ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее изобретение относится к системе для причаливания аэростата к подвижной или фиксированной приемной конструкции. Кроме того, оно относится к способу причаливания, реализуемому в этой системе, а также к аэростату, снабженному такой системой, и к соответствующей приемной конструкции.
Более конкретно, но без ограничения, изобретение относится к области управляемых аэростатов.
УРОВЕНЬ ТЕХНИКИ
Причаливание крупных управляемых аэростатов к причальным мачтам всегда сопровождается сложным маневрированием, при выполнении которого требуется привлечение большого количества людей на земле, иногда более сотни, что отнимает много времени и является опасным как для экипажей этих аэростатов, так и для людей на земле.
Кроме того, пилотирование этих управляемых аэростатов при подходе к приемным конструкциям на земле обычно является сложным вследствие аэродинамических условий, которые иногда являются неблагоприятными при подходе к земле, и вследствие большой инерции, присущей этим воздушным летательным аппаратам.
Задача настоящего изобретения заключается в исключении этих недостатков с помощью предложенной системы для причаливания, которая может облегчить подход аэростата к приемной конструкции и обеспечить более легкое и более безопасное причаливание в реальных условиях.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
Данная задача решается системой для причаливания аэростата к приемной конструкции, отличающейся тем, что она содержит по меньшей мере один беспилотный летательный аппарат, которым можно управлять для перемещения между аэростатом и приемной конструкцией при переносе первого конца причального троса, второй конец которого прикреплен к аэростату или к приемной конструкции, и для прикрепления этого первого конца к приемной конструкции или к аэростату, чтобы этот трос соединял аэростат с приемной конструкцией.
Таким образом, благодаря созданию механического соединения с помощью троса между аэростатом и приемной конструкцией посредством беспилотного летательного аппарата становится намного легче приводить носовую часть аэростата ближе к приемной конструкции даже при неблагоприятных погодных условиях.
Предпочтительно, чтобы система для причаливания согласно изобретению могла также содержать средство для наматывания троса, соединяющего аэростат с приемной конструкцией, с тем, чтобы приводить аэростат ближе к приемной конструкции.
В частности, в версии системы для причаливания согласно изобретению намоточное средство содержит намоточное устройство, расположенное в аэростате.
В другой версии намоточное средство содержит намоточное устройство, расположенное на приемной конструкции.
Предпочтительно, чтобы намоточное устройство могло содержать снабженную двигателем лебедку, имеющую по существу вертикальную ось вращения, расположенную на верхней части приемной конструкции. Эта снабженная двигателем лебедка содержит, например, барабан, снабженный пазом, предназначенным для приема конца причального троса.
Предпочтительно, чтобы система для причаливания согласно изобретению была приспособлена для высвобождения беспилотного летательного аппарата после прикрепления первого конца троса к приемной конструкции или к аэростату.
В конкретном варианте осуществления системы для причаливания согласно изобретению беспилотный летательный аппарат выполнен так, что он может быть расположен в аэростате, этот беспилотный летательный аппарат выполнен управляемым для (i) переноса к приемной конструкции первого конца причального кабеля, второй конец которого прикреплен к аэростату, и (ii) прикрепления первого конца к приемной конструкции.
В другом варианте осуществления системы для причаливания согласно изобретению беспилотный летательный аппарат выполнен с возможностью взлета с приемной конструкции, этот беспилотный летательный аппарат выполнен управляемым для (i) переноса к аэростату первого конца причального троса, второй конец которого прикреплен к приемной конструкции, и (ii) прикрепления первого конца к аэростату.
В конкретной версии изобретения причальный трос содержит множество последовательных отрезков с последовательно возрастающими диаметрами, при этом первый из этих отрезков имеет наименьший диаметр и заканчивается первым концом, предназначенным для переноса беспилотным летательным аппаратом.
В другой версии изобретения намоточное устройство, расположенное в приемной конструкции, соединено с механической соединительной системой, содержащей первый механический соединитель, расположенный в носовой части аэростата, и второй механический соединитель, расположенный на верхней части приемной конструкции, эти первый и второй механические соединители предназначены для механического соединения на конце намоточной последовательности причального троса.
Согласно другому аспекту изобретения предложен способ причаливания аэростата к приемной конструкции, реализуемый в системе для причаливания согласно изобретению, содержащий этапы управления по меньшей мере одним беспилотным летательным аппаратом, несущим первый конец причального троса, второй конец которого прикреплен к аэростату или к приемной конструкции, на всем протяжении пути, ведущего к приемной конструкции или к аэростату, и прикрепления первого конца причального троса к части приемной конструкции или аэростату.
Кроме того, способ причаливания согласно изобретению может содержать этап наматывания причального троса после прикрепления первого конца его к приемной конструкции или к аэростату до тех пор, пока часть аэростата по существу не достигнет части приемной конструкции.
Когда способ согласно изобретению реализуют в системе для причаливания согласно изобретению, объединенной с механической соединительной системой, этап наматывания причального троса осуществляют до получения соединения первого и второго механических соединителей, которыми соответственно снабжены аэростат и приемная конструкция.
Предпочтительно, чтобы способ причаливания согласно изобретению мог содержать этап высвобождения беспилотного летательного аппарата при сохранении прикрепления первого конца троса к приемной конструкции.
Управление последовательными этапами способа причаливания согласно изобретению может по меньшей мере частично осуществляться с аэростата и/или с земли.
Беспилотный летательный аппарат может быть запрограммирован для достижения в автономном режиме приемной конструкции с аэростата или аэростата с приемной конструкции.
Согласно еще одному аспекту изобретения предложены аэростат, снабженный системой для причаливания согласно изобретению, а также приемная конструкция, пригодная для приема этой системы для причаливания.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ И ОПИСАНИЕ ПРЕДПОЧТИТЕЛЬНЫХ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
Другие преимущества и признаки изобретения станут очевидными при чтении подробного описания реализаций и вариантов осуществления, которые никоим образом не являются ограничивающими, и из нижеследующих сопровождающих чертежей, на которых:
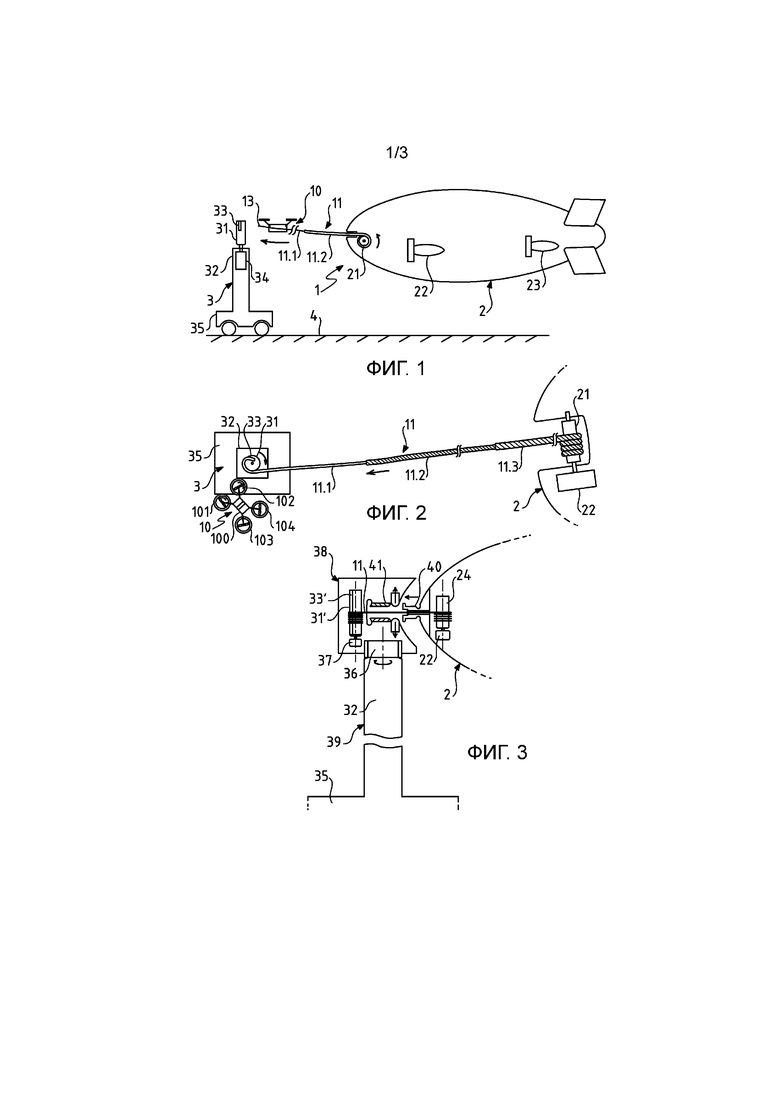
фиг. 1 - схематичный вид первой типичной реализации системы для причаливания согласно изобретению;
фиг. 2 - вид сверху системы для причаливания согласно изобретению, показанной на фиг. 1, на стадии удаления беспилотного летательного аппарата после присоединения троса к приемной конструкции;
фиг. 3 - схематичный вид конкретной конфигурации системы для причаливания согласно изобретению, образующей составную часть системы механического соединения аэростата с приемной конструкцией;
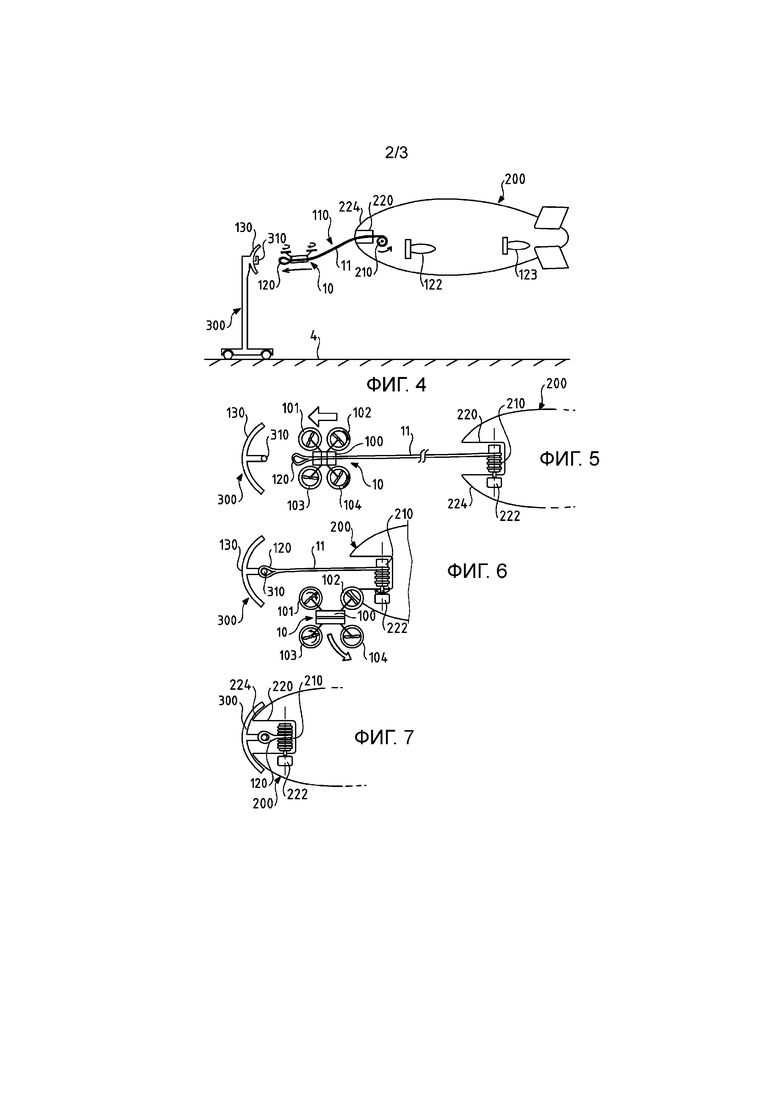
фиг. 4 - вид другой версии системы для причаливания согласно изобретению, в которой приемная конструкция снабжена зацепляющим устройством;
фиг. 5 - иллюстрация приближения беспилотного летательного аппарата, несущего причальный трос, к приемной конструкции системы для причаливания, показанной на фиг. 4;
фиг. 6 - схематичный вид, иллюстрирующий соединение причального троса с приемной конструкцией и удаление беспилотного летательного аппарата в конфигурации системы для причаливания, показанной на фиг. 4;
фиг. 7 - вид сверху, иллюстрирующий механическое соединение носовой части аэростата согласно изобретению с приемной конструкцией в конфигурации системы для причаливания, показанной на фиг. 4;
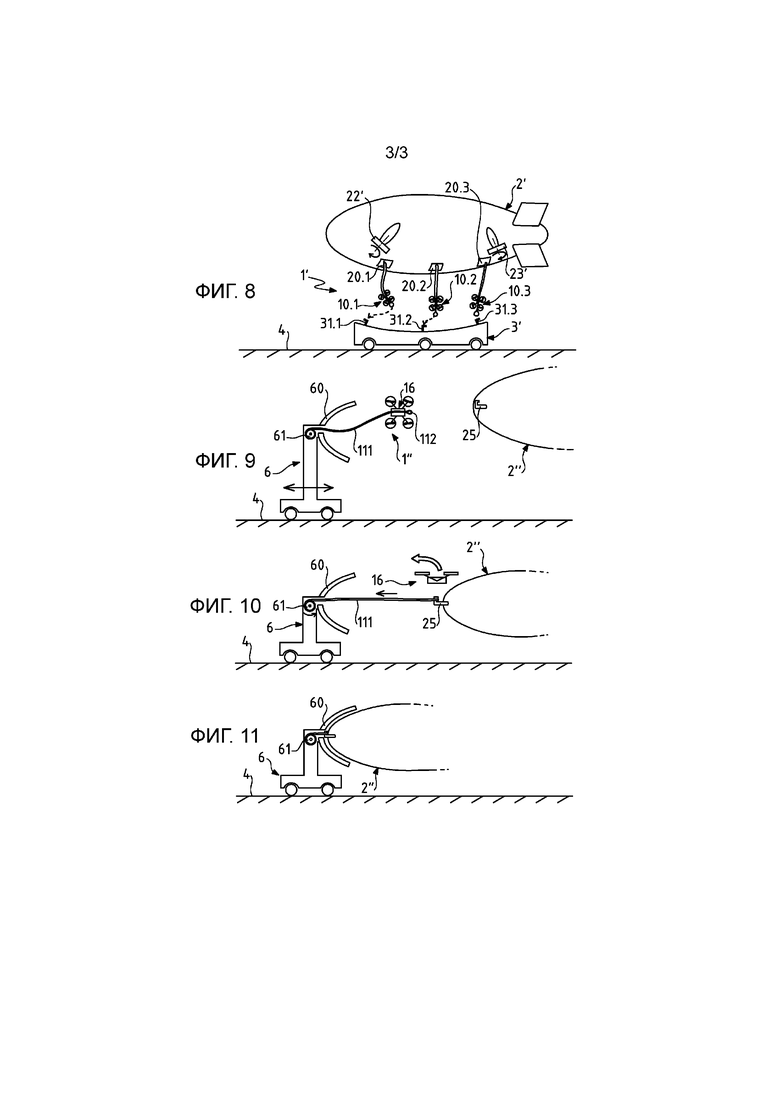
фиг. 8 - схематичный вид системы для причаливания согласно изобретению с множеством беспилотных летательных аппаратов;
фиг. 9 - схематичный вид другого варианта осуществления системы для причаливания согласно изобретению, в которой беспилотный летательный аппарат расположен в приемной конструкции, а носовая часть аэростата снабжена зацепляющим устройством;
фиг. 10 - иллюстрация этапа прикрепления причального троса к аэростату и отлета беспилотного летательного аппарата в конфигурации системы для причаливания, показанной на фиг. 9; и
фиг. 11 - иллюстрация механического соединения аэростата с приемной конструкцией, осуществляемого посредством системы для причаливания, показанной на фиг. 9 и 10.
В частности, поскольку эти варианты осуществления никак не ограничены, варианты изобретения можно считать содержащими только подборку характеристик, описанных или показанных в этой заявке ниже отдельно от других характеристик, описанных или показанных (даже если эта подборка является обособленной в пределах фразы, содержащей эти другие характеристики), если эта подборка характеристик является достаточной для придания технического преимущества или для установления отличия изобретения от предшествующего уровня техники. Эта подборка содержит по меньшей мере одну, предпочтительно функциональную, характеристику без деталей конструкции и/или только с частью деталей конструкции, если эта часть сама по себе является достаточной для придания технического преимущества или для установления отличия от предшествующего уровня техники.
Прежде всего, с обращением к фиг. 1 и 2 будут описаны первый вариант осуществления системы 1 для причаливания согласно изобретению и в то же время способ, реализуемый в этой системе.
Система 1 для причаливания содержит беспилотный летательный аппарат 10, управляемый для осуществления переноса причального троса 11, сматываемого с барабана 21, расположенного в передней части аэростата 2, снабженного реактивными двигателями 22, 23, к приемной конструкции 3.
Эта приемная конструкция 3 содержит основание 35, необязательно самоходное, опирающееся на грунт или на дорогу 4, и мачту 32, на верхней части которой расположена лебедка, содержащая тросовый барабан 31, вертикальный вал которого приводится в движение двигателем 34. Барабан 31 снабжен пазом 33, приспособленным для приема конца 13 причального троса.
Беспилотный летательный аппарат 10 является, например, четырехдвигательным с четырьмя воздушными винтами 101, 102, 103, 104 и содержит центральное устройство 100 для фиксации/освобождения причального троса.
Когда аэростат 2 находится на подходе к приемной конструкции 3, пилот инициирует процедуру причаливания с помощью беспилотного летального аппарата 10, взлетающего с аэростата, несущего конец 13 причального троса 11, фиксированного в центральном устройстве 100 беспилотного летательного аппарата 10. Тросовый барабан 21 находится в режиме свободного хода, что позволяет кабелю свободно сматываться и позволяет беспилотному летательному аппарату 10 вытягивать этот кабель при ограниченных тяговых усилиях. Беспилотный летательный аппарат 10 следует по оптимальному пути по направлению к барабану 31 на верхней части приемной конструкции 3 и управляется так, что вставляет конец 13 в приемный паз 33 барабана 31. После осуществления этого вставления беспилотный летательный аппарат 10 освобождается от причального троса 11.
Затем барабан 31 приводится в движение двигателем 34 для наматывания троса 11, второй конец которого с этого момента времени поддерживается фиксированным относительно аэростата 2 благодаря остановке барабана 21, расположенного в аэростате 2, или вследствие полного сматывания троса 2 с этого барабана 21. Как показано на фиг. 2, после этого беспилотный летательный аппарат 10 может уйти из зоны причаливания и возвратиться, например, на место зарядки электрической энергией или на аэростат 2.
Тросовый барабан 31, расположенный на приемной конструкции 3, приводится в движение до тех пор, пока носовая часть аэростата 2 не расположится в непосредственной близости к приемной зоне 3. Что касается фиг 2, то причальный трос 11 может содержать несколько отрезков, имеющих различные диаметры, например, первый отрезок 11.1, имеющий первый диаметр, второй отрезок 11.2, имеющий второй диаметр, который больше, чем первый, затем третий отрезок 11.3, имеющий третий диаметр, который больше, чем второй. Первый отрезок 11.1 меньшего диаметра имеет конец 13, который переносится беспилотным летательным аппаратом 10. В результате ограничивается весовая нагрузка, прикладываемая к беспилотному летательному аппарату 10 на первой части его пути к приемной конструкции 3. Кроме того, при проектировании троса можно распределить соответствующие длины отрезков троса так, чтобы гарантировать минимизацию веса троса, поддерживаемого беспилотным летательным аппаратом.
Кроме того, как показано на фиг. 3, система для причаливания согласно изобретению может быть соединена с приемной конструкцией при использовании механической соединительной системы аэростата. Поэтому можно выполнить приемную конструкцию 39, которая является фиксированной на грунте 4 и содержит на верхней части мачты 32 узел 38, который является подвижным при повороте посредством подшипникового механизма 36. Этот подвижный узел 38 включает в себя гнездовой механический соединитель 41, приспособленный для приема штыревого механического соединителя 40, прочно прикрепленного к носовой части аэростата 2, а также намоточное устройство 31', приводимое в движение двигателем 37.
После успешного вставления беспилотным летательным аппаратом 10, описанным с обращением к фиг. 1 и 2, конца 13 причального троса 11 в паз 33' барабана 31' он освобождается от троса 11 и удаляется от приемной конструкции, затем барабан 31' приводится в движение для наматывания троса 11 и тем самым для притягивания аэростата 2 до тех пор, пока он не приблизится к подвижному узлу 38, а штыревой механический соединитель 40 не войдет в гнездовой механический соединитель 41, и поэтому будет обеспечиваться механическое соединение аэростата 2 с приемной конструкцией 39.
Теперь с обращением к фиг. 4-7 будут описаны другой вариант осуществления системы 110 для причаливания согласно изобретению и в то же время способ причаливания, реализуемый в этой системе.
Система 110 для причаливания предназначена для осуществления причаливания аэростата 200 к приемной конструкции 300, такой как причальная мачта, показанная на фиг. 1. Эта приемная конструкция 300 содержит изогнутую часть 130, снабженную зацепляющим устройством 310, например деталью в виде крюка, предназначенным для приема согнутого в петлю конца 120 причального троса 11, и может перемещаться главным образом в плоскости 4. Для примера она может быть помещена на платформу грузового автомобиля или может иметь приводной блок.
Система 110 для причаливания содержит беспилотный летательный аппарат 10, например квадрокоптер, несущий образующий петлю 120 свободный конец причального троса 11, другой конец которого намотан на барабан 210 лебедки на борту аэростата 200, который приводится в движение двигателем 222. Беспилотный летательный аппарат 10 предназначен для расположения в аэростате 200, в корпусе 220, который может быть закрыт крышкой или аналогичным устройством (непоказанным).
Когда аэростат 200 находится на подходе к приемной конструкции 300 под управлением векторных подруливающих двигателей 122, 123, только два из которых показаны на фиг. 4, которые расположены на каждой стороне фюзеляжа аэростата 200, с рабочего места пилота этого аэростата осуществляется управление полетом беспилотного летательного аппарата 10, который в таком случае выходит из корпуса 220 и переносит первый конец 120 причального троса 11. Осуществляется управление этим беспилотным летательным аппаратом 10 на пути к цели, образованной зацепляющим устройством 310, расположенным на верхней части приемной конструкции 300. Кроме того, может быть предусмотрена работа беспилотного летательного аппарата 10 в автономном режиме при движении между аэростатом 200 и зацепляющим устройством 310 приемной конструкции 300.
Беспилотный летательный аппарат 10, показанный на фиг. 5 и 6, содержит четыре ротора 101-104 и управляемое блокировочное устройство 100 конца 120 причального троса 11. Когда беспилотный летательный аппарат 10 управляется на траектории сближения, лебедка 210 переводится в положение свободного хода, так что трос может сматываться без сопротивления, чтобы перемещение беспилотного летательного аппарата 10 не ограничивалось.
Когда беспилотный летательный аппарат 10 достигает цели, он после этого управляется для осуществления вставления петли, выполняющей функцию конца 120, в зацепляющее устройство 310. После доведения до конца операции вставления на беспилотный летательный аппарат 10 подается команда на отход от устройства 100 и поэтому на освобождение причального троса 11. Как показано на фиг. 6, после этого беспилотный летательный аппарат 10 может покинуть зону причаливания и возвратиться в предназначенный для него корпус 220 для зарядки электрической энергией или отправиться в приемную зону на грунте, отведенную для этого беспилотного летательного аппарата. После этого приводной двигатель 222 барабана 210 лебедки осуществляет управление для наматывания троса 11, чтобы приводить аэростат 200 ближе к приемной конструкции 300 до тех пор, пока носовая часть 224 аэростата 200 не будет находиться по существу в контакте с изогнутой частью 130 приемной конструкции 300, как это показано на фиг. 7.
Что касается фиг. 8, то приемная конструкция 3', предназначенная для приема аэростата 2', имеет конфигурацию салазок на снабженной двигателем раме, способной перемещаться по грунту 4 и останавливаться. Аэростат 2', имеющий векторные подруливающие двигатели 22', 23', снабжен системой 1' для причаливания, содержащей несколько беспилотных летальных аппаратов 10.1, 10.2, 10.3, расположенных в корпусах 20.1, 20.2, 20.3 и предназначенных для достижения зацепляющих устройств 31.1, 31.2, 31.3, расположенных на верхней части приемной конструкции 3'.
Что касается фиг. 9-11, то также можно иметь другую конфигурацию, в которой система 1ʺ для причаливания содержит по меньшей мере один беспилотный летательный аппарат 16, прикрепленный к снабженной двигателем приемной конструкции 6, расположенной на грунте или дороге 4, и приспособленный для переноса причального троса 111 к аэростату 2ʺ, находящемуся на подходе к приемной конструкции 6, снабженной изогнутым устройством 60, предназначенным для приема носовой части аэростата 2ʺ. Эта приемная конструкция может быть снабжена корпусом (непоказанным) для приема беспилотного летательного аппарата 16 и лебедкой 61 с двигателем, регулирующей сматывание или наматывание причального троса 110.
Когда беспилотный летательный аппарат 16 достигает носовой части аэростата 2ʺ, который снабжен зацепляющим устройством 25, схематично показанным на фиг. 9, и когда снабженная двигателем лебедка 61 управляется для обеспечения сматывания троса 111, то этом случае осуществляется управление для вставления концевой петли 112 причального троса 111 в зацепляющее устройство 25, после чего, как показано на фиг. 10, он освобождается от троса 111 и выходит из зоны причаливания. После этого беспилотный летательный аппарат 16 может возвратиться на базу в или на приемной конструкции 6 или может управляться для осуществления возврата в предназначенную для него приемную зону, чтобы выполнить зарядку электрической энергией.
После прикрепления причального троса 111 к зацепляющему устройству 25 аэростата 2ʺ осуществляется управление снабженной двигателем лебедкой 61 для наматывания троса 111 и тем самым для перемещения аэростата 2ʺ ближе к приемной конструкции 6, которая сохраняется неподвижной относительно грунта 4 или как вариант может перемещаться под контролем для облегчения соединения аэростата 2ʺ с приемной конструкцией. Управление намоткой троса 111 прекращается, когда носовая часть аэростата 2ʺ по существу входит в контакт с изогнутым приемным устройством 60, как это показано на фиг. 11.
Понятно, что все системы для причаливания (или часть их), описанные выше с обращением к упомянутым чертежам, могут использоваться совместно.
Конечно, различные признаки, формы, варианты и осуществления изобретения могут быть объединены в различных сочетаниях в тех случаях, когда они не являются несовместимыми или взаимоисключающими. В частности, могут быть объединены все варианты и осуществления, описанные выше.
Изобретение относится к привязным аэростатам и приемным конструкциям. Система (1) для причаливания аэростата (2) к приемной конструкции (3) содержит беспилотный летательный аппарат (10), управляемый для перемещения между аэростатом (2) и приемной конструкцией (3). Беспилотный летательный аппарат (10) выполнен с возможностью переноса первого конца (13) троса (11), который имеет второй конец, прикрепленный к аэростату (2) или к приемной конструкции (3). При этом беспилотный летательный аппарат (10) выполнен также с возможностью прикрепления первого конца (13) к приемной конструкции (3) или к аэростату (2). Достигается более легкое и более безопасное причаливание в реальных условиях. 4 н. и 16 з.п. ф-лы, 11 ил.
1. Система (1, 110, 1', 1ʺ) для причаливания аэростата (2, 200, 2', 2ʺ) к приемной конструкции (3, 300, 3', 6), отличающаяся тем, что она содержит по меньшей мере один беспилотный летательный аппарат (10, 10.1, 10.2, 10.3, 16), которым можно управлять для перемещения между аэростатом (2, 200, 2', 2ʺ) и приемной конструкцией (3, 300, 39, 3', 6) при переносе первого конца (12) причального троса (11, 111), второй конец которого прикреплен к аэростату (2, 200, 2', 2ʺ) или к приемной конструкции (3, 300, 39, 3', 6), и для прикрепления первого конца (12) к приемной конструкции (3, 300, 39, 3', 6) или к аэростату (2, 200, 2', 2ʺ), чтобы указанный трос (11, 111) соединял аэростат (2, 200, 2', 2ʺ) с приемной конструкцией (3, 300, 39, 3', 6).
2. Система (1, 110, 1', 1ʺ) для причаливания по п. 1, отличающаяся тем, что она также содержит средство (20, 21, 31, 61) для наматывания троса (11, 111), соединяющего аэростат (2, 200, 2', 2ʺ) с приемной конструкцией (3, 300, 39, 3', 6), с тем, чтобы приводить аэростат (2, 2', 2ʺ) ближе к приемной конструкции (3, 300, 39, 3', 6).
3. Система (1, 110, 1') для причаливания по п. 2, отличающаяся тем, что намоточное средство содержит намоточное устройство (21, 210), расположенное в аэростате (2, 200, 2').
4. Система (1, 110, 1ʺ) для причаливания по любому одному из предшествующих пунктов, отличающаяся тем, что намоточное средство содержит намоточное устройство (31, 61), расположенное на приемной конструкции (3, 39, 6).
5. Система (1) для причаливания по п. 4, отличающаяся тем, что намоточное устройство (31) содержит снабженную двигателем лебедку, имеющую по существу вертикальную ось вращения, расположенную на верхней части приемной конструкции (3, 39).
6. Система (1) для причаливания по п. 5, отличающаяся тем, что снабженная двигателем лебедка содержит барабан (31), снабженный пазом (33), предназначенным для приема конца причального троса (11).
7. Система (1, 110, 1', 1ʺ) для причаливания по любому одному из предшествующих пунктов, отличающаяся тем, что она приспособлена для высвобождения беспилотного летательного аппарата (10, 10.1, 10.2, 10.3, 16) после прикрепления первого конца (12, 13, 120) троса (11, 111) к приемной конструкции (3, 39, 6) или к аэростату (2, 200, 2', 2ʺ).
8. Система (1, 1') для причаливания по любому одному из предшествующих пунктов, в которой беспилотный летательный аппарат (10, 10.1, 10.2, 10.3) выполнен так, что он может быть расположен в аэростате (2, 200, 2'), указанный беспилотный летательный аппарат выполнен управляемым для (i) переноса к приемной конструкции (3, 39, 300, 3') первого конца (12, 13) причального троса (11), второй конец которого прикреплен к аэростату (2, 200, 2'), и (ii) прикрепления первого конца (12, 13) к приемной конструкции (3, 39, 300, 3').
9. Система (1ʺ) для причаливания по любому одному из пп. 1-7, в которой беспилотный летательный аппарат (16) выполнен с возможностью взлета с приемной конструкции (6), указанный беспилотный летательный аппарат (16) выполнен управляемым для (i) переноса к аэростату (2ʺ) первого конца (112) причального троса (110), второй конец которого прикреплен к приемной конструкции (6), и (ii) прикрепления первого конца (112) к аэростату (2ʺ).
10. Система (1) для причаливания по любому одному из предшествующих пунктов, отличающаяся тем, что причальный трос (11) содержит множество последовательных отрезков (11.1, 11.2, 11.3) с последовательно возрастающими диаметрами, при этом первый (11.1) из отрезков имеет наименьший диаметр и заканчивается первым концом (13), предназначенным для переноса беспилотным летательным аппаратом (10).
11. Система для причаливания по любому одному из предшествующих пунктов и п. 4, отличающаяся тем, что намоточное устройство (31), расположенное в приемной конструкции (3), соединено с механической соединительной системой (40, 41), содержащей первый механический соединитель (40), расположенный в носовой части аэростата (2), и второй механический соединитель (41), расположенный на верхней части приемной конструкции (39), при этом первый и второй механические соединители (40, 41) предназначены для механического соединения на конце намоточной последовательности причального троса (11).
12. Способ причаливания аэростата (2, 200, 2', 2ʺ) к приемной конструкции (3, 300, 39, 3', 6), реализуемый в системе (1, 110, 1', 1ʺ) для причаливания по любому одному из предшествующих пунктов, содержащий этапы, на которых:
управляют по меньшей мере одним беспилотным летательным аппаратом (10, 10.1, 10.2, 10.3, 16), несущим первый конец (12, 13, 112) причального троса (11, 110), второй конец которого прикреплен к аэростату (2, 200, 2', 2ʺ) или к приемной конструкции (3, 300, 39, 3', 6), на всем протяжении пути, ведущего к приемной конструкции (3, 300, 3', 6) или аэростату (2, 200, 2', 2ʺ), и
прикрепляют первый конец (12, 13, 112) причального троса (11, 110) к части приемной конструкции (3, 300, 39, 3', 6) или аэростату (2, 200, 2', 2ʺ).
13. Способ причаливания по п. 12, отличающийся тем, что он также содержит этап наматывания причального троса (11, 111) после прикрепления первого конца (12, 13, 112) его к приемной конструкции (3, 300, 39, 3', 6) или к аэростату (2, 200, 2', 2ʺ) до тех пор, пока часть аэростата (2, 200, 2', 2ʺ), по существу, не достигнет части приемной конструкции (3, 300, 39, 3', 3ʺ).
14. Способ по п. 13, реализуемый в системе для причаливания по п. 11, отличающийся тем, что этап наматывания причального троса (11) осуществляют до получения соединения первого и второго механических соединителей (40, 41).
15. Способ причаливания по любому одному из пп. 12-14, отличающийся тем, что он также содержит этап высвобождения беспилотного летательного аппарата (10, 10.1, 10.2, 10.3, 16) при сохранении прикрепления первого конца (12, 112) троса (11, 110) к приемной конструкции (3, 3', 6).
16. Способ причаливания по любому одному из пп. 12-15, отличающийся тем, что управление последовательными этапами по меньшей мере частично осуществляется с аэростата (2, 200, 2', 2ʺ).
17. Способ причаливания по любому одному из пп. 12-16, отличающийся тем, что управление последовательными этапами по меньшей мере частично осуществляется с земли.
18. Способ причаливания по любому одному из пп. 12-17, отличающийся тем, что беспилотный летательный аппарат (10, 10.1, 10.2, 10.3, 16) программируют для достижения приемной конструкции (3, 300, 39, 3', 6) автономно с аэростата (2, 200, 2', 2ʺ) или аэростата (2, 200, 2', 2ʺ) с приемной конструкции (3, 300, 39, 3', 6).
19. Аэростат (2, 200, 2', 2ʺ), снабженный системой (1, 110, 1', 1ʺ) для причаливания по любому одному из пп. 1-11.
20. Конструкция (3, 300, 3', 6), предназначенная для приема аэростата (2, 200, 2', 2ʺ), снабженного системой (1, 110, 1', 1ʺ) для причаливания по любому одному из пп. 1-11.
| Печь с мелкодисперсным теплоносителем | 1975 |
|
SU548638A1 |
| US 2016309346 A1, 20.10.2016 | |||
| Способ управления привязным аэростатом естественной формы и стратосферный привязной аэростат естественной формы | 1991 |
|
SU1830352A1 |

