УРОВЕНЬ ТЕХНИКИ
[0001] Данное изобретение относится к конвейеру, такому как забойный скребковый конвейер («AFC») или консольный перегружатель («BSL»).
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0002] Сплошные системы горной разработки среди прочих вещей содержат конвейер, такой как AFC или BSL, для транспортировки выработанного материала (напр., угля) из области, где материал вырабатывается, в область для обработки (напр., дробления, хранения и т.д.). AFC, например, содержат первую звездочку и вторую звездочку, вокруг которых предоставлена цепь. Цепь приводится в движение одним или более исполнительными механизмами (напр., двигателем главного затвора, двигателем заднего затвора и т.д.), и движение цепи вокруг звездочек заставляет конвейер транспортировать выработанный материал.
[0003] Традиционные конвейеры ленточного типа подвержены проскальзыванию между барабанами/роликами и конвейерной лентой (напр., избыточная нагрузка может вызывать проскальзывание между металлическими или покрытыми резиной приводными барабанами/роликами и конвейерной лентой). Проскальзывание между роликами и конвейерной лентой препятствует тому, чтобы положение конкретных частей конвейерной ленты во время работы было точно известно, потому что положения могут постоянно изменяться на неизвестные величины. В дополнение к традиционному проскальзыванию в конвейерах ленточного типа может возникать еще один тип относительного недостатка, известного как ползучесть металла. Ползучесть металла вызывается изменениями определенной длины конвейерной ленты, когда поверхность ведущего барабана переносит на нее нагрузку. Ползучесть металла часто является постоянной для данной нагрузки, но все-таки с течением времени вызывает изменение относительного положения барабанов/роликов и конвейерной ленты. В результате проскальзывания, ползучести металла и других недостатков конвейеров ленточного типа, подобные конвейеры не подходят для использования в очистном забое при операции сплошной разработки и в других вариантах применения в горном деле с высокой нагрузкой.
[0004] С другой стороны, AFC или BSL имеет положительное, фиксированное взаимное расположение между звездочками конвейера и цепью конвейера. Положительное, фиксированное взаимное расположение между звездочками и цепью конвейера в AFC или BSL позволяет знать или определять положение любого из множества составных элементов или соединителей (напр., звеньев цепи, пластин и т.д.) во время работы конвейера. Таким образом, изобретение, описанное в данном документе, относится к конвейеру (напр., AFC, BSL и т.д.), который используется в горных работах и который содержит карту цепного узла или цепи в конвейере. Карта цепного узла или цепи в конвейере обеспечивает позиционную осведомленность по существу в реальном времени о любой точке цепного узла или цепи, а также множество функций, связанных с техническим обслуживанием, связанных со знанием положения цепного узла или цепи по существу в реальном времени.
[0005] В одном варианте осуществления изобретение предоставляет систему горной разработки, которая содержит конвейер и контроллер. Конвейер содержит первую звездочку и вторую звездочку, цепь, механизм привода и датчик. Цепь связана с первой звездочкой и второй звездочкой и содержит множество составных элементов цепи. Механизм привода соединен с первой звездочкой или второй звездочкой и выполнен с возможностью приведения в движение первой звездочки или второй звездочки. Датчик выполнен с возможностью генерирования сигнала, связанного с характеристикой конвейера. Контроллер выполнен с возможностью приема сигнала от датчика, определения количества составных элементов цепи, которые прошли базисную точку на основе сигнала, определения местоположения по меньшей мере одного из множества составных элементов цепи на основе количества составных элементов цепи, которые прошли базисную точку, и обновления карты цепи на основе местоположения по меньшей мере одного из множества составных элементов цепи.
[0006] В еще одном варианте осуществления изобретение предоставляет способ определения местоположения составного элемента цепи в конвейере системы горной разработки. Способ включает получение, в процессоре, сигнала от датчика, связанного с характеристикой конвейера, определение, используя процессор, количества составных элементов цепи, которые прошли базисную точку на основе сигнала, определение, используя процессор, местоположения составного элемента цепи на основе количества составных элементов цепи, которые прошли базисную точку, и обновление, используя процессор, карты цепи на основе местоположения составного элемента цепи.
[0007] В еще одном варианте осуществления изобретение предоставляет контроллер, содержащий процессор и память. Контроллер содержит выполняемые команды, хранящиеся в памяти, для получения, в процессоре, сигнала от датчика связанного с характеристикой конвейера, определения на основе сигнала, используя процессор, количества составных элементов цепи, которые прошли базисную точку конвейера, определения, используя процессор, местоположения составного элемента цепи на основе количества составных элементов цепи, которые прошли базисную точку конвейера, и обновления, используя процессор, карты цепи, хранящейся в памяти, на основе местоположения составного элемента цепи.
[0008] Перед подробным объяснением каких-либо вариантов осуществления изобретения должно быть понятно, что применение изобретения не ограничено деталями конфигурации и расположения составных элементов, изложенными в следующем описании или проиллюстрированными на сопровождающих чертежах. Изобретение допускает другие варианты осуществления и реализацию на практике или выполнение различными путями. Также, должно быть понятно, что фразеология и терминология, используемые в данном документе, предназначены для целей описания и не должны истолковываться в качестве ограничения. Подразумевается, что использование в данном документе «включающий», «содержащий» или «имеющий» и их вариантов охватывает пункты, перечисленные после, и их эквиваленты, а также дополнительные пункты. Если не оговорено или не ограничено иным образом, термины «установленный», «связанный», «поддержанный», и «соединенный» и их варианты используются широко и охватывают как прямые, так и непрямые крепления, связи, опоры и соединения.
[0009] В дополнение, должно быть понятно, что варианты осуществления изобретения могут включать аппаратное обеспечение, программное обеспечение и электронные составные элементы или модули, которые, для целей обсуждения, могут быть проиллюстрированы и описаны, как если бы большинство составных элементов были реализованы исключительно в виде аппаратного обеспечения. Однако, рядовой специалист в данной области, и на основе чтения данного подробного описания поймет, что по меньшей мере в одном варианте осуществления основанном на электронных средствах аспекты изобретения могут быть реализованы в виде программного обеспечения (напр., храниться на энергонезависимом машиночитаемом носителе), выполняемого одним или более блоками обработки, такими как микропроцессор и/или заказные специализированные интегральные схемы («ASIC»). В связи с этим, необходимо заметить, что для осуществления изобретения может быть использовано множество устройств на основе аппаратного обеспечения и программного обеспечения, а также множество различных структурных составных элементов. Например, «серверы» и «вычислительные устройства», описанные в описании, могут включать один или более блоков обработки, один или более модулей машиночитаемых носителей, один или более входных/выходных интерфейсов и различные соединения (напр., системную шину), соединяющую составные элементы.
[0010] Независимые аспекты изобретения станут понятны при рассмотрении подробного описания и сопровождающих чертежей.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
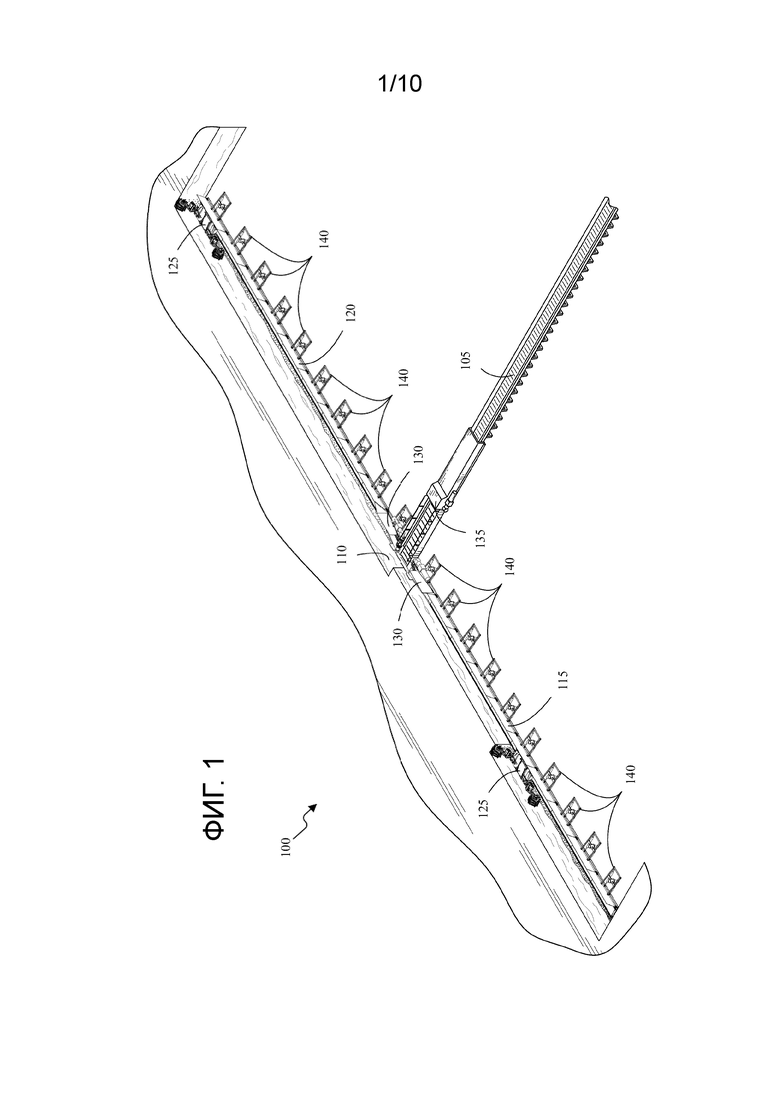
[0011] Фиг. 1 представляет собой перспективное изображение сплошные системы горной разработки.
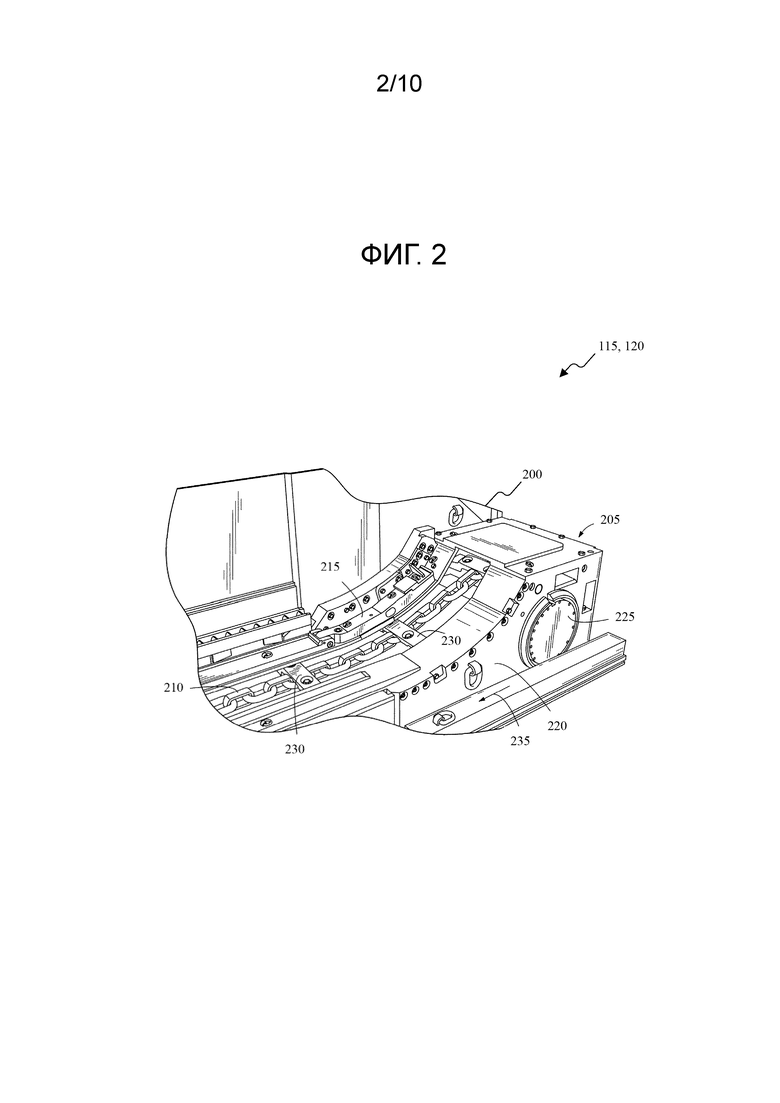
[0012] Фиг. 2 иллюстрирует часть цепного конвейера, содержащего концевую раму.
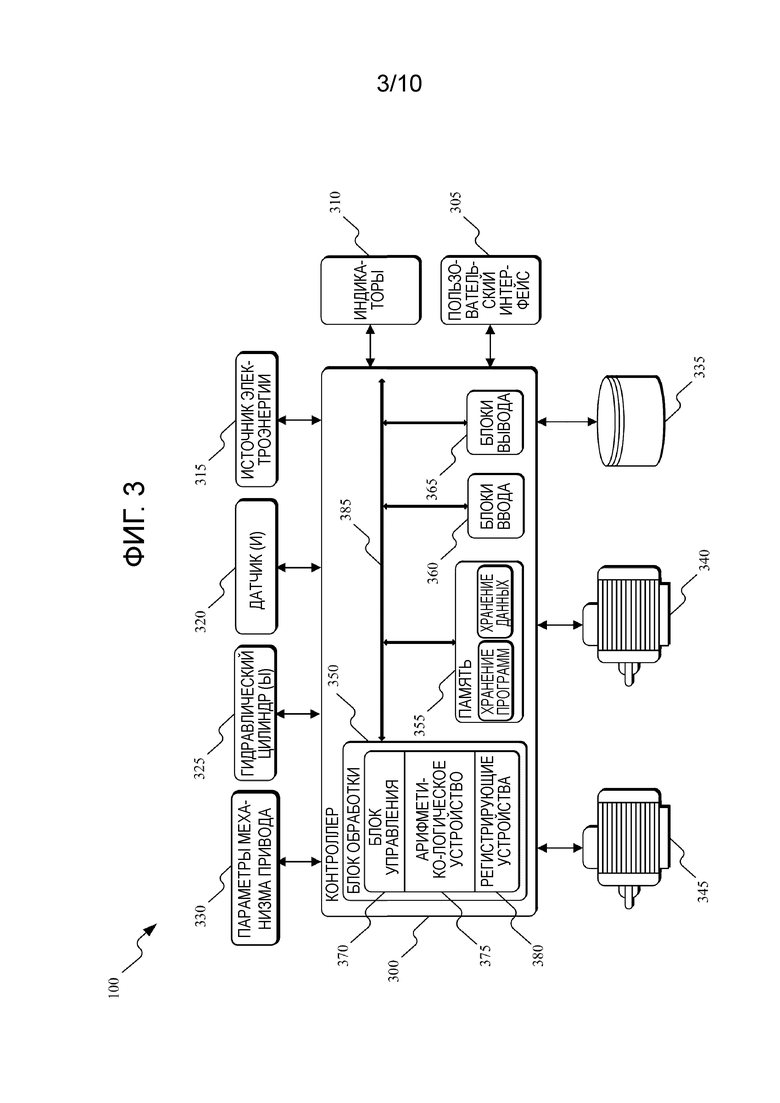
[0013] Фиг. 3 иллюстрирует контроллер для цепного конвейера согласно варианту осуществления изобретения.
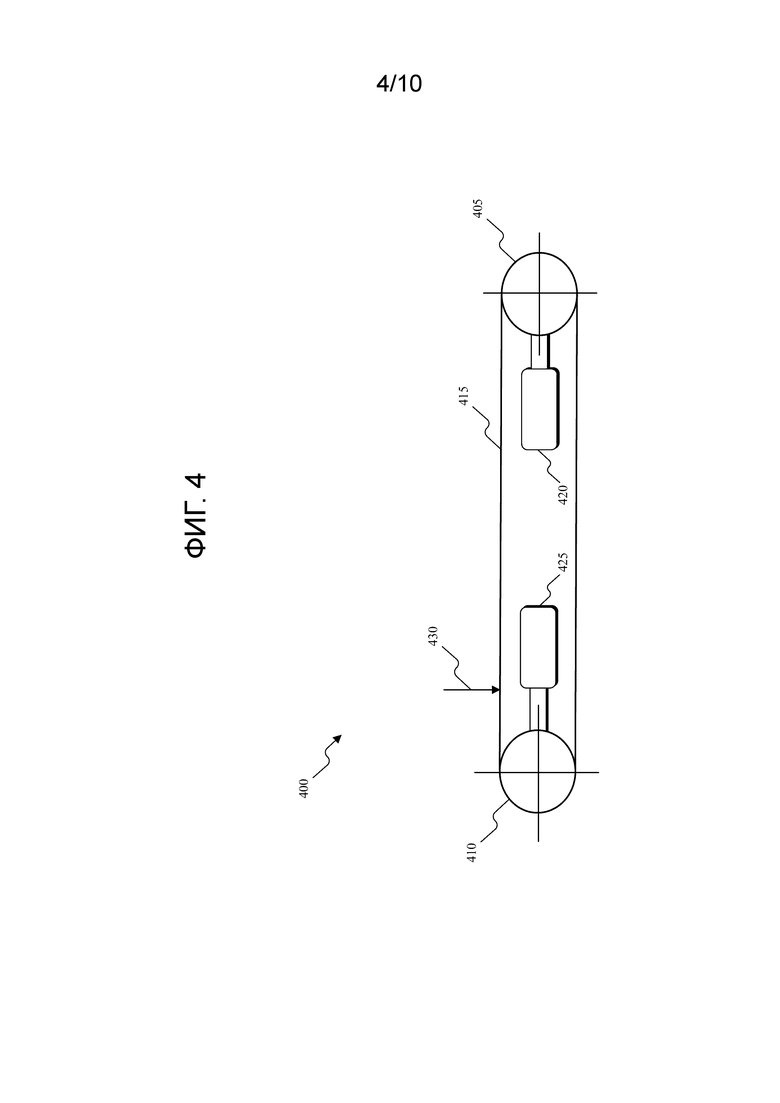
[0014] Фиг. 4 представляет собой схему, иллюстрирующую обобщенный конвейер и базисную точку конвейера.
[0015] Фиг. 5 представляет собой способ создания карты конвейерной цепи согласно варианту осуществления изобретения.
[0016] Фигуры 6, 7, 8 и 9 иллюстрируют пользовательские интерфейсы для мониторинга и/или обновления карты конвейерной цепи согласно вариантам осуществления изобретения.
[0017] Фиг. 10 представляет собой способ обновления карты цепи согласно варианту осуществления изобретения.
ПОДРОБНОЕ ОПИСАНИЕ
[0018] Изобретение, описанное в данном документе, относится к промышленной машине, такой как забойный скребковый конвейер («AFC»), консольный перегружатель («BSL») или другой аналогичный конвейер, который может быть использован в месте горных работ для транспортировки выработанного материала из очистного забоя. Конвейер содержит, среди прочих вещей, цепь, звездочку, механизм привода и контроллер. Для конвейера установлена базисная или контрольная точка, от которой может определяться или рассчитываться местоположение для каждого составного элемента или звена цепи. Для определения количества составных элементов или звеньев цепи, которые прошли базисную точку, используется выходной сигнал от датчика (напр., тахометра вала ротора). После того, как количество составных элементов или звеньев цепи, которые прошли базисную точку, было определено, определяется или рассчитывается местоположение каждого составного элемента или звена. Контроллер генерирует и отображает карту цепи или конвейера на основе местоположения каждого составного элемента или звена цепи. Карта цепи может обновляться вручную или автоматически дополнительной информацией, связанной с работой, производительностью, техническим обслуживанием, состоянием и историей цепи. Карта цепи также может использоваться для выполнения технического обслуживания цепи посредством расположения интересующего составного элемента или звена цепи в базисной точке для ремонта, замены и т.д. Карта цепи обеспечивает графическое представление цепи, множества цепей, шахты и т.д., чтобы при необходимости обеспечивать оператору возможность легко локализовывать, отслеживать и обновлять конкретные части карты. Для целей описания изобретение описано в данном документе относительно вариантов осуществления изобретения, которые содержат AFC.
[0019] Фиг. 1 иллюстрирует сплошную систему 100 горной разработки. Система 100 горной разработки содержит разгрузочный конвейер 105, продолжающийся из очистного забоя 110. Вдоль очистного забоя 110 продолжаются два конвейера 115 и 120. На конвейерах 115 и 120 установлены очистные комбайны 125 для сплошной системы горной разработки для продвижения в боковом направлении по существу параллельно очистному забою 110. Конвейеры 115 и 120 содержат приводную станцию, образующую разгрузочную часть 130, расположенную рядом с разгрузочным конвейером 105. Разгрузочный конвейер 105 содержит дробилку 135 для уменьшения размера выработанного материала для дальнейшей обработки и хранения. Устройства 140 поступательного перемещения конвейеров выполнены с возможностью передвижения конвейеров 115 и 120 в направлении очистного забоя 110. В некоторых вариантах осуществления сплошная система 100 горной разработки используется в подземных горных работах и дополнительно содержит множество элементов механизированной крепи (не показано).
[0020] Фиг. 2 иллюстрирует часть конвейера 200 для сплошной системы горной разработки, аналогичного конвейерам 115, 120 фиг. 1. Конвейер 200 содержит концевую станцию 205, перемещающую элемент или цепь 210, которая движется между концевой станцией 205 и разгрузочной частью 130 (см. Фиг. 1), и сенсорный узел 215 непосредственно на концевой станции 205. Цепь 210 приводится в движение механизмом привода, таким как двигатель с регулируемой частотой вращения, связанным с разгрузочной частью 130. Концевая станция 205 содержит раму 220, звездочку или приемный вал 225, установленный на раме 220, и по меньшей мере один гидравлический цилиндр (не показано). Рама 220 передвигается относительно разгрузочной части 130 на основании выдвижения и втягивания гидравлического цилиндра. Цепь 210 проходит вокруг приемного вала 225, передвигаясь в виде непрерывной петли между разгрузочной частью 130 и концевой станцией 205. Цепь 210 содержит множество скребковых элементов или планок 230, установленных на цепи 210 и разделенных первым расстоянием в направлении движения 235 цепи 210.
[0021] Фиг. 3 иллюстрирует контроллер 300, связанный с конвейером 115, 120, 200 и/или системой 100 горной разработки. Контроллер 300 связан или соединен с множеством дополнительных модулей или составных элементов, таких как модуль 305 пользовательского интерфейса, один или более индикаторов 310, модуль 315 электропитания, один или более датчиков 320, один или более гидравлических цилиндров 325, механизм привода или модуль 330 параметров двигателя, хранилище данных или база 335 данных, первый механизм привода и привод 340 (напр., связанный с главным затвором), и второй механизм привода и привод 345 (напр., связанным с задним затвором). В некоторых вариантах осуществления первый механизм привода и привод 340 содержит первый двигатель и привод первого двигателя, и второй механизм привода и привод 345 содержит второй двигатель и привод второго двигателя. В некоторых вариантах осуществления каждый из первого двигателя и привода 340 первого двигателя и второго двигателя и привода 345 второго двигателя содержат узлы распределительных устройств. Двигателями являются, например, двигатели с регулируемой частотой вращения, а приводами двигателей, например, являются приводы двигателей с регулируемой частотой вращения. Варианты осуществления изобретения, описанные в данном документе, описаны относительно механизмов привода и приводов, представляющих собой двигатели и приводы двигателей. Одним или более датчиками 320 являются, например, тахометры, выполненные с возможностью измерения или определения характеристики первого двигателя, второго двигателя, первой звездочки или второй звездочки (напр., угловое положение, скорость вращения, ускорение вращения, угловое смещение и т.д.), датчики приближения, выполненные с возможностью измерения или определения характеристики цепи (напр., положения цепи, скорости цепи, ускорения цепи и т.д.), датчики мощности внутри конвейера 115, 120, 200, выполненные с возможностью измерения или определения электрической характеристики (напр., тока, напряжения, коэффициента мощности, крутящего момента, скорости, входной мощности, выходной мощности и т.д.), динамометрические элементы и т.д. Контроллер 300 содержит комбинации аппаратного обеспечения и программного обеспечения, которые выполнены с возможностью, среди прочих вещей, управления работой конвейера 115, 120, 200, управления положением одного или более гидравлических цилиндров 325, активирования одного или более индикаторов 310 (напр., жидкокристаллического дисплея [«LCD»]), отслеживания работы конвейера 115, 120, 200 и/или системы 100 горной разработки и т.д.
[0022] В некоторых вариантах осуществления контроллер 300 содержит множество электрических и электронных составных элементов, которые обеспечивают мощность, оперативное управление и защиту составных элементов и модулей внутри контроллера 300, конвейера 115, 120, 200 и/или системы 100 горной разработки. Например, контроллер 300 содержит, среди прочих вещей, блок 350 обработки (напр., микропроцессор, микроконтроллер или другое подходящее программируемое устройство), память 355, блок 360 ввода и блок 365 вывода. Блок 350 обработки содержит, среди прочих вещей, блок 370 управления, арифметико-логическое устройство («ALU») 375 и множество регистрирующих устройств 380 (на фиг. 3 показанных, как группа регистрирующих устройств), и выполнен с использованием известной компьютерной архитектуры, такой как модифицированная гарвардская архитектура, архитектура фон Неймана и т.д. Блок 350 обработки, память 355, блок 360 ввода и блок 365 вывода, а также различные модули, связанные с контроллером 300, соединены одной или более управляющими и/или информационными шинами (напр., общей шиной 385). Управляющие и/или информационные шины показаны в общем на фиг. 3 для иллюстративных целей. Использование одной или более управляющих и/или информационных шин для взаимного соединения между различными модулями и составными элементами и связи между ними должно быть известно квалифицированному специалисту в данной области с учетом описанного в данном документе изобретения. В некоторых вариантах осуществления контроллер 300 частично или полностью выполнен на полупроводниковой интегральной схеме, представляет собой программируемую пользователем вентильную матрицу («FPGA»), представляет собой специализированную заказную интегральную схему («ASIC») и т.д.
[0023] Память 355 содержит, например, область хранения программ и область хранения данных. Область хранения программ и область хранения данных могут содержать комбинации различных типов запоминающих устройств, таких как постоянное запоминающее устройство («ROM»), оперативное запоминающее устройство («RAM») (напр., динамическое оперативное запоминающее устройство [«DRAM»], синхронное динамическое оперативное запоминающее устройство [«SDRAM»] И т.д.), электрически стираемое программируемое постоянное запоминающее устройство («EEPROM»), флэш-память, жесткий диск, SD-карта или другие подходящие магнитные, оптические, физические или электронные запоминающие устройства или структуры данных. Блок 350 обработки связан с памятью 355 и выполняет команды программного обеспечения, которые способны храниться в ОЗУ памяти 355 (напр., во время выполнения), ПЗУ памяти 355 (напр., обычно на постоянной основе), или на другом энергонезависимом машиночитаемом носителе, таком как другое запоминающее устройство или диск. Программное обеспечение, входящее в осуществление конвейера 115, 120, 200 и/или системы 100 горной разработки, может храниться в памяти 355 контроллера 300. Программное обеспечение содержит, например, встроенное программное обеспечение, одно или более приложений, программные данные, фильтры, правила, один или более программных модулей и другие выполняемые команды. Контроллер 300 выполнен с возможностью извлечения из памяти и выполнения, среди прочих вещей, команд, связанных с управлением процессами и способами, описанными в данном документе. В других конструкциях контроллер 300 содержит дополнительные, меньше или другие составные элементы.
[0024] Механизм привода или модуль 330 параметров двигателя соединен или связан с двигателями и приводами 340, 345, которые соединены с первой звездочкой и/или второй звездочкой. Модуль 330 параметров выполнен с возможностью получения сигналов, связанных с одним или более параметрами (напр., с током, напряжением, коэффициентом мощности, крутящим моментом, скоростью, входной мощностью, выходной мощностью и т.д.) двигателей 340, 345. В некоторых вариантах осуществления модуль 330 параметров получает сигналы, связанные с параметрами двигателя. В других вариантах осуществления модуль 330 параметров содержит или связан с одним или более датчиками 320 для определения параметров двигателя.
[0025] Двигателями 340, 345 управляют с помощью управляющих сигналов, получаемых от контроллера 300 или другого связанного контроллера. Двигатели 340, 345 также соединены с редукторами для уменьшения числа оборотов двигателей до числа оборотов, подходящего для звездочек и конвейера. В некоторых вариантах осуществления контроллер 300 выполнен с возможностью управления двигателями 340, 345 и конвейерами 115, 120 и/или системой 100 горной разработки, автономно используя датчики 320 и одну или более сохраненных программ или модулей. В других вариантах осуществления контроллер 300 выполнен с возможностью управления двигателями и конвейерами 115, 120 и/или системой 100 горной разработки на основе комбинации ручного ввода данных и автоматических средств управления. Один или более гидравлических цилиндров 325 также получают управляющие сигналы от контроллера 300, и выборочно выдвигают или втягивают раму концевой станции (напр., изменяют положение первой звездочки, второй звездочки и т.д.) на основе управляющих сигналов от контроллера 300. Контроллер 300 также отслеживает двигатели и один или более гидравлических цилиндров 325 для определения связанных характеристик. Например, контроллер 300 может отслеживать или определять электрические характеристики двигателей 340, 345, положение одного или более гидравлических цилиндров 325 (напр., выдвижение одного или более гидравлических цилиндров) и т.д. Хотя проиллюстрирован единственный контроллер, в других конструкциях контроллер 300 может быть разделен на множество контроллеров. Например, контроллер 300 может быть разделен на консолидированный блок управления («CCU»), программируемый блок управления («PCU») и т.д. CCU может быть помещен во взрывобезопасной оболочке и обеспечивает управление конвейерной системой. PCU представляет собой искробезопасную систему, которая может быть сопряжена с CCU, среди прочих вещей, для остановки, торможения, отключения и т.д., работы конвейера.
[0026] Модуль 305 пользовательского интерфейса используется для управления или отслеживания AFC или системы горной разработки. Например, модуль 305 пользовательского интерфейса выполнен с возможностью соединения с контроллером 300 для управления скоростью конвейера, частотой вращения одного или более двигателей и т.д. Модуль 305 пользовательского интерфейса может содержать комбинацию цифрового и аналогового устройств ввода или вывода, требуемых для достижения требуемого уровня управления и мониторинга AFC. Например, модуль 305 пользовательского интерфейса может содержать устройства отображения и ввода, такие как дисплей с сенсорным экраном, одну или более кнопок, циферблатов, переключателей, клавиш и т.д. Дисплеем, например, является жидкокристаллический дисплей («LCD»), светодиодный дисплей («LED»), дисплей на органических светодиодах («OLED»), электролюминесцентный дисплей («ELD»), дисплей с электронной эмиссией за счет поверхностной проводимости («SED»), дисплей с автоэлектронной эмиссией («FED»), жидкокристаллический дисплей на тонкопленочных транзисторах («TFT») и т.д. В других конструкциях дисплей представляет собой дисплей с суперактивной матрицей на органических светодиодах («AMOLED»). Модуль 305 пользовательского интерфейса также может быть выполнен с возможностью отображения условий или данных, связанных с AFC, в реальном времени или по существу в реальном времени. Например, модуль 305 пользовательского интерфейса выполнен с возможностью отображения измеренных электрических характеристик AFC, состояния AFC, натяжений цепей, состояний отказа (напр., провисание цепи, нулевое натяжение цепи и т.д.), количества выработанного материала на конвейере, положения цепи или составных элементов цепи и т.д. В некоторых вариантах осуществления модулем 305 пользовательского интерфейса управляют в сочетании с одним или более индикаторами 310 (напр., LED) для предоставления визуальных показаний состояния или условий конвейера 115, 120, 200 и/или системы 100 горной разработки, положения цепи или составных элементов цепи и т.д.
[0027] На фиг. 4 проиллюстрирована обобщенная иллюстрация конвейера 400 для системы 100 горной разработки. Конвейер 400 является аналогичным конвейерам 115, 120 и 200, описанным выше. Конвейер 400 содержит первую звездочку или звездочку 405 главного затвора, вторую звездочку или звездочку 410 заднего затвора, одну или более цепей 415 (напр., две цепи), первый гидравлический цилиндр 420, второй гидравлический цилиндр 425 и базисную точку 430. Базисная точка 430 соответствует, например, точке на конвейере 400, где инициируется картирование цепей 415, и/или точке на конвейере 400, где наиболее легко выполняется техническое обслуживание. Базисную точку 430 можно выбрать так, чтобы это была любая точка на конвейере 400. В некоторых вариантах осуществления базисная точка 430 может быть перекалибрована. Например, хотя имеется положительное, фиксированное взаимное расположение между цепями 415 и звездочками 405, 410, для предотвращения избыточного крутящего момента может быть активировано ограничивающее крутящий момент устройство, связанное с механизмом привода для звездочки. Когда ограничивающее крутящий момент устройство активировано, движение цепи не соответствует движению двигателя, а тахометр вала двигателя определяет угловое смещение. В результате, базисная точка 430 будет перекалибрована на новое угловое положение двигателя после деактивирования ограничивающего крутящий момент устройства. Перекалибровка базисной точки 430 может быть выполнена вручную или автоматически (напр., используя контроллер 300).
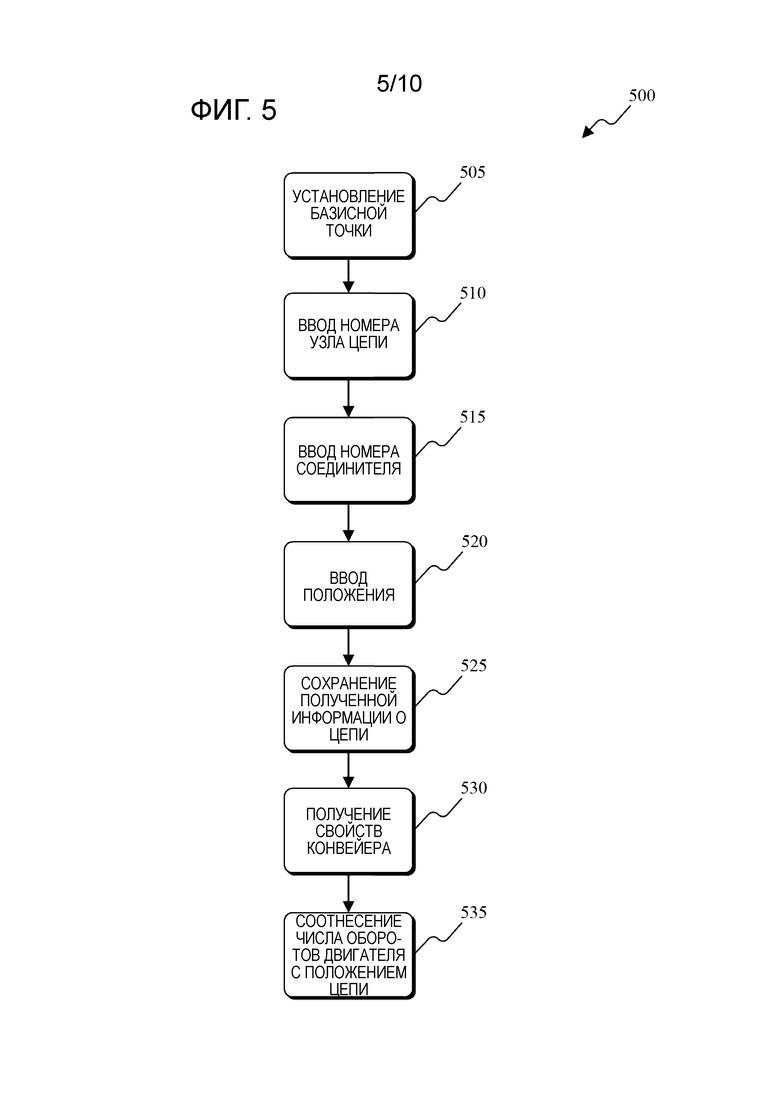
[0028] Карта цепи для цепей 415 конвейера 400 может быть создана на основании выбранной базисной точки, а также дополнительных свойств конвейера 400. На фиг. 5 предоставлен способ 500 создания карты цепи для цепей 415. Способ 500 связан и описан в данном документе относительно создания карты цепи для конвейера. Различные стадии, описанные в данном документе относительно способа 500, допускают выполнение одновременно, параллельно или в порядке, отличающемся от проиллюстрированного последовательного порядка выполнения. Способ 500 также может допускать выполнение с использованием меньшего количества стадий, чем показано в проиллюстрированном варианте осуществления.
[0029] Способ 500 начинается с установления базисной точки 430, как описано выше относительно Фиг. 4 (стадия 505). Базисная точка 430 соответствует, например, точке на конвейере 400, где инициируется картирование цепи, и/или точке на конвейере 400, где должно быть выполнено техническое обслуживание. Базисная точка 430 представляет собой контрольную точку для последующего ввода данных цепи и определения на основе положения цепи. После установления базисной точки 430, может быть введен номер узла цепи для идентификации конкретного узла цепи, который наносится на карту (стадия 510). Например, система горной разработки может содержать множество узлов цепи, которые используются с AFC, BSL и т.д. Идентификация номера узла цепи позволяет отличать один узел цепи от другого внутри системы горной разработки с целью обновления карты цепи, выполнения технического обслуживания и т.д. После введения номера узла цепи, вводят количества составных элементов цепи или соединителей (стадия 515). Соединителями цепи могут быть отдельные звенья цепи, пластины, звенья цепи и пластины и т.д. В некоторых вариантах осуществления каждый узел цепи содержит две цепи 415. Относительно AFC одна цепь может быть расположена на стороне очистного забоя конвейера, а другая цепь расположена от стороны очистного забоя конвейера. Цепи 415 постепенно вращаются по длине конвейера 400. Конвейер останавливается для каждого соединителя цепи, который подлежит картированию, и его соответствующие данные (напр., количество соединителей) вводят в карту цепи. После введения количества соединителей, положение соединителя цепи вводят в карту (стадия 520). Положение соединителя цепи может вводиться пользователем вручную или автоматически определяться и связываться с соединителем цепи. Соотнесение положения соединителя цепи и конкретного соединителя цепи может быть выполнено, когда каждый соединитель цепи по-отдельности наносится на карту, или положение соединителя цепи может быть позже соотнесено с конкретным соединителем цепи. Например, значение преобразователя или тахометра может использоваться для связи положения соединителя цепи с угловым положением исполнительного механизма (напр., двигателя). Затем значение тахометра вала двигателя позже может использоваться для формальной связи положения каждого соединителя цепи с абсолютным положением на конвейере (напр., относительно базисной точки 430). Когда была введена информация, связанная с последним соединителем цепи в цепи, общая длина цепей 415 известна и/или может быть рассчитана на основе количества соединителей цепи. Чтобы иметь информацию, конечный соединитель цепи может быть помечен или установлен для обозначения конца цикла (напр., один оборот вокруг конвейера 400). После того, как на стадиях 505-520 была введена информация о цепи для каждого соединителя цепи и узла цепи, введенная информация сохраняется в памяти, связанной с конвейером 400 или системой 100 горной разработки (напр., в памяти 355).
[0030] На стадии 530 одно или более свойств конвейера получают и/или извлекают из памяти (напр., памяти 355). Свойства конвейера включают информацию, связанную с тахометром вала двигателя, отношением коробки передач, измерениями шага/угла цепи (напр., угла цепи, выходящей из рамы концевой станции и т.д.), количеством зубцов на каждой звездочке и т.д. Данные свойства конвейера могут использоваться для соотнесения положения тахометра вала двигателя с расстоянием продвижения цепей 415 вдоль конвейера (напр., один полный оборот двигателя соответствует известному количеству соединителей цепи, проходящих базисную точку 430). В связи с этим, данные свойства конвейера используются для соотнесения относительного положения каждого соединителя цепи (напр., относительно базисной точки 430) с фактическим положением цепей 415 при поступательном движении вокруг конвейера (т.е., абсолютное положение и скорость соединителя цепи может быть определена или известна на основе фиксированной базисной точки 430 и вращения звездочки, приводимой в движение двигателем). В некоторых вариантах осуществления счетчик звеньев цепи прирастает на основании выходного сигнала от тахометра для подсчета количества звеньев цепи, которые прошли базисную точку. В подобных вариантах осуществления счетчик звеньев цепи может быть повторно установлен с любой частью цепей 415, соответствующей базисной точке 430. Когда положение каждого соединителя цепи соотнесено с вращением двигателя, карта цепи может использоваться для отслеживания вращения цепей 415 вокруг конвейера 400 по существу в реальном времени и обновления или вычисления абсолютного положения одного или более соединителей цепи (напр., каждого из соединителей цепи).
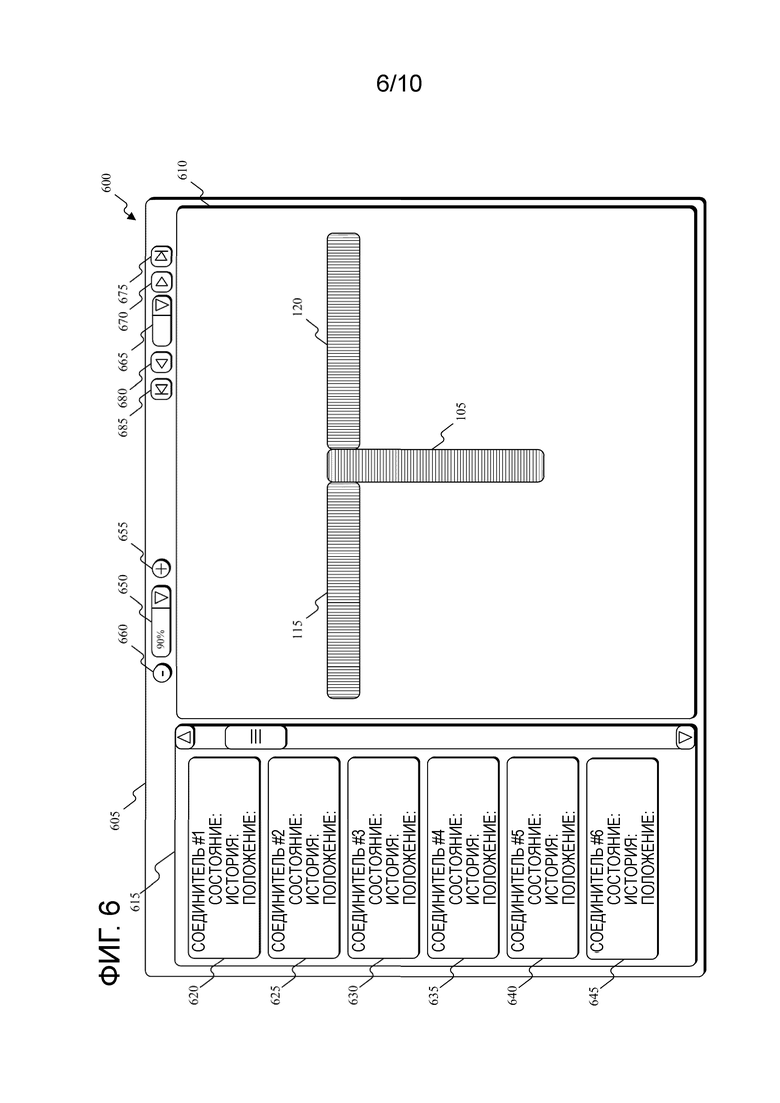
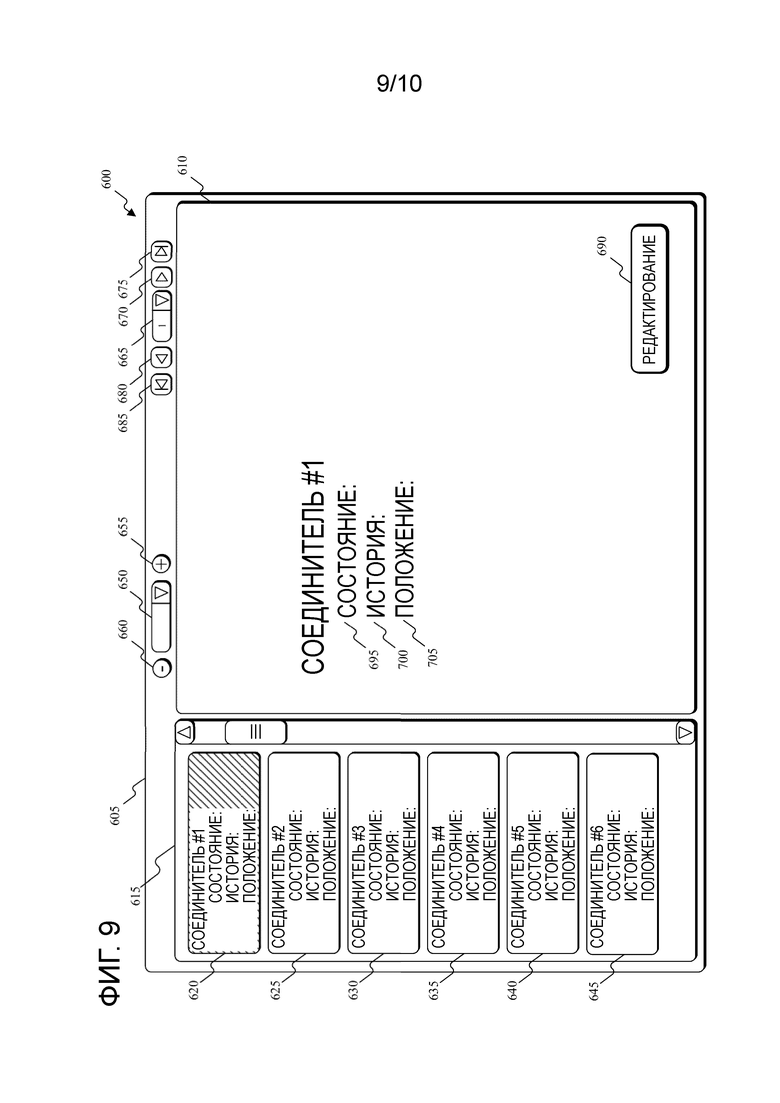
[0031] Фигуры 6-9 иллюстрируют интерфейс 600 для отображения карты цепи, обновления карты цепи, выполнения технического обслуживания на конвейере и/или мониторинга работы конвейера. Интерфейс 600 содержит первый экран 605. Первый экран 605 содержит окно 610 графического отображения и окно 615 отображения составного элемента или соединителя. Окно 610 графического отображения предоставляет графическое представление системы 100 горной разработки, содержащей AFC 115 и 120, а также BSL 105 (см. Фиг. 1). Пользователь может выбрать BSL 105, AFC 115 или AFC 120 для редактирования соответствующей карты цепи для каждого узла цепи для выполнения технического обслуживания конкретного одного из узлов цепи или отслеживания работы конкретного одного из узлов цепи, как описано более подробно ниже. В некоторых вариантах осуществления AFC 115, 120 и BSL 105 управляют посредством отдельных интерфейсов, или каждый конвейер защищен паролем для ограничения доступа в карту цепи для отдельных конвейеров.
[0032] Оператор может выполнять функции интерфейса 600 посредством выбора или заполнения частей интерфейса 600 информацией (напр., текст, наборы и т.д.). В некоторых вариантах осуществления пользователь заполняет участки ввода интерфейса 600 (напр., текстовые окна, окна флажков и т.д.) посредством ввода текста с помощью механической или виртуальной клавиатуры и используя указывающее или выбирающее устройство, такое как мышь, для управления курсором на дисплее в пользовательском интерфейсе 305. Контроллер 300 получает и обрабатывает входные сигналы с клавиатуры и мыши и переводит в визуальный результат или действие в интерфейсе 600. Например, если пользователь вводит текст, используя клавиатуру, активированные ключи заставляют контроллер 300 генерировать сигналы, которые представлены в виде машинописного текста в интерфейсе 600. Аналогичным образом, нажатие кнопки мыши, которое соответствует местоположению курсора на экране, приводит к выбору/отмене выбора окна флажка, подсветке текста и т.д. Аналогичные вводы могут обеспечиваться через использование дисплея с сенсорным экраном. Другие устройства ввода для выбора или заполнения частей интерфейса 600 включают кнопки, циферблаты, переключатели, клавиши и т.д.
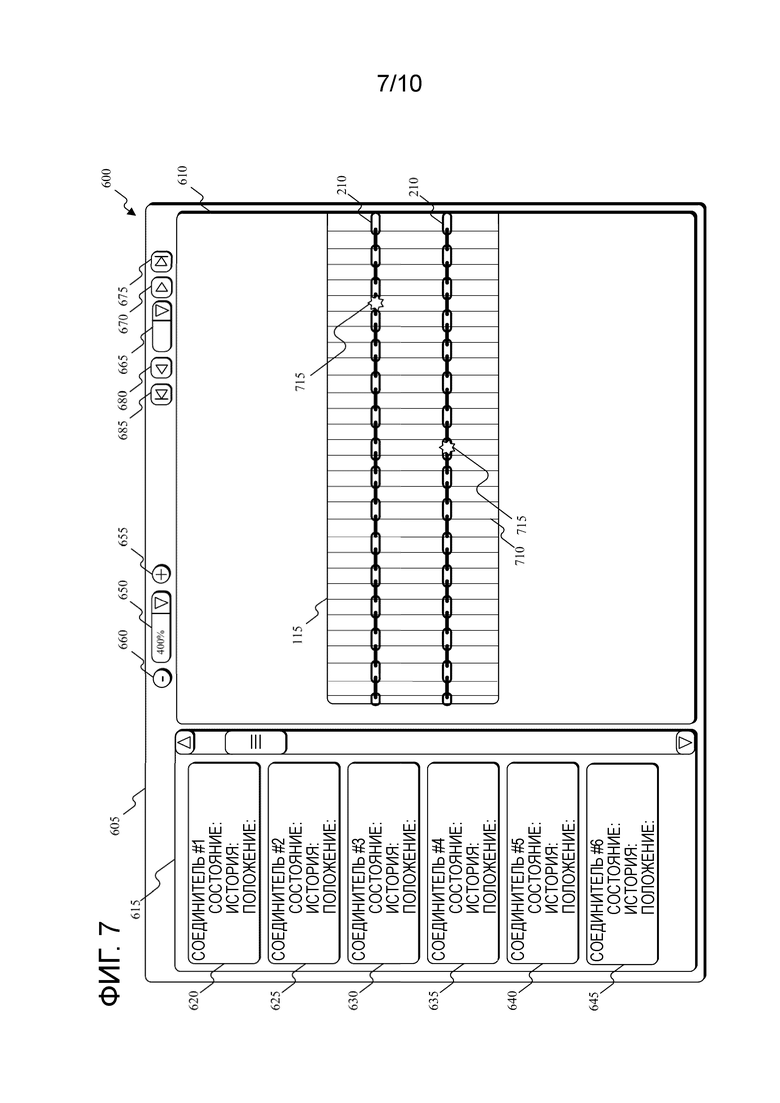
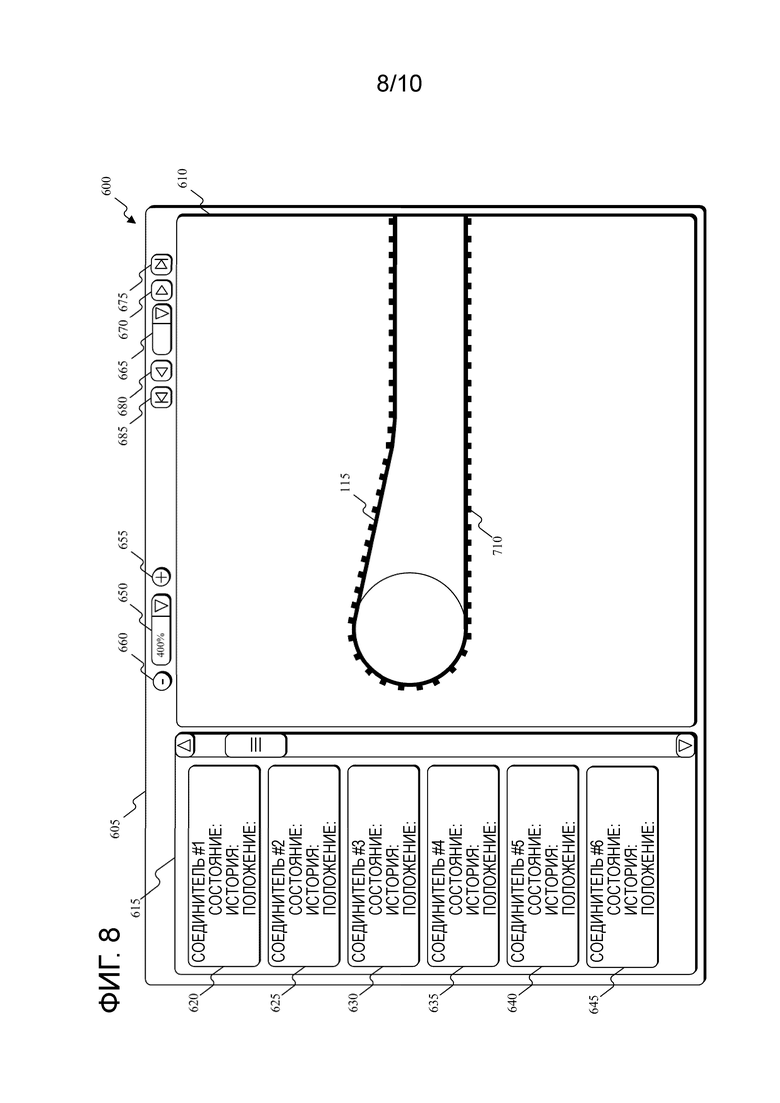
[0033] Окном 610 графического отображения можно управлять, используя устройство 650 ввода масштаба изображения, устройство 655 ввода увеличения масштаба изображения и устройство 660 ввода уменьшения масштаба изображения. Устройства 650-660 ввода могут использоваться для изменения масштаба изображения конкретного узла цепи или соединителя цепи, как также описано ниже. Фиг. 7 иллюстрирует окно 610 графического отображения с увеличением масштаба AFC 115. Графически проиллюстрированы отдельные соединители цепи AFC 115. Для просмотра информации о состоянии, информации об истории, информации о положении и т.д. оператор может выбрать конкретный один из множества соединителей 710 цепи, проиллюстрированных в окне 610 графического отображения. Окно 610 графического отображения также может иллюстрировать соединители 715 цепи, которые, например, требуют технического обслуживания. В некоторых вариантах осуществления для каждого соединителя 710 цепи в окне 610 графического отображения также отображается номер соединителя цепи. Дополнительно или в качестве альтернативы на изображениях сверху системы 100 горной разработки и AFC, проиллюстрированных на фигурах 6 и 7, соответственно, конкретно узел цепи может быть виден в профиль, как проиллюстрировано на фиг. 8. Аналогично Фигурам 6 и 7, в отношении Фиг. 8 для просмотра информации о состоянии, информации об истории, информации о положении и т.д. оператор может выбрать конкретный один из множества соединителей 710 цепи, проиллюстрированных в окне 610 графического отображения.
[0034] Окно 615 отображения соединителя также предоставляет информацию, связанную с каждым из соединителей цепи в каждом из узлов цепи. Окно отображения соединителя позволяет пользователю выбрать конкретный соединитель и/или конкретный узел цепи. Например, выбор соединителя #1 в окне 615 отображения соединителя вызывает отображение информации о состоянии, информации об истории, информации о положении соединителя и т.д. В окне 610 графического отображения, как проиллюстрировано на фиг. 9., для изменения или обновления информации, связанной с конкретным соединителем может быть выбрано устройство редактирования ввода (напр., клавиша). Например, информация, связанная с конкретным соединителем, может обновляться после выполнения технического обслуживания, может маркироваться, как повреждение (напр., когда может требоваться техническое обслуживание) и т.д. В некоторых вариантах осуществления положение каждого соединителя может автоматически обновляться по существу в реальном времени. В других вариантах осуществления положение соединителя обновляется, когда соединитель выбирают в интерфейсе 600. Дополнительная информация, такая как положение цепи и положение на цепи, где возникшее состояние неожиданной и тяжелой перегрузки, положения станции технического обслуживания, измерения удлинения и оставшийся срок службы цепи могут вручную или автоматически включаться в карту цепи. Оставшийся срок службы цепи может быть определен контроллером 300 на основании модуля упругости цепи. Модуль упругости цепи изменяется по мере прохождения через свой цикл долговечности. Средний модуль упругости цепи может быть рассчитан на основании фазы звездочки и прикладываемого крутящего момента. Модуль упругости цепи может быть зарегистрирован в карте цепи, и при достижении конкретного значения модуля упругости оператору может быть предоставлено указание, что цепь приближается к окончанию своего срока службы. В некоторых вариантах осуществления удлинение цепи или величина натяжения цепи в цепи 415 в заданное время определяется способом, аналогичным способу, раскрытому в патентной заявке США № 13/553215, озаглавленной «SYSTEMS AND METHODS FOR CONTROLLING A CONVEYOR IN A MINING SYSTEM», поданной 19 июля 2012 года, полное содержание которой включено в настоящий документ посредством ссылки.
[0035] Интерфейс 600 также содержит устройства управления вводом для перемещения между узлами цепи и составными элементами цепи внутри узлов цепи. Например, устройство 665 ввода представляет собой выпадающее меню, которое позволяет оператору выбрать конкретный узел цепи или конкретный соединитель цепи внутри узла цепи. Для перемещения также может использоваться устройство 670 ввода вперед и устройство 675 ввода вперед в конец. Устройство 670 ввода вперед увеличивает узел цепи или соединитель цепи, отображаемый в окне 610 графического отображения, до следующего узла цепи или соединителя цепи. Устройство 675 ввода вперед в конец продвигает окно 610 графического отображения на последний узел цепи или последний соединитель цепи в узле цепи. Для перемещения также может использоваться устройство 680 ввода назад и устройство 685 ввода назад в конец. Устройство 680 ввода назад уменьшает узел цепи или соединитель цепи, отображаемый в окне 610 графического отображения, до предшествующего узла цепи или соединителя цепи. Устройство 685 ввода назад в конец отводит окно 610 графического отображения на первый узел цепи или первый соединитель цепи в узле цепи.
[0036] Контроллер 300 задействован или выполнен с возможностью вычисления или определения положения любого из соединителей цепи (напр., звеньев цепи, пластин и т.д.) в цепи 415 для предоставления оператору через интерфейс 600 информации о положении по существу в реальном времени. Например, контроллер 300 получает от первого датчика (напр., тахометра двигателя) сигнал, связанный с количеством звеньев цепи, которые прошли базисную точку 430. В некоторых вариантах осуществления контроллер 300 вычисляет или определяет количество звеньев цепи, которые прошли базисную точку 430, например, используя положение тахометра двигателя, передаточное число редуктора трансмиссии, измерения шага цепи и количество зубцов на звездочке для определения или вычисления количества звеньев цепи, которые прошли базисную точку 430, как описано выше. На основании отмеченных факторов контроллер 300 узнает или определяет количество звеньев цепи, которые соответствуют одному обороту звездочки (или частичному обороту звездочки) согласно определяемому угловому смещению от тахометра. После того, как контроллер 300 узнает количество звеньев или соединителей цепи, которые будут оборачиваться вокруг звездочки, такое же количество звеньев или соединителей цепи должны проходить базисную точку (т.е. вследствие фиксированного, положительного взаимного расположения между цепью и звездочкой). Затем с базисной точкой 430 в качестве ссылки контроллер 300 вычисляет или определяет текущее местоположения каждого соединителя или звена цепи в конвейере.
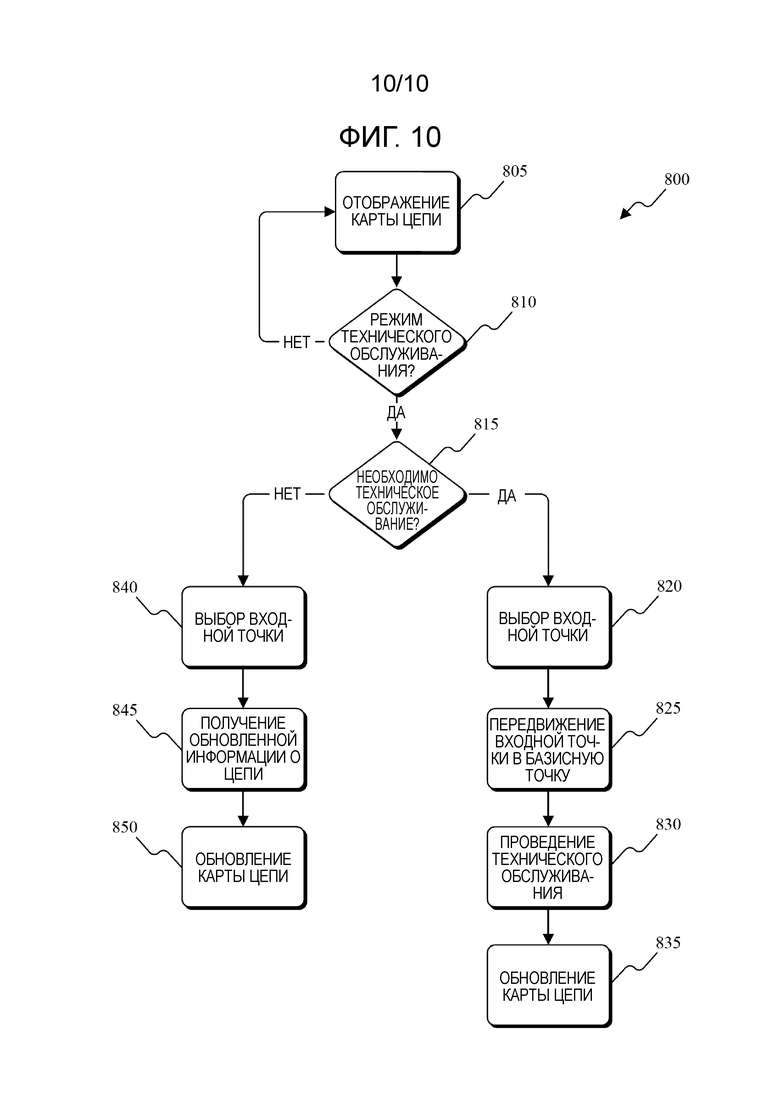
[0037] С новейшей информацией о положении по существу в реальном времени можно отслеживать узел цепи и его соединители цепи, иметь обновленную информацию об их истории и состоянии и выполнение технического обслуживание эффективным образом. Фиг. 10 иллюстрирует способ 800, который связан и описан в данном документе относительно обновления карты цепи и выполнения технического обслуживания цепи. Различные стадии, описанные в данном документе относительно способа 800, допускают выполнение одновременно, параллельно или в порядке, который отличается от проиллюстрированного последовательного порядка выполнения. Способ 800 также может допускать выполнение с использованием меньшего количества стадий, чем показано в проиллюстрированном варианте осуществления. Способ 800 начинается с отображения карты цепи, как описано выше относительно Фигур 6-9 (стадия 805). На стадии 810 контроллер 300 определяет, введен ли конвейер в режим технического обслуживания. Режимом технического обслуживания, например, является режим, в котором один или более соединителей цепи или других составных элементов конвейера нуждается в ремонте или замене, один или более соединителей цепи имеют новую информацию, которая должна быть введена карту, и т.д. Если на стадии 810 конвейер не введен в режим технического обслуживания (напр., работает нормально), способ 800 возвращается на стадию 805. Если на стадии 810 конвейер введен в режим технического обслуживания, происходит определение того, требует ли режим технического обслуживания немедленного технического обслуживания, или может ли продолжаться эксплуатация конвейера без немедленного технического обслуживания (стадия 815). Если требуется немедленное техническое обслуживание, способ 800 продолжается на стадии 820, где входной точкой является выбранный узел цепи. Входная точка соответствует, например, точке в узле цепи, которая требует технического обслуживания, и/или точке на конвейере, где должно быть выполнено техническое обслуживание. Входную точку передвигают, например, в предварительно определенную базисную точку 430 (напр., когда базисная точка соответствует предпочтительной точке технического обслуживания) (стадия 825). После того, как входная точка была передвинута в положение, где будет выполняться техническое обслуживание, выполняется техническое обслуживание (стадия 830). Техническое обслуживание может включать замену планки, замену звена цепи, замену ряда соединителей, добавление соединителя, выполнение перекалибровки и т.д. После технического обслуживания обновляется карта цепи для отражения ремонтов/замен, которые были выполнены (стадия 835). В некоторых вариантах осуществления каждый раз, когда оператор модифицирует карту цепи (напр., добавляет информацию, удаляет информацию, обновляет информацию и т.д.), модификация может иметь временную отметку с датой, временем и идентификацией оператора, чтобы позволять отслеживать модификации в карте цепи.
[0038] Если на стадии 815 не требуется немедленное техническое обслуживание, способ 800 продолжается на стадии 840, где выбирается входная точка цепного узла. Входная точка соответствует, например, точке в узле цепи, которая должна быть обновлена на карте цепи (т.е., когда не требуется немедленное техническое обслуживание) или, которую необходимо отслеживать, используя карту цепи. На стадии 845 оператор предоставляет обновленную информацию, связанную с узлом цепи (напр., соединителем цепи), и карта цепи обновляется для отражения новой информации, полученной от оператора. В некоторых вариантах осуществления информация, которая вводится в карту цепи, которая применима к многочисленным соединителям цепи, или является отдельной для конкретного соединителя и его истории, проиллюстрирована на карте цепи различным цветом.
[0039] Таким образом, изобретение среди прочих вещей может в общем предоставлять системы, способы, устройства, интерфейсы и машиночитаемый носитель для создания карты цепи для конвейера, обновления карта цепи и выполнения технического обслуживания в цепи.
Изобретение относится к конвейеру, такому как забойный скребковый конвейер («AFC») или консольный перегружатель («BSL»). Техническим результатом является создание карты цепи для конвейера, обновления карты цепи и выполнения технического обслуживания в цепи. Система горной разработки содержит конвейер и контроллер. Конвейер содержит первую звездочку и вторую звездочку, цепь, механизм привода и датчик. Цепь связана с первой звездочкой и второй звездочкой и содержит множество составных элементов цепи. Механизм привода соединен с первой звездочкой или второй звездочкой и выполнен с возможностью приведения в движение первой звездочки или второй звездочки. Датчик выполнен с возможностью генерирования сигнала, связанного с характеристикой конвейера. Контроллер выполнен с возможностью приема сигнал от датчика, определения количества составных элементов цепи, которые прошли базисную точку на основании сигнала, определения местоположения по меньшей мере одного из множества составных элементов цепи на основании количества составных элементов цепи, которые прошли базисную точку, и обновления карты цепи на основании местоположения. 3 н. и 17 з.п. ф-лы, 10 ил.
1. Система горной разработки, содержащая:
конвейер, содержащий:
первую звездочку и вторую звездочку,
цепь, соединенную с первой звездочкой и второй звездочкой, при этом цепь содержит множество составных элементов цепи,
механизм привода, соединенный с первой звездочкой или второй звездочкой, при этом механизм привода выполнен с возможностью приведения в действие первой звездочки или второй звездочки, и
датчик, выполненный с возможностью генерирования сигнала, связанного с характеристикой конвейера; и
контроллер, выполненный с возможностью
получения сигнала от датчика,
определения на основании сигнала количества составных элементов цепи, которые прошли базисную точку,
определения местоположения по меньшей мере одного из множества составных элементов цепи на основании количества составных элементов цепи, которые прошли базисную точку, и
обновления карты цепи на основании местоположения по меньшей мере одного из множества составных элементов цепи.
2. Система горной разработки по п. 1, в которой характеристика конвейера представляет собой положение, связанное с механизмом привода.
3. Система горной разработки по п. 2, в которой датчик представляет собой тахометр.
4. Система горной разработки по п. 1, дополнительно содержащая устройство отображения.
5. Система горной разработки по п. 4, в которой контроллер дополнительно выполнен с возможностью генерирования одного или более сигналов для создания графического представления цепи на основании карты цепи, при этом графическое представление цепи отображается на устройстве отображения.
6. Система горной разработки по п. 5, в которой графическое представление цепи содержит графическое представление местоположения по меньшей мере одного из множества составных элементов цепи.
7. Система горной разработки по п. 6, в которой контроллер дополнительно выполнен с возможностью позиционирования по меньшей мере одного из составных элементов цепи в базисной точке на основании выбора, сделанного на графическом представлении цепи.
8. Способ определения местоположения составного элемента цепи в конвейере системы горной разработки, в котором осуществляют:
получение в процессоре сигнала от датчика, связанного с характеристикой конвейера;
определение, используя процессор, количества составных элементов цепи, которые прошли базисную точку на основании сигнала;
определение, используя процессор, местоположения составного элемента цепи на основании количества составных элементов цепи, которые прошли базисную точку; и
обновление, используя процессор, карты цепи на основании местоположения составного элемента цепи.
9. Способ по п. 8, в котором характеристика конвейера представляет собой положение, связанное с механизмом привода.
10. Способ по п. 9, в котором датчик представляет собой тахометр, связанный с механизмом привода.
11. Способ по п. 8, в котором дополнительно осуществляют генерирование одного или более сигналов для создания графического представления цепи на основании карты цепи и отображения графического представления цепи на устройстве отображения.
12. Способ по п. 11, в котором графическое представление цепи содержит графическое представление местоположения составного элемента цепи.
13. Способ по п. 12, в котором дополнительно получают входной сигнал, связанный с графическим представлением цепи, и размещают составной элемент цепи в базисной точке на основании входного сигнала.
14. Способ по п. 13, в котором дополнительно выполняют техническое обслуживание в цепи в базисной точке и обновляют карты цепи на основании выполнения технического обслуживания.
15. Контроллер, содержащий процессор и память, при этом контроллер содержит выполняемые команды, хранящиеся в памяти, для:
получения в процессоре сигнала от датчика, связанного с характеристикой конвейера;
определения на основании сигнала, используя процессор, количества составных элементов цепи, которые прошли базисную точку конвейера;
определения, используя процессор, местоположения составного элемента цепи на основании количества составных элементов цепи, которые прошли базисную точку конвейера; и
обновления, используя процессор, карты цепи, хранящейся в памяти, на основании местоположения составного элемента цепи.
16. Контроллер по п. 15, в котором характеристика конвейера представляет собой положение, связанное с механизмом привода.
17. Контроллер по п. 16, в котором датчик представляет собой тахометр, связанный с механизмом привода.
18. Контроллер по п. 15, дополнительно содержащий выполняемые команды, хранящиеся в памяти, для:
генерирования одного или более сигналов для создания графического представления цепи на основании карты цепи; и
отображения графического представления цепи на устройстве отображения.
19. Контроллер по п. 18, в котором графическое представление цепи содержит графическое представление местоположения составного элемента цепи.
20. Контроллер по п. 19, дополнительно содержащий выполняемые команды, хранящиеся в памяти, для:
получения входного сигнала, связанного с графическим представлением цепи; и позиционирования составного элемента цепи в базисной точке на основании входного сигнала.
| RU 2012132477 A, 27.01.2014 | |||
| US 20070114110 A1, 24.05.2007 | |||
| US 7779994 B1, 24.08.2010 | |||
| US 20150144459 A1, 28.05.2015 | |||
| WO 2012034029 A1, 15.03.2012. |

