Изобретение относится к авиационной технике, в частности к летательным аппаратам (ЛА) вертикального и укороченного взлета и посадки.
Известен беспилотный летательный аппарат вертикального взлета и посадки DeltaQuad [1]. DeltaQuad представляет собой самолет, который содержит маршевую силовую установку для горизонтального полета, две пары подъемных силовых установок для создания тяги в вертикальной плоскости в режиме висения, где одна пара подъемных винтов размещена в задней части крыла, а другая пара подъемных винтов - в передней части крыла.
Наличие подъемных силовых установок делает из обычного самолета летательный аппарат гибридной схемы вертикального взлета и посадки, но при этом плоскости круга подъемных винтов имеют тот же не изменяющийся в полете угол, что и несущие площади (в данном случае крыло). В результате полученный гибридный самолет нестабилен и неэффективен в переходных режимах. Он не может разгоняться за счет подъемных винтов без выхода на отрицательные углы атаки. Разгон до нужный скорости за счет только одного маршевого мотора в данной схеме является затруднительным, так как работающие подъемные винты будут создавать сопротивление по мере разгона и вносить дестабилизацию в канале тангажа за счет значительного смещения центра давления вперед относительно центра масс летательного аппарата.
Известен патент [2]. Известный летательный аппарат вертикального взлета и посадки содержит маршевую силовую установку для горизонтального полета в самолетном режиме, как минимум от трех отдельных подъемных силовых установок для создания тяги в вертикальной плоскости. Воздушные винты подъемных силовых установок установлены таким образом, что плоскость их вращения расположена под углом от 2 до 35 градусов к несущим плоскостям крыла или крыльев. Способ управления полетом летательного аппарата характеризуется тем, что в момент взлета летательный аппарат в режиме висения располагается с положительным углом тангажа от 2-х до 3 5-ти градусов, для набора достаточной скорости на подъемных двигателях осуществляют наклон всего летательного аппарата вперед до угла тангажа, обеспечивающего горизонтальный полет в самолетном режиме, после достижения необходимой скорости (1,1-1,5 скорости сваливания) подъемные двигатели отключают. Фактически, описанный летательный аппарат в самолетном режиме несет на себе лишний вес в виде неработающих подъемных силовых установок, что существенно снижает его энергоэффективность. Также к недостаткам подобного аппарата и способа управления его полетом следует отнести дополнительное аэродинамическое сопротивление неподвижных винтов подъемных силовых установок.
Известен летательный аппарат вертикального взлета и посадки [3], который содержит фюзеляж, киль, шасси, сочлененное крыло, два подъемно-маршевых вентилятора, каждый из которых состоит из винта в профилированном кольце с независимо управляемым приводом поворота, силовую установку с одним или более двигателями, узлом передачи вращающего момента от двигателя на приводные валы подъемно-маршевых вентиляторов и устройством управления тангажом. При этом подъемно-маршевые вентиляторы закреплены вблизи центра масс, симметрично относительно оси летательного аппарата на силовой балке, жестко соединенной с фюзеляжем. В качестве устройства управления тангажом используют двигатель с фенестроном, расположенным в хвостовой части фюзеляжа. Основным недостатком аналога является наличие приводов поворота подъемно-маршевых вентиляторов, что снижает надежность его системы управления, усложняет конструкцию и увеличивает вес пустого летательного аппарата. Кроме этого, переход из вертикального взлета в горизонтальный полет осуществляется через режим, в котором одни и те же подъемно-маршевые вентиляторы используются и для создания подъемной силы, и для разгона аппарата, что значительно снижает его маневренность в данном режиме, а также накладывает ограничение на минимальное время перехода от вертикального взлета к горизонтальному полету.
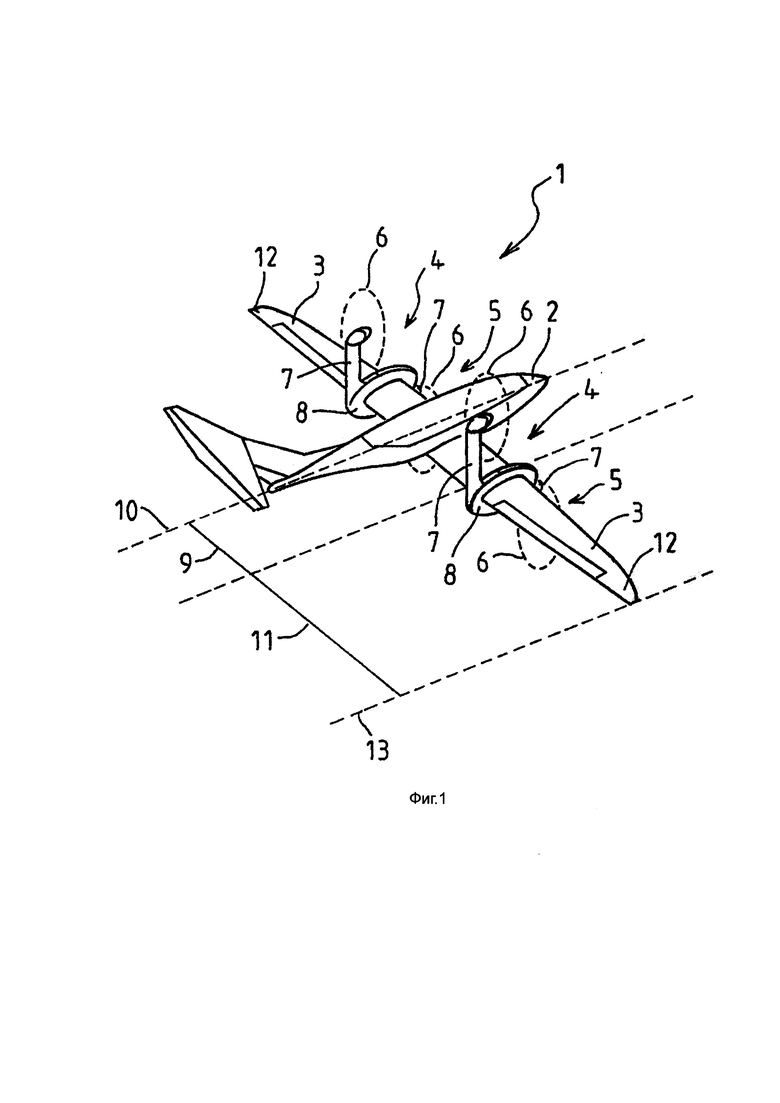
Наиболее близким аналогом, выбранным за прототип, является летательный аппарат вертикального взлета [4], приведенный на Фиг. 1. Летательный аппарат (1) вертикального взлета с крылом (3) содержит первый блок (4) двигателя и второй блок (5) двигателя, установленные на этом крыле (3) с возможностью поворота при помощи рычага (7). Первый блок (4) двигателя и второй блок (5) двигателя расположены на крыле (3) на расстоянии от его законцовки (12). Расстояние от первого блока (4) двигателя до продольной оси (10) летательного аппарата (1) приблизительно равно расстоянию от второго блока (5) двигателя до продольной оси (10) летательного аппарата (1). В положении горизонтального полета первый блок (4) двигателя находится на крыле над поверхностью крыла, а второй блок (5) двигателя находится на крыле под плоскостью крыла. В положении вертикального полета первый блок (4) двигателя и второй блок (5) двигателя расположены в одной, по существу горизонтальной плоскости.
Как утверждает автор изобретения, таким образом обеспечиваются стабильные летные характеристики при вертикальном взлете и посадке. Однако, из приведенной схемы очевидно, что на переходном режиме от вертикального взлета к горизонтальному полету, когда рулевые аэродинамические поверхности еще не эффективны продольная устойчивость и управляемость аналога главным образом определяется длиной рычага (7) и быстротой (темпом) создания разности тяг между первым (4) и вторым (5) блоками двигателя. Для получения заданного момента в продольном канале (кабрирование, пикирование) необходимо либо увеличивать длину рычага (7), что ведет к утяжелению конструкции аппарата, либо при небольшой величине рычага (7) иметь возможность быстро создать потребную разность тяг между блоками двигателей, что тоже проблематично, учитывая естественную инерционность двигателя. Также недостатком аналога является наличие устройства поворота блоков двигателей (4) и (5), что снижает надежность его системы управления, усложняет конструкцию и увеличивает вес пустого летательного аппарата.
Задачей изобретения является решение проблемы несовершенства компоновок имеющихся на рынке летательных аппаратов вертикального взлета и посадки, в результате чего они, во-первых, не могут совершать качественные переходы из режима висения в режим горизонтального полета по самолетному и обратно, во-вторых, значительно проигрывают по энергоэффективности горизонтального полета самолетам обычных схем и, в-третьих, имеют более сложную и менее надежную систему управления (при использовании поворотных двигателей), нежели самолеты обычных схем.
Технический результат заявленного изобретения заключается в снижении времени перехода из режима висения в режим горизонтального полета и обратно, улучшении характеристик устойчивости и управляемости на переходном режиме, увеличении энергоэффективности горизонтального полета, упрощении системы управления и повышении ее надежности.
Указанный технический результат достигается за счет того, что заявленный аппарат вертикального взлета и посадки содержит как минимум от четырех отдельных силовых установок для создания тяги в вертикальной плоскости, из которых как минимум две используются и в качестве маршевых для горизонтального полета в самолетном режиме. При этом четное число силовых установок, использующихся в качестве маршевых для горизонтального полета в самолетном режиме закреплены по обе стороны как минимум одного коромысла, которое поворачивается в плоскости, совпадающей, либо параллельной плоскости симметрии летательного аппарата, исключительно за счет разности тяг установленных на нем силовых установок с целью увеличения горизонтальной составляющей их суммарной тяги. Силовые установки, не использующиеся в качестве маршевых для горизонтального полета в самолетном режиме, используются в качестве органов управления по крену и тангажу и могут поворачиваться относительно несущих плоскостей таким образом, что при изменении угла тангажа летательного аппарата вектор их тяги совпадает по направлению с вектором ускорения свободного падения.
Заявленный способ управления полетом летательного аппарата характеризуется тем, что в момент взлета летательного аппарата в режиме висения коромысло располагается горизонтально, а после взлета для набора горизонтальной скорости осуществляется постепенный поворот коромысла с силовыми установками за счет разности тяг, при этом силовые установки вне коромысла обеспечивают наклон всего летательного аппарата в вертикальной плоскости до угла тангажа, обеспечивающего горизонтальный полет в самолетном режиме. После достижения необходимой скорости коромысло поворачивается в вертикальное положение. Обеспечивается снижение времени перехода из режима висения в режим горизонтального полета и обратно, улучшение характеристик устойчивости и управляемости на переходном режиме, увеличение энергоэффективности горизонтального полета, упрощение системы управления и повышение ее надежности.
Краткое описание чертежей.
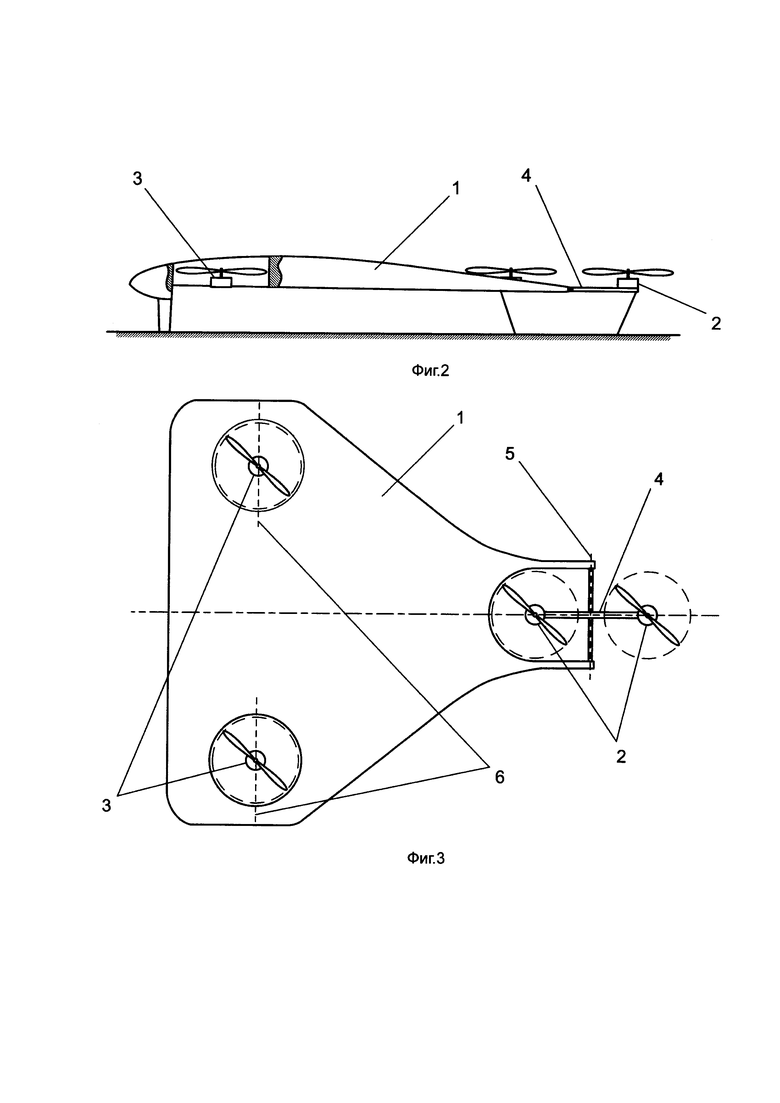
На Фиг. 2 показано устройство летательного аппарата, вид сбоку, где:
1 - Летательный аппарат вертикального взлета и посадки;
2 - Подъемно-маршевые силовые установки,
3 - Подъемные силовые установки, используемые в качестве органов управления по крену и тангажу в горизонтальном полете;
4 - Коромысло;
На Фиг. 3 - устройство летательного аппарата, вид сверху, где:
1 - Летательный аппарат вертикального взлета и посадки;
2 - Подъемно-маршевые силовые установки,
3 - Подъемные силовые установки, используемые в качестве органов управления по крену и тангажу в горизонтальном полете;
4 - Коромысло;
5 - Ось вращения коромысла;
6 - Ось свободного вращения силовых установок, используемых в качестве органов управления по крену и тангажу в горизонтальном полете;
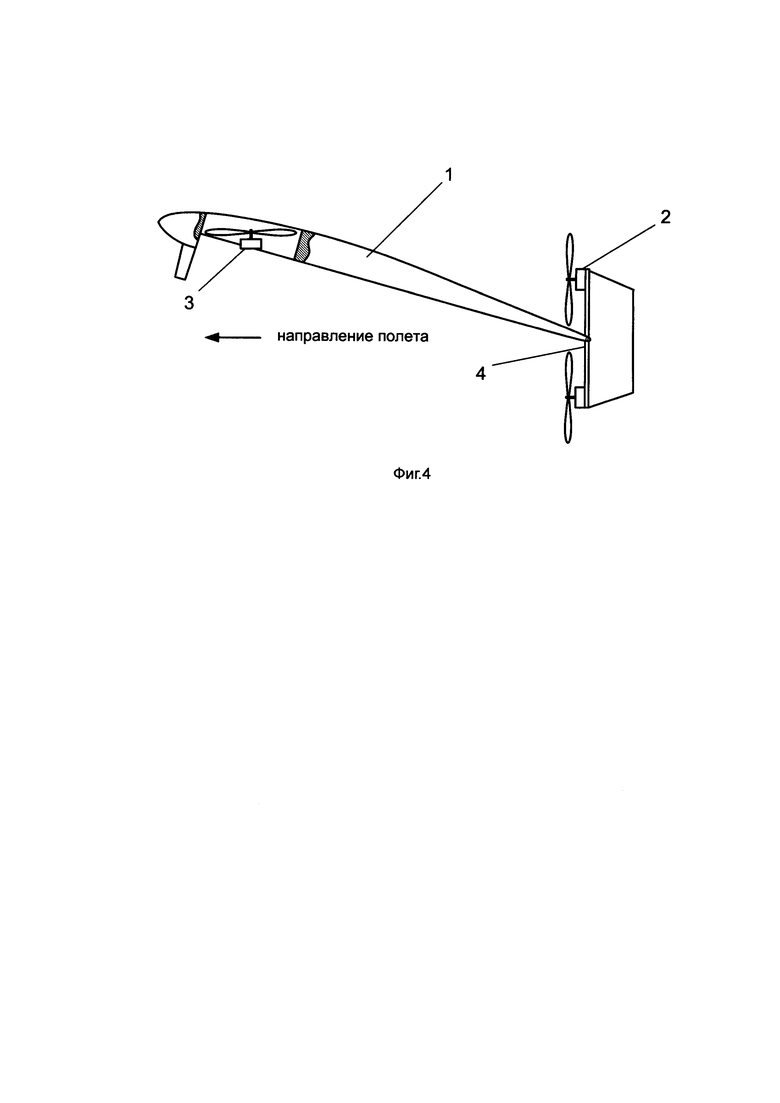
На Фиг. 4 показано устройство летательного аппарата в горизонтальном полете, вид сбоку (обозначения аналогичны обозначениям на Фиг. 2). Осуществление изобретения.
Изобретение реализуется на базе летательного аппарата вертикального взлета и посадки 1, например, схемы летающее крыло (см. Фиг. 2 - Фиг. 4), на котором размещены пара подъемно-маршевых силовых установок 2 и пара подъемных силовых установок 3, используемых для создания вертикальной тяги в режиме висения. Пара подъемно-маршевых силовых установок 2 непосредственно размещена на концах коромысла 4, которое может поворачиваться относительно оси 5 (см. Фиг. 3). В свою очередь, пара силовых установок 3 может независимо друг от друга свободно поворачиваться относительно оси 6 (см. Фиг. 3).
Указанные конструктивные особенности летательного аппарата позволяют решить задачу изобретения и добиться заявленного технического результата. Вертикальный взлет летательного аппарата осуществляется за счет тяги пар силовых установок 2 и 3 (см. Фиг. 2 - Фиг. 3). Причем центр масс каждой силовых установок в паре 3 располагается ниже оси вращения 6, что обеспечивает ориентацию тяги этих установок строго вертикально вниз, вне зависимости от ориентации самого летательного аппарата в вертикальной плоскости (см. Фиг. 4). Поворот коромысла 4 может обеспечить ориентацию пары силовых установок 2 в положение, практически перпендикулярное направлению полета, что позволяет использовать их в качестве маршевых в горизонтальном полете (см. Фиг. 4). Особенность конструкции, реализующей изобретение - поворот коромысла 4 с силовыми установками 2 после взлета для набора горизонтальной скорости осуществляется только за счет разности тяг, без использования каких-либо дополнительных приводов поворота. Сам угол поворота коромысла 4 может быть ограничен для предотвращения последствий аварийных ситуаций при отказе одной из пары подъемно-маршевых силовых установок 2. Расположение пары силовых установок 3 впереди центра масс аппарата исключает потери подъемной силы на его продольную балансировку.
Предлагаемая компоновка позволяет аппарату вертикально взлетать (см. Фиг. 2), а затем, установив необходимый угол атаки несущих поверхностей, набирать по мере поворота коромысла 4 достаточную скорость для осуществления полета в самолетном режиме за счет тяги подъемно-маршевых двигателей 2 (см. Фиг. 4). Иными словами, летательный аппарат 1 после взлета переводится в режим висения с положительным углом атаки и, соответственно тангажа, разгоняется в горизонтальной плоскости, а после достижения необходимой скорости (1,1-1,5 скорости сваливания) коромысло 4 становится практически перпендикулярно полету и двигатели 2 на нем создают только горизонтальную тягу.
Предлагаемая компоновка аппарата, а также способ управления позволяют реализовать не только вертикальный взлет с последующим переходом в горизонтальный полет, но и взлетать под некоторым углом к поверхности, затем также переходя к горизонтальному полету.
Источники информации
1. https://www.deltaquad.com/, опубл.: 2016
2. Патент РФ на изобретение «Летательный аппарат вертикального взлета и посадки и способ управления его полетом» №2638221 от 12.12.2017
3. Патент РФ на полезную модель «Летательный аппарат вертикального взлета и посадки» №141669 от 10.06.2014
4. Патент РФ на изобретение «Летательный аппарат вертикального взлета» №2627261 от 04.08.2017
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ПОЛЕТОМ ЛЕТАТЕЛЬНОГО АППАРАТА С ФИКСИРОВАННЫМ КРЫЛОМ С ВОЗМОЖНОСТЬЮ ВЫПОЛНЕНИЯ ВЕРТИКАЛЬНОГО ВЗЛЕТА И ПОСАДКИ | 2021 |
|
RU2776523C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ ВЕРТИКАЛЬНОГО ВЗЛЕТА И ПОСАДКИ И СПОСОБ УПРАВЛЕНИЯ ЕГО ПОЛЕТОМ | 2016 |
|
RU2638221C2 |
| Летательный аппарат вертикального взлета и посадки и аэромеханический способ управления поворотом его подъемно-маршевых силовых установок | 2020 |
|
RU2753312C1 |
| Беспилотный летательный аппарат вертикального взлета и посадки | 2017 |
|
RU2716391C2 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ ВЕРТИКАЛЬНОГО ВЗЛЕТА И ПОСАДКИ | 2015 |
|
RU2619976C2 |
| САМОЛЕТ ВЕРТИКАЛЬНОГО ВЗЛЕТА И ПОСАДКИ С НЕСУЩИМ ВИНТОМ СО СВОРАЧИВАЮЩИМИСЯ УБИРАЕМЫМИ ЛОПАСТЯМИ | 2019 |
|
RU2727787C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ ВЕРТИКАЛЬНОГО ВЗЛЕТА И ПОСАДКИ | 2024 |
|
RU2840912C1 |
| САМОЛЕТ ВЕРТИКАЛЬНОГО ВЗЛЕТА И ПОСАДКИ | 1999 |
|
RU2162809C2 |
| Конвертируемый летательный аппарат | 2019 |
|
RU2723104C1 |
| Экраноплан с двигательной установкой, выполненной по схеме мультикоптера | 2023 |
|
RU2833275C1 |
Изобретение относится к области авиации, в частности к конструкциям летательных аппаратов (ЛА) вертикального взлета и посадки. ЛА вертикального взлета и посадки содержит как минимум от четырех отдельных силовых установок для создания тяги в вертикальной плоскости, из них как минимум две используются в качестве маршевых для горизонтального полета в самолетном режиме. Остальные силовые установки при горизонтальном полете в самолетном режиме используются в качестве органов управления по крену и тангажу. Эти силовые установки могут свободно поворачиваться относительно несущих плоскостей таким образом, что при изменении угла тангажа ЛА вектор их тяги совпадает по направлению с вектором ускорения свободного падения. Четное число силовых установок, использующихся в качестве маршевых для горизонтального полета в самолетном режиме, закреплены по обе стороны как минимум одного коромысла, имеющего возможность свободно поворачиваться в плоскости, совпадающей либо параллельной плоскости симметрии ЛА. Обеспечивается снижение времени перехода из режима висения в режим горизонтального полета и обратно, улучшение характеристик устойчивости и управляемости на переходном режиме. 2 н. и 1 з.п. ф-лы, 4 ил.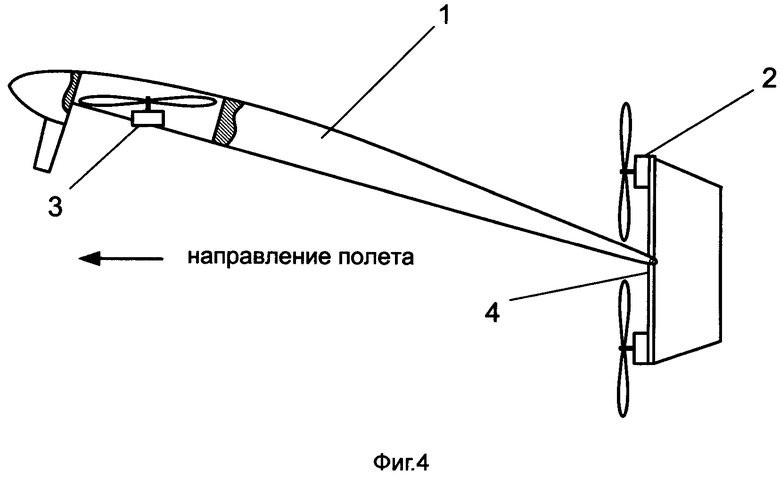
1. Летательный аппарат вертикального взлета и посадки, содержащий как минимум четыре отдельных силовых установки для создания тяги в вертикальной плоскости, из которых как минимум две используются и в качестве маршевых для горизонтального полета в самолетном режиме, отличающийся тем, что четное число силовых установок, использующихся в качестве маршевых для горизонтального полета в самолетном режиме, закреплены по обе стороны как минимум одного коромысла с возможностью его поворота в плоскости, совпадающей либо параллельной плоскости симметрии летательного аппарата, исключительно за счет разности тяг, установленных на нем силовых установок.
2. Летательный аппарат по п. 1, отличающийся тем, что силовые установки, не использующиеся в качестве маршевых для горизонтального полета в самолетном режиме, выполнены с возможностью использования в качестве органов управления по крену и тангажу и могут поворачиваться относительно несущих плоскостей таким образом, что при изменении угла тангажа летательного аппарата вектор их тяги совпадает по направлению с вектором ускорения свободного падения.
3. Способ управления полетом заявленного летательного аппарата, характеризующийся тем, что в момент взлета летательного аппарата в режиме висения коромысло с силовыми установками располагают горизонтально, после взлета для набора горизонтальной скорости осуществляют постепенный его поворот за счет разности тяг, установленных на нем силовых установок, вплоть до вертикального положения, при этом силовые установки вне коромысла обеспечивают наклон всего летательного аппарата в вертикальной плоскости до угла тангажа, обеспечивающего горизонтальный полет в самолетном режиме.
| ЛЕТАТЕЛЬНЫЙ АППАРАТ ВЕРТИКАЛЬНОГО ВЗЛЕТА | 2013 |
|
RU2627261C2 |
| Аэромеханический способ управления конфигурацией и режимом полета конвертируемого летательного аппарата (конвертоплана) | 2017 |
|
RU2700323C2 |
| KR 101554487 B1, 21.09.2015 | |||
| US 20190152593 A1, 23.05.2019 | |||
| CN 110506003 A, 26.11.2019. | |||

