Область техники
[0001] Изобретение относится к области измерительной техники с применением вычислительных технологий и может быть использовано в области промышленности, которая эксплуатирует трубопроводы (нефтегазодобывающей, строительной, энергетической, атомной, коммунальном хозяйстве, диагностике металлоконструкций, охране окружающей среды).
Уровень техники
[0002] Напряженное состояние стенок тонкостенных труб трубопроводов в основном определяется двумя главными напряжениями: кольцевыми и продольными. Кольцевые напряжения в стенке труб возникают от внутреннего давления транспортируемой среды и в отсутствие возможных неоднородностей и дефектов эти напряжения постоянны по окружности рассматриваемого сечения трубы. В случае наличия дефекта или неоднородностей будет наблюдаться неравномерный характер распределения кольцевых напряжений в области данной неоднородности, и данная анизотропия будет обусловлена локальной концентрацией напряжений. Продольные напряжения складываются из напряжений, обусловленных: 1. внутренним давлением среды (рассчитываются как доля от кольцевых); 2. возможными температурными деформациями; 3. изгибом, который может быть вызван кривизной трассы при укладке трубопровода (например, кривизной траншеи) либо возможными непроектными внешними воздействиями и/или изменением положения трубопровода (например, в результате его всплытия, перемещения вследствие оползневых процессов и др.). Поэтому практической приоритетной задачей определения напряженного состояния трубопроводов является оценка изгибных напряжений в потенциально опасных сечениях трубопровода.
[0003] В настоящее время существует множество решений, обеспечивающих детектирование механических напряжений в трубопроводах. Известна система и способ проверки подводного вертикального трубопровода, описанные в US 2016/0231278 A1. Данное решение предусматривает устройство для обнаружения, идентификации и мониторинга механических дефектов в металлических конструкциях, основанное на методе магнитографической/магнитной томографии для выявления дефектов, связанных с напряжением. Устройство может определять положение дефекта или напряжения, включая информацию о глубине. Устройство включает средства регистрации, оптимизированные для использования с металлическими конструкциями различного типа, формы и размера. Решение включает в себя контроль качества в реальном времени, мониторинг и аварийную сигнализацию, а также рекомендации и планирование работ по ремонту и техническому обслуживанию.
[0004] Однако известному решению присущи недостатки. Среди таких недостатков имеется низкая точность определения механических напряжений в трубопроводе. Данный недостаток обусловлен тем, что в известном решении имеется возможность обеспечить контроль только одного вида напряжений при соответствующей ориентации прибора. Иными словами, в известном решении нет возможности производить измерения плотности магнитного потока одновременно через четыре плоскости в пространстве с последующим определением механических напряжений в трубопроводе на основании вычисленного распределения механических напряжений в каждой измеренной точке на всем протяжении трубопровода.
Раскрытие изобретения
[0005] Задачей изобретения является устранение указанных выше недостатков и создание решения, обеспечивающего определение фактического состояния трубопровода, работающего в условиях реальных нагрузок.
[0006] Техническим результатом при этом является повышение точности определения механических напряжений с одновременной точностью обнаружения источника аномалии в трубопроводе.
[0007] Для достижения данного технического результата предложена система бесконтактного определения механических напряжений в трубопроводе, содержащая: устройство бесконтактного измерения механических напряжений в трубопроводе, содержащее, по меньшей мере, три устройства бесконтактного измерения плотности магнитного потока, и выполненное с возможностью перемещения вдоль оси трубопровода на удаленном от него расстоянии с последующей передачей вычислительному устройству данных о механических напряжениях в трубопроводе, где данные содержат информацию о форме распределения механических напряжений; при этом каждое из упомянутых устройств бесконтактного измерения плотности магнитного потока включает массив датчиков, выполненный с возможностью измерения плотности магнитного потока путем последовательного бесконтактного измерения характеристических параметров вдоль оси трубопровода, при этом в качестве характеристических параметров используют градиенты индукции магнитного поля dB, характеризующие изменение плотности магнитного потока, проходящего через массив датчиков в процессе перемещения упомянутого устройства бесконтактного измерения механических напряжений вдоль оси трубопровода на удаленном от него расстоянии, где: первое устройство бесконтактного измерения плотности магнитного потока выполнено с возможностью бесконтактного измерения плотности магнитного потока в плоскости YZ, где плоскость YZ определяет область действия поперечных кольцевых напряжений трубопровода, второе устройство бесконтактного измерения плотности магнитного потока выполнено с возможностью бесконтактного измерения плотности магнитного потока в плоскости XY, где плоскость XY определяет область действия продольно-горизонтальных напряжений трубопровода и изгибающих моментов, третье устройство бесконтактного измерения плотности магнитного потока выполнено с возможностью бесконтактного измерения плотности магнитного потока в двух плоскостях XZ, расположенных на расстоянии друг от друга, где упомянутые плоскости XZ определяют область действия продольно-вертикальных напряжений и изгибающих моментов; при этом упомянутые бесконтактные измерения происходят одновременно в плоскостях YZ, XY и двух плоскостях XZ; вычислительное устройство определения механических напряжений, содержащее память, соединенную с процессором, выполненное с возможностью приема от устройства бесконтактного измерения механических напряжений в трубопроводе и передачи управляющих данных упомянутому устройству бесконтактного измерения посредством канала приема и передачи данных; при этом процессор выполнен с возможностью: а) приема от устройства бесконтактного измерения механических напряжений в трубопроводе данных характеристических параметров в виде градиентов индукции магнитного поля dB, которые характеризуют изменение плотности магнитного потока, б) калибровки данных характеристических параметров на основании принятых от упомянутого устройства бесконтактного измерения данных, при которой по известным данным определяют калибровочные коэффициенты, характеризующие магнитомеханическое состояние однородного трубопровода на всей его протяженности как зависимость изменения плотности магнитного потока от изменения механического момента, при этом калибровочные коэффициенты определяются в виде отношений магнитных и механических моментов, причем упомянутая калибровка определяется как из условий заранее известных отличий магнитных моментов в двух различных сечениях трубопровода или известных отличий механических моментов для условий разницы во внутреннем давлении или температуры; в) вычисления распределения механических напряжений в каждой измеренной точке на всем протяжении трубопровода посредством матричных преобразований, где в результате матричных преобразований определяют приращения главного вектора напряжений в каждой измеренной точке, при этом поперечные кольцевые, продольно-горизонтальные и продольно-вертикальные напряжения вычисляют отдельно как проекции главного вектора напряжений на соответствующие плоскости, лежащие в области действия напряжений; и г) определения механических напряжений в трубопроводе на основании вычисленного распределения механических напряжений в каждой измеренной точке на всем протяжении трубопровода, где при заданных критериях предельных значений напряжений определяют аномалии, при этом по максимальной величине отклонения от допустимых значений механических напряжений судят о величине концентрации механических напряжений, а по форме распределения механических напряжений судят о характере источника аномалии; при этом память содержит базу данных механических напряжений в трубопроводе, и выполнена с возможностью приема от упомянутого процессора и сохранения характеристических параметров в виде градиентов индукции магнитного поля dB, определенных калибровочных коэффициентов и вычисленных распределений механических напряжений в каждой измеренной точке на всем протяжении трубопровода.
[0008] Дополнительно бесконтактное определение механических напряжений в трубопроводе выполняется над трубопроводом, расположенным, по меньшей мере, в одном из следующем местоположении: в гористой местности, в заболоченной местности, в местности с подвижками грунта и оползневыми эффектами, местности с повышенной сейсмоактивностью, в водной среде с возможными провисами
[0009] Дополнительно по меньшей мере, один массив датчиков выполнен по дифференциальной схеме включения.
[0010] Дополнительно плоскости YZ, XY и две плоскости XZ расположены в системе координат, пространственно связанной с трубопроводом.
[0011] Дополнительно устройство бесконтактного измерения механических напряжений в трубопроводе выполнено в виде рамы из немагнитных материалов с возможностью изменять апертуры каждого устройства бесконтактного измерения плотности магнитного потока в зависимости от диаметра трубопровода и расстояния до его оси с последующим преобразованием системы координат в цилиндрическую систему координат, связанную с осью трубопровода.
[0012] Дополнительно массив датчиков, по меньшей мере, одного устройства бесконтактного измерения плотности магнитного потока выполнен в виде массива феррозондовых датчиков, выполненных с возможностью регулировки частоты тока возбуждения, и бесконтактного измерения плотности магнитного потока резонансного характера с последующим определением вида неоднородности или особенности трубопровода (дефекта), как результата корреляции с частотой собственных колебаний такой неоднородности или особенности.
[0013] Дополнительно устройство бесконтактного измерения механических напряжений в трубопроводе содержит систему датчиков контроля, включающую датчики давления, модуль GPS или GLONASS для обеспечения возможности определения местоположения устройства по отношению к оси трубопровода в горизонтальной и вертикальной плоскостях, под водой или в воздухе.
[0014] Дополнительно каждое из устройств бесконтактного измерения плотности магнитного потока выполнено с возможностью изменения положений вдоль окружности распределения силовых линий магнитного потока, направленных от центра оси трубопровода или силовых линий магнитного потока, направленных к центру оси трубопровода для преобразования измерений в цилиндрическую систему координат.
[0015] Дополнительно устройство бесконтактного измерения механических напряжений в трубопроводе содержит множество гироскопов и акселерометров, выполненных с возможностью определения текущего состояния и точного положения упомянутого устройства в системе координат, связанной с трубопроводом, в момент измерения в условиях возможных колебаний для обеспечения возможности определения расстояния от начального участка измерения до конечного участка измерения.
[0016] Дополнительно устройство бесконтактного измерения механических напряжений в трубопроводе содержит датчик-маяк, выполненный в виде энергонезависимого источника электромагнитного излучения для обеспечения возможности обнаружения устройства бесконтактного измерения в случае его применения на носителе, управляемым оператором удаленно.
[0017] Дополнительно устройство бесконтактного измерения механических напряжений в трубопроводе и вычислительное устройство определения механических напряжений разнесены друг от друга в пространстве и соединены между собой проводными и/или беспроводными линиями связи.
[0018] Также для достижения технического результата предложен способ бесконтактного определения механических напряжений в трубопроводе, включающий этапы, на которых: бесконтактно измеряют плотность магнитного потока посредством массивов датчиков путем последовательного бесконтактного измерения характеристических параметров вдоль оси трубопровода, при этом в качестве характеристических параметров используют градиенты индукции магнитного поля dB, характеризующие изменение плотности магнитного потока, проходящего через массив датчиков в процессе их перемещения вдоль оси трубопровода на удаленном от него расстоянии, где измерение плотности магнитного потока включает: i) бесконтактное измерение плотности магнитного потока в плоскости YZ, где плоскость YZ определяет область действия поперечных кольцевых напряжений трубопровода, ii) бесконтактное измерение плотности магнитного потока в плоскости XY, где плоскость XY определяет область действия продольно-горизонтальных напряжений трубопровода и изгибающих моментов, iii) бесконтактное измерение плотности магнитного потока в двух плоскостях XZ, расположенных на расстоянии друг от друга, где упомянутые плоскости XZ определяют область действия продольно-вертикальных напряжений и изгибающих моментов; при этом упомянутые бесконтактные измерения происходят одновременно в плоскостях YZ, XY и двух плоскостях XZ; принимают вычислительным устройством определения механических напряжений данные характеристических параметров в виде градиентов индукции магнитного поля dB, которые характеризуют изменение плотности магнитного потока, выполняют упомянутым вычислительным устройством калибровку данных характеристических параметров на основании принятых данных, при которой по известным данным определяют калибровочные коэффициенты, характеризующие магнитомеханическое состояние однородного трубопровода на всей его протяженности как зависимость изменения плотности магнитного потока от изменения механического момента, при этом калибровочные коэффициенты определяются в виде отношений магнитных и механических моментов, причем упомянутая калибровка определяется как из условий заранее известных отличий магнитных моментов в двух различных сечениях трубопровода или известных отличий механических моментов для условий разницы во внутреннем давлении или температуры; упомянутым вычислительным устройством вычисляют распределения механических напряжений в каждой измеренной точке на всем протяжении трубопровода посредством матричных преобразований, где в результате матричных преобразований определяют приращения главного вектора напряжений в каждой измеренной точке, при этом поперечные кольцевые, продольно-горизонтальные и продольно-вертикальные напряжения вычисляют отдельно как проекции главного вектора напряжений на соответствующие плоскости, лежащие в области действия напряжений; и упомянутым вычислительным устройством определяют механические напряжения в трубопроводе на основании вычисленного распределения механических напряжений в каждой измеренной точке на всем протяжении трубопровода, где при заданных критериях предельных значений напряжений определяют аномалии, при этом по максимальной величине отклонения от допустимых значений механических напряжений судят о величине концентрации механических напряжений, а по форме распределения механических напряжений судят о характере источника аномалии; сохраняют в базу данных механических напряжений характеристические параметры в виде градиентов индукции магнитного поля dB, определенные калибровочные коэффициенты и вычисленные распределения механических напряжений в каждой измеренной точке на всем протяжении трубопровода.
[0019] Дополнительно бесконтактное определение механических напряжений в трубопроводе выполняется над трубопроводом, расположенным, по меньшей мере, в одном из следующем местоположении: в гористой местности, в заболоченной местности, в местности с подвижками грунта и оползневыми эффектами, местности с повышенной сейсмоактивностью, в водной среде с возможными провисами.
[0020] Дополнительно плоскости YZ, XY и две плоскости XZ расположены в системе координат, пространственно связанной с трубопроводом.
[0021] Дополнительно способ включает этап определения местоположения массива датчиков по отношению к оси трубопровода в горизонтальной и вертикальной плоскостях, под водой или в воздухе посредством датчиков давления и/или модуля GPS/GLONASS.
[0022] Дополнительно способ включает этап изменения положений массивов датчиков вдоль окружности распределения силовых линий магнитного потока, направленных от центра оси трубопровода или силовых линий магнитного потока, направленных к центру оси трубопровода для преобразования измерений в цилиндрическую систему координат.
[0023] Дополнительно способ включает этап определения посредством множества гироскопов и акселерометров текущего состояния и точного положения массивов датчиков в системе координат, связанной с трубопроводом, в момент измерения в условиях возможных колебаний для обеспечения возможности определения расстояния от начального участка измерения до конечного участка измерения.
[0024] Очевидно, что как предыдущее общее описание, так и последующее подробное описание даны лишь для примера и пояснения и не являются ограничениями данного изобретения.
Краткое описание чертежей
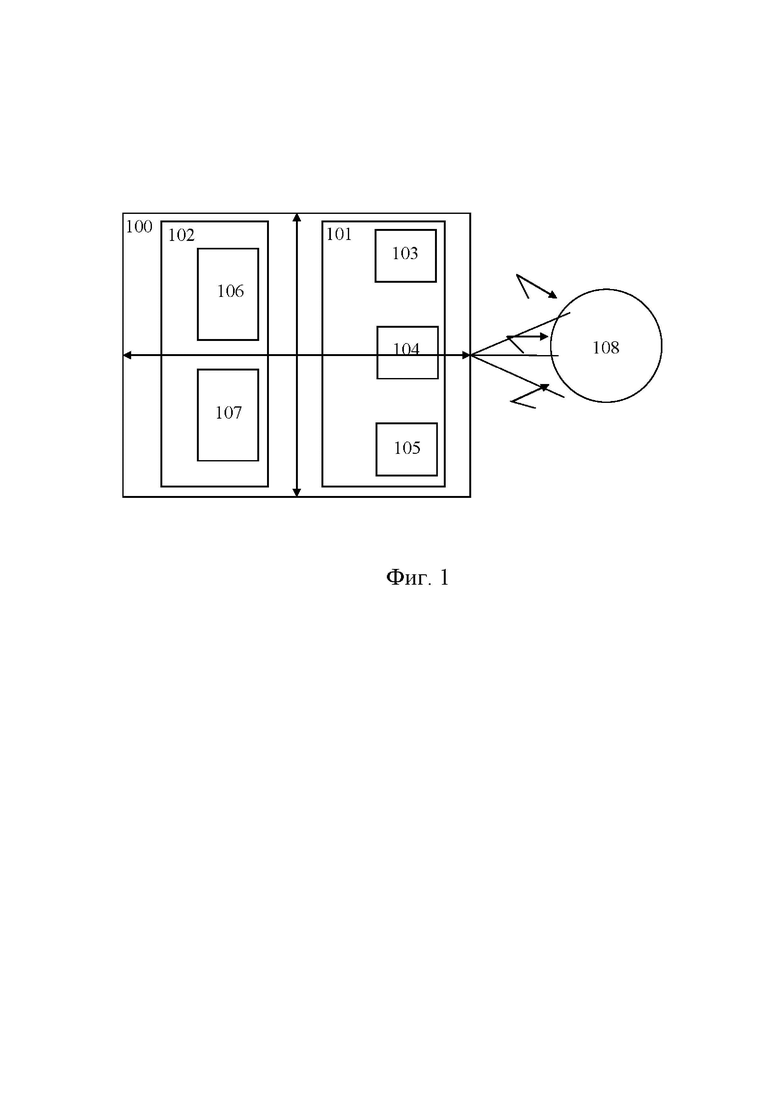
[0025] Фиг. 1 – блок-схема системы бесконтактного определения механических напряжений в трубопроводе.
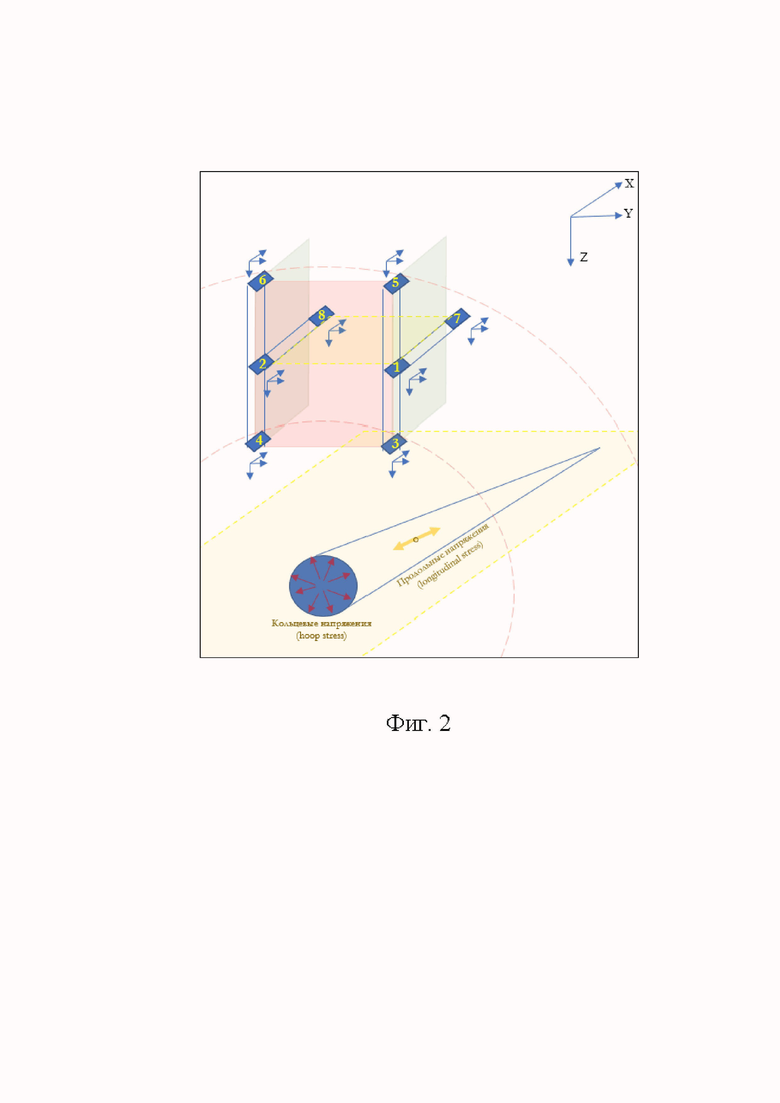
[0026] Фиг. 2 – схематичное изображение расположения плоскостей YZ, XY и двух плоскостей XZ.
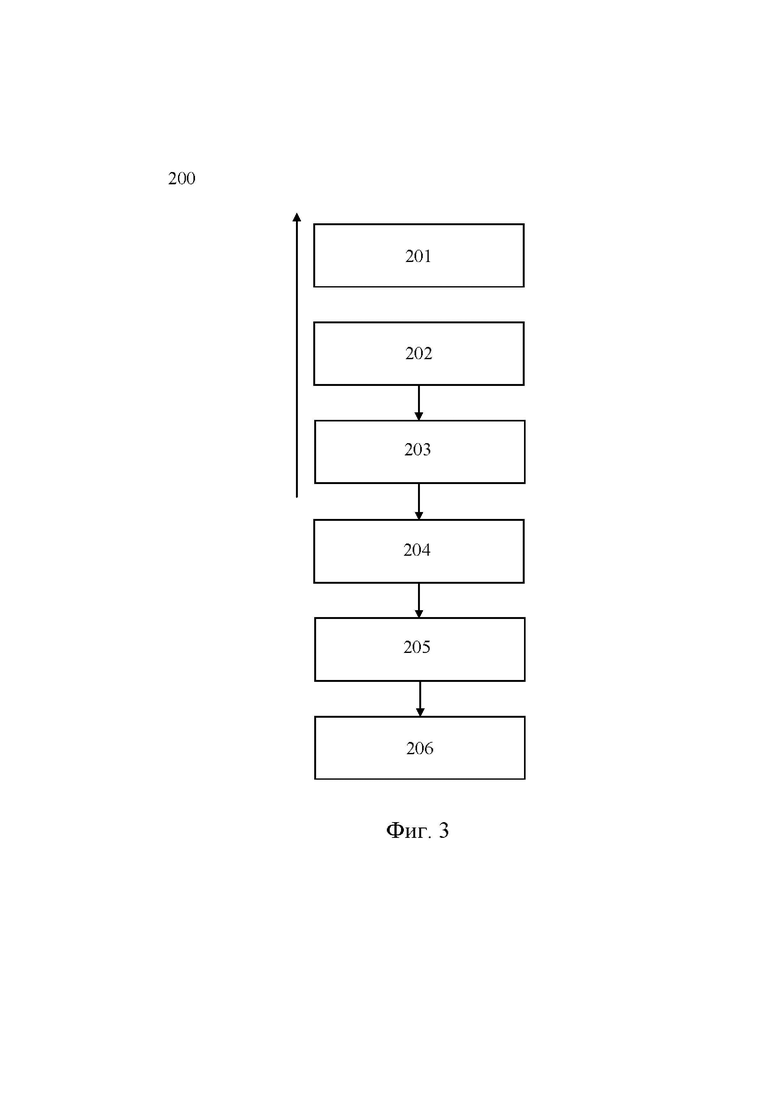
[0027] Фиг. 3 – блок-схема этапов способа бесконтактного определения механических напряжений в трубопроводе.
Осуществление изобретения:
[0028] Схематическое системы 100 бесконтактного определения механических напряжений в трубопроводе 108 показано на фиг. 1. Система 100 содержит устройство 101 бесконтактного измерения механических напряжений в трубопроводе 108 и вычислительное устройство 102 определения механических напряжений. При этом устройство 101 включает первое устройство 103 бесконтактного измерения плотности магнитного потока, второе устройство 104 бесконтактного измерения плотности магнитного потока и третье устройство 105 бесконтактного измерения плотности магнитного потока. Вычислительное устройство 102 содержит процессор 106 и память 107. Процессор 106 соединен с памятью 107 посредством шины (не показана на фиг.) приема и передачи данных. Вычислительное устройство 102 соединено с устройством 103 бесконтактного измерения посредством канала приема и передачи данных. Необходимо отметить, что в альтернативном варианте исполнения настоящего решения вычислительное устройство 102 и устройство 103 могут быть разнесены друг от друга в пространстве и соединены между собой проводными и/или беспроводными линиями связи. В качестве линий связи могут быть использованы, например, линия связи SPI, Bluetooth, Wifi, GPRS/LTE, или акустические электромагнитные системы коммуникации под водой. Устройства 103, 104 и 105 бесконтактного измерения плотности магнитного потока находятся в составе устройства 103 бесконтактного измерения плотности магнитного потока и в его составе передают данные измерения процессору 106, находящемся в составе вычислительного устройства 102. В контексте настоящего решения под измерением подразумевают последовательное сканирование в процессе перемещения устройства 101 вдоль оси трубопровода на удаленном от него расстоянии.
[0029] Необходимо отметить, что операции калибровки данных характеристических параметров, вычисления распределения механических напряжений в каждой измеренной точке на всем протяжении трубопровода 108 посредством матричных преобразований и определения механических напряжений в трубопроводе 108 на основании вычисленного распределения механических напряжений в каждой измеренной точке на всем протяжении трубопровода 108 согласно настоящему решению выполняются посредством процессора 106. В контексте настоящего решения механическое напряжение – это векторная величина. Степень корреляции направлений действия внешних сил и внутренних напряжений вокруг дефекта будет являться наиболее значимым фактором для оценки безопасности трубопровода 108.
[0030] Как было указано выше, устройство 101 бесконтактного измерения механических напряжений в трубопроводе 108 содержит, по меньшей мере, три устройства 103, 104, 105 бесконтактного измерения плотности магнитного потока и выполнено с возможностью перемещения вдоль оси трубопровода 108 на удаленном от него расстоянии с последующей передачей вычислительному устройству 102 данных о механических напряжениях в трубопроводе. Упомянутые данные содержат информацию о форме распределения механических напряжений. Необходимо отметить, что форма распределения механических напряжений может быть разной. Например, направленные напряжения вдоль и поперек оси трубопровода, могут иметь разную опасность при этом уровень амплитуды магнитного поля и соответственно отклонение приращения модуля вектора магнитного поля Земли от средних фоновых значений может быть одинаковым. Но опасность трубопровода в области каждой такой трещины будет разной. При одинаковом внутреннем давлении продольное расположение дефекта существенно увеличивает кольцевые напряжения в сравнении с поперечным дефектом. В качестве альтернативы устройство 101 бесконтактного измерения механических напряжений в трубопроводе может быть выполнено в виде рамы из немагнитных материалов с возможностью изменять апертуры (базы датчиков) каждого устройства бесконтактного измерения плотности магнитного потока в зависимости от диаметра трубопровода 108 и расстояния до его оси с последующим преобразованием системы координат в цилиндрическую систему координат, связанную с осью трубопровода. Также в качестве альтернативы устройство 101 бесконтактного измерения механических напряжений в трубопроводе может дополнительно содержать систему датчиков контроля, включающую датчики давления (не показано на фиг.), модуль GPS или GLONASS (не показано на фиг.) для обеспечения возможности определения местоположения устройства по отношению к оси трубопровода 108 в горизонтальной и вертикальной плоскостях, под водой или в воздухе. Альтернативно, устройство 101 бесконтактного измерения механических напряжений в трубопроводе 108 может дополнительно содержать множество гироскопов и акселерометров (не показано на фиг.), выполненных с возможностью определения текущего состояния и точного положения упомянутого устройства в системе координат, связанной с трубопроводом 108, в момент измерения в условиях возможных колебаний для обеспечения возможности определения расстояния от начального участка измерения до конечного участка измерения. Альтернативно устройство 101 бесконтактного измерения механических напряжений в трубопроводе может дополнительно содержать датчик-маяк (не показано на фиг.), выполненный в виде энергонезависимого источника электромагнитного излучения для обеспечения возможности обнаружения устройства бесконтактного измерения в случае его применения на носителе, управляемым оператором удаленно.
[0031] Каждое из упомянутых устройств 103, 104 и 105 включает массив датчиков (не показан на фиг.), выполненный с возможностью измерения плотности магнитного потока путем последовательного бесконтактного измерения характеристических параметров вдоль оси трубопровода 108. В качестве характеристических параметров используют градиенты индукции магнитного поля dB, характеризующие изменение плотности магнитного потока, проходящего через массив датчиков в процессе перемещения упомянутого устройства 101 бесконтактного измерения механических напряжений вдоль оси трубопровода 108 на удаленном от него расстоянии. В качестве альтернативы по меньшей мере, один массив датчиков может быть выполнен по дифференциальной схеме включения. Также в качестве альтернативы массив датчиков, по меньшей мере, одного устройства бесконтактного измерения плотности магнитного потока может быть выполнен в виде массива феррозондовых датчиков, выполненных с возможностью регулировки частоты тока возбуждения, и бесконтактного измерения плотности магнитного потока резонансного характера с последующим определением вида неоднородности или особенности трубопровода 108 (дефекта), как результата корреляции с частотой собственных колебаний такой неоднородности или особенности. Альтернативно, каждое из упомянутых устройств бесконтактного измерения плотности магнитного потока может быть выполнено с возможностью изменения положений вдоль окружности распределения силовых линий магнитного потока, направленных от центра оси трубопровода или силовых линий магнитного потока, направленных к центру оси трубопровода для преобразования измерений в цилиндрическую систему координат.
[0032] Первое устройство 103 бесконтактного измерения плотности магнитного потока выполнено с возможностью бесконтактного измерения плотности магнитного потока в плоскости YZ (см. фиг. 2, плоскость, ограниченная точками 1-2-3-4-5-6). Плоскость YZ определяет область действия поперечных кольцевых напряжений трубопровода. Второе устройство 104 бесконтактного измерения плотности магнитного потока выполнено с возможностью бесконтактного измерения плотности магнитного потока в плоскости XY (см. фиг. 2, плоскость, ограниченная точками 1-2-7-8). Плоскость XY определяет область действия продольно-горизонтальных напряжений трубопровода и изгибающих моментов. Третье устройство 105 бесконтактного измерения плотности магнитного потока выполнено с возможностью бесконтактного измерения плотности магнитного потока в двух плоскостях XZ, расположенных на расстоянии друг от друга (см. фиг. 2, плоскости, ограниченные точками 3-5-7 и 4-6-8). Упомянутые плоскости XZ определяют область действия продольно-вертикальных напряжений и изгибающих моментов. В контексте настоящего решения упомянутые бесконтактные измерения происходят одновременно в плоскостях YZ, XY и двух плоскостях XZ. Т.е. для бесконтактных измерений в плоскостях YZ, XY и двух плоскостях XZ в данном решении отсутствует необходимость изменения ориентации (перемещать и вращать в пространстве) устройства бесконтактного измерения механических напряжений в трубопроводе 108. В качестве альтернативы плоскости YZ, XY и две плоскости XZ могут быть расположены в системе координат, пространственно связанной с трубопроводом 108.
[0033] Вычислительное устройство 102 определения механических напряжений содержит память 107, соединенную с процессором и выполнено с возможностью приема от устройства 101 бесконтактного измерения механических напряжений в трубопроводе 108 и передачи управляющих данных упомянутому устройству 101 бесконтактного измерения посредством канала приема и передачи данных. Процессор 106 выполнен с возможностью выполнения следующих операций: приема от устройства 101 бесконтактного измерения механических напряжений в трубопроводе 108 данных характеристических параметров в виде градиентов индукции магнитного поля dB, которые характеризуют изменение плотности магнитного потока, калибровки данных характеристических параметров на основании принятых от упомянутого устройства бесконтактного измерения данных, при которой по известным данным определяют калибровочные коэффициенты, характеризующие магнитомеханическое состояние однородного трубопровода 108 на всей его протяженности как зависимость изменения плотности магнитного потока от изменения механического момента, вычисления распределения механических напряжений в каждой измеренной точке на всем протяжении трубопровода 108 посредством матричных преобразований, где в результате матричных преобразований определяют приращения главного вектора напряжений в каждой измеренной точке, и определения механических напряжений в трубопроводе 108 на основании вычисленного распределения механических напряжений в каждой измеренной точке на всем протяжении трубопровода 108, где при заданных критериях предельных значений напряжений определяют аномалии.
[0034] Калибровочные коэффициенты определяются в виде отношений магнитных и механических моментов. Упомянутая калибровка определяется как из условий заранее известных отличий магнитных моментов в двух различных сечениях трубопровода 108 или известных отличий механических моментов для условий разницы во внутреннем давлении или температуры. Поперечные кольцевые, продольно-горизонтальные и продольно-вертикальные напряжения вычисляют отдельно как проекции главного вектора напряжений на соответствующие плоскости, лежащие в области действия напряжений. По максимальной величине отклонения от допустимых значений механических напряжений судят о величине концентрации механических напряжений, а по форме распределения механических напряжений судят о характере источника аномалии (например, продольное расположение дефекта, поперечное расположение дефекта, продольно-поперечное расположение дефекта и др.).
[0035] Память 107 содержит базу данных (не показана на фиг.) механических напряжений в трубопроводе 108, и выполнена с возможностью приема от упомянутого процессора 106 и сохранения характеристических параметров в виде градиентов индукции магнитного поля dB, определенных калибровочных коэффициентов и вычисленных распределений механических напряжений в каждой измеренной точке на всем протяжении трубопровода 108.
[0036] Настоящее решение может выполнять бесконтактное определение механических напряжений в трубопроводе 108 над трубопроводом, расположенным, по меньшей мере, в одном из следующем местоположении: в гористой местности, в заболоченной местности, в местности с подвижками грунта и оползневыми эффектами, местности с повышенной сейсмоактивностью, в водной среде с возможными провисами.
[0037] Далее в качестве примера реализации в соответствии с фиг. 3 будут описаны этапы способа 200 бесконтактного определения механических напряжений в трубопроводе.
[0038] На первом этапе 201 бесконтактно измеряют плотность магнитного потока посредством массивов датчиков путем последовательного бесконтактного измерения характеристических параметров вдоль оси трубопровода. В качестве характеристических параметров используют градиенты индукции магнитного поля dB, характеризующие изменение плотности магнитного потока, проходящего через массив датчиков в процессе их перемещения вдоль оси трубопровода 108 на удаленном от него расстоянии. Бесконтактное измерение плотности магнитного потока включает бесконтактное измерение плотности магнитного потока в плоскости YZ, бесконтактное измерение плотности магнитного потока в плоскости XY и бесконтактное измерение плотности магнитного потока в двух плоскостях XZ, расположенных на расстоянии друг от друга. Плоскость YZ определяет область действия поперечных кольцевых напряжений трубопровода, плоскость XY определяет область действия продольно-горизонтальных напряжений трубопровода и изгибающих моментов, а упомянутые плоскости XZ определяют область действия продольно-вертикальных напряжений и изгибающих моментов. Упомянутые бесконтактные измерения происходят одновременно в плоскостях YZ, XY и двух плоскостях XZ. После бесконтактного измерения плотности магнитного потока способ переходит к этапу 202.
[0039] На этапе 202 принимают вычислительным устройством 102 данные характеристических параметров в виде градиентов индукции магнитного поля dB, которые характеризуют изменение плотности магнитного потока. После приема упомянутых данных, способ переходит к этапу 203.
[0040] На этапе 203 выполняют упомянутым вычислительным устройством 102 калибровку данных характеристических параметров на основании принятых данных, при которой по известным данным определяют калибровочные коэффициенты, характеризующие магнитомеханическое состояние однородного трубопровода на всей его протяженности как зависимость изменения плотности магнитного потока от изменения механического момента. Калибровочные коэффициенты определяются в виде отношений магнитных и механических моментов. Упомянутая калибровка определяется как из условий заранее известных отличий магнитных моментов в двух различных сечениях трубопровода или известных отличий механических моментов для условий разницы во внутреннем давлении или температуры. После упомянутой калибровки способ переходит к этапу 204.
[0041] На этапе 204 упомянутым вычислительным устройством 102 вычисляют распределения механических напряжений в каждой измеренной точке на всем протяжении трубопровода 108 посредством матричных преобразований. В результате матричных преобразований определяют приращения главного вектора напряжений в каждой измеренной точке. Поперечные кольцевые, продольно-горизонтальные и продольно-вертикальные напряжения вычисляют отдельно как проекции главного вектора напряжений на соответствующие плоскости, лежащие в области действия напряжений. После упомянутого вычисления способ переходит к этапу 205.
[0042] На этапе 205 упомянутым вычислительным устройством 102 определяют механические напряжения в трубопроводе 108 на основании вычисленного распределения механических напряжений в каждой измеренной точке на всем протяжении трубопровода. При заданных критериях предельных значений напряжений определяют аномалии. По максимальной величине отклонения от допустимых значений механических напряжений судят о величине концентрации механических напряжений, а по форме распределения механических напряжений судят о характере источника аномалии. После упомянутого определения способ переходит к этапу 206.
[0043] На этапе 206 выполняется автоматическое сохранение в базу данных механических напряжений характеристических параметров в виде градиентов индукции магнитного поля dB, определенных калибровочных коэффициентов и вычисленных распределений механических напряжений в каждой измеренной точке на всем протяжении трубопровода 108.
[0044] Также далее будут приведены различные примеры осуществления настоящего решения.
[0045] Пример 1. Для определения калибровочных коэффициентов в кольцевой составляющих магнитного потока происходит выбор и назначение двух контрольных сечения трубопровода с разным уровнем магнитного сигнала. Магнитные M1, M2 и механические моменты S1, S2 определяют контактными способами в каждом из обоих выбранных сечений, как результат интегрирования соответствующих параметров по сечению, причем магнитный момент M определяется с учетом изначально выбранной разницы в интенсивности магнитных потоков, а механический момент S определяется разницей градиентов растягивающих и сжимающих напряжений в каждом из двух выбранных сечений. Упомянутые моменты могут быть получены стандартными способами, например, через коэрцитивную силу и с использованием метода конечных элементов. Для условий разности магнитных моментов в обоих сечениях dM = M2 - M1 определяют величину приращения механического момента dS = S2 - S1 в этих сечениях.
[0046] Калибровочные коэффициенты K, характеризующие магнитомеханическое состояние однородного трубопровода в области действия кольцевых, продольных и других видов напряжений, рассчитывают, как отношение приращений dS градиента механических моментов между двумя сечениями к величине приращения магнитного момента dM в этих же сечениях. (K = dS/dM)
[0047] Пример 2. Существуют условия, при которых проведение вскрытия трубопровода (шурфование) даже в одной/двух точках, требующих непосредственного контакта с поверхностью трубопровода, невозможно или затруднено (морские трубопроводы, трубопроводы внутри территорий заводов, насосных и компрессорных станций и другие). В этом случае возможно применить способ калибровки, при котором соответствующие коэффициенты калибровки могут быть определены из условий разницы в механических моментах. Для этого производится сканирование интенсивности магнитного потока дважды на ограниченном участке трубопровода при разных режимах нагрузки. Например, изменение давления в трубопроводе (причем необязательно повышение) либо температуры создают разные условия нагрузки с соответствующим механическим моментом dS, при этом фиксируется разницу в интенсивности магнитного потока dM. Далее, как и в Примере 1 рассчитываются калибровочные коэффициенты, характеризующие магнитомеханическое состояние однородного трубопровода, как отношение приращений dS градиента механического момента к величине приращения магнитного момента dM. (K = dS/dM).
[0048] Затем выполняется окончательная обработка данных, заключающаяся в получении распределения механических напряжений (кольцевых, продольных и других) вдоль оси всего трубопровода, которая является результатом применения калибровочных коэффициентов K к исходному распределению интенсивности магнитного потока B. S = K * B. Таким образом задача по определению механических напряжений (кольцевых, продольных, других) в области однородного металлического трубопровода может быть решена.
[0049] Хотя данное изобретение было показано и описано со ссылкой на определенные варианты его осуществления, специалистам в данной области техники будет понятно, что различные изменения и модификации могут быть сделаны в нем, не покидая фактический объем изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ВНУТРИТРУБНОГО ОПРЕДЕЛЕНИЯ МЕХАНИЧЕСКИХ НАПРЯЖЕНИЙ В ТРУБОПРОВОДЕ | 2021 |
|
RU2778718C1 |
| СПОСОБ БЕСКОНТАКТНОГО ВЫЯВЛЕНИЯ МЕСТОПОЛОЖЕНИЯ И ХАРАКТЕРА ДЕФЕКТОВ МЕТАЛЛИЧЕСКИХ СООРУЖЕНИЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2264617C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ БЕСКОНТАКТНОЙ ДИАГНОСТИКИ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ПОДЗЕМНЫХ ТРУБОПРОВОДОВ | 2014 |
|
RU2568808C2 |
| СПОСОБ И УСТРОЙСТВО ДИАГНОСТИКИ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ПОДЗЕМНЫХ ТРУБОПРОВОДОВ | 2012 |
|
RU2504763C1 |
| ИЗМЕРИТЕЛЬНЫЙ ДАТЧИК ВИБРАЦИОННОГО ТИПА, СПОСОБ ИЗГОТОВЛЕНИЯ ИЗМЕРИТЕЛЬНОГО ДАТЧИКА И ИЗМЕРИТЕЛЬНАЯ СИСТЕМА, ПРИМЕНЕНИЕ ИЗМЕРИТЕЛЬНОГО ДАТЧИКА | 2010 |
|
RU2526296C2 |
| ИЗМЕРИТЕЛЬНЫЙ ДАТЧИК ВИБРАЦИОННОГО ТИПА И ИЗМЕРИТЕЛЬНАЯ СИСТЕМА ДЛЯ ИЗМЕРЕНИЯ ПЛОТНОСТИ И/ИЛИ ПРОЦЕНТА МАССОВОГО РАСХОДА | 2012 |
|
RU2589506C2 |
| Способ бесконтактного выявления наличия, месторасположения и степени опасности концентраторов механических напряжений в металле ферромагнитных сооружений | 2019 |
|
RU2724582C1 |
| ИЗМЕРИТЕЛЬНАЯ СИСТЕМА ДЛЯ ИЗМЕРЕНИЯ ПЛОТНОСТИ ИЛИ ВЕСОВОЙ ПРОПУСКНОЙ СПОСОБНОСТИ ПРОТЕКАЮЩЕЙ В ТРУБОПРОВОДЕ СРЕДЫ | 2011 |
|
RU2557409C2 |
| СИСТЕМА И СПОСОБ ДЛЯ ИНСПЕКТИРОВАНИЯ ПОДВОДНЫХ ТРУБОПРОВОДОВ | 2011 |
|
RU2635751C2 |
| Способ исследования структуры магнитных полей с использованием лазерного излучения | 2020 |
|
RU2751462C1 |
Группа изобретений относится к области измерительной техники с применением вычислительных технологий и может быть использовано в области промышленности, которая эксплуатирует трубопроводы. Система бесконтактного определения механических напряжений в трубопроводе содержит устройство бесконтактного измерения механических напряжений в трубопроводе, при этом устройство бесконтактного измерения плотности магнитного потока включает массив датчиков, выполненный с возможностью измерения плотности магнитного потока путем последовательного бесконтактного измерения характеристических параметров вдоль оси трубопровода, при этом в качестве характеристических параметров используют градиенты индукции магнитного поля dB, характеризующие изменение плотности магнитного потока, проходящего через массив датчиков в процессе перемещения устройства бесконтактного измерения механических напряжений вдоль оси трубопровода на удаленном от него расстоянии, а также вычислительное устройство определения механических напряжений. Технический результат – повышение точности определения механических напряжений с одновременной точностью обнаружения источника аномалии в трубопроводе. 2 н. и 15 з.п. ф-лы, 3 ил.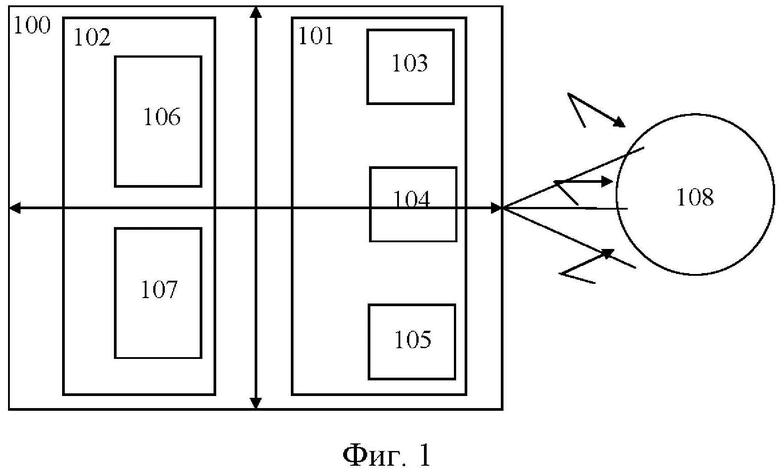
1. Система бесконтактного определения механических напряжений в трубопроводе, содержащая:
- устройство бесконтактного измерения механических напряжений в трубопроводе, содержащее, по меньшей мере, три устройства бесконтактного измерения плотности магнитного потока, и выполненное с возможностью перемещения вдоль оси трубопровода на удаленном от него расстоянии с последующей передачей вычислительному устройству данных о механических напряжениях в трубопроводе, где данные содержат информацию о форме распределения механических напряжений;
- при этом каждое из упомянутых устройств бесконтактного измерения плотности магнитного потока включает массив датчиков, выполненный с возможностью измерения плотности магнитного потока путем последовательного бесконтактного измерения характеристических параметров вдоль оси трубопровода, при этом в качестве характеристических параметров используют градиенты индукции магнитного поля dB, характеризующие изменение плотности магнитного потока, проходящего через массив датчиков в процессе перемещения упомянутого устройства бесконтактного измерения механических напряжений вдоль оси трубопровода на удаленном от него расстоянии, где:
- первое устройство бесконтактного измерения плотности магнитного потока выполнено с возможностью бесконтактного измерения плотности магнитного потока в плоскости YZ, где плоскость YZ определяет область действия поперечных кольцевых напряжений трубопровода,
- второе устройство бесконтактного измерения плотности магнитного потока выполнено с возможностью бесконтактного измерения плотности магнитного потока в плоскости XY, где плоскость XY определяет область действия продольно-горизонтальных напряжений трубопровода и изгибающих моментов,
- третье устройство бесконтактного измерения плотности магнитного потока выполнено с возможностью бесконтактного измерения плотности магнитного потока в двух плоскостях XZ, расположенных на расстоянии друг от друга, где упомянутые плоскости XZ определяют область действия продольно-вертикальных напряжений и изгибающих моментов; при этом упомянутые бесконтактные измерения происходят одновременно в плоскостях YZ, XY и двух плоскостях XZ;
- вычислительное устройство определения механических напряжений, содержащее память, соединенную с процессором, выполненное с возможностью приема от устройства бесконтактного измерения механических напряжений в трубопроводе и передачи управляющих данных упомянутому устройству бесконтактного измерения посредством канала приема и передачи данных; при этом процессор выполнен с возможностью:
а) приема от устройства бесконтактного измерения механических напряжений в трубопроводе данных характеристических параметров в виде градиентов индукции магнитного поля dB, которые характеризуют изменение плотности магнитного потока,
б) калибровки данных характеристических параметров на основании принятых от упомянутого устройства бесконтактного измерения данных, при которой по известным данным определяют калибровочные коэффициенты, характеризующие магнитомеханическое состояние однородного трубопровода на всей его протяженности как зависимость изменения плотности магнитного потока от изменения механического момента, при этом калибровочные коэффициенты определяются в виде отношений магнитных и механических моментов, причем упомянутая калибровка определяется как из условий заранее известных отличий магнитных моментов в двух различных сечениях трубопровода или известных отличий механических моментов для условий разницы во внутреннем давлении или температуры;
в) вычисления распределения механических напряжений в каждой измеренной точке на всем протяжении трубопровода посредством матричных преобразований, где в результате матричных преобразований определяют приращения главного вектора напряжений в каждой измеренной точке, при этом поперечные кольцевые, продольно-горизонтальные и продольно-вертикальные напряжения вычисляют отдельно как проекции главного вектора напряжений на соответствующие плоскости, лежащие в области действия напряжений; и
г) определения механических напряжений в трубопроводе на основании вычисленного распределения механических напряжений в каждой измеренной точке на всем протяжении трубопровода, где при заданных критериях предельных значений напряжений определяют аномалии, при этом по максимальной величине отклонения от допустимых значений механических напряжений судят о величине концентрации механических напряжений, а по форме распределения механических напряжений судят о характере источника аномалии;
при этом память содержит базу данных механических напряжений в трубопроводе и выполнена с возможностью приема от упомянутого процессора и сохранения характеристических параметров в виде градиентов индукции магнитного поля dB, определенных калибровочных коэффициентов и вычисленных распределений механических напряжений в каждой измеренной точке на всем протяжении трубопровода.
2. Система по п. 1, отличающаяся тем, что бесконтактное определение механических напряжений в трубопроводе выполняется над трубопроводом, расположенным, по меньшей мере, в одном из следующем местоположении: в гористой местности, в заболоченной местности, в местности с подвижками грунта и оползневыми эффектами, местности с повышенной сейсмоактивностью, в водной среде с возможными провисами.
3. Система по п. 1, отличающаяся тем, что, по меньшей мере, один массив датчиков выполнен по дифференциальной схеме включения.
4. Система по п. 1, отличающаяся тем, что плоскости YZ, XY и две плоскости XZ расположены в системе координат, пространственно связанной с трубопроводом.
5. Система по п. 1, отличающаяся тем, что устройство бесконтактного измерения механических напряжений в трубопроводе выполнено в виде рамы из немагнитных материалов с возможностью изменять апертуры каждого устройства бесконтактного измерения плотности магнитного потока в зависимости от диаметра трубопровода и расстояния до его оси с последующим преобразованием системы координат в цилиндрическую систему координат, связанную с осью трубопровода.
6. Система по п. 1, отличающаяся тем, что массив датчиков, по меньшей мере, одного устройства бесконтактного измерения плотности магнитного потока выполнен в виде массива феррозондовых датчиков, выполненных с возможностью регулировки частоты тока возбуждения, и бесконтактного измерения плотности магнитного потока резонансного характера с последующим определением вида неоднородности или особенности трубопровода (дефекта), как результата корреляции с частотой собственных колебаний такой неоднородности или особенности.
7. Система по п. 1, отличающаяся тем, что устройство бесконтактного измерения механических напряжений в трубопроводе дополнительно содержит систему датчиков контроля, включающую датчики давления, модуль GPS или GLONASS для обеспечения возможности определения местоположения устройства по отношению к оси трубопровода в горизонтальной и вертикальной плоскостях, под водой или в воздухе.
8. Система по п. 1, отличающаяся тем, что каждое из устройств бесконтактного измерения плотности магнитного потока выполнено с возможностью изменения положений вдоль окружности распределения силовых линий магнитного потока, направленных от центра оси трубопровода или силовых линий магнитного потока, направленных к центру оси трубопровода для преобразования измерений в цилиндрическую систему координат.
9. Система по п. 1, отличающаяся тем, что устройство бесконтактного измерения механических напряжений в трубопроводе дополнительно содержит множество гироскопов и акселерометров, выполненных с возможностью определения текущего состояния и точного положения упомянутого устройства в системе координат, связанной с трубопроводом, в момент измерения в условиях возможных колебаний для обеспечения возможности определения расстояния от начального участка измерения до конечного участка измерения.
10. Система по п. 1, отличающаяся тем, что устройство бесконтактного измерения механических напряжений в трубопроводе дополнительно содержит датчик-маяк, выполненный в виде энергонезависимого источника электромагнитного излучения для обеспечения возможности обнаружения устройства бесконтактного измерения в случае его применения на носителе, управляемым оператором удаленно.
11. Система по п. 1, отличающаяся тем, что устройство бесконтактного измерения механических напряжений в трубопроводе и вычислительное устройство определения механических напряжений разнесены друг от друга в пространстве и соединены между собой проводными и/или беспроводными линиями связи.
12. Способ бесконтактного определения механических напряжений в трубопроводе, включающий этапы, на которых:
- бесконтактно измеряют плотность магнитного потока посредством массивов датчиков путем последовательного бесконтактного измерения характеристических параметров вдоль оси трубопровода, при этом в качестве характеристических параметров используют градиенты индукции магнитного поля dB, характеризующие изменение плотности магнитного потока, проходящего через массив датчиков в процессе их перемещения вдоль оси трубопровода на удаленном от него расстоянии, где измерение плотности магнитного потока включает:
i) бесконтактное измерение плотности магнитного потока в плоскости YZ, где плоскость YZ определяет область действия поперечных кольцевых напряжений трубопровода,
ii) бесконтактное измерение плотности магнитного потока в плоскости XY, где плоскость XY определяет область действия продольно-горизонтальных напряжений трубопровода и изгибающих моментов,
iii) бесконтактное измерение плотности магнитного потока в двух плоскостях XZ, расположенных на расстоянии друг от друга, где упомянутые плоскости XZ определяют область действия продольно-вертикальных напряжений и изгибающих моментов; при этом упомянутые бесконтактные измерения происходят одновременно в плоскостях YZ, XY и двух плоскостях XZ;
- принимают вычислительным устройством определения механических напряжений данные характеристических параметров в виде градиентов индукции магнитного поля dB, которые характеризуют изменение плотности магнитного потока,
- выполняют упомянутым вычислительным устройством калибровку данных характеристических параметров на основании принятых данных, при которой по известным данным определяют калибровочные коэффициенты, характеризующие магнитомеханическое состояние однородного трубопровода на всей его протяженности как зависимость изменения плотности магнитного потока от изменения механического момента, при этом калибровочные коэффициенты определяются в виде отношений магнитных и механических моментов, причем упомянутая калибровка определяется как из условий заранее известных отличий магнитных моментов в двух различных сечениях трубопровода или известных отличий механических моментов для условий разницы во внутреннем давлении или температуры;
- упомянутым вычислительным устройством вычисляют распределения механических напряжений в каждой измеренной точке на всем протяжении трубопровода посредством матричных преобразований, где в результате матричных преобразований определяют приращения главного вектора напряжений в каждой измеренной точке, при этом поперечные кольцевые, продольно-горизонтальные и продольно-вертикальные напряжения вычисляют отдельно как проекции главного вектора напряжений на соответствующие плоскости, лежащие в области действия напряжений; и
- упомянутым вычислительным устройством определяют механические напряжения в трубопроводе на основании вычисленного распределения механических напряжений в каждой измеренной точке на всем протяжении трубопровода, где при заданных критериях предельных значений напряжений определяют аномалии, при этом по максимальной величине отклонения от допустимых значений механических напряжений судят о величине концентрации механических напряжений, а по форме распределения механических напряжений судят о характере источника аномалии; и
- сохраняют в базу данных механических напряжений характеристические параметры в виде градиентов индукции магнитного поля dB, определенные калибровочные коэффициенты и вычисленные распределения механических напряжений в каждой измеренной точке на всем протяжении трубопровода.
13. Способ по п. 12, отличающийся тем, что бесконтактное определение механических напряжений в трубопроводе выполняется над трубопроводом, расположенным, по меньшей мере, в одном из следующем местоположении: в гористой местности, в заболоченной местности, в местности с подвижками грунта и оползневыми эффектами, местности с повышенной сейсмоактивностью, в водной среде с возможными провисами.
14. Способ по п. 12, отличающийся тем, что плоскости YZ, XY и две плоскости XZ расположены в системе координат, пространственно связанной с трубопроводом.
15. Способ по п. 12, отличающийся тем, что дополнительно включает этап определения местоположения массива датчиков по отношению к оси трубопровода в горизонтальной и вертикальной плоскостях, под водой или в воздухе посредством датчиков давления или модуля GPS/GLONASS.
16. Способ по п. 12, отличающийся тем, что дополнительно включает этап изменения положений массивов датчиков вдоль окружности распределения силовых линий магнитного потока, направленных от центра оси трубопровода или силовых линий магнитного потока, направленных к центру оси трубопровода для преобразования измерений в цилиндрическую систему координат.
17. Способ по п. 12, отличающийся тем, что дополнительно включает этап определения посредством множества гироскопов и акселерометров текущего состояния и точного положения массивов датчиков в системе координат, связанной с трубопроводом, в момент измерения в условиях возможных колебаний для обеспечения возможности определения расстояния от начального участка измерения до конечного участка измерения.
| US 2016231278 A1, 11.08.2016 | |||
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕХАНИЧЕСКИХ НАПРЯЖЕНИЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2195636C2 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ МЕХАНИЧЕСКИХ НАПРЯЖЕНИЙ В МЕТАЛЛИЧЕСКИХ ИЗДЕЛИЯХ | 1994 |
|
RU2079825C1 |
| US 10364665 B2, 30.07.2019. | |||

