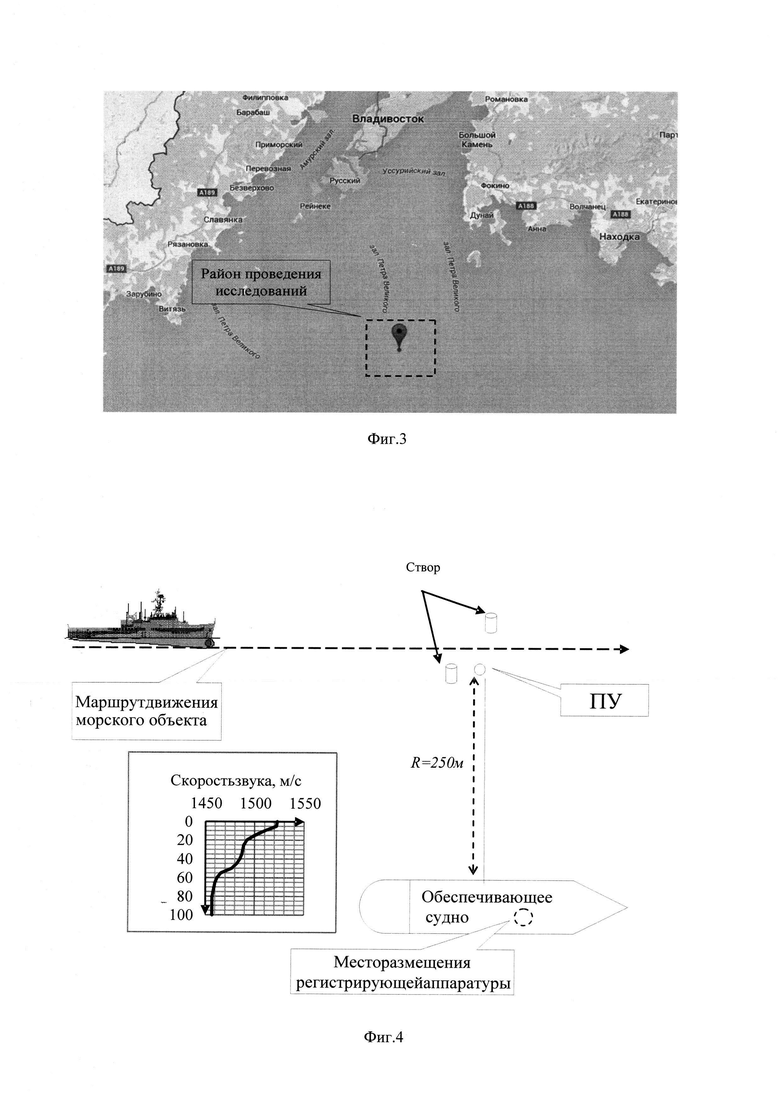
Район проведения экспериментальных исследований географически расположен в северо-западной части японского моря и представлен на фиг.3.
На фиг.4. представлена схема взаимного расположения судна контроля физических полей, размещение выносного устройства, измерительной аппаратуры, маршрут движения морского объекта и профиль вертикального распределения скорости звука (ВРСЗ) при проведении экспериментальных исследований. Морской объект двигался по указанному маршруту со скоростью хода 8 узла.
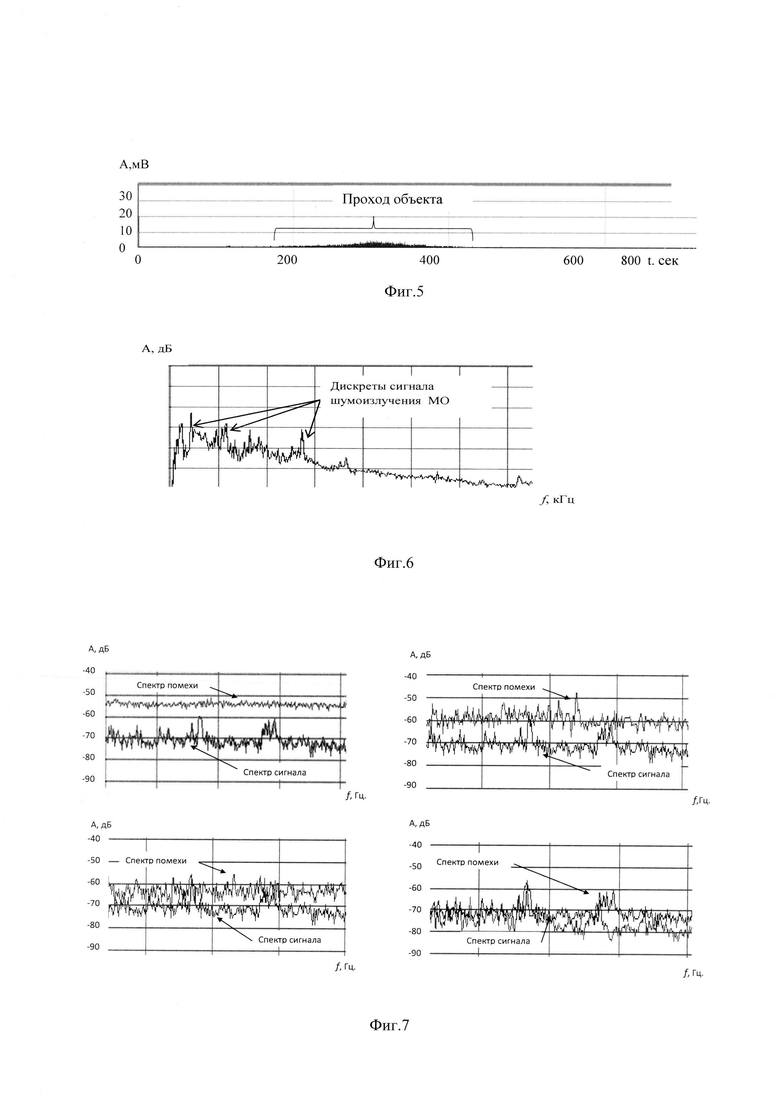
В начале экспериментальных исследований производилась регистрация прохода морского объекта на скорости хода 8 узлов. На фиг.5. представлена проходная характеристика объекта, записанного с ПУ.
Из анализа фиг.5 видно, что с 190-420 секунд проявляется проходная характеристика морского объекта. Общая длительность записи составила 800 сек.
На фиг.6 представлен спектр сигнала шумоизлучения морского объекта на скорости хода 8 узлов.
Далее с целью, приближенного создания реальных условий, в которых происходит распространение акустического сигнала в морской среде, как неблагоприятные гидрологические условия (наличие ГСС), различные степени волнения, шумы различного происхождения и т.д., полученная реализация записи последовательно зашумлялась путем аддитивного добавления к ней ранее записанного шума моря без наличия мешающих целей.
Таким образом, формировалась аддитивная смесь «сигнал+помеха» с различным входным отношением сигнал помеха(ОСП) от 0 до -10 дБ.
На фиг.7 представлены спектры несущей сигнала и помехи при разных параметрах входных ОСП.
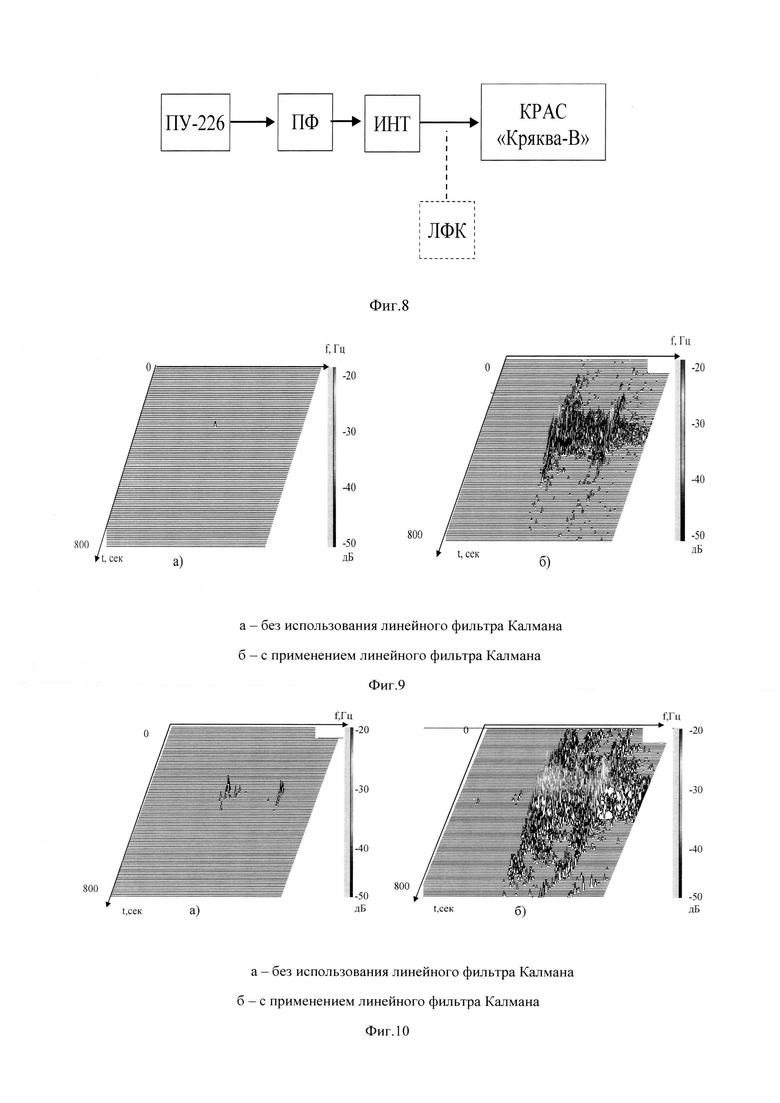
Далее полученные реализации сигналов обрабатывались с использованием классической схемы типового тракта обнаружения и по схеме предлагаемого способа, как показано на фиг.8, где ПУ-226 - приемное устройство, ПФ - полосовой фильтр, ИНТ - интегратор, ЛФК - линейный фильтр Калмана, КРАС «Кряква-В» - спектроанализатор.
Оценка результатов, полученных при проведении экспериментальных исследований, осуществлялась путем измерения отношения «сигнал+помеха» или превышение уровня сигнала шумоизлучения морского объекта над уровнем сплошной части спектра (СЧС) при применении фильтрации сигнала шумоизлучения, основанной на алгоритме фильтра Калмана и без нее.
На фиг.9 представлены характерные результаты сравнительного анализа обработки сигналов шумоизлучения морского объекта, двигающегося со скоростью 8 узлов при классической схеме обработки и с использованием разработанного алгоритма на основе линейного фильтра Калмана для входного ОСП -10 дБ.
Анализ фиг.9 показывает, что выходное ОСП при выделении сигналов шумоизлучения морского объекта по классической схеме составило примерно 2 дБ (см. фиг.9а) и 8 дБ с применением ЛФК (см. фиг.9б). Время наблюдения шумоизлучения цели без обработки составляет примерно 2 с. Время наблюдения шумоизлучения при использовании адаптивной обработки составило примерно 350 с.
На фиг.10 представлены результаты обработки проходной характеристики цели на скорости 8 узлов, по классической схеме и с применением ЛФК при входном ОСП 0 дБ.
Из анализа фиг.10 видно, что выходное ОСП при выделении сигналов шумоизлучения морского объекта по классической схеме составило примерно около 8 дБ (см. фиг.10.а) и 19 дБ при обработке с применением ЛФК (см. фиг.10 а). Время наблюдения проходной характеристики цели без обработки составляет примерно 8 секунд. Время наблюдения шумоизлучения при использовании ЛФК составило примерно 560 секунд.
Оценка результатов, полученных при проведении экспериментальных исследований осуществлялось путем измерения отношения «сигнал+помеха» или превышения уровня сигнала шумоизлучения МО над уровнем сплошной части спектра (СЧС) при применении фильтрации сигнала шумоизлучения, основанной на алгоритме фильтра Калмана и без нее.
Использование предложенного способа позволяет повысить соотношение сигнал/помеха (фиг.9, 10).
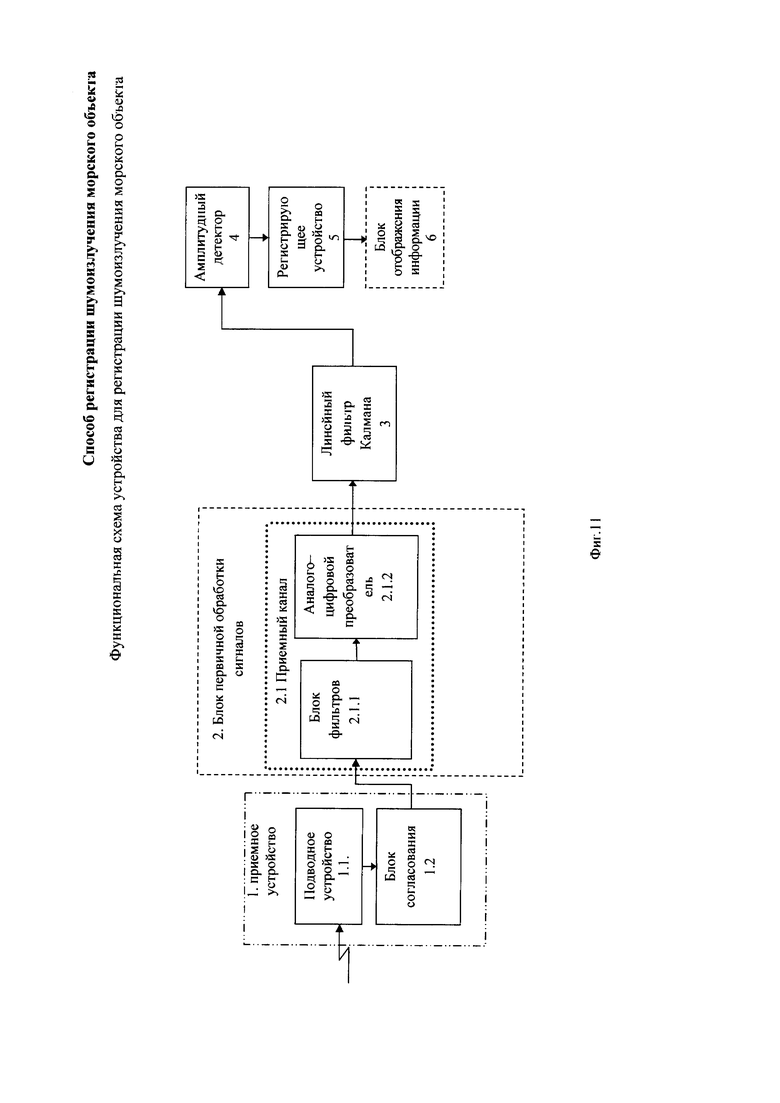
На фиг.11 представлена функциональная схема устройства для регистрации шумоизлучения морского объекта.
На схеме представлено:
1. Приемное устройство
1.1 Подводное устройство
1.2. Блок согласования
2. Блок первичной обработки сигналов
2.1. Приемный канал
2.1.1. Блок фильтров
2.1.2. Аналого-цифровой преобразователь
3. Линейный фильтр Калмана(ЛФК)
4. Амплитудный детектор
5. Регистрирующее устройство
6. Блок отображения информации
Все конструктивные элементы в приемном устройстве 1, в блоке первичной обработки сигналов 2, в ЛФК 3, а также в амплитудном детекторе 4, регистрирующем устройстве 5 и блоке отображения информации 6 соединены электрическими связями.
В качестве устройства для приема сигнала, в блоке приемного устройства 1 сформировано подводное устройство 1.1, принимающий электроакустический элемент с возможностью приема акустических сигналов в водной среде, выход которого последовательно соединен с входом блока согласования, служащего для согласования принятых подводным устройством акустических сигналов в электрические для передачи на вход блока фильтров 2.1.1, входящего в состав приемного канала 2.1, блока первичной обработки сигналов 2.
В блоке первичной обработки сигналов 2 выход блока фильтров 2.1.1, последовательно соединен с входом аналого-цифрового преобразователя 2.1.2 для возможности пропускания передающегося электрического сигнала оптимальной полосы частот. Выход аналого-цифрового преобразователя 2.1.2 последовательно соединен с входом блока ЛФК 3 для выделения полезного сигнала из смеси сигнал+помеха. Выход ЛФК 3 соединен с входом амплитудного детектора 4. Выход амплитудного детектора 4 соединен с входом регистрирующего устройства 5. Регистрирующее устройство 5 использовано с возможностью визуального отображения обработанного сигнала. Кроме того, выход регистрирующего устройства 5 соединен с входом блока отображения информации 6 для документирования данных.
Осуществление способа
Для осуществления заявленного способа устройство регистрации уровня шумоизлучения морского объекта снабжено общепринятым переносным или стационарным источником питания, расположенным на мобильном посту.
При работе подводное устройство 1.1, в качестве которого использован электроакустический элемент, широко используемый в гидроакустике, расположенный в определенной точке подводного пространства акватории, принимает со всех направлений подводного пространства амплитудно-чачтотная характеристика шумового поля водного пространства(АЧХ). Принимаемая АЧХ шумового поля водного пространства через блок согласования 1.2, поступает на последовательно соединенный приемный канал 2.1, блока первичной обработки сигналов 2, включающий последовательно соединенные блок фильтров 2.1.1 и аналого-цифровой преобразователь 2.1.2, для пропускания электрических сигналов оптимальной полосы частот и преобразования их в цифровой вид для последовательной передачи на вход блока линейного фильтра Калмана 3, в котором производится выделение полезного сигнала из смеси сигнал+помеха.
При прохождении морского объекта в области расположения приемного устройства сформированная АЧХ смеси шумоизлучения морского объекта и помехи шумового поля водного пространства с выхода аналого-цифрового преобразователя 2.1.2 приемного канала 2.1. блока первичной обработки сигналов 2 поступает на вход блока линейного фильтра Калмана 3.
После обработки в блоке ЛФК 3 выделенная АЧХ морского объекта из смеси полезного сигнала и помехи, подается на вход амплитудного детектора 4 для выделения амплитудной огибающей.
Далее продетектированный сигнал поступает на вход регистрирующего устройства 5 для регистрации и документирования полученных в результате измерений данных. Визуальное наблюдение принятого акустического сигнала происходит в блоке отображения информации 6.
После на экране регистрирующего устройства 5 наблюдается АЧХ морского объекта.
Заявленный способ представляет значительный интерес для народного хозяйства, так как реализуемое данным способом устройство обеспечивает охрану биологических и мобильных техногенных морских объектов. Заявленное решение не оказывает отрицательного воздействия на экологическое состояние окружающей среды.
Таким образом, заявленный способ «Способ регистрации шумоизлучения морского объекта» является новым способом для оценки уровня шумоизлучения морских объектов.
Заявленный способ обладает следующими достоинствами:
- возможность получения более точных (корректных) данных уровня шумоизлучения морских объектов. Данное достоинство способствует качественному решению задач по измерению и нормированию шумности морских объектов, а также более вероятному обнаружению морских объектов.
Заявленный способ промышленно применим, так как для его осуществления используются широко распространенные компоненты и изделия радиотехнической промышленности и вычислительной техники.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ регистрации шумоизлучения морского подводного объекта | 2020 |
|
RU2746312C1 |
| Способ регистрации малошумного морского объекта с использованием медианной фильтрации | 2016 |
|
RU2616357C1 |
| СПОСОБ РЕГИСТРАЦИИ МАЛОШУМНОГО МОРСКОГО ОБЪЕКТА | 2014 |
|
RU2572052C2 |
| Способ регистрации проходной характеристики морского объекта | 2021 |
|
RU2774731C1 |
| Способ регистрации уровня шумоизлучения морского объекта | 2017 |
|
RU2659186C1 |
| Способ регистрации проходной характеристики морского объекта в мелководной акватории | 2022 |
|
RU2786039C1 |
| Обнаружитель движущихся подводных объектов на фоне биологического шума мелководной акватории, где обитают раки-щелкуны | 2021 |
|
RU2779380C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ШУМЯЩИХ В МОРЕ ОБЪЕКТОВ | 2005 |
|
RU2298203C2 |
| СПОСОБ ПОЛУЧЕНИЯ ИНФОРМАЦИИ О ШУМЯЩИХ В МОРЕ ОБЪЕКТАХ | 2001 |
|
RU2208811C2 |
| УСТРОЙСТВО ДЛЯ ОБНАРУЖЕНИЯ И ПЕЛЕНГОВАНИЯ НИЗКИХ ЗВУКОВЫХ ГИДРОАКУСТИЧЕСКИХ ИЗЛУЧЕНИЙ МОРСКИХ БИОЛОГИЧЕСКИХ ОБЪЕКТОВ | 1999 |
|
RU2152627C1 |
Изобретение относится к области гидроакустики, а именно к способу регистрации шумоизлучения морского объекта. Техническим результатом изобретения является способ регистрации шумоизлучения морского объекта в широкой полосе частот, который может быть использован для регистрации и измерения параметров первичного гидроакустического поля (в частности, гидроакустического давления) движущегося морского объекта. Согласно изобретению способ регистрации шумоизлучения морского объекта заключается в том, что сначала регистрируют в приемном устройстве амплитудно-частотную характеристику (АЧХ) шумового поля водного пространства, затем ее используют для последующей обработки в блоке первичной обработки сигналов. Далее во время регистрации морского объекта в водном пространстве в области расположения приемного устройства формируют АЧХ смеси сигнала шумоизлучения морского объекта и помехи шумового поля водного пространства (АЧХ смеси), затем АЧХ смеси подают на вход блока первичной обработки сигналов и используют для последующей обработки. Принципиальным отличием от прототипа является то, что далее АЧХ смеси сигнала шумоизлучения морского объекта и помехи шумового поля водного пространства подают на вход дополнительно введенного линейного фильтра Калмана. Затем выделенную АЧХ сигнала шумоизлучения морского объекта через амплитудный детектор подают на регистрирующее устройство, где регистрируют АЧХ морского объекта. Заявленный способ обладает следующим достоинством: возможность получения более точных (корректных) данных уровня шумоизлучения морских объектов. Данное достоинство способствует качественному решению задач по измерению и нормированию шумности морских объектов, а также более вероятному обнаружению морских объектов. 11 ил.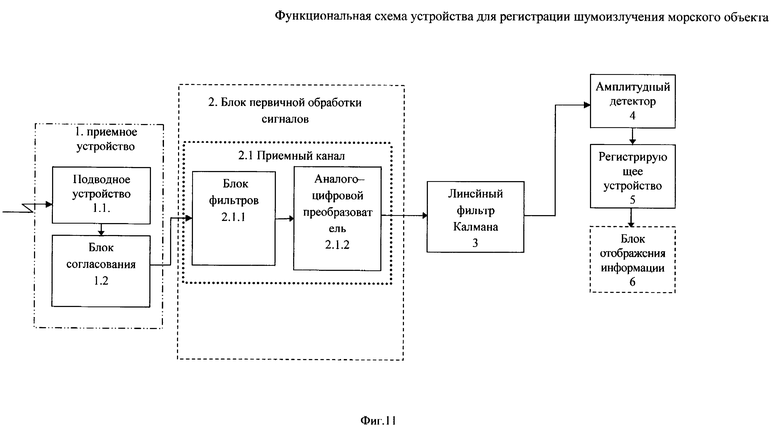
Способ регистрации шумоизлучения морского объекта, заключающийся в том, что сначала регистрируют в приемном устройстве амплитудно-частотную характеристику (АЧХ) шумового поля водного пространства, затем ее используют для последующей обработки в блоке первичной обработки сигналов, далее во время регистрации морского объекта в водном пространстве в области расположения приемного устройства формируют АЧХ смеси сигнала шумоизлучения морского объекта и помехи шумового поля водного пространства (АЧХ смеси), затем АЧХ смеси подают на вход блока первичной обработки сигналов и используют для последующей обработки, отличающийся тем, что АЧХ смеси сигнала подают на вход дополнительно введенного линейного фильтра Калмана, затем выделенную АЧХ сигнала шумоизлучения морского объекта через амплитудный детектор подают на регистрирующие устройство, где регистрируют АЧХ морского объекта.
| Способ регистрации уровня шумоизлучения морского объекта | 2017 |
|
RU2659186C1 |
| СПОСОБ РЕГИСТРАЦИИ МАЛОШУМНОГО МОРСКОГО ОБЪЕКТА | 2014 |
|
RU2572052C2 |
| СПОСОБ ОБНАРУЖЕНИЯ ШУМЯЩИХ В МОРЕ ОБЪЕКТОВ | 2005 |
|
RU2300118C1 |
| СПОСОБ РАСПОЗНАВАНИЯ ЛОЖНЫХ ЦЕЛЕЙ, ВЫЗВАННЫХ СОБСТВЕННЫМИ ПОМЕХАМИ ПОДВИЖНОГО НОСИТЕЛЯ | 2012 |
|
RU2514154C1 |
| СПОСОБ ОБНАРУЖЕНИЯ, ОПРЕДЕЛЕНИЯ КООРДИНАТ И СОПРОВОЖДЕНИЯ ВОЗДУШНЫХ ОБЪЕКТОВ | 2014 |
|
RU2564385C1 |
| US 6335905 B1, 01.01.2002. | |||

