Изобретение относится к авиационной технике, в частности к комбинированным летательным аппаратам (ЛА) вертикального взлета и посадки.
Известен патент РФ на изобретение №2638221 от 12.12.2017 [1]. Летательный аппарат вертикального взлета и посадки содержит маршевую силовую установку для горизонтального полета в самолетном режиме, содержащую как минимум от трех отдельных подъемных силовых установок для создания тяги в вертикальной плоскости. Воздушные винты подъемных силовых установок установлены таким образом, что плоскость их вращения расположена под углом от 2 до 35 градусов к несущим плоскостям крыла или крыльев. Крыло и «У»-образное хвостовое оперение содержат аэродинамические поверхности управления, используемые при полете в самолетном режиме.
Способ управления полетом летательного аппарата характеризуется тем, что в момент взлета летательный аппарат в режиме висения располагается с положительным углом тангажа от 2-х до 35-ти градусов. Для набора достаточной скорости на подъемных двигателях осуществляется наклон всего летательного аппарата вперед до угла тангажа, обеспечивающего горизонтальный полет в самолетном режиме. После достижения необходимой скорости (1,1-1,5 скорости сваливания) подъемные двигатели отключают. Дальнейший полет выполняется на тяге маршевой силовой установки. Управление полетом в самолетном режиме осуществляется с помощью аэродинамических поверхностей управления, расположенных на крыле и хвостовом оперении.
Фактически, описанный летательный аппарат в самолетном режиме несет на себе лишний вес в виде неработающих подъемных силовых установок. Это существенно снижает его энергоэффективность. Кроме того, неподвижные винты подъемных силовых установок создают дополнительное аэродинамическое сопротивление, ухудшающее аэродинамическое качество летательного аппарата.
Управление описанным летательным аппаратом с помощью аэродинамических поверхностей управления является невозможным на вертикальных и переходных режимах (от режима вертикального взлета к самолетному; а также от самолетного режима к вертикальной посадке) вследствие крайне малого скоростного напора. В указанных режимах аэродинамические рули неработоспособны. Также стоит отметить низкую эффективность аэродинамических органов управления в самолетном режиме полета при попадании в условия малых скоростей и больших углов атаки, которые могут привести к полной потере управляемости и потере самого летательного аппарата. Перечисленные негативные явления могут иметь место при воздействии на указанный летательный аппарат атмосферной турбулентности.
Наиболее близким аналогом по способу управления является летательный аппарат, описанный в патенте РФ на изобретение №2746770 от 20.04.2021 [2]. Автором изобретения предложено несколько вариантов летательного аппарата:
1) Летательный аппарат вертикального взлета и посадки, содержащий как минимум четыре отдельных силовых установки для создания тяги в вертикальной плоскости, из которых как минимум две используются и в качестве маршевых для горизонтального полета в самолетном режиме. При этом четное число силовых установок, использующихся в качестве маршевых для горизонтального полета в самолетном режиме, закреплены по обе стороны как минимум одного коромысла с возможностью его поворота в плоскости, совпадающей либо параллельной плоскости симметрии летательного аппарата, исключительно за счет разности тяг, установленных на нем силовых установок.
2) Летательный аппарат, силовые установки которого, при отсутствии использования в качестве маршевых для горизонтального полета в самолетном режиме, выполнены с возможностью использования в качестве органов управления по крену и тангажу и могут поворачиваться относительно несущих плоскостей таким образом, что при изменении угла тангажа летательного аппарата вектор их тяги совпадает по направлению с вектором ускорения свободного падения.
При этом все варианты данного ЛА, по утверждению автора, обладают способностью к вертикальному взлету, висению и переходу в самолетный режим полета. Однако в описанных вариантах летательного аппарата полностью отсутствует возможность управления в путевом канале, что делает невозможным управляемый и безопасный полет данного ЛА в любом из рассматриваемых режимов.
Способ управления полетом летательного аппарата [2] характеризуется тем, что в момент взлета летательного аппарата в режиме висения коромысло с силовыми установками располагают горизонтально, а после взлета для набора горизонтальной скорости осуществляют постепенный его поворот за счет разности тяг установленных на нем силовых установок, вплоть до вертикального положения. При этом силовые установки вне коромысла обеспечивают наклон всего летательного аппарата в вертикальной плоскости до угла тангажа, обеспечивающего горизонтальный полет в самолетном режиме.
В предлагаемом автором способе управления ЛА [2] в самолетном режиме отсутствует возможность управления в продольном канале в полном объеме. Так, при установке коромысла в вертикальное положение (для обеспечения работы подъемно-маршевой силовой установки в маршевом режиме) данный ЛА полностью лишается управления в продольном канале в сторону уменьшения углов тангажа, т.к. любая разница в тяге верхнего и нижнего элементов подъемно-маршевой силовой установки будет приводить лишь к их вращению вокруг оси коромысла, а не к созданию моментов, управляющих положением ЛА.
Задачей изобретения является создание способа управления летательным аппаратом, обеспечивающего необходимые характеристики устойчивости и управляемости на всех возможных режимах полета ЛА с фиксированным крылом, используя одни и те же органы управления положением ЛА в пространстве.
Техническим результатом заявляемого изобретения является:
1. Обеспечение необходимых характеристик устойчивости, управляемости и маневренности на всех возможных режимах эксплуатации ЛА.
2. Увеличение аэродинамического качества, весовой отдачи конструкции и энергоэффективности горизонтального полета.
3. Улучшение характеристик устойчивости и управляемости на малых скоростях, на больших углах атаки крыла и при воздействии атмосферной турбулентности.
4. Сокращение времени перехода из режима висения в режим горизонтального полета и обратно.
5. Упрощение системы управления летательным аппаратом за счет эффективного использования одних и тех же органов управления на всех возможных режимах эксплуатации ЛА.
Заявляемый способ управления полетом летательного аппарата с фиксированным крылом характеризуется тем, что на этапах взлета (и посадки), висения, перехода в самолетный режим полета и при полете в самолетном режиме все управляющие моменты во всех каналах управления (тангажа, крена, курса) создаются дифференциальным изменением тяги подъемных силовых установок. Потребная для горизонтального полета тяга создается маршевой силовой установкой. По мере роста скорости горизонтального полета тяга подъемных силовых установок постепенно уменьшается и по окончанию переходного режима (на скоростях полета более 1,2…1,3 скорости сваливания) устанавливается минимально возможной. При этом обеспечивается возможность постоянного контроля пространственного положения ЛА по всем каналам управления на всех возможных режимах эксплуатации ЛА. Краткое описание схемы.
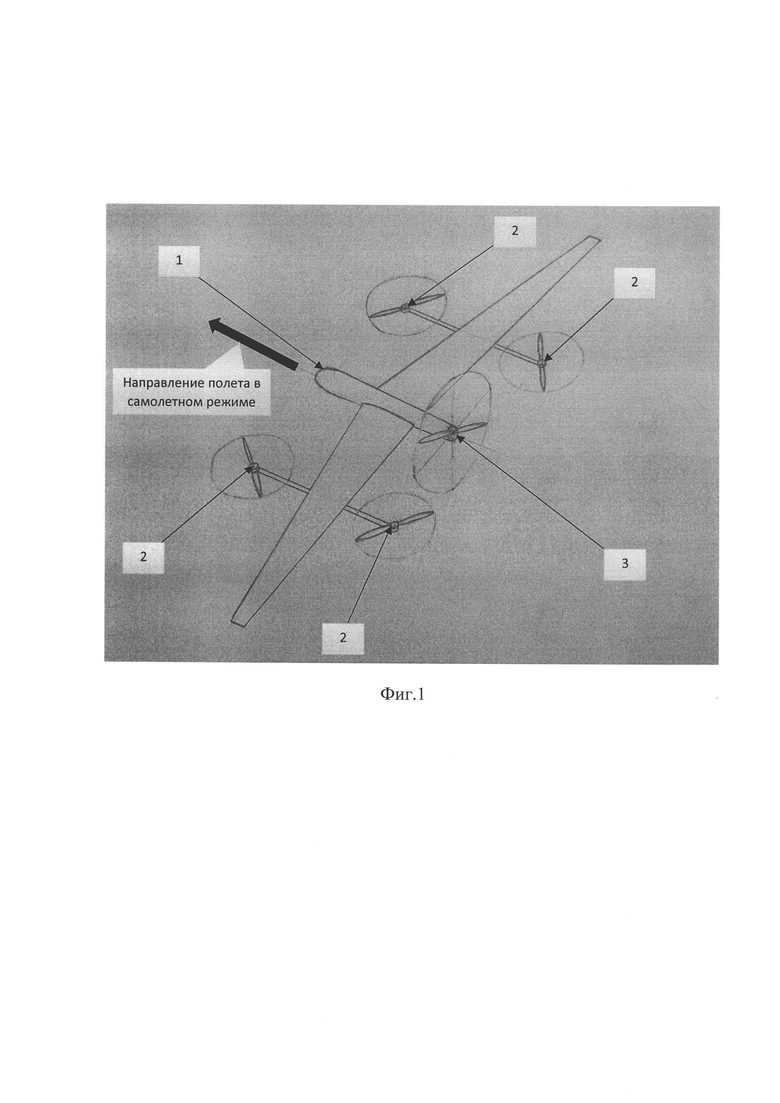
На Фиг. 1 показано устройство летательного аппарата, использующего заявленный способ управления, где:
1 - летательный аппарат с фиксированным крылом;
2 - подъемные силовые установки, используемые также в качестве органов управления по тангажу, крену и курсу на всех режимах полета;
3 - маршевая силовая установка.
Осуществление изобретения.
Изобретение реализуется на базе летательного аппарата с фиксированным крылом, например, схемы «бесхвостка» (см. Фиг. 1).
Летательный аппарат 1 имеет четыре подъемные силовые установки 2, размещенные попарно впереди и позади крыла, и используемые для создания вертикальной тяги и управляющих моментов на всех режимах полета. Также на летательном аппарате установлена маршевая силовая установка 3 для создания тяги при полете в самолетном режиме.
Указанные конструктивные особенности летательного аппарата позволяют решить задачу изобретения и добиться заявленного технического результата.
Вертикальный взлет летательного аппарата 1 осуществляется за счет тяги подъемных силовых установок 2 (см. Фиг. 1). Для стабилизации заданных значений углов пространственного положения ЛА 1 (тангажа, крена и курса) производится дифференциальное изменение режима работы подъемных силовых установок 2, что позволяет (на плечах до центра масс ЛА 1) создавать управляющие моменты относительно всех трех осей ЛА 1.
Переход в самолетный режим полета происходит при разгоне скорости в горизонтальной плоскости под действием тяги, создаваемой маршевой силовой установкой 3 (см. Фиг. 1). По мере роста скорости крыло ЛА 1 начинает создавать подъемную силу, что позволяет (для поддержания высоты горизонтального полета) уменьшать тягу подъемных силовых установок 2 пропорционально увеличению скорости полета. По окончанию переходного режима (на скоростях полета 1,2…1,3 скорости сваливания) с целью снижения расхода энергии устанавливается минимально возможный режим работы подъемных силовых установок 2. При дальнейшем полете в самолетном режиме подъемные силовые установки 2 продолжают выполнять функцию органов управления полетом.
Переход из самолетного режима полета к режиму висения осуществляется в обратном порядке: по мере уменьшения скорости полета (1,2…1,3 скорости сваливания и менее) происходит уменьшение подъемной силы, создаваемой крылом ЛА 1. При этом для поддержания высоты горизонтального полета (компенсации веса ЛА 1) производится пропорциональное увеличение тяги всех подъемных силовых установок 2.
При полете в самолетном режиме создание управляющих моментов (относительно всех трех осей ЛА 1), необходимых для обеспечения заданных характеристик устойчивости и управляемости, осуществляется с помощью дифференциального изменения режимов работы подъемных силовых установок 2 (см. Фиг. 1).
Предлагаемый способ управления позволяет реализовать не только вертикальный взлет с последующим переходом в горизонтальный полет, но и полет в самолетном режиме, используя дифференциальное управление тягой подъемных силовых установок для обеспечения необходимых характеристик устойчивости и управляемости на всех возможных режимах эксплуатации ЛА.
Источники информации
1. Патент на изобретение «Летательный аппарат вертикального взлета и посадки и способ управления его полетом» №2638221 от 12.12.2017.
2. Патент на изобретение «Летательный аппарат вертикального взлета и посадки и способ управления его полетом» №2746770 от 20.04.2021.
| название | год | авторы | номер документа |
|---|---|---|---|
| Летательный аппарат вертикального взлета и посадки и способ управления его полетом | 2020 |
|
RU2746770C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ ВЕРТИКАЛЬНОГО ВЗЛЕТА И ПОСАДКИ И СПОСОБ УПРАВЛЕНИЯ ЕГО ПОЛЕТОМ | 2016 |
|
RU2638221C2 |
| СПОСОБ УПРАВЛЕНИЯ КОНВЕРТОПЛАНОМ ВЕРТИКАЛЬНОГО ВЗЛЕТА И ПОСАДКИ | 2022 |
|
RU2795885C1 |
| Конвертоплан | 2017 |
|
RU2657706C1 |
| Конвертируемый летательный аппарат | 2019 |
|
RU2723104C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ ВЕРТИКАЛЬНОГО ВЗЛЕТА И ПОСАДКИ | 2008 |
|
RU2435707C2 |
| Конвертоплан | 2019 |
|
RU2723516C1 |
| АЭРОКОСМИЧЕСКИЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2010 |
|
RU2436715C2 |
| Экраноплан с двигательной установкой, выполненной по схеме мультикоптера | 2023 |
|
RU2833275C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2012 |
|
RU2507122C1 |
Изобретение относится к авиационной технике, в частности к способам управления летательными аппаратами вертикального взлета и посадки. Способ управления летательным аппаратом с фиксированным крылом с возможностью выполнения вертикального взлета и посадки характеризуется тем, что на этапах взлета, посадки, висения, перехода в самолетный режим полета и при полете в самолетном режиме все управляющие моменты во всех каналах управления (тангажа, крена, курса) создаются дифференциальным изменением тяги подъемных силовых установок. Потребная для горизонтального полета тяга создается маршевой силовой установкой. По мере роста скорости горизонтального полета тяга подъемных силовых установок постепенно уменьшается и по окончанию переходного режима на скоростях полета более 1,2…1,3 скорости сваливания устанавливается минимально возможной. Достигается улучшение характеристик устойчивости и управляемости на всех режимах полета ЛА, в том числе на малых скоростях, на больших углах атаки крыла и при воздействии атмосферной турбулентности. 1 ил.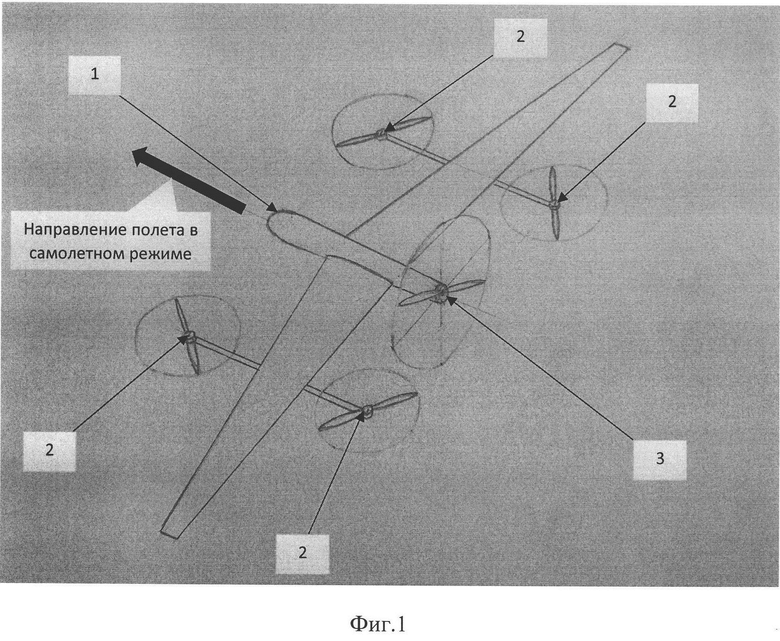
Способ управления летательным аппаратом с фиксированным крылом с возможностью выполнения вертикального взлета и посадки, характеризующийся тем, что на этапах взлета, посадки, висения, перехода в самолетный режим полета и при полете в самолетном режиме все управляющие моменты во всех каналах управления - тангажа, крена, курса, создают дифференциальным изменением тяги подъемных силовых установок, при этом потребную для горизонтального полета тягу создают маршевой силовой установкой, а по мере роста скорости горизонтального полета тягу подъемных силовых установок постепенно уменьшают и по окончании переходного режима на скоростях полета более 1,2…1,3 скорости сваливания устанавливают минимально возможной.
| US 20130020429 A1, 24.01.2013 | |||
| US 11111009 B1, 07.09.2021 | |||
| Беспилотный летательный аппарат вертикального взлета и посадки | 2017 |
|
RU2716391C2 |
| УСТАНОВКА ДЛЯ ИЗГОТОВЛЕНИЯ ДВУСЛОЙНЫХ ПУСТОТЕЛЫХ ИЗДЕЛИЙ ИЗ ТЕРМОПЛАСТОВ | 0 |
|
SU179906A1 |

