Область техники, к которой относится изобретение
Изобретение относится к области военной технике и может быть использовано для уничтожения боевой техники и живой силы противника.
Уровень техники
Известен способ стрельбы из пушки, где для придания ускорения снаряду используется пороховой заряд.
Недостатком способа является невысокая дальность полета снаряда, которая, как правило, не превышает нескольких десятков километров.
Известен способ запуска боевой ракеты из подводного положения, где для выведения ракеты на траекторию полета требуется стартовый стол, ускоритель и маршевый двигатель.
Недостатками способы является необходимость использования стартового ускорителя (как правило, порохового), полет ракеты к цели происходит по кратчайшей траектории, размещение пускового устройства осуществляется на расстоянии, при котором подлетное время к цели превышает 10 мин.
Данное техническое решение выбрано в качестве прототипа.
Раскрытие изобретения
Техническим результатом является сокращение материальных затрат на изготовление пускового устройства с боевой ракетой, сокращение подлетного времени боевой ракеты к цели, создание условий максимально затрудняющих обнаружение местонахождения пускового устройства с боевой ракетой.
Пусковое устройство запуска боевой ракеты (ПУБР) из подводного положения имеет устройство запуска (УЗ), соединенное с боевой ракетой (БР), отличающееся тем, что УЗ оснащено ЭВМ, приемником ГЛОНАСС, рулевым управлением и рулем, электродвигателем и гребным винтом, радиостанцией, антеннами для радиостанции и приемника ГЛОНАСС, аккумулятором, устройством изменения горизонта и удержания ПУБР в горизонтальном положении, подъемником, соединенным гибкой связью с корпусом, механическими и электрическими связями между приборами;
подъемник для подъема БР на поверхность океана имеет резиновый шар, который наполняется воздухом при подъеме БР, крюк, сцепленный со скобой БР, слабое место на гибкой тяге, в котором обрывается тяга при ее натяжении, корпус крана сжатого воздуха, ось крана сжатого воздуха, флажок крана сжатого воздуха, резервуар со сжатым воздухом, патрубки для пропуска сжатого воздуха, клапан для выпуска воздуха из резинового шара, если давление воздуха внутри шара превышает давление окружающей шар воды;
БР имеет антенну ГЛОНАСС, экран, защищающий антенну приемника ГЛОНАСС от влияния окружающей среды и пропускающий электромагнитные волны от спутников ГЛОНАСС, приемник ГЛОНАСС, рулевое управление, маршевый двигатель, устройство управления, память, контроллер, аккумулятор, электрические связи между приборами;
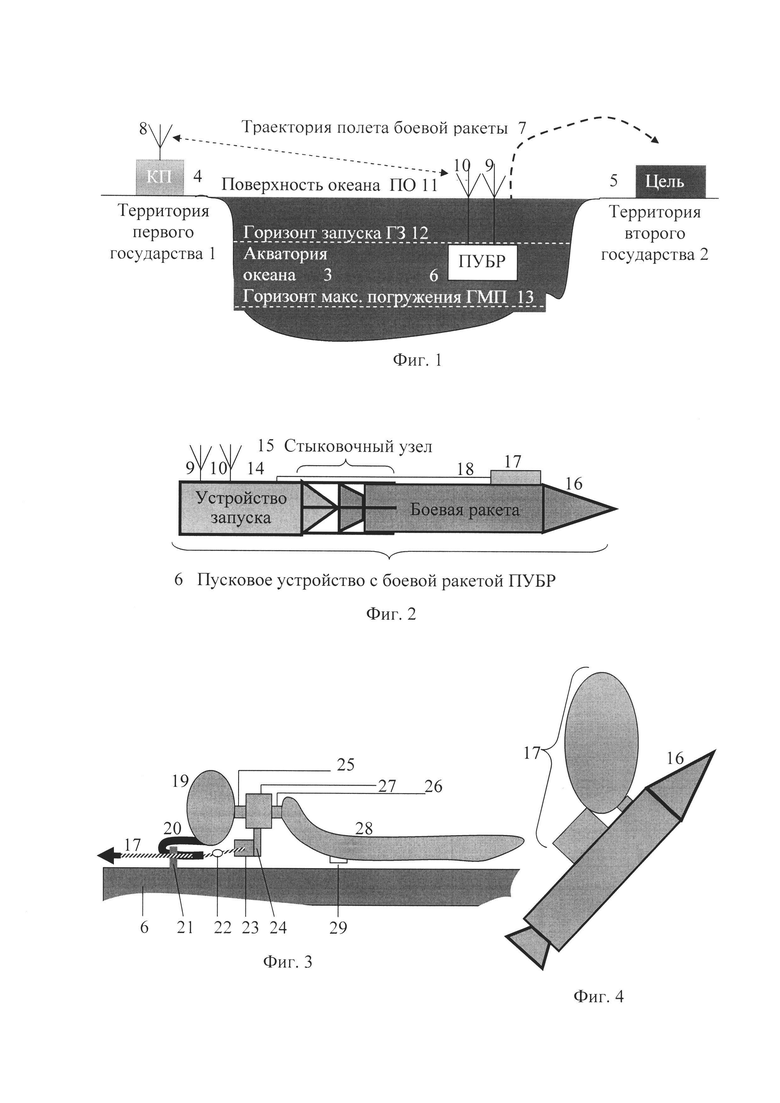
в рабочем положении ПУБР находится ниже горизонта запуска (100 м ниже уровня океана) и выше горизонта максимального погружения (300 м ниже уровня океана) и непрерывно перемещается по траектории, параметры, которой записаны в памяти ЭВМ, при осуществлении связи между командным пунктом и УЗ ПУБР поднимается на 10 м выше горизонта запуска для выдвижения антенн выше уровня океана, в этом случае осуществляется прием информации с командного пункта КП и определение местонахождения ПУБР с участием ГЛОНАСС;
с командного пункта передается информация о месте и времени старта БР, траектории ее полета к цели, информация на командный пункт с УЗ поступает в строго отведенные моменты времени или по запросу с командного пункта о местонахождении ПУБР и другая техническая информация;
последовательность действия приборов УЗ при получении сигнала на старт происходит следующим образом: сигнал с участием антенны и радиостанции БР поступает в ЭВМ, приемник ГЛОНАСС с участием антенны определяет координаты ПУБР и передает их на ЭВМ, которая осуществляет управление перемещением ПУБР с помощью электродвигателя и гребного винта, рулевого управления и руля, при перемещении ПУБР устройство изменения горизонта и поддержания горизонтального положения ПУБР удерживается в ее горизонтальном положении;
после получения команды на запуск ПУБР направляется к месту старта, из ЭВМ в память БР передается информация о траектории полета БР, в назначенное время старта УЗ резко перемещается назад, при этом УЗ и БР расстыковываются, натягивается гибкая тяга и рвется в слабом месте, благодаря чему срабатывает подъемник, БР устремляется вверх, при выбросе БР в воздушную среду включается маршевый двигатель и БР под управлением контроллера КН летит к цели Ц;
после нанесения удара БР по цели по информации, введенной в память ЭВМ, УЗ отводится в заданную точку акватории океана для зарядки аккумуляторов, оснащения новой БР, ремонта;
во время проведения всех передвижений питание приборов УЗ и БР осуществляется от встроенных аккумуляторов.
Описание чертежей
На фиг. 1 представлена структурная схема расположения объектов; на фиг. 2 - устройство запуска боевой ракеты с боевой ракетой; на фиг. 3 - подъемник в положении до старта; на фиг. 4 - подъемник в положении после старта, на фиг. 5 - структурная схема механических и электрических связей между приборами устройство запуска и боевой ракеты.
Условные обозначения:
1 - территория первого государства;
2 - территория второго государства;
3 - акватория океана;
4 - командный пункт КП;
5 - цель Ц;
6 - пусковое устройство с боевой ракетой ПУБР;
7 - траектория полета боевой ракеты ТБР;
8 - антенна командного пункта АКП;
9 - антенна приемника ГЛОНАСС АПГЛ;
10 - антенна радиостанции АРС;
11 - поверхность океана ПО;
12 - горизонт запуска ГЗ;
13 - горизонт максимального погружения ГМП;
14 - устройство запуска УЗ;
15 - стыковочный узел СУ;
16 - боевая ракета БР;
17 - подъемник ПД;
18 - гибкая тяга ГТ;
19 - резервуар со сжатым воздухом РСВ;
20 - крюк КР;
21 - скоба СК;
22 - слабое место СМ;
23 - флажок крана выпуска сжатого воздуха ФК;
24 - ось крана выпуска сжатого воздуха ОК;
25 и 26 - патрубки для пропуска сжатого воздуха ПТ;
27 - корпус крана впуска сжатого воздуха ККСВ;
28 - резиновый шар РШ;
29 - клапан для выпуска воздуха КЛ;
30 - руль Р;
31 - гребной винт ГВ;
32 - рулевое управление РУ;
33 - приемник ГЛОНАСС ПГЛ;
34 - радиостанция PC;
35 - электродвигатель ЭД;
36 - электронно-вычислительная машина ЭВМ;
37 - аккумулятор АКК;
38 - устройство изменения горизонта и поддержания горизонтального положения УИГГ;
39 - механическая связь между Р и РУ;
40 - механическая связь между ГВ и ЭД;
41- электрическая связь (остальные связи электрические) между ЭД и ЭВМ;
42 - связь между ЭД и АКК;
43 - связь между РУ и АКК;
44 - связь между ПГЛ и ЭВМ;
45 - связь между ЭВМ и PC;
46 - связь между ЭВМ и УИГГ;
47 - связь между ЭВМ и ПБР;
48 - экран ЭК, защищающий антенну БР от влияния окружающей среды и протекающий электромагнитные волны от спутников ГЛОНАСС;
49 - приемник ГЛОНАСС БР ПРГБР;
50 - антенна приемника ГЛОНАСС АПРГБР;
51 - рулевое управление БР;
52 - маршевый двигатель МД;
53 - устройство управления БР УУБР;
54 - память БР ПБР;
55 - контроллер КН;
57 - связь между ПРГБР и КН;
58 - связь между МД и УУБР;
59 - связь между РУБР и УУБР;
60 - связь между ПБР и КН;
61 - связь между АККБР и ПРГБР, РУБР, МД, УУБР, ПБР, КН.
Осуществление изобретения
Цель Ц 5 (фиг. 1) на находится на территории второго государства 2. Устройство запуска УЗ 14 (фиг. 2) предназначено для транспортировки БР 16 в подводном положении, передачи информации в память БР 16 о траектории полета 7 и момента старта, перемещение УЗ 14 после запуска БР 16 в заданную точку акватории океана.
Подъемник ПД 17 (фиг. 3) предназначен для вывода БР 16 на поверхность океана 11.
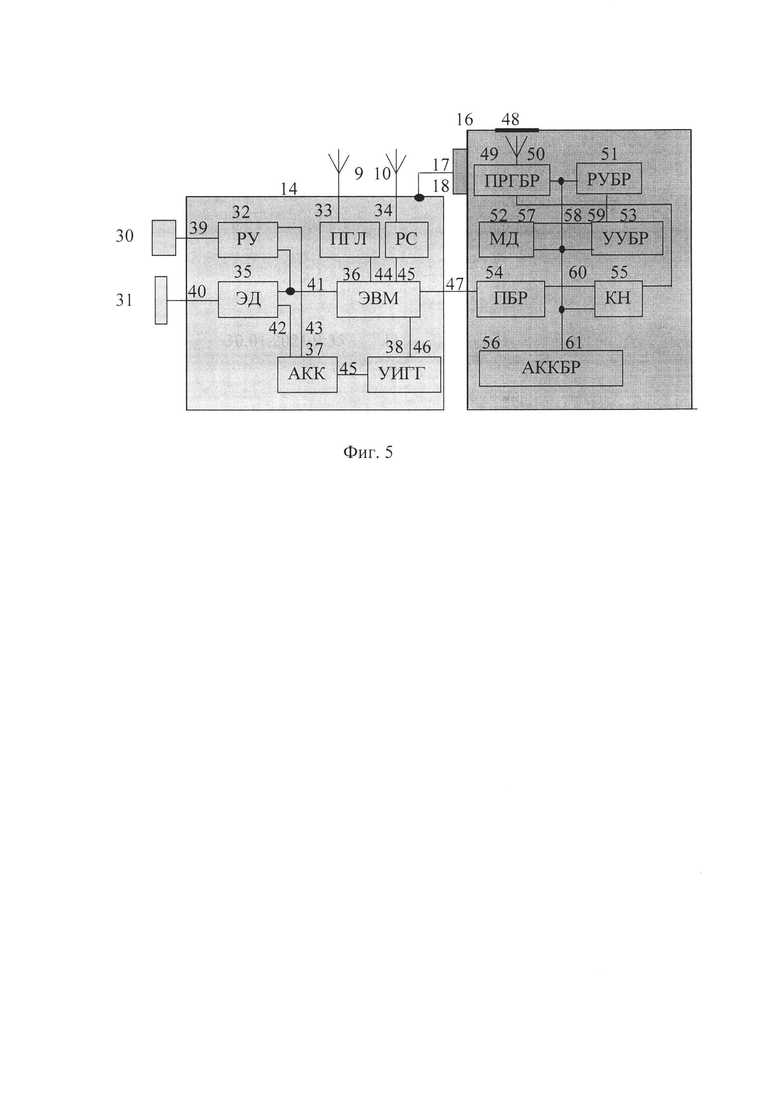
Пусковое устройство с боевой ракетой ПУБР 6 (совокупность устройства запуска УЗ 14, стыковочного узла 15, боевой ракеты БР 16, подъемника ПД 17) предназначено для запуска боевой ракеты БР 16 из подводного положения имеет устройство запуска (УЗ 14) соединенное с боевой ракетой (БР 16).
Устройство запуска УЗ 14 (фиг. 5) оснащено ЭВМ 36, приемником ГЛОНАСС ПГЛ 33, рулевым управлением РУ 32 и рулем Р 30, электродвигателем ЭД 35 и гребным винтом ГВ 31, радиостанцией PC 34, антеннами для радиостанции АРС 10 и приемника ГЛОНАСС АПГ 9, аккумулятором АКК 37, устройством изменения горизонта и удержания ПУБР 6 УИГГ 38 в горизонтальном положении, подъемником ПД 17 соединенным гибкой тягой ГТ 18 с корпусом устройства запуска УЗ 14, механическими и электрическими связями между приборами 39-46.
Подъемник ПД 17 (фиг. 3) предназначен для подъема БР 16 на поверхность океана ПО 11 имеет резиновый шар РШ 28, который наполняется воздухом при подъеме БР 16, крюк КР 20, сцепленный со скобой БР СК 21, слабое место на гибкой тяге СМ 22, в котором обрывается тяга при ее натяжении, корпус крана сжатого воздуха ККСВ 27, ось крана сжатого воздуха ОК 24, флажок крана сжатого воздуха ФК 23, резервуар со сжатым воздухом РСВ 19, патрубки для пропуска сжатого воздуха ПТ 25 и 26, клапан КЛ 29 для выпуска воздуха из шара, если давление воздуха внутри шара превышает давление окружающей шар воды.
Боевая ракета БР 16 имеет (фиг. 5) экран ЭК 48, защищающий антенну приемника ГЛОНАСС 50 от влияния окружающей среды и пропускающий электромагнитные волны со спутников ГЛОНАСС, приемник ГЛОНАСС ПРГБР 49, рулевое управление РУБР 51, маршевый двигатель МД 57, устройство управления УУБР 53, память ПБР 54, контроллер КН 55, аккумулятор АККБР 61, электрические связи между приборами 47-61.
В рабочем положении ПУБР 6 (фиг. 1) находится ниже горизонта запуска (100 м ниже уровня океана) и выше горизонта максимального погружения (300 м ниже уровня океана) и непрерывно перемещается по траектории, параметры, которой записаны в памяти ЭВМ 36, при осуществлении связи между командным пунктом КП 8, находящегося на территории 1, с помощью антенн АКП 8 и АРС 9, с участием или без участия ретрансляторов, ПУБР 6 для связи с командным пунктом КП поднимается на 10 м выше горизонта запуска для выдвижения антенн АРС 10 АПГЛ 9 над поверхностью океана 10, в этом случае осуществляется прием информации с командного пункта КП 4 и определение места нахождения ПУБР 6 с участием ГЛОНАСС.
С командного пункта КП 4 передается информация о месте и времени старта БР 6, траектории ее полета к цели 7, информация на командный пункт с УЗ 14 поступает в строго отведенные моменты времени или по запросу с командного пункта КП 4 о местонахождении ПУБР 6 и другая техническая информация.
Последовательность действия приборов УЗ 14 (фиг. 5) при получении сигнала на старт происходит следующим образом: сигнал с участием антенны АРС 10 и радиостанции PC 34 поступает в ЭВМ 36, приемник ГЛОНАСС ПГЛ 33 с участием антенны АРС 10 определяет координаты ПУБР 6 и передает их на ЭВМ 36, которая осуществляет управление перемещением ПУБР 6 с помощью электродвигателя ЭД 35 и гребного винта ГВ 31, рулевого управления РУ 32 и руля Р 30, при перемещении ПУБР 6 устройство изменения горизонта и поддержания горизонтального положения ПУБР УИГГ 38 удерживается в ее горизонтальном положении.
После получения команды на запуск ПУБР 6 направляется к месту старта, из ЭВМ 36 в память БР ПБР 54 передается информация о траектории 7 полета БР 16, в назначенное время старта УЗ 14 резко перемещается назад, при этом УЗ 14 и БР 16 расстыковываются, натягивается гибкая тяга ГТ 18 и рвется в слабом месте СМ 22, благодаря чему срабатывает подъемник ПД 17 (подъем БР 16 показан на фиг. 4), БР 16 устремляется вверх, при выбросе БР 6 в воздушную среду включается маршевый двигатель МД 52 (фиг. 5) и БР 16 под управлением контроллера КН 55 летит к цели Ц 5.
После нанесения удара по цели устройство запуска УЗ 14 по информации, введенной в память ЭВМ 36, отводится в заданную точку акватории океана для зарядки аккумуляторов, оснащения новой БР 16, ремонта.
Во время проведения всех передвижений питание приборов УЗ 14 и БР 16 осуществляется от встроенных аккумуляторов АКК и АККБР.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ПОЛЕТОМ БОЕВОЙ РАКЕТЫ | 2019 |
|
RU2748503C2 |
| СПОСОБ УПРАВЛЕНИЯ БЕСПИЛОТНОЙ ПОДВОДНОЙ ЛОДКОЙ И УСТРОЙСТВА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2020 |
|
RU2766639C1 |
| ПОДВОДНАЯ БЕСПИЛОТНАЯ РАКЕТНАЯ СИСТЕМА | 2019 |
|
RU2710039C1 |
| СПОСОБ ПОРАЖЕНИЯ ЛЕТЯЩЕГО ПЕРЕМЕННЫМ КУРСОМ И ВЫСОТОЙ ОБЪЕКТА | 2020 |
|
RU2741133C1 |
| Способ автоматического наведения орудия на цель | 2019 |
|
RU2728292C1 |
| СПОСОБ НАВЕДЕНИЯ НА ЦЕЛЬ РЕАКТИВНОЙ СИСТЕМЫ | 2020 |
|
RU2753940C1 |
| СПОСОБ НАВЕДЕНИЯ ОРУДИЯ НА ЦЕЛЬ | 2020 |
|
RU2743597C1 |
| СПОСОБ ПОРАЖЕНИЯ ПОДВИЖНЫХ ЦЕЛЕЙ | 2020 |
|
RU2746235C1 |
| Беспилотная боевая машина и система дистанционного управления движением и вооружением беспилотной боевой машиной | 2017 |
|
RU2671138C1 |
| СИСТЕМА ДИСТАНЦИОННОГО УПРАВЛЕНИЯ САМОЗАРЯДНОЙ ВИНТОВКОЙ | 2019 |
|
RU2723700C1 |
Пусковое устройство запуска боевой ракеты (ПУБР) из подводного положения содержит устройство запуска (УЗ), соединенное с боевой ракетой (БР). УЗ содержит ЭВМ, приемник ГЛОНАСС, рулевое управление, руль, электродвигатель, гребной винт, радиостанцию с антеннами и приемником ГЛОНАСС, аккумулятор, устройство изменения горизонта и удержания ПУБР в горизонтальном положении, подъемник, соединенный гибкой связью с корпусом и имеющий резиновый шар, который наполняется воздухом при подъеме БР, механические и электрические связи между приборами, крюк, сцепленный со скобой БР, слабое место на гибкой тяге, в котором обрывается тяга при ее натяжении, корпус крана сжатого воздуха, ось крана сжатого воздуха, флажок крана сжатого воздуха, резервуар со сжатым воздухом, патрубки для пропуска сжатого воздуха, клапан для выпуска воздуха из резинового шара, если давление воздуха внутри шара превышает давление окружающей шар воды. БР содержит антенну ГЛОНАСС, экран, защищающий антенну приемника ГЛОНАСС от влияния окружающей среды и пропускающий электромагнитные волны от спутников ГЛОНАСС, приемник ГЛОНАСС, рулевое управление, маршевый двигатель, устройство управления, память, контроллер, аккумулятор, электрические связи между приборами. Обеспечивается сокращение подлетного времени боевой ракеты к цели, создание условий максимально затрудняющих обнаружение местонахождения пускового устройства с боевой ракетой. 5 ил.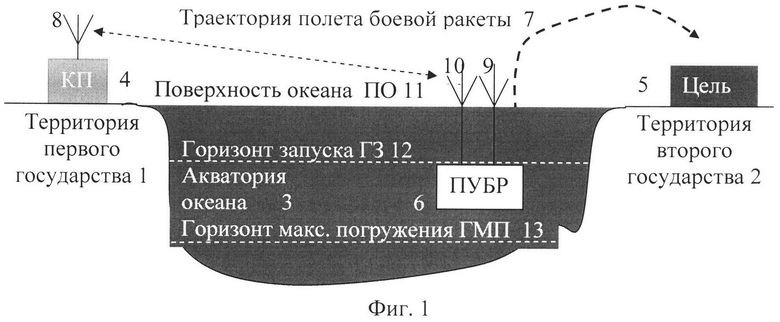
Пусковое устройство запуска боевой ракеты (ПУБР) из подводного положения имеет устройство запуска (УЗ), соединенное с боевой ракетой (БР), отличающееся тем, что УЗ оснащено ЭВМ, приемником ГЛОНАСС, рулевым управлением и рулем, электродвигателем и гребным винтом, радиостанцией, антеннами для радиостанции и приемника ГЛОНАСС, аккумулятором, устройством изменения горизонта и удержания ПУБР в горизонтальном положении, подъемником, соединенным гибкой связью с корпусом, механическими и электрическими связями между приборами;
подъемник для подъема БР на поверхность океана имеет резиновый шар, который наполняется воздухом при подъеме БР, крюк, сцепленный со скобой БР, слабое место на гибкой тяге, в котором обрывается тяга при ее натяжении, корпус крана сжатого воздуха, ось крана сжатого воздуха, флажок крана сжатого воздуха, резервуар со сжатым воздухом, патрубки для пропуска сжатого воздуха, клапан для выпуска воздуха из резинового шара, если давление воздуха внутри шара превышает давление окружающей шар воды;
БР имеет антенну ГЛОНАСС, экран, защищающий антенну приемника ГЛОНАСС от влияния окружающей среды и пропускающий электромагнитные волны от спутников ГЛОНАСС, приемник ГЛОНАСС, рулевое управление, маршевый двигатель, устройство управления, память, контроллер, аккумулятор, электрические связи между приборами;
в рабочем положении ПУБР находится ниже горизонта запуска и выше горизонта максимального погружения и непрерывно перемещается по траектории, параметры которой записаны в памяти ЭВМ, при осуществлении связи между командным пунктом и УЗ ПУБР поднимается на 10 м выше горизонта запуска для выдвижения антенн выше уровня океана, в этом случае осуществляется прием информации с командного пункта КП и определение местонахождения ПУБР с участием ГЛОНАСС;
с командного пункта передается информация о месте и времени старта БР, траектории ее полета к цели, информация на командный пункт с УЗ поступает в строго отведенные моменты времени или по запросу с командного пункта о местонахождении ПУБР и другая техническая информация;
последовательность действия приборов УЗ при получении сигнала на старт происходит следующим образом: сигнал с участием антенны и радиостанции БР поступает в ЭВМ, приемник ГЛОНАСС с участием антенны определяет координаты ПУБР и передает их на ЭВМ, которая осуществляет управление перемещением ПУБР с помощью электродвигателя и гребного винта, рулевого управления и руля, при перемещении ПУБР устройство изменения горизонта и поддержания горизонтального положения ПУБР удерживается в ее горизонтальном положении;
после получения команды на запуск ПУБР направляется к месту старта, из ЭВМ в память БР передается информация о траектории полета БР, в назначенное время старта УЗ резко перемещается назад, при этом УЗ и БР расстыковываются, натягивается гибкая тяга и рвется в слабом месте, благодаря чему срабатывает подъемник, БР устремляется вверх, при выбросе БР в воздушную среду включается маршевый двигатель и БР под управлением контроллера КН летит к цели Ц;
после нанесения удара БР по цели по информации, введенной в память ЭВМ, УЗ отводится в заданную точку акватории океана для зарядки аккумуляторов, оснащения новой БР, ремонта;
во время проведения всех передвижений питание приборов УЗ и БР осуществляется от встроенных аккумуляторов.
| КОМПЛЕКС ОРУЖИЯ ДЛЯ ПОРАЖЕНИЯ НАЗЕМНЫХ БЕРЕГОВЫХ ОБЪЕКТОВ И СПОСОБ ЕГО ПРИМЕНЕНИЯ С ПОДВОДНЫХ НОСИТЕЛЕЙ | 2015 |
|
RU2624258C2 |
| СПОСОБ БОЕВОГО ПРИМЕНЕНИЯ РАКЕТЫ | 2006 |
|
RU2325613C2 |
| СПОСОБ ТУШЕНИЯ ПОЖАРОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2530424C1 |
| CN 106959050 B, 27.11.2018 | |||
| СТРАХОВОЧНЫЙ ФАЛ ДЛЯ ТРОПОСФЕРНОГО ВЕТРОВОГО ГЕНЕРАТОРА | 2010 |
|
RU2530423C2 |
| СПОСОБ СКРЫТНОГО ПЕРЕМЕЩЕНИЯ ПОД ВОДОЙ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА И ВЫХОДА ЕГО НА СТАРТОВУЮ ПОЗИЦИЮ | 2015 |
|
RU2613632C2 |

