Изобретение относится к области авиационной техники, в частности, к летательным аппаратам с вертикальным взлетом и посадкой и может быть использовано для проектирования и производства беспилотной и транспортной авиации.
Конвертопланы имеют неоспоримые преимущества в транспортировании, до конца нереализованные в технических решениях в настоящее время.
Из существующего уровня техники известны разнообразные схемы конвертопланов, например Bell V-22 Osprey, Bell/Aguste ВА609, и Hiller ХС-142А (конвертоплан Bell-Boeing V22-0sprey - URL http://atikot.my1.ru/news/2009-07-03-487. Bell/Agusta BA609 - URL http://ru.wikipedia.org/wiki/Bell/Agusta BA609. Beating Gravity - Vought-Hiller-Ryan XC-142A - URL http://www.unrealaircraft.com/gravitv/vhr XC-142A.php), существуют проекты беспилотных конвертопланов, например аппарат «Гранат-5» компании «Ижмаш - беспилотные системы», аппараты КБ «ВР-технологии» https://www.vz.ru/news/2016/2/17/794787.html?keepThis=true&TB_iframe=tme&height=500&width=1100&caption=%D0%92%D0%B7%D0%B3%D0%BB%D1%8F%D0%B4).
Известны аналоги - патенты:
RU 2547155 С1, 10.04.2015;
RU 2629473 С1, 29.08.2017;
RU 2627963 С1, 14.08.2017.
Перечисленные аналоги являются двухрежимными аппаратами, они способны совершать полет как самолет, а именно, двигатели создают тягу, необходимую для движения вперед на заданной высоте с заданной скоростью. В этом режиме движения крыло обеспечивает формирование подъемной силы.
В режиме полета как вертолет, тяга двигателей, преодолевая вес, обеспечивает подъем аппарата, а движение вперед обеспечивается либо наклоном несущего винта, либо дополнительно обдуваемым оперением, при этом присущ переход от вертолетного режима к самолетному, путем поворота двигателей или крыла, с размещенными на нем двигателями.
Известны основные недостатки этих аппаратов:
- Сложность, увеличение массы и невысокая надежность механизма поворота двигателей
- Необходимость использования аппаратов перекоса ведущих к увеличению стоимости и массы конструкции
- Снижение эффективности работы винтов из-за попадания части крыла в ометаемую площадь
- Сложность стабилизации аппарата на этапе взлета и посадки
- Ограничения в горизонтальном полете возникающие вследствие большого диаметра винтов необходимого для взлетного режима.
Для устранения вышеперечисленных недостатков предлагается аэромеханический способ управления конфигурацией и режимом полета конвертируемого летательного аппарата заключающийся в формировании жесткой кинематической связи между передними и задними двигателями и использовании неуравновешенного момента от тяги двигателей для управления углом наклона двигателей, при этом в режиме вертикального взлета и посадки управление конвертопланом осуществляют на основе работы мультироторных систем, при этом стабилизация этого режима осуществляют на основе управления оборотами каждого двигателя, для перехода в режим разгона увеличивают тягу задних двигателей, в результате формируют неуравновешенный момент относительно шарнирного крепления заднего крыла, который передается через рычаги и тягу на ось вращения переднего крыла, вследствие этого вся система начинает поворот, при этом формируют горизонтальную составляющую тяги двигателей, обеспечивая разгон конвертоплана, при этом в процессе набора скорости корпус конвертоплана не наклоняется вперед и не происходит увеличение площади лобового сечения фюзеляжа, при этом крылья конвертоплана, адаптированы к работе на больших углах атаки, обеспечивают формирование подъемной силы уже на малой скорости, компенсируя потерю вертикальной составляющей тяги двигателей, в промежуточном положении двигателей, обеспечивая более устойчивый переходный процесс между режимом вертикального взлета и горизонтального полета, переход в режим горизонтального полета осуществляют путем увеличения тяги на передние двигатели, при этом формируют неуравновешенный момент от тяги двигателей стремящийся повернуть всю систему двигателей ко взлетному положению, поворотные крылья поворачивают на увеличение углов атаки, создавая большое аэродинамическое сопротивление и обеспечивают формирование аэродинамического тормоза, что обеспечивает активное торможение и сокращение времени наиболее энергоемкого процесса посадки в вертикальном режиме, для обеспечения маневренности по рысканью на этапах взлета и посадки применяют разрезную конструкцию переднего и заднего поворотного вала, а это позволяет на взлетном режиме двигателям правого и левого борта отклоняться независимо и поворот по рысканью осуществлять как за счет неуравновешенных реактивных моментов вращения винтов, так и за счет разнонаправленных горизонтальных составляющих тяги создающих момент рыскания, при этом обеспечивают формирование двухрежимной масштабируемой летающей платформы способной выполнять скоростной полет на большие расстояния, а также выполнять вертикальный или укороченный взлет и посадку и переходить в режим висения.
На фиг. 1-3 представлены основные элементы и кинематическая схема, поясняющие реализацию предлагаемого аэромеханического способа управления конфигурацией и режимом полета конвертируемого летательного аппарата.
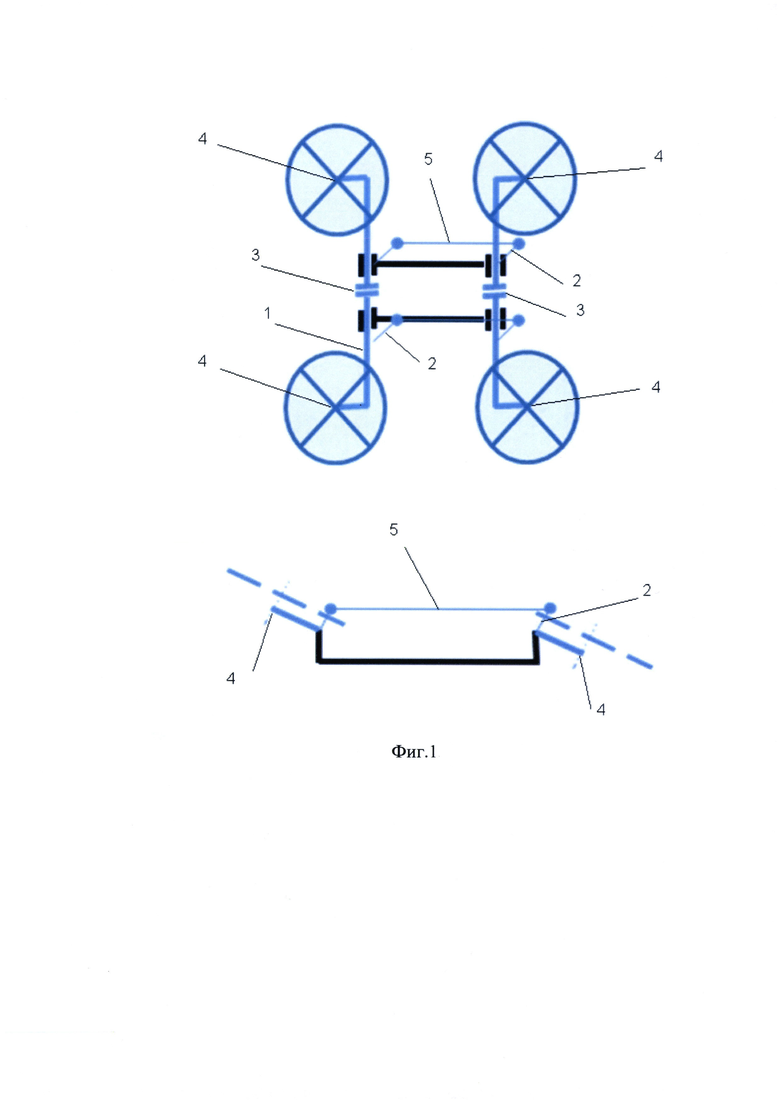
На фиг. 1 - приведена кинематическая схема примера реализации конвертоплана, на данной схеме приняты следующие обозначения:
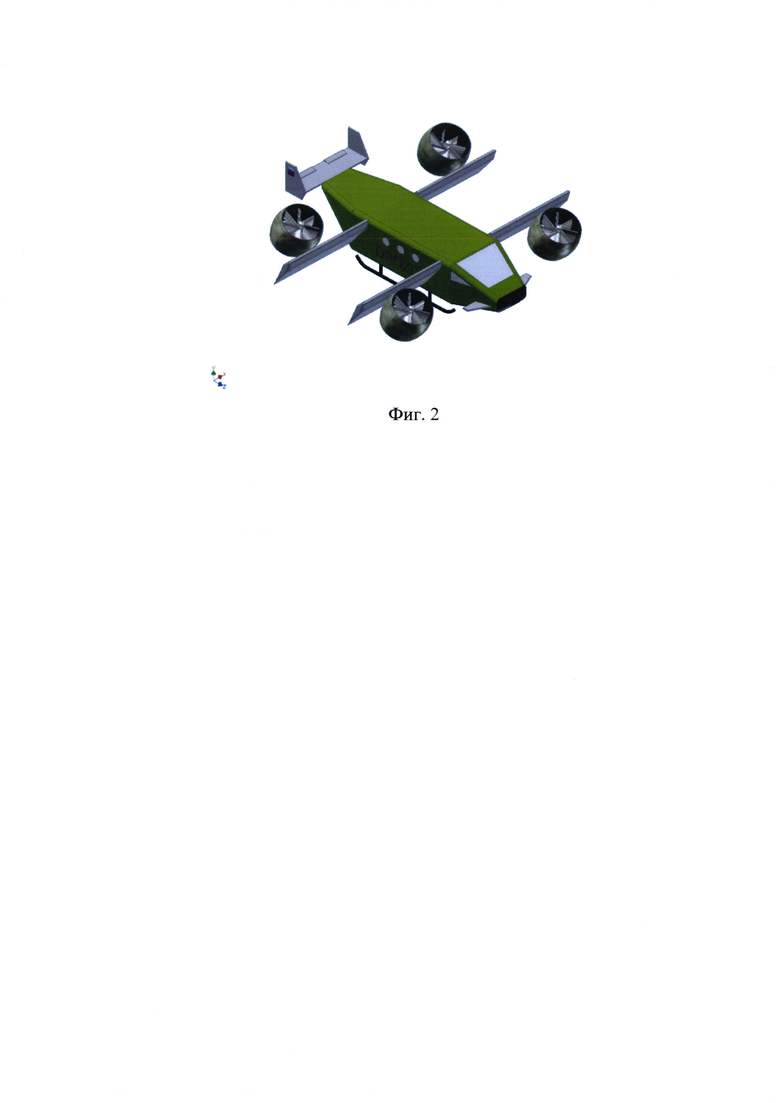
1 - шарниры (передний и задний), обеспечивающие механическое соединение двигателей (4) с фюзеляжем, при этом крылья закреплены к шарнирам (см. фиг. 2 - макет разработанного конвертоплана),
2 - качалки обеспечивают подвижную связь с передним и задним шарнирами
3 - муфты, обеспечивающие передачу вращающих моментов, формируемых с помощью двигателей (4), 5 - тяги.
На фиг. 2 - приведен вид конвертоплана в позиции, когда он находится в режиме смены режима полета (с горизонтального на вертикальное и обратно).
На фиг. 3 - вид основных режимов полета конвертоплана, где а) и в) - режимы горизонтального и вертикального полета, соответственно, б) - соответствует смене режима полета.
Конвертоплан имеет фюзеляж, два крыла, четыре двигателя, оперение, шасси.
- Крылья имеют шарнирное крепление к фюзеляжу и могут вращения вокруг осей перпендикулярных строительной оси фюзеляжа и направлению полета.
- Двигатели имеют вынос на пилонах относительно оси поворота крыльев передние вперед (вниз), задние соответственно назад(вверх).
- Валы вращения передней и задней пары двигателей кинематически жестко связаны посредством тяги и качалок и имеют возможность поворачиваться только синхронно.
Сущность предлагаемого аэромеханического способа управления конфигурацией и режимом полета заключается в использовании жесткой кинематической связи передних и задних двигателей и использовании неуравновешенного момента от тяги двигателей для управления углом наклона двигателей.
При этом в режиме вертикального взлета и посадки управление конвертопланом осуществляется на основе работы мультироторных систем, при этом стабилизация этого режима осуществляется на основе управления оборотами каждого двигателя.
Для перехода в режим разгона увеличивают тягу задних двигателей, в результате формируется неуравновешенный момент относительно шарнирного крепления заднего крыла, который передается через рычаги и тягу на ось вращения переднего крыла. Вследствие этого вся система начинает поворот, при этом возникающая горизонтальная составляющая тяги двигателей обеспечивает разгон конвертоплана. В процессе набора скорости корпус конвертоплана не наклоняется вперед как мультироторных систем, не происходит увеличения площади лобового сечения фюзеляжа и соответственно увеличения силы аэродинамического сопротивления. При этом крылья, адаптированы к работе на больших углах атаки, начинают создавать подъемную силу уже на малой скорости, компенсируя потерю вертикальной составляющей тяги двигателей, в промежуточном положении двигателей, обеспечивая более устойчивый переходный процесс между режимом вертикального взлета и горизонтального полета.
Переход в режим горизонтального полета осуществляется путем увеличения тяги на передние двигатели. При этом формируется неуравновешенный момент от тяги двигателей стремящийся повернуть всю систему двигателей ко взлетному положению. Поворотные крылья поворачивают на увеличение углов атаки, создавая большое аэродинамическое сопротивление и выполняют функцию аэродинамического тормоза, что обеспечивает активное торможение и сокращение времени наиболее энергоемкого процесса посадки в вертикальном режиме.
Для обеспечения маневренности по рысканью на этапах взлета и посадки применяется разрезная конструкция переднего и заднего поворотного вала. Это позволяет на взлетном режиме двигателям правого и левого борта отклоняться независимо и поворот по рысканью осуществляется как за счет неуравновешенных реактивных моментов вращения винтов, так и за счет разнонаправленных горизонтальных составляющих тяги создающих момент рыскания. При этом не требуется вносить изменений в работу системы автоматического управления мультироторными аппаратами.
Таким образом, предлагаемый аэромеханический способ управления конфигурацией и изменением режима полета многодвигательным конвертопланом дает возможность создать двухрежимную масштабируемую летающую платформу способную выполнять скоростной полет на большие расстояния, а также выполнять вертикальный или укороченный взлет и посадку и переходить в режим висения.
Применение предлагаемого аэромеханического способа управления конфигурацией и изменением режима полета в ограниченном режиме для существующих мультироторных беспилотных летательных аппаратов обеспечивает без использования дополнительных аэродинамических поверхностей при отклонении двигателей на углы до 45 градусов увеличение скорости и дальности полета приблизительно на 70%. При этом использование аэродинамических поверхностей и перехода в режим горизонтального полета позволит увеличить скорость в 3-4 раза, продолжительность полета в 5-6 раз.
Использование аэромеханического способа управления конфигурацией и изменением режима полета возможно масштабировать для создания летательных аппаратов взлетной массой до 500 кг, используя существующие электрические двигатели и элементную базу систем управления полетом.
Дальнейший рост массы и грузоподъемности возможен при применении винтов изменяемого шага с коротким временем реакции для обеспечения стабилизации в режиме вертикального взлета, посадки и висения.
Предлагаемый аэромеханический способ управления конфигурацией и изменением режима полета позволит создавать летательные аппараты: - обладающие высокой надежностью вследствие простой механической конструкции изменения конфигурации; - высокими летно-техническими и экономическими показателями, что позволит заменить более дорогую авиационную технику для решения транспортных задач; - более низкой стоимостью производства и эксплуатации вследствие отсутствия автоматов перекоса и исполнительных механизмов для изменения конфигурации; - более высокой живучестью обусловленных возможностью продолжать полет и выполнить посадку по «самолетному» при отказе двигателей; - простотой управления на взлете и посадке, возможностями по изменению центровки; - большей устойчивостью к боковым порывам в режиме висения, так как аэродинамические поверхности в таком положении создают меньшие опрокидывающие моменты по крену.
| название | год | авторы | номер документа |
|---|---|---|---|
| Конвертоплан | 2017 |
|
RU2657706C1 |
| Конвертоплан | 2019 |
|
RU2723516C1 |
| КОНВЕРТОПЛАН (ВАРИАНТЫ) | 2010 |
|
RU2446078C2 |
| Конвертоплан | 2024 |
|
RU2835584C1 |
| СПОСОБ УПРАВЛЕНИЯ КОНВЕРТОПЛАНОМ ВЕРТИКАЛЬНОГО ВЗЛЕТА И ПОСАДКИ | 2022 |
|
RU2795885C1 |
| Беспилотный летательный аппарат вертикального взлета и посадки | 2017 |
|
RU2716391C2 |
| МУЛЬТИРОТОРНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ ВЕРТИКАЛЬНОГО ВЗЛЕТА И ПОСАДКИ | 2024 |
|
RU2826663C1 |
| Летательный аппарат вертикального взлета и посадки и аэромеханический способ управления поворотом его подъемно-маршевых силовых установок | 2020 |
|
RU2753312C1 |
| БЕСПИЛОТНЫЙ ДВУХФЮЗЕЛЯЖНЫЙ ВЕРТОЛЕТ-САМОЛЕТ | 2012 |
|
RU2502641C1 |
| КОНВЕРТОПЛАН | 2011 |
|
RU2456208C1 |

Изобретение относится к области авиации, в частности к летательным аппаратам с вертикальным взлетом и посадкой. Аэромеханический способ управления конфигурацией и полетом конвертоплана заключается в формировании передними и задними двигателями неуравновешенного момента от тяги двигателей для управления углом наклона двигателей. В режиме вертикального взлета и посадки управление конвертопланом осуществляют изменением оборотов каждого двигателя. Для перехода в режим разгона увеличивают тягу задних двигателей, в результате формируют неуравновешенный момент относительно шарнирного крепления заднего крыла, который передается через рычаги и тягу на ось вращения переднего крыла, вся система начинает поворот, формируя горизонтальную составляющую тяги двигателей, обеспечивая разгон конвертоплана. Переход в режим горизонтального полета осуществляют путем увеличения тяги на передние двигатели, при этом формируют неуравновешенный момент от тяги двигателей, стремящийся повернуть всю систему двигателей ко взлетному положению, поворотные крылья поворачивают на увеличение углов атаки, создавая большое аэродинамическое сопротивление и обеспечивают формирование аэродинамического тормоза. Обеспечивается повышение надежности, увеличение дальности и скорости полета. 3 ил.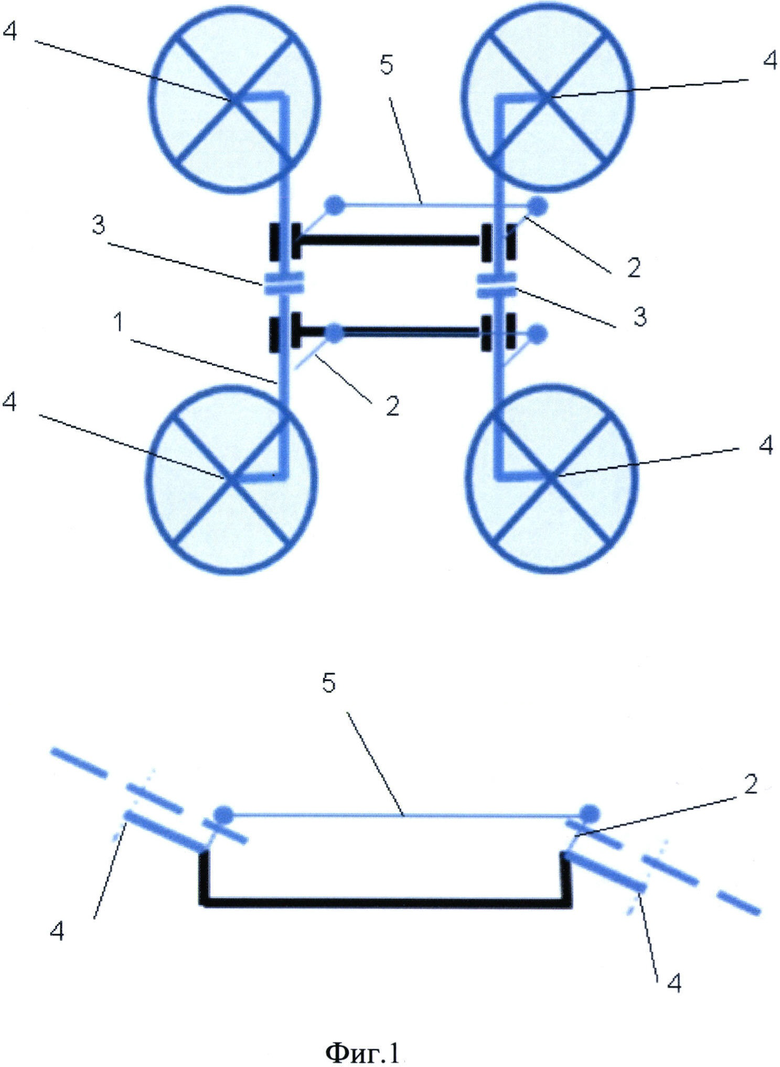
Аэромеханический способ управления конфигурацией и режимом полета конвертоплана, содержащего не менее чем четыре винтомоторные группы с электрическим приводом, расположенные симметрично на поворотных крыльях, при этом передние винтомоторные группы имеют вынос относительно оси поворота соответствующего крыла вперед и вниз, задние соответственно назад и вверх, валы вращения передней и задней пары двигателей кинематически жестко связаны посредством тяги и качалок и имеют возможность поворачиваться только синхронно, заключающийся в использовании неуравновешенного момента от тяги винтомоторных групп для управления углом их наклона, при этом в режиме вертикального взлета и посадки управление конвертопланом осуществляется управлением оборотами каждого двигателя, для перехода в режим горизонтального полета увеличивают тягу задних винтомоторных групп и за счет возникающего неуравновешенного момента происходит изменение конфигурации конвертоплана и одновременно разгон аппарата, для перехода в режим висения из горизонтального полета увеличивают тягу передних винтомоторных групп и за счет возникающего неуравновешенного момента происходит изменение конфигурации конвертоплана и одновременно торможение аппарата, для управления по рысканью в режиме висения и управления по крену в режиме горизонтального полета изменяют тягу винтомоторных групп правого и левого борта и за счет возникающего неуравновешенного момента происходит асинхронное отклонение двигателей правого и левого борта, что ведет к созданию управляющих моментов в соответствующих каналах.
| RU 152807 U1, 20.06.2015 | |||
| МНОГОДВИГАТЕЛЬНЫЙ ЭЛЕКТРОСАМОЛЕТ КОРОТКОГО ВЗЛЕТА И ПОСАДКИ | 2014 |
|
RU2554043C1 |
| WO 2017200609 A1, 23.11.2017 | |||
| Запорное устройство к бункеру для загрузки большегрузных мусоровозов | 1984 |
|
SU1211172A1 |
| МНОГОЦЕЛЕВОЙ МНОГОВИНТОВОЙ ВЕРТОЛЕТ-САМОЛЕТ | 2010 |
|
RU2448869C1 |

