Изобретение относится к области машиностроения, в частности, к системам управления огнем объектов бронетанковой техники.
Известна система управления огнем, предложенная в патенте РФ №2187060, МПК F41G 5/14, опубликованном 10.08.2000 г. Система управления огнем боевой машины содержит установленный в башне первый прицел с двухстепенной стабилизацией поля зрения, включающий первый датчик угла, кинематически связанный с горизонтальным зеркалом, второй датчик угла, ротор которого связан с вертикальным зеркалом, а статор через первый механизм передачи кинематически связан с осью качания орудия, закрепленного в цапфенных узлах башни, датчик положения, связанный с осью качания орудия вторым механизмом передачи, кинематически связанный с осью качания орудия привод вертикального наведения, вход которого соединен с выходом второго датчика угла, закрепленный в корпусе машины и кинематически связанный с башней привод горизонтального наведения, вход которого соединен с выходом первого датчика угла, установленный в башне второй прицел, включающий платформу с вертикальной осью, размещенную в подшипниках во втором прицеле, зеркальный отражатель с горизонтальной осью, размещенной в подшипниках платформы, двухосный гироскопический стабилизатор, выходная ось которого размещена в подшипниках платформы и кинематически связана передачей 2:1 с горизонтальной осью зеркального отражателя, кинематически связанный с вертикальной осью платформы регулятором, вход которого соединен с выходом двухосного гироскопического стабилизатора, третий и четвертый датчики угла, кинематически связанные соответственно с горизонтальной осью зеркального отражателя и вертикальной осью платформы. Система позволяет объединить дневной и ночной прицелы с независимой стабилизацией поля зрения в двух плоскостях и обеспечить совмещение и синхронное управление линиями визирования прицелов.
Наиболее близкой по техническим характеристикам является система управления огнем, предложенная в патенте РФ №2548346, МПК F41G 5/14, опубликованном 20.05.2015 г. Система управления огнем боевой машины содержит установленный в башне боевой машины первый прицел с двухстепенной стабилизацией поля зрения, включающий первый датчик угла, кинематически связанный с горизонтальным зеркалом, а также второй датчик угла, ротор которого связан с вертикальным зеркалом, а статор через первый механизм передачи кинематически связан с осью качания орудия, закрепленного в цапфенных узлах башни, датчик положения, связанный с осью качания орудия вторым механизмом передачи, кинематически связанный с осью качания орудия привод вертикального наведения, вход которого соединен с выходом второго датчика угла; закрепленный в корпусе машины и кинематически связанный с башней привод гризонтального наведения, вход которого соединен с выходом первого датчика угла; установленный в башне второй прицел, включающий платформу с вертикальной осью, размещенную в подшипниках во втором прицеле, зеркальный отражатель с горизонтальной осью, размещенной в подшипниках платформы, двухосный гироскопический стабилизатор, выходная ось которого, размещена в подшипниках платформы и кинематически связана передачей 2:1 с горизонтальной осью зеркального отражателя, кинематически связанный с вертикальной осью платформы регулятором, вход которого соединен с выходом двухосного гироскопического стабилизатора, третий и четвертый датчики угла, кинематически связанные соответственно с горизонтальной осью зеркального отражателя и вертикальной осью платформы, двухканальный цифроаналоговый преобразователь, первый и второй выходы которого соединены соответственно с первым и вторым входами двухосного гироскопического стабилизатора; контроллер, выход которого соединен с входом двухканального цифроаналогового преобразователя; многоканальный аналого-цифровой преобразователь, первый, второй, третий, четвертый, пятый, шестой и седьмой входы которого соединены соответственно с первым выходом третьего датчика угла, первым выходом четвертого датчика угла, выходом первого датчика угла, выходом второго датчика угла, выходом датчика положения, вторым выходом третьего датчика угла, вторым выходом четвертого датчика угла, а выход соединен с контроллером, в котором реализован алгоритм, обеспечивающий температурную компенсацию смещения нулевых точек датчиков угла, а также компенсацию кинематических погрешностей. Линия визирования второго прицела в этой системе следит за линией визирования первого прицела, для чего сравниваются между собой:
- для управления по вертикали - углы рассогласования относительно пушки линии визирования первого прицела и линии визирования второго прицела;
- для управления по горизонту - углы рассогласования относительно башни танка линии визирования первого прицела и линии визирования второго прицела.
Сигналы углов рассогласования линии визирования первого прицела относительно пушки и башни снимаются с датчиков угла первого прицела. При работе с первым (дневным) прицелом оператор, видя в поле зрения прицела смещение прицельной марки относительно цели, отклоняет пульт управления прицела таким образом, чтобы благодаря угловому перемещению стабилизатора поля зрения прицельная марка дневного прицела совмещалась с целью. При работе со вторым (тепловизионным) прицелом оператор выполняет те же операции для совмещения с целью марки тепловизионного прицела, в аппаратуре же процесс совмещения выполняется следующим образом: под действием сигналов с пульта управления стабилизатор поля зрения дневного прицела перемещает линию визирования дневного прицела, изменяются сигналы с датчиков угла прицела и в соответствии с этими сигналами следящая система тепловизионного прицела перемещает его линию визирования.
Таким образом, по сравнению с наведением при работе с дневным прицелом в этом случае добавляется использование следящей системы тепловизионного прицела, что приводит к дополнительному запаздыванию и ухудшению динамических свойств системы, то есть к колебаниям при переходном процессе, а в результате - к снижению точности и увеличению времени наведения.
Задачей изобретения является повышение точности слежения за целью и уменьшение времени наведения при работе с тепловизионным прицелом.
Технический результат - повышение точностных характеристик системы при работе с тепловизионным прицелом.
Это достигается тем, что в системе управления огнем боевой машины, содержащей установленный в башне боевой машины первый прицел с двухстепенной стабилизацией поля зрения, включающий первый датчик угла, кинематически связанный с горизонтальным зеркалом, а также второй датчик угла, ротор которого связан с вертикальным зеркалом, а статор через первый механизм передачи кинематически связан с осью качания орудия, закрепленного в цапфенных узлах башни, датчик положения, связанный с осью качания орудия вторым механизмом передачи, кинематически связанный с осью качания орудия привод вертикального наведения, вход которого соединен с выходом второго датчика угла, закрепленный в корпусе машины и кинематически связанный с башней привод горизонтального наведения, вход которого соединен с выходом первого датчика угла, установленный в башне второй прицел, включающий двухосный гироскопический стабилизатор с вертикальной осью, размещенной в подшипниках второго прицела, зеркальный отражатель с горизонтальной осью, размещенной в подшипниках двухосного гироскопического стабилизатора и кинематически связанной передачей 2:1 с горизонтальной осью двухосного гироскопического стабилизатора, третий и четвертый датчики угла, кинематически связанные соответственно с горизонтальной осью и вертикальной осью двухосного гироскопического стабилизатора, двухканальный цифроаналоговой преобразователь, первый и второй выходы которого соединены соответственно с первым и вторым входами двухосного гироскопического стабилизатора, контроллер, выход которого соединен с входом двухканального цифроаналогового преобразователя, многоканальный аналого-цифровой преобразователь, первый, второй, третий, четвертый, пятый, шестой и седьмой входы которого соединены соответственно с первым выходом третьего датчика угла, первым выходом четвертого датчика угла, выходом первого датчика угла, выходом второго датчика угла, выходом датчика положения, вторым выходом третьего датчика угла и вторым выходом четвертого датчика угла, а выход соединен с контроллером, в котором реализован алгоритм, обеспечивающий температурную компенсацию смещения нулевых точек датчиков угла, а также компенсацию кинематических погрешностей совмещения линий визирования двух прицелов и фильтрацию сигналов, первый прицел выполнен с первым и вторым двигателями наведения и пультом управления, выходы которого соединены с входами соответствующих усилителей мощности, выход первого усилителя мощности соединен с входом первого двигателя наведения и с восьмым входом многоканального аналого-цифрового преобразователя, а выход второго усилителя мощности соединен с входом второго двигателя наведения и с девятым входом многоканального аналого-цифрового преобразователя, а двухосный гироскопический стабилизатор размещен в подшипниках второго прицела, а в контроллере дополнительно реализован алгоритм учета сигналов угловых скоростей наведения линии визирования первого прицела. Изобретение поясняется фигурой.
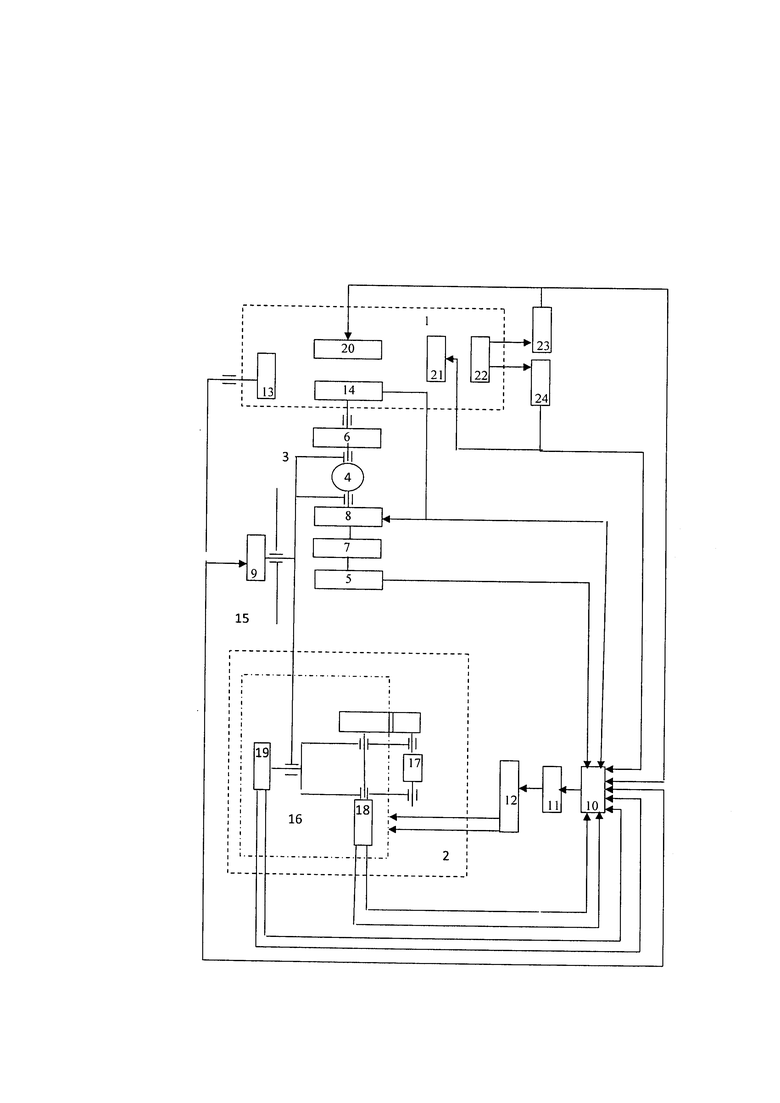
Система управления огнем (фиг.) содержит первый прицел 1 и второй прицел 2, установленные на башне 3, связанный с орудием 4 датчик положения 5, первый механизм передачи 6 и второй механизм передачи 7, привод вертикального наведения 8, привод горизонтального наведения 9, многоканальный аналого-цифровой преобразователь 10, контроллер 11 и двухканальный цифроаналоговый преобразователь 12. Первый прицел 1 имеет первый датчик угла 13, кинематически связанный с горизонтальным зеркалом (на фигуре не показано), и второй датчик угла 14, ротор которого кинематически связан с вертикальным зеркалом (на фигуре не показано), а статор через первый механизм передачи 6 кинематически связан с осью качания орудия 4, закрепленного в цапфенных узлах башни 3. На башне 3 установлен датчик положения 5, кинематически связанный вторым механизмом передачи 7 с осью качания орудия 4. С осью качания орудия 4 кинематически связан также привод вертикального наведения 8, вход которого соединен с выходом второго датчика угла 14. В корпусе 15 машины закреплен и кинематически связан с башней 3 привод горизонтального наведения 9, вход которого соединен с выходом первого датчика угла 13. Второй прицел 2 включает двухосный гироскопический стабилизатор 16 с вертикальной осью, размещенной в подшипниках прицела 2, зеркальный отражатель 17 с горизонтальной осью, размещенной в подшипниках двухосного гироскопического стабилизатора 16 и кинематически связанной передачей 2:1 с горизонтальной осью двухосного гироскопическкого стабилизатора 16, третий 18 и четвертый 19 датчики угла, кинематически связанные соответственно с горизонтальной осью и вертикальной осью двухосного гироскопического стабилизатора 16. Первый, второй, третий, четвертый, пятый шестой и седьмой входы многоканального аналого-цифрового преобразователя 10 соединены соответственно с первым выходом третьего датчика угла 18, первым выходом четвертого датчика угла 19, выходом первого датчика угла 13, выходом второго датчика угла 14, выходом датчика положения 5, вторым выходом третьего датчика угла 18 и вторым выходом четвертого датчика угла 19, а выход которого соединен с входом контроллера 11. Вход двухканального цифроаналогового преобразователя 12 соединен с выходом контроллера 11, а первый и второй выходы соединены с первым и вторым входами двухосного гироскопического стабилизатора 16 соответственно. Первый прицел 1 предназначен для стабилизации поля зрения в плоскостях вертикального и горизонтального наведения и управления линией визирования в двух плоскостях. Первый датчик угла 13 выдает сигнал, пропорциональный углу поворота линии визирования относительно башни 3 в плоскости горизонтального наведения, второй датчик угла 14 выдает сигнал, пропорциональный углу поворота линии визирования относительно орудия в плоскости вертикального наведения. Первый и второй выходы пульта управления 22 соединены соответственно с входами первого 23 и второго 24 усилителей мощности. Выход первого усилителя мощности соединен с входом первого двигателя наведения 20 и с восьмым входом многоканального аналого-цифрового преобразователя 10, а выход второго усилителя мощности соединен с входом второго двигателя наведения 21 и с девятым входом многоканального аналого-цифрового преобразователя 10. В качестве первого прицела используется прицел 1Г46. Второй прицел 2 предназначен для стабилизации поля зрения в плоскостях вертикального и горизонтального наведения и обеспечивает синхронное слежение линии визирования за линией визирования первого прицела 1.
Работает система управления огнем следующим образом. Сигналы с третьего датчика угла 18, четвертого датчика угла 19 и датчика положения 5 преобразуются с помощью многоканального аналого-цифрового преобразователя 10 в цифровой код и используются в контроллере 11 для определения текущего положения линии визирования второго прицела 2 относительно башни 3 по горизонту и относительно орудия 4 по вертикали с учетом температурных поправок на смещение нулевых точек датчиков угла и поправок, компенсирующих кинематические погрешности системы и вычисляемых контроллером с учетом сигнала датчика положения 5 и запомненных в контроллере 11 коэффициентов коррекции. Температура датчиков угла контролируется в системе путем измерения напряжения с косинусной обмотки в случае применения в качестве датчика угла синусно-косинусного вращающегося трансформатора или напряжения на обмотке возбуждения при использовании линейного датчика угла с токовой запиткой. Коэффициенты коррекции смещения нуля датчиков угла от изменения температуры определяются при настройке системы. При наведении линии визирования оператор отклоняет пульт управления 22 и его рукоятки. Вырабатываемые согласно этим отклонениям сигналы наведения усиливаются усилителями мощности 23 и 24. Сигналы с выхода усилителей поступают на двигатели наведения 20 и 21, а также на входы многоканального аналого-цифрового преобразователя 10, где преобразуются в цифровой код и передаются на контроллер 11. Сигналы с первого датчика угла 13 и второго датчика угла 14 преобразуются с помощью многоканального аналого-цифрового преобразователя 10 в цифровой код и используются для определения текущего положения линии визирования прицела 1 относительно башни 3 по горизонтальному наведению и орудия 4 по вертикальному наведению. Контроллер 11 вычисляет рассогласование между положением линий визирования первого 1 и второго 2 прицелов, выполняет фильтрацию и коррекцию разностных сигналов и формирует управляющее воздействие с учетом разностных сигналов и сигналов угловых скоростей линии визирования первого прицела, а именно сигналов с выхода усилителей мощности 23 и 24, подаваемое через двухканальный цифроаналоговый преобразователь 12 на первый и второй входы двухосного гироскопическкого стабилизатора 16, который отрабатывает поступающее на него управляющее воздействие и сводит рассогласование между положениями линий визирования первого 1 и второго 2 прицелов к нулю.
Таким образом, при использовании сигналов угловых скоростей в процессе наведения линии визирования тепловизионного прицела сигналы наведения по существу подаются параллельно на дневной прицел и на тепловизионный прицела, благодаря чему снижается запаздывание при работе с тепловизионным прицелом, что позволяет повысить точность слежения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА УПРАВЛЕНИЯ ОГНЁМ | 2013 |
|
RU2548376C1 |
| СИСТЕМА УПРАВЛЕНИЯ ОГНЕМ | 2000 |
|
RU2187060C2 |
| Система управления огнем боевой машины | 2022 |
|
RU2785804C1 |
| КОМПЛЕКС УПРАВЛЕНИЯ ВООРУЖЕНИЕМ ТАНКА | 2002 |
|
RU2226664C2 |
| Система управления огнем боевой машины | 2020 |
|
RU2743893C1 |
| КОМПЛЕКС ВООРУЖЕНИЯ БОЕВОЙ МАШИНЫ | 2007 |
|
RU2351876C1 |
| КОМПЛЕКС ВООРУЖЕНИЯ БОЕВОЙ МАШИНЫ И СТАБИЛИЗАТОР ВООРУЖЕНИЯ | 2007 |
|
RU2360208C2 |
| СПОСОБ СТРЕЛЬБЫ БОЕВОЙ МАШИНЫ С ЗАКРЫТЫХ ПОЗИЦИЙ ПО НЕНАБЛЮДАЕМОЙ ЦЕЛИ И СИСТЕМА УПРАВЛЕНИЯ ОГНЕМ ДЛЯ ЕЕ ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2444693C2 |
| ПАНОРАМНЫЙ ПРИБОР НАБЛЮДЕНИЯ КОМАНДИРА | 2018 |
|
RU2682141C1 |
| УСТРОЙСТВО ДЛЯ ЗАПУСКА РАКЕТЫ С ПОДВИЖНОГО НОСИТЕЛЯ | 2011 |
|
RU2455610C1 |
Изобретение относится к области вооружения, в частности к системам управления огнем бронетанковой техники, обеспечивающим наблюдение за полем боя и управление вооружением. Технический результат заключается в повышении точности слежения. Заявленное изобретение представляет собой систему управления огнём боевой машины, содержащую двухосный гироскопический стабилизатор, датчики угла, датчик положения, дневной и тепловизионный прицелы, причем линия визирования тепловизионного прицела следит за линией визирования дневного прицела, для управления линией визирования тепловизионного прицела дополнительно к сигналам датчиков угла дневного прицела используются сигналы угловых скоростей наведения линии визирования дневного прицела; в контроллере реализован алгоритм, обеспечивающий температурную компенсацию смещения нулевых точек датчиков угла, а также компенсацию кинематических погрешностей совмещения линий визирования двух прицелов и фильтрацию сигналов, в контроллере дополнительно реализован алгоритм учета сигналов угловых скоростей наведения линии визирования первого прицела. 1 ил.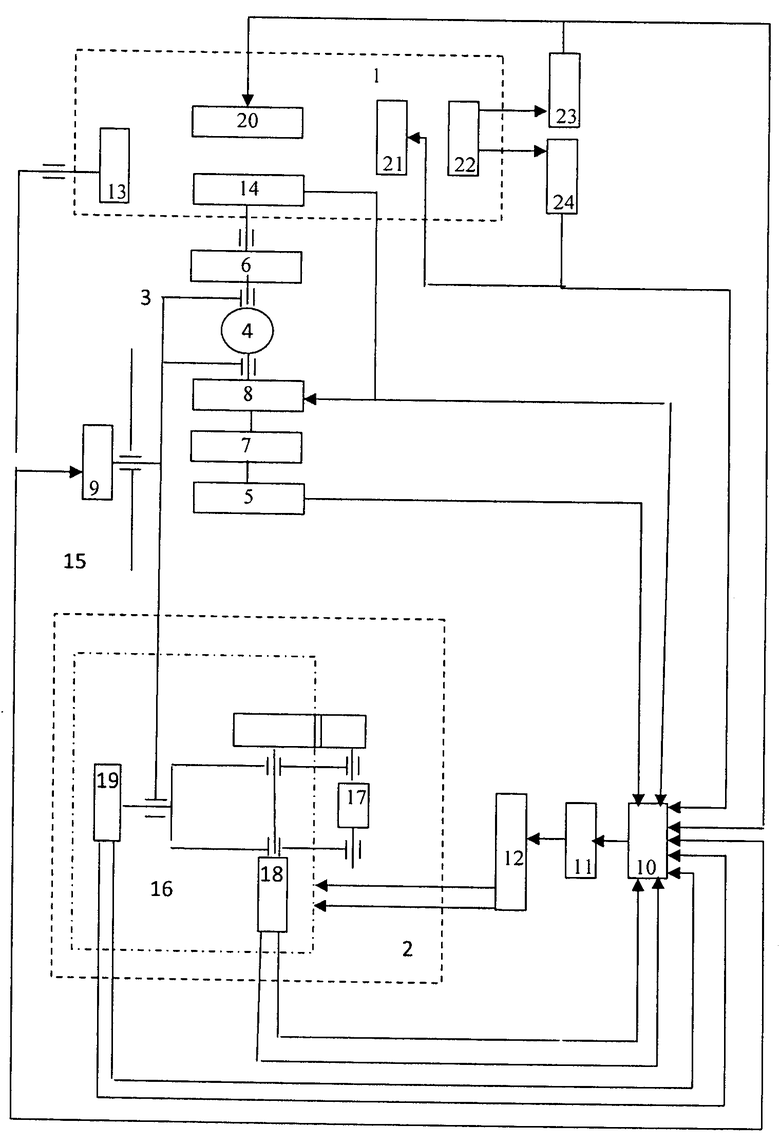
Система управления огнем боевой машины, содержащая установленный в башне боевой машины первый прицел с двухстепенной стабилизацией поля зрения, включающий первый датчик угла, кинематически связанный с горизонтальным зеркалом, а также второй датчик угла, ротор которого связан с вертикальным зеркалом, а статор через первый механизм передачи кинематически связан с осью качания орудия, закрепленного в цапфенных узлах башни, датчик положения, связанный с осью качания орудия вторым механизмом передачи, кинематически связанный с осью качания орудия привод вертикального наведения, вход которого соединен с выходом второго датчика угла, закрепленный в корпусе машины и кинематически связанный с башней привод горизонтального наведения, вход которого соединен с выходом первого датчика угла, установленный в башне второй прицел, включающий двухосный гироскопический стабилизатор с вертикальной осью, размещенной в подшипниках второго прицела, зеркальный отражатель с горизонтальной осью, размещенной в подшипниках двухосного гироскопического стабилизатора и кинематически связанной передачей 2:1 с горизонтальной осью двухосного гироскопического стабилизатора, третий и четвертый датчики угла, кинематически связанные соответственно с горизонтальной осью и вертикальной осью двухосного гироскопического стабилизатора, двухканальный цифроаналоговый преобразователь, первый и второй выходы которого соединены соответственно с первым и вторым входами двухосного гироскопического стабилизатора, контроллер, выход которого соединен с входом двухканального цифроаналогового преобразователя, многоканальный аналого-цифровой преобразователь, первый, второй, третий, четвертый, пятый, шестой и седьмой входы которого соединены соответственно с первым выходом третьего датчика угла, первым выходом четвертого датчика угла, выходом первого датчика угла, выходом второго датчика угла, выходом датчика положения, вторым выходом третьего датчика угла и вторым выходом четвертого датчика угла, а выход соединен с контроллером, в котором реализован алгоритм, обеспечивающий температурную компенсацию смещения нулевых точек датчиков угла, а также компенсацию кинематических погрешностей совмещения линий визирования двух прицелов и фильтрацию сигналов, причем первый прицел выполнен с первым и вторым двигателями наведения и пультом управления, выходы которого соединены с входами соответствующих усилителей мощности, выход первого усилителя мощности соединен с входом первого двигателя наведения и с восьмым входом многоканального аналого-цифрового преобразователя, выход второго усилителя мощности соединен с входом второго двигателя наведения и с девятым входом многоканального аналого-цифрового преобразователя, двухосный гироскопический стабилизатор с вертикальной осью размещен в подшипниках второго прицела, а в контроллере дополнительно реализован алгоритм учета сигналов угловых скоростей наведения линии визирования первого прицела.
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА УПРАВЛЕНИЯ ВООРУЖЕНИЕМ | 2003 |
|
RU2239768C1 |
| Приспособление к крутильному ватеру для получения крученой полушерстяной пряжи с сердечником из хлопчатобумажной нити | 1936 |
|
SU49990A1 |
| Импульсный индикатор для пожарной сигнализации | 1930 |
|
SU29390A1 |
| СИСТЕМА УПРАВЛЕНИЯ ОГНЁМ | 2013 |
|
RU2548376C1 |
| Способ просмоления сосновой древесины | 1938 |
|
SU57235A1 |

