ПРЕДПОСЫЛКИ ИЗОБРЕТЕНИЯ
Область изобретения
Настоящее изобретение относится к роботам для ортопедических вмешательств, более конкретно к роботу для содействия при вставлении винтов, который объединяет в себе средство для отслеживания и компенсации движения кости.
Описание уровня техники
Использование систем транспедикулярной фиксации винтами для стабилизации позвоночника становится все более распространенным явлением в спинальной хирургии. Эта технология в настоящее время используется при выполнении операций сращения в позвоночнике благодаря предполагаемым улучшенным показателям сращения и жесткости, обеспечиваемым этими конструкциями. Было описано множество систем транспедикулярной фиксации винтами и разрабатывают новые методы. Традиционные методы сильно зависят от ловкости хирурга; методы, в которых используется навигация, требуют внешнего устройства. Роботизированная хирургия использует роботизированную систему в сочетании с устройством слежения, которое обеспечивает хирургу надежное наводящее устройство.
В US 6322567 описана система для отслеживания и компенсации движений кости. Система основана на определении пространственной взаимосвязи между хирургическим роботом–манипулятором и костью и отслеживании поступательных и вращательных движений кости с помощью датчика движения кости. Точность этого подхода ограничена по существу абсолютной точностью хирургического робота–манипулятора, который отвечает за компенсацию движения кости. Кроме того, система опирается на процедуру калибровки, которая определяет трансформационную связь между системой координат хирургического робота–манипулятора и системой координат детали слежения. Точность робота–манипулятора и точность процедуры калибровки являются двумя внутренними ограничениями этой конструкции, которые вносят значительные ошибки в систему, что может оказывать воздействие на общую эффективность работы устройства. Кроме того, процедура регистрации зависит также от измерения набора точек в кости оператором–человеком, который управляет системой слежения. Этот последний этап вносит ошибки, которые могут быть непредсказуемыми.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
В настоящем изобретении представлен хирургический робот, который отслеживает и компенсирует движение кости, который содержит механическое устройство слежения и устройство наведения инструмента на рабочем органе робота–манипулятора. Основание устройства слежения и устройство наведения инструмента имеют общую систему координат, то есть находятся в одной плоскости, так что система может напрямую определять точное положение устройства наведения инструмента относительно отслеживаемой кости без какого–либо промежуточного устройства. Таким образом, можно обойтись без оптического устройства слежения и связанных с ним камер, что освобождает рабочую зону от камер и других устройств, затрудняющих процедуры.
Устройство слежения определяет пространственное отношение между роботом–манипулятором и костью путем отслеживания положения кости в трех перпендикулярных осях (x, y, z) и ориентации (б, в, г) относительно трех перпендикулярных осей, что составляет шесть параметров. Следовательно, устройство слежения представляет собой механическую систему, которая должна предоставлять по меньшей мере шесть степеней свободы, чтобы отслеживать эти шесть параметров. Это достигается с помощью блока шарнирно–сочлененных сегментов и кодовых датчиков, связанных с сегментами. В первом варианте осуществления устройство слежения представляет собой блок из четырех шарнирно–сочлененных сегментов с шестью степенями свободы вращения. В другом варианте осуществления устройство слежения снабжено шестью или семью степенями свободы, где одна из степеней свободы представляет собой сегмент переменной длины, а другие представляют собой степени свободы вращения.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Для завершения описания и обеспечения лучшего понимания изобретения представлен набор чертежей. Указанные чертежи иллюстрируют предпочтительный вариант осуществления изобретения, который не следует понимать как ограничивающий объем изобретения, а просто как пример того, как можно осуществить изобретение.
На Фиг.1 представлен хирургический робот с устройством слежения согласно изобретению.
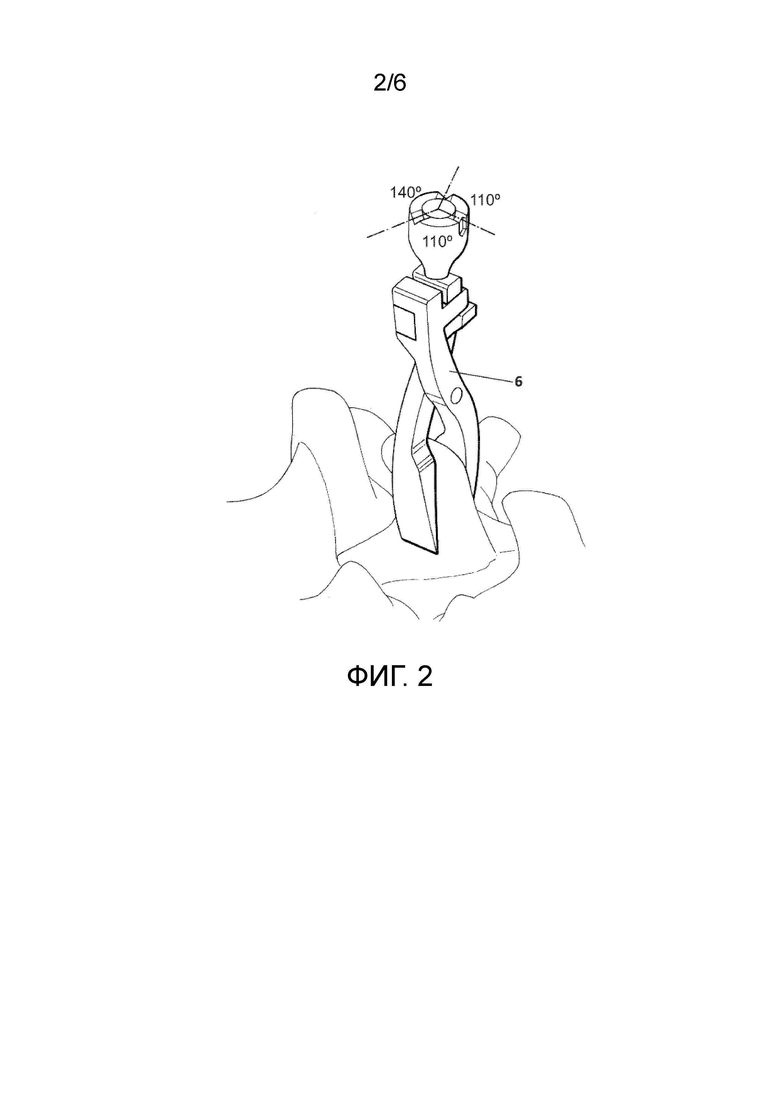
На Фиг.2 представлены детали зажима системы согласно изобретению.
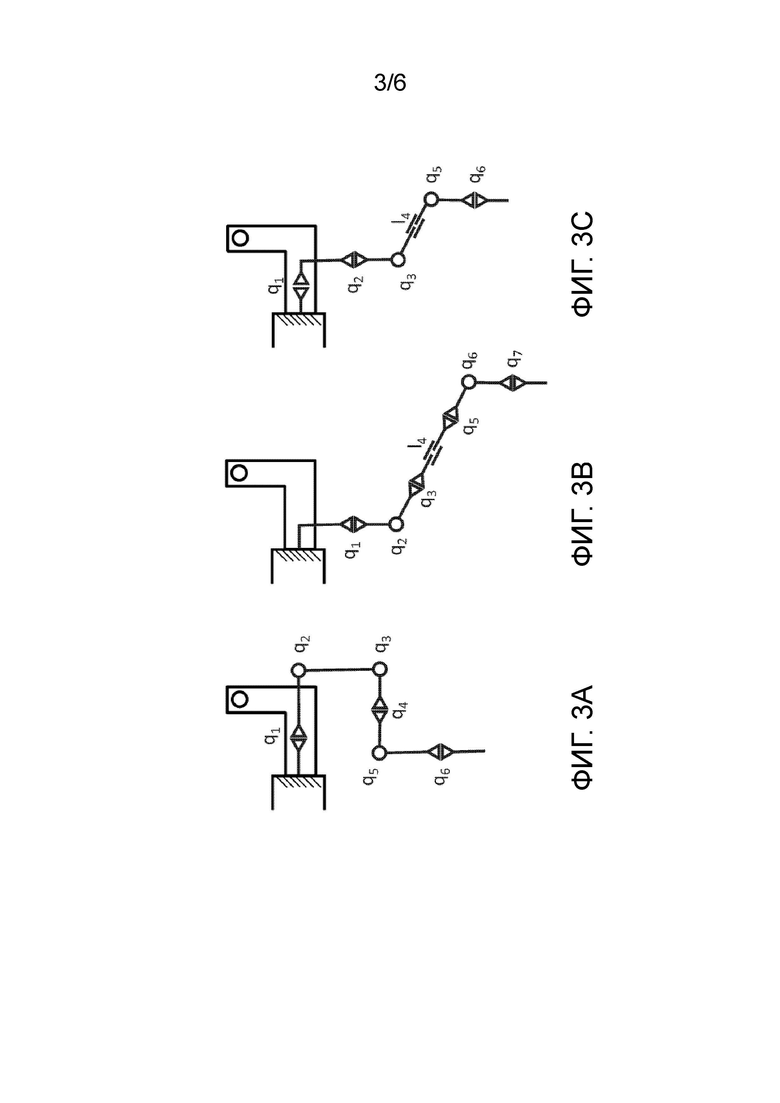
На Фиг.3а–3с представлены три возможных варианта осуществления изобретения, два с шестью и один с семью степенями свободы.
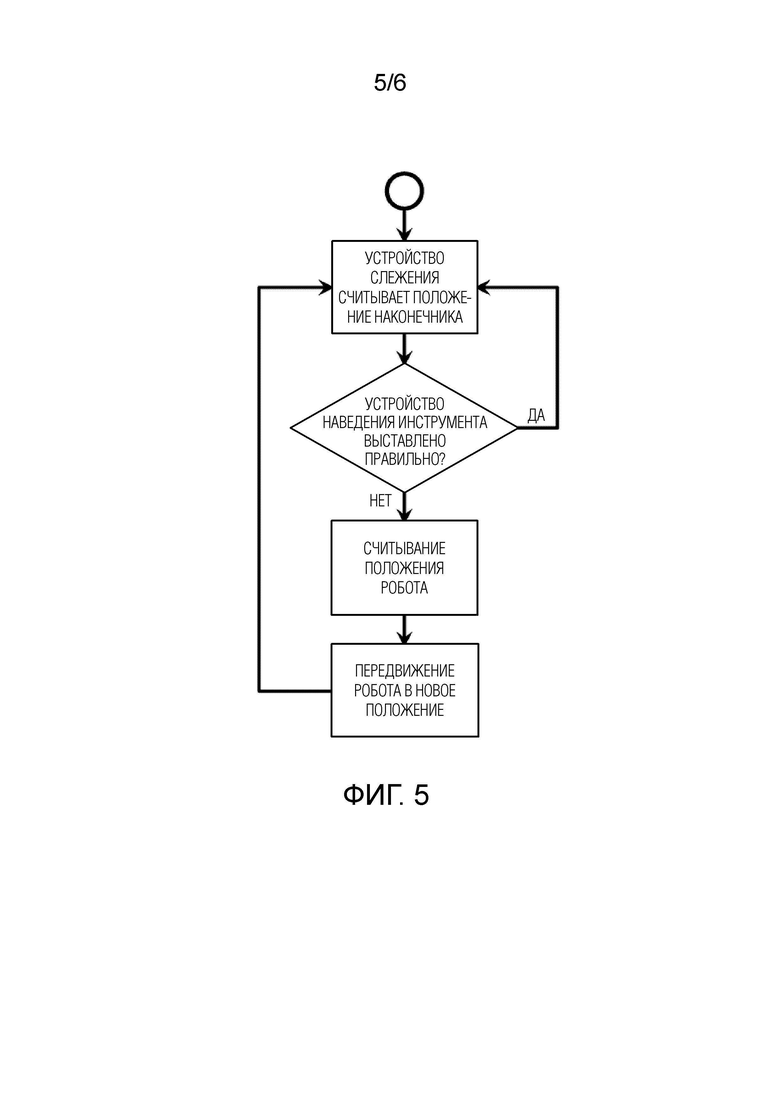
На Фиг.4 и 5 представлены блок–схемы, которые описывают принцип работы изобретения.
На Фиг.6 представлено устройство слежения в положении его калибровки.
ОПИСАНИЕ ПРЕДПОЧТИТЕЛЬНЫХ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
Со ссылкой на Фиг.1 хирургический робот согласно изобретению снабжен устройством слежения. В первом варианте осуществления устройство слежения выполнено из четырех твердых тел или сегментов (1a–1d), соединенных так, что устройство является шарнирно–сочлененным. Устройство слежения имеет по меньшей мере 6 степеней свободы для отслеживания положения (x, y, z) и ориентации (б, в, г) по трем перпендикулярным осям системы координат. Каждая степень свободы постоянно контролируется кодовым датчиком (2) высокого разрешения, таким образом, положение и ориентация наконечника устройства слежения относительно его основания (3) известны в любой определенный момент времени. Основание (3) устройства слежения прикреплено к рабочему органу хирургического робота–манипулятора. Данный рабочий орган также имеет устройство (5) наведения инструмента. Это устройство наведения инструмента будет размещено в пространстве в соответствии с запланированными местоположениями, чтобы позволить хирургу выполнять операцию. Устройство слежения и устройство наведения инструмента оба имеют одно основание для того, чтобы контролировать геометрическую взаимосвязь между устройством наведения инструмента и костью, когда наконечник устройства слежения прикреплен к кости. Точную геометрическую взаимосвязь между устройством наведения инструмента и основанием устройства слежения устанавливают в процессе производства, и она не требует калибровки в течение срока службы системы, поскольку оба элемента принадлежат одному и тому же твердому телу. Во время операции наконечник устройства слежения прикрепляют к зажиму (6), предпочтительно с помощью механизма механического магнитного сочленения, а зажим прикрепляют к кости. Данный механизм сочленения имеет датчик, уведомляющий систему, когда устройство слежения прикреплено к зажиму. Если механизм сочленения неожиданно отсоединяется, срабатывает сигнализация, и роботизированная система переходит в безопасный режим, чтобы гарантировать не причинение вреда.
Важно отметить, что устройство слежения представляет собой легкое механическое устройство, которое оказывает незначительное воздействие на кость. Кроме того, механизм (7) магнитного сочленения гарантирует, что связь, установленную между роботом–манипулятором и зажимом, можно в любое время легко разъединить. Сила магнита такова, что когда две части соединены, наконечник устройства слежения и кость образуют твердое тело. По этим причинам сегменты устройства слежения должны быть изготовлены из материала, который обеспечивает жесткость без значительного увеличения веса всей конструкции. Кроме того, материал должен быть парамагнитным, чтобы избежать распространения магнитного поля, которое генерируется магнитом наконечника устройства слежения, на остальную часть конструкции. Распространение этого магнитного поля вдоль сегментов устройства слежения может повлиять на относительное перемещение между сегментами. Таким требованиям удовлетворяют алюминиевые сплавы, поскольку они имеют высокую удельную прочность. Например, алюминиевый сплав 7075, который используется в различных областях применения, таких как морской флот, автомобили и авиация, является хорошим примером материала, который может быть использован в изобретении. Алюминиевый сплав 7075 является очень прочным материалом с прочностью, сравнимой со многими сталями, его обычно используют при производстве самолетов и в других вариантах аэрокосмического применения. Титан также является подходящим материалом, поскольку он удовлетворяет ранее описанным свойствам. Обычно в таких вариантах применения используют, например, титановый сплав Ti6Al4V. Относительное перемещение между каждым сегментом ограничено использованием шарикоподшипников или игольчатых роликоподшипников с радиальным направлением нагрузки, которые обеспечивают вращательное движение вокруг определенных фиксированных осей. Этими фиксированными осями могут быть продольная ось или поперечная ось каждого соединения или их комбинация. Такие перемещения контролируют поворотными кодовыми датчиками, которые преобразуют угловые положения в цифровые сигналы.
В первом варианте осуществления устройство слежения представляет собой кинематическую цепь (блок шарнирно–сочлененных сегментов) с по меньшей мере шестью степенями свободы (Фиг.1 и 3а). Предпочтительно, устройство слежения имеет четыре шарнирно–сочлененные сегмента и шесть поворотных кодовых датчиков (q1–q6). Первый кодовый датчик отслеживает вращение первого сегмента вдоль его продольной оси. Второй кодовый датчик отслеживает угол, образованный первым и вторым сегментом, то есть вращение вдоль поперечной оси, перпендикулярной плоскости, которая содержит первый и второй сегменты. Третий кодовый датчик отслеживает поперечную ось между вторым и третьим сегментами. Четвертый кодовый датчик отслеживает вращение вдоль продольной оси третьего сегмента. Пятый кодовый датчик отслеживает поперечный угол между третьим и четвертым сегментами. А шестой кодовый датчик отслеживает вращение вдоль продольной оси четвертого сегмента. Вращения и смещения вдоль этих осей определяют уравнения кинематики, которые связывают систему координат основания устройства слежения и систему координат наконечника устройства слежения.
В альтернативном варианте осуществления, показанном на Фиг.3b, устройство слежения может содержать семь степеней свободы, где, например, шесть из них являются угловыми, а одна продольной, то есть сегментом с переменной длиной. При таком подходе степени свободы вращения контролируют поворотными кодовыми датчиками (q1–q3 и q5–q7), а продольную степень свободы контролируют линейным кодовым датчиком (l4). Со ссылкой на Фиг.3b первый кодовый датчик отслеживает угол, образованный первым и вторым сегментом. Второй кодовый датчик отслеживает вращение вдоль продольной оси второго сегмента. Третий кодовый датчик отслеживает угол, образованный вторым и третьим сегментом. Четвертый кодовый датчик является линейным кодовым датчиком, который контролирует изменения длины третьего сегмента. Пятый кодовый датчик отслеживает вращение вдоль продольной оси третьего сегмента. Шестой кодовый датчик отслеживает угол, образованный третьим и четвертым сегментом. А седьмой кодовый датчик отслеживает вращение вдоль продольной оси четвертого сегмента.
В альтернативном варианте осуществления, показанном на Фиг.3с, устройство слежения может содержать шесть степеней свободы, где, например, пять из них угловые, а одна продольная. При таком подходе степени свободы вращения контролируют поворотными кодовыми датчиками (q1–q3 и q5–q6), а продольную степень свободы контролируют линейным кодовым датчиком (l4). Как показано на Фиг.3с, первый кодовый датчик отслеживает вращение первого сегмента вдоль его продольной оси. Второй кодовый датчик отслеживает вращение вдоль продольной оси второго сегмента. Третий кодовый датчик отслеживает угол, образованный вторым и третьим сегментом. Четвертый кодовый датчик – это линейный кодовый датчик, который отслеживает изменения длины третьего сегмента. Пятый кодовый датчик отслеживает угол, образованный третьим и четвертым сегментом. А шестой кодовый датчик отслеживает вращение вдоль продольной оси четвертого сегмента.
Альтернативно, устройство слежения может быть сконструировано с иной комбинацией линейных и поворотных кодовых датчиков. Минимальное требование заключается в том, что движение механической системы обеспечивается с по меньшей мере шестью степенями свободы и что эти перемещения контролируются кодовыми датчиками.
Точное положение и ориентацию наконечника устройства слежения вычисляют в блоке обработки данных, где сигналы кодовых датчиков объединяют с уравнениями кинематики устройства слежения для вывода преобразования, которое определяет соотношение между основанием устройства слежения и концом устройства слежения. Точность устройства слежения зависит от длины сегментов, разрешения кодовых датчиков и процесса изготовления и монтажа самого устройства слежения. Комбинируя четыре сегмента длиной порядка 10 см и шесть поворотных кодовых датчиков с разрешением 16 бит, можно достичь общей теоретической точности порядка 50 мкм.
Поворотные кодовые датчики могут быть по меньшей мере одного из следующих двух типов: абсолютный или инкрементный. Абсолютные кодовые датчики обеспечивают уникальный цифровой код для каждого отдельного угла, поскольку угловое отклонение превышает разрешение кодового датчика. Взаимосвязь между фактическим показанием абсолютного кодового датчика и физическим углом, который он измеряет, устанавливают при сборке системы. Таким образом, устройство слежения, изготовленное из абсолютных кодовых датчиков, способно вычислять положение и ориентацию наконечника непосредственно при включении системы и не требует какого–либо положения калибровки. Инкрементные кодовые датчики измеряют разность углов между угловым положением при включении (или перезагрузке) кодового датчика и его текущим положением. Преимущество этого типа кодовых датчиков состоит в том, что при меньших размерах может быть достигнута более высокая точность. Однако для каждого кодового датчика требуется известное положение калибровки. В настоящем изобретении устройство слежения обеспечивает уникальное положение калибровки с его наконечником, прикрепленным к основанию, для перезагрузки инкрементных кодовых датчиков в известном положении. Данное положение калибровки показано на Фиг.6. Обычное использование устройства слежения, изготовленного из инкрементных кодовых датчиков, начинают с перезагрузки устройства слежения в положении калибровки. Данное положение калибровки можно использовать также в любое время для проверки работоспособности во время обычного использования, чтобы убедиться, что устройство слежения работает должным образом, поскольку инкрементные кодовые датчики должны считывать значение ноль при возвращении в положение, в котором они были перезагружены.
Устройство наведения инструмента должно обеспечивать высокую степень жесткости, поскольку хирург будет выполнять операцию через этот элемент. Кроме того, устройство наведения инструмента непосредственно прикреплено к рабочему органу робота и, следовательно, его вес поддерживается роботом. Этот факт ослабляет ограничительные условия по легковесности, которые представляют другие элементы системы, такие как сегменты устройства слежения. Следовательно, материалом для устройства наведения инструмента может быть нержавеющая сталь, которая тяжелее алюминиевых сплавов, но при этом более жесткая. Устройство наведения инструмента будет размещено роботом в пространстве в соответствии с запланированными местоположениями, чтобы дать хирургу возможность выполнять операцию. Примерами хирургических инструментов, которые можно использовать для вставления транспедикулярного винта через устройство наведения инструмента, являются спицы Киршнера, системы педикулярного доступа, такие как шило или бор, расширители, педикулярные зонды и т. д.
Целевой операцией является вставление транспедикулярных винтов в позвонки, но изобретение также можно распространить на другие виды хирургии. Точное расположение винтов можно спланировать на предоперационном снимке пациента, до того, как пациент войдет в операционную, или можно спланировать во время операции, если имеется интраоперационное трехмерное устройство визуализации, обычно это компьютерная томографическая система (КТ). Планирование операции включает в себя определение размера, расположения и ориентации транспедикулярных винтов в целевых позвонках.
В операционной роботизированная система должна сначала установить точное положение пациента. На этом этапе, называемым регистрацией, положение и ориентацию реального позвонка связывают с предоперационным изображением позвонка, на котором была спланирована операция. Процесс регистрации включает в себя фиксацию зажима в целевой области и получение интраоперационного изображения. На этом этапе определяют точное местоположение и ориентацию зажима по отношению к кости. Если доступен предоперационный план, план переносят на интраоперационное изображение кости. В противном случае хирург планирует точное расположение винтов непосредственно на интраоперационном изображении пациента.
Следует отметить, что зажим крепят к кости и, следовательно, зажим и объект имеют общую систему координат. Как только наконечник устройства слежения соединят с зажимом, целевое местоположение, определенное в системе координат позвонка, может быть преобразовано в систему координат устройства слежения. Таким образом, можно контролировать геометрическую взаимосвязь между устройством наведения инструмента и целевым местоположением. Как показано на Фиг.1, устройство слежения прикреплено к рабочему органу робота, а наконечник или дистальный конец устройства слежения соединен с зажимом (6), который, в свою очередь, прикреплен к кости. В этой ситуации система способна локализовать и отслеживать в реальном времени целевое положение на кости. Таким образом, роботу можно дать команду выставить устройство наведения инструмента по целевому положению и поддерживать эту геометрическую взаимосвязь. Если произойдет движение кости, смещение обнаруживают с помощью устройства слежения, и робот обновляет свое положение, чтобы сохранить выставление устройства наведения инструмента.
Механизм сочленения между наконечником устройства слежения и зажимом основан на системе магнитного кинематического сочленения (Фиг.2), которая содержит две части, каждая из которых содержит магнит, причем магниты имеют противоположную полярность, так что при взаимодействии друг с другом они образуют сочленение. Часть, соответствующая основанию механизма сочленения, предусмотрена на зажиме, а другая часть, соответствующая верхней части механизма сочленения, предусмотрена на устройстве слежения, прикрепленном к последнему из сегментов на дистальном конце. Предпочтительно три V–образных паза на части зажима и три сферы на части устройства слежения вместе с магнитами обеспечивают механическое сочленение. Это сочленение создает точный и повторяемый интерфейс между двумя твердыми телами. Эта система обеспечивает шесть точек соприкосновения – по две на сферу – чтобы гарантировать, что механизм сочленения ограничивает шесть степеней свободы (три степени свободы для положения и еще три для вращения) относительного перемещения между зажимом и наконечником устройства слежения. Магнит в центре каждой части обеспечивает прочность, необходимую для предотвращения любого относительного перемещения между зажимом и наконечником устройства слежения. Сила магнита такова, что она обеспечивает соединение между зажимом и устройством слежения во время движения робота. Однако эта сила такова, что оператор–человек может разорвать соединение, чтобы иметь возможность в любое время легко удалить систему. Наиболее устойчивое кинематическое сочленение будет получено, когда три V–образных паза образуют углы 120°. Однако для изобретения предпочтительно, чтобы три V–образных паза образовывали три угла, так чтобы механизм сочленения можно было задействовать только в уникальном положении. Например, углы 110°, 110° и 140° гарантируют, что механизм сочленения задействован в уникальном положении. Для этого по меньшей мере один из углов должен отличаться от двух других.
Когда устройство слежения соединено с зажимом, робот может работать в различных режимах. Можно дать ему указание перейти на запланированное положение, причем запланированное положение выражено в системе координат зажима устройства слежения. Эта операция проиллюстрирована блок–схемой на Фиг.4. В стационарном положении, при неподвижности кости, робот остановится, когда устройство наведения инструмента достигнет определенного положения. В другом режиме устройство наведения инструмента уже выставлено с целевым местоположением, и робот обновляет свое положение, чтобы сохранить это выставление, компенсируя движение кости. Этот второй режим работы проиллюстрирован блок–схемой на Фиг.5. Следует отметить, что в этом режиме робот никогда не останавливается, поскольку он постоянно обновляет свое положение, чтобы сохранить выставление устройства наведения инструмента и целевого местоположения.
Зажим и устройство слежения могут представлять собой механизм обнаружения, который уведомляет систему, когда устройство слежения прикреплено к зажиму. Этот механизм обнаружения содержит электрическую цепь, соединенную с блоком обработки данных, который способен идентифицировать, когда соединение было установлено. Нижняя часть механизма сочленения снабжена пассивной электрической цепью, а верхняя часть соединяет нижнюю часть с блоком обработки данных. Блок обработки данных подает небольшое напряжение, поэтому, когда соединение установлено, электрическая цепь замыкается и обнаруживается ток. Для этого сферы механизма кинематического сочленения изготовлены из электропроводящего материала и электрически соединены с блоком обработки данных. V–образные пазы имеют электропроводящий участок, в котором сферы вводят в соприкосновение, чтобы установить электрическое соединение между верхней и нижней частью.
Используемый здесь термин «содержит» и его производные (такие как «содержащий» и т.д.) не следует понимать в исключающем смысле, то есть эти термины не следует интерпретировать как исключающие возможность того, что описано и определено может содержать дополнительные элементы, этапы и т.д.
С другой стороны, изобретение, очевидно, не ограничено описанным в данном документе конкретным вариантом (вариантами) осуществления, но также охватывает любые варианты, которые могут быть предусмотрены любым специалистом в данной области техники (например, в отношении выбора материалов, размеров, компонентов, конфигурации и т.д.) и находятся в пределах общего объема изобретения, определенного в формуле изобретения.



Изобретение относится к медицине, а именно к хирургическим роботам для отслеживания и компенсации движения кости. Хирургический робот содержит манипулятор робота и устройство слежения. Манипулятор робота содержит рабочий орган. Манипулятор робота содержит устройство наведения инструмента на рабочем органе. Устройство слежения содержит основание, дистальный конец, блок шарнирно-сочлененных сегментов и кодовые датчики. Основание устройства слежения фиксировано к рабочему органу манипулятора робота. Дистальный конец устройства слежения выполнен соединяемым с зажимом. Блок шарнирно-сочлененных сегментов образует кинематическую цепь, которая соединяет основание с дистальным концом. Кодовые датчики связаны с шарнирно-сочлененными сегментами для отслеживания движения этих шарнирно-сочлененных сегментов. Движение устройства слежения обеспечивается и контролируется с по меньшей мере шестью степенями свободы. Достигается снижение ошибок позиционирования и ориентации рабочего органа манипулятора робота. 9 з.п. ф-лы, 8 ил.
1. Хирургический робот для отслеживания и компенсации движения кости, содержащий:
- манипулятор робота, содержащий рабочий орган, причем манипулятор робота дополнительно содержит устройство (5) наведения инструмента на рабочем органе,
отличающийся тем, что хирургический робот дополнительно содержит:
- устройство (1) слежения, содержащее:
- основание (3), фиксированное к рабочему органу манипулятора робота,
- дистальный конец, выполненный соединяемым с зажимом (6),
- блок шарнирно-сочлененных сегментов (1a-1d), образующий кинематическую цепь, которая соединяет основание (3) с дистальным концом, и
- кодовые датчики (2), связанные с шарнирно-сочлененными сегментами (1а-1d) для отслеживания движения этих шарнирно-сочлененных сегментов (1а-1d),
при этом движение устройства (1) слежения обеспечивается и контролируется с по меньшей мере шестью степенями свободы.
2. Хирургический робот по п.1, причем устройство (1) слежения имеет четыре шарнирно-сочлененных сегмента (1а-1d) и шесть связанных поворотных кодовых датчиков (q1-q6).
3. Хирургический робот по п.1, причем устройство (1) слежения имеет четыре шарнирно-сочлененных сегмента (1а-1d) и пять связанных поворотных кодовых датчиков (q1-q5), и один из шарнирно-сочлененных сегментов способен изменять свою длину и имеет связанный линейный кодовый датчик (I4), так что движение обеспечивается и контролируется с шестью степенями свободы.
4. Хирургический робот по п.1, причем устройство (1) слежения имеет четыре шарнирно-сочлененных сегмента (1а-1d) и шесть связанных поворотных кодовых датчиков (q1-q6), и один из шарнирно-сочлененных сегментов способен изменять свою длину и имеет связанный линейный кодовый датчик (I4), так что движение обеспечивается и контролируется с семью степенями свободы.
5. Хирургический робот по любому из предыдущих пунктов, причем шарнирно-сочлененные сегменты (1а-1d) изготовлены из парамагнитного материала.
6. Хирургический робот по п.5, дополнительно снабженный зажимом (6), при этом зажим (6) посредством механизма (7) кинематического сочленения прикреплен с возможностью отделения к шарнирно-сочлененному сегменту (1а-1d) дистального конца устройства (1) слежения, предназначенного быть ближним к пациенту.
7. Хирургический робот по п.6, причем механизм (7) кинематического сочленения содержит:
- нижнюю часть, расположенную на зажиме (6) и снабженную первым магнитом, и
- верхнюю часть, расположенную на устройстве (1) слежения и фиксированную к последнему шарнирно-сочлененному сегменту устройства (1) слежения на дистальном конце, причем верхняя часть снабжена вторым магнитом противоположной полярности по отношению к первому магниту.
8. Хирургический робот по п.6, причем механизм (7) кинематического сочленения снабжен в его верхней части тремя сферами и в его нижней части тремя V-образными пазами, причем пазы образуют три угла, при этом по меньшей мере один из этих углов отличается от двух других, так что сферы и пазы взаимодействуют друг с другом, образуя сочленение.
9. Хирургический робот по п.8, причем сферы механизма (7) кинематического сочленения изготовлены из электропроводящего материала и электрически соединены с блоком обработки данных, а V-образные пазы представляют собой электропроводящую секцию.
10. Хирургический робот по любому из предыдущих пунктов, причем шарнирно-сочлененные сегменты (1а-1d) устройства (1) слежения содержат алюминиевый сплав или титановый сплав.
| US 6322567 B1, 27.11.2001 | |||
| РОБОТИЧЕСКАЯ СИСТЕМА ДЛЯ МИНИ-ИНВАЗИВНОЙ ХИРУРГИИ | 2012 |
|
RU2491161C1 |
| US 2009306499 A1, 10.12.2009 | |||
| US 20170112505 A1, 27.04.2017 | |||
| WO 2011035792 A1, 31.03.2011 | |||
| US 2013096573 A1, 18.04.2013. | |||

