Изобретение относится к области мехатронных систем и может найти широкое применение в робототехнике и машиностроении.
В последние годы значительное внимание исследователей приобретает разработка приводов с высокой удельной мощностью. Данные приводы востребованы в различных приложениях науки и техники, включающих в себя экзоскелеты, роботизированные манипуляторы и их схваты и многие другие. Множество указанных устройств требуют обеспечения линейного перемещения рабочего органа, что в традиционных приводах достигается применением преобразователей движения из вращательного в поступательное типа винт-гайка, шарико-винтовых передач (ШВП), а также передач гибкой связью (тросовых, ременных, цепных). Однако жесткие передачи (винт-гайка, ШВП) зачастую имеют чрезмерно высокий вес, стоимость и низкий КПД, в то время как применение тросовых передач зачастую сопряжено с необходимостью обеспечения требуемого натяжения на тросах во время работы для устранения провисания, а также с техническими сложностями обеспечения нахождения тросов на шкивах.
В последнее время все более широкое применение находят приводы на основе скручивания нитей (ПСН), в которых один или несколько гибких элементов (тросов или нитей) установлен соосно с валом электродвигателя и сокращается за счет закручивания. Таким образом, скрученные нити выступают в качестве преобразователя вращательного движения в поступательное. Приводы данного типа имеют высокую удельную мощность и высокий КПД, компактны, а также чрезвычайно просты в установке и использовании [1-2]. В качестве материала нитей чаще всего используются синтетические волокна, получаемые химическим превращением природных органических полимеров (например, целлюлозы, казеина, протеинов или морских водорослей). Наиболее широко используемыми материалами являются кевлар (пара-арамидное волокно полипарафенилен-терефталамид), тефлон (политетрафторэтилен), вектран, спектра, дайнема и другие химические волокна.
Известно устройство «Устройство фиксации угла спинки стула» по патенту Кореи №KR1020190131215 [3], приоритет 16.05.2018 г. В данном изобретении рабочий элемент кресла включает в себя соединительную штангу и рабочий рычаг, установленный на валу вращения кресла. Одна сторона рамы сиденья снабжена приводным узлом, который обеспечивает вращательное усилие. Блок передачи мощности соединен с помощью нитей с рычагом управления. Другая сторона блока передачи мощности соединена с блоком привода. Блок передачи мощности приводит в действие рабочий рычаг за счет скручивания нитей, при этом блок управления подключен к блоку привода и управляет им для приведения привода действие.
Недостатком такого привода является то, что управляющая и силовая электроника (драйвер электродвигателя, микропроцессор с программой управления) располагается удаленно, а также то, что нити жестко закрепляются непосредственно на валу двигателя, что существенно снижает скорость замены нитей при износе. Также в данном приводе используется коллекторный электродвигатель постоянного тока, что делает конструкцию менее компактной.
Известно устройство «Тросовый привод на скрученных нитях» по работе М. Хоссеини [4]. Привод исполнен в едином корпусе и включает в себя: крепление с внешней стороны корпуса; оптический датчик силы, располагающийся между креплением и корпусом; коллекторный двигатель постоянного тока; муфта, установленная на валу двигателя, с собственным выходным валом, к которому закрепляются нити; датчик положения угла, установленный на муфте; упорный подшипник; гибкие нити. Электрический двигатель приводит в действие цапфу, жестко закрепленную на валу двигателя, с установленными на ней нитями, что вызывает их закручивание и поступательное перемещение за счет сокращения. Осевые нагрузки, развиваемые на нитях со стороны рабочего органа, передаются на корпус привода через упорный подшипник. Результирующие напряжения приводят к деформациям части датчика силы с установленным на ней чувствительным элементом, что позволяет оценить действующие силы за счет известной жесткости датчика.
Недостатком данного привода являются: установка датчика положения вала двигателя вне корпуса двигателя, что значительно увеличивает линейные размеры привода; сложность исполнения корпуса привода и его сборки; зависимость чувствительности и точности измерения силы от механического исполнения корпуса привода и свойств крепежных элементов корпуса, необходимых для установки привода; удаленное расположение датчика силы от нитей, предоставляющее лишь косвенные измерения действующих напряжений; использование коллекторного двигателя постоянного тока, что не позволяет сделать привод компактным; вынесенное исполнение управляющей и силовой электроники.
Наиболее близким аналогом является «Привод и его конструкция», патент США №US20180298996 [5], приоритет 12.10.2015 г. Привод включает в себя: блок нитей, один конец которых присоединен к рабочему органу; электропривод, к чьему валу присоединен второй конец нитей, перемещающий рабочий орган за счет изменения длины нитей; блок ограничения перемещения, внутри которого установлены нити.
Недостатком данного привода является размещение управляющих частей (электрический двигатель, драйвер двигателя и иная управляющая электроника) в разных точках пространства (вне единого корпуса), отсутствие выделенной муфты с быстроразъемным соединением для закрепления нитей, что значительно снижает скорость замены нитей при их износе, неоптимальное использование упорного подшипника в соответствующем узле.
Согласно заявленному изобретению, предлагается новый мехатронный привод, свободный от упомянутых недостатков и обладающий рядом преимуществ по сравнению с известными аналогами.
Задачей изобретения является конструирование самостоятельного линейного мехатронного привода с системой слежения за натяжением и положением нитей в ходе работы.
Технический результат заключается в расширении арсенала технических средств мехатронного привода при обеспечении компактности.
Технический результат достигается тем, что мехатронный привод на скрученных нитях содержит корпус, представляющий собой единую сборку, в котором установлены последовательно драйвер электродвигателя, датчик положения, магнит, электродвигатель постоянного тока, муфта, нити, подшипниковый узел, датчик силы, при этом вращение электродвигателя передается через муфту на нити, один конец которых жестко закреплен в муфте, а другой присоединен к рабочему органу.
Сущность изобретения показана на фигурах.
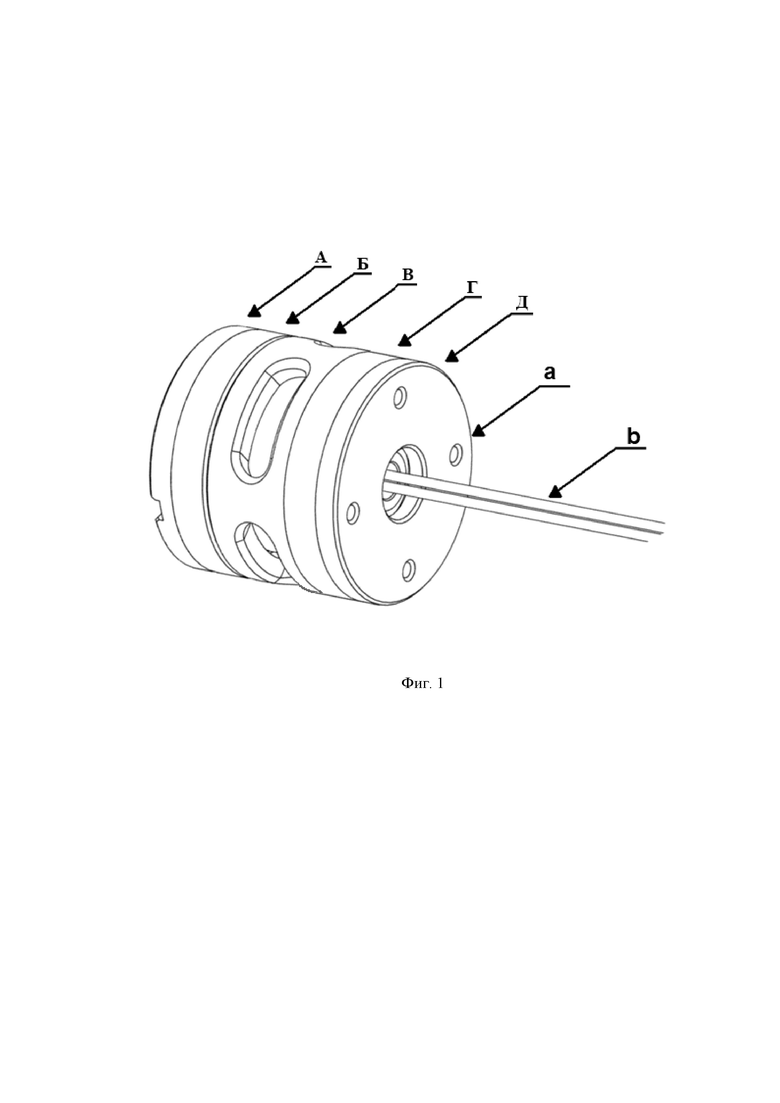
На фиг. 1 показан предлагаемый мехатронный привод в собранном (едином) корпусе;
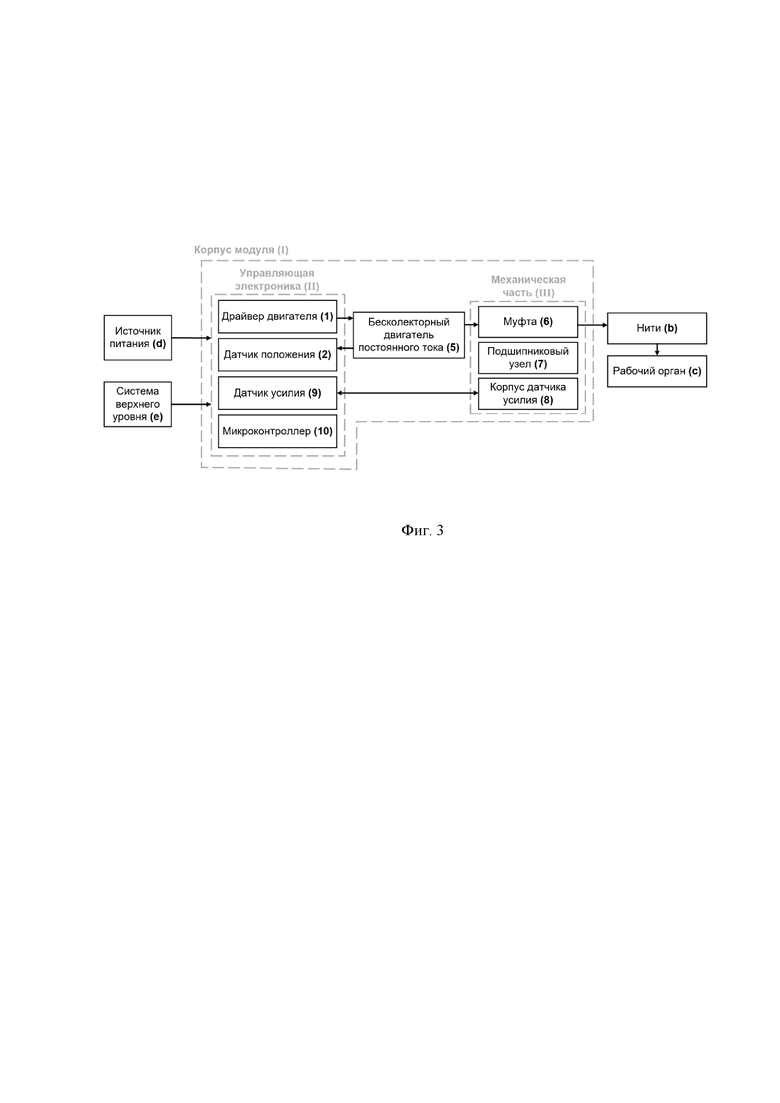
На фиг. 2 показан предлагаемый мехатронный привод в разобранном виде;
На фиг. 3 показана принципиальная схема управления предлагаемого мехатронного привода.
Мехатронный привод на скрученных нитях работает следующим образом.
На фиг. 1 показан мехатронный привод в собранном корпусе, основные элементы которого включают в себя: крышку драйвера электродвигателя А, корпус драйвера Б, корпус В для закрепления бесколлекторного электродвигателя, корпус датчика силы Г, техническую крышку Д, одну или несколько нитей b, у которых один конец закреплен на муфте (внутри корпуса a). Все корпусные части (Б, В, Г) кроме крышек собираются в единый корпус с помощью резьбового соединения одного диаметра, при этом резьба нарезана на самом корпусе, что исключает необходимость использования дополнительных монтажных элементов при сборке привода. Крышка драйвера электродвигателя А устанавливается с натягом в корпус драйвера Б и дополнительно фиксируется двумя винтами. Техническая крышка Д вкручивается с помощью корпусного резьбового соединения в корпус датчика силы Г и дополнительно закрепляется на электродвигатель с помощью четырех винтов.
На фиг. 2 представлен мехатронный привод на скрученных нитях в разобранном виде. Драйвер электродвигателя 1 предназначен для передачи управляющих сигналов на электродвигатель, а также для обработки сигналов с различных датчиков. Для измерения положения вала двигателя используется датчик положения (магнитный энкодер) 2, при этом магнит 3 крепится на вращающемся валу 4 бесколлекторного электродвигателя постоянного тока 5 со стороны, противоположной нитям. Вращение вала электродвигателя передается через муфту 6 на одну или несколько нитей, которые сокращаются при закручивании вокруг своей оси и таким образом приводят в движение рабочий орган, закрепленный на их противоположном конце. Тем самым нити выполняют функцию редуктора, преобразующего вращательное движение вала электродвигателя в поступательное движение рабочего органа. Муфта 6 является быстроразъемным соединением, не требующим закрепления нитей на валу электродвигателя с помощью винтов или иных технических средств.
На муфту установлен подшипниковый узел 7 с упорным подшипником, который служит для восприятия нагрузок, действующих вдоль оси вала электродвигателя в направлении рабочего органа. Натяжение на нитях измеряется на основании оценки сил реакции, возникающих в подшипниковом узле 7. Для этого подшипниковый узел устанавливается в корпус датчика силы 8 с закрепленным внутри датчиком силы 9. Таким образом, силовые нагрузки, создаваемые рабочим органом и действующие вдоль оси нитей b, изменяют натяжение на нитях, из-за чего подшипник 7 оказывает давление на чувствительный элемент датчика силы 9. Датчик силы (любого типа) преобразует данные о деформации своего чувствительного элемента в информацию о действующей силе на основании данных предварительной калибровки с помощью стандартных программных средств.
При износе нитей b для их быстрой замены следует открыть технической крышку Д, затем выкрутить сборку датчика силы Г из корпуса электродвигателя В. После этого извлечь нити b и установить новые с закрепленным на них элементом муфты 6, а затем установить подшипниковый узел и вкрутить корпус датчика силы Г в корпус двигателя В, зафиксировав техническую крышку Д.
На фиг. 3 представлена принципиальная схема управления мехатронного привода. Укрупненно привод содержит в единой сборке I электрическую часть II и механическую часть III. Электрическая часть служит для преобразования сигналов, поступающих с системы верхнего уровня e, в напряжение на обмотках электродвигателя 5. Питание привода осуществляется через внешний источник питания d, подключенный к блоку электроники. В состав блока электрической части входит микроконтроллер 10, отвечающий за выработку сигналов управления, подающихся на драйвер двигателя 1, а также за измерение и обработку сигналов с датчика положения 2 и датчика усилия 9.
Механическая часть привода включает в себя муфту 6, подшипниковый узел 7 и датчик силы 8. Муфта приводит во вращение нити b, чей другой конец установлен на рабочем органе с.
Взаимодействие между механической частью и управляющей электроникой происходит через бесколлекторный двигатель постоянного тока 5, выполняющего роль электромеханического преобразователя. В частности, изменение углового положения двигателя регистрируется датчиком положения 2, и эта информация затем поступает в микроконтроллер для корректировки управляющих сигналов. Сигналы управления передаются через драйвер двигателя 1 на двигатель, который через муфту 6 приводит в движение нити, вызывая тем самым перемещение рабочего органа.
Предлагаемый мехатронный привод на скрученных нитях представляет собой электромеханическое устройство с числовым программным управлением, способное самостоятельно реализовать слежение за положением рабочего органа на основе информации с датчика положения вала двигателя и встроенного датчика силы. Все основные компоненты привода кроме источника питания (электродвигатель, датчик силы и положения вала двигателя, соединительная муфта, подшипниковый узел, управляющая и силовая электроника) находятся в едином компактном корпусе, что делает привод универсальным и независимым, а также простым в установке и использовании.
СПИСОК ЛИТЕРАТУРЫ
[1] Palli, G., Natale, C., May, C., Melchiorri, C. and Wurtz, T., 2012. Modeling and control of the twisted string actuation system. IEEE/ASME Transactions on Mechatronics, 18(2), pp.664-673.
[2] Gaponov, I., Popov, D. and Ryu, J.H., 2013. Twisted string actuation systems: A study of the mathematical model and a comparison of twisted strings. IEEE/ASME Transactions on Mechatronics, 19(4), pp.1331-1342.
[3] Патент Кореи №KR1020190131215, приоритет 16.05.2018 г.
[4] Hosseini, M., Meattini, R., Palli, G. and Melchiorri, C., 2017. A wearable robotic device based on twisted string actuation for rehabilitation and assistive applications. Journal of Robotics, 2017.
[5] Патент США №US20180298996, приоритет 12.10.2015 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| Мехатронный модуль для поворота рулевого вала транспортно-технологического средства | 2022 |
|
RU2796264C1 |
| МЕХАТРОННЫЙ ТЯГОВЫЙ МОДУЛЬ | 2016 |
|
RU2621410C1 |
| МЕХАТРОННАЯ СИСТЕМА ФОРМИРОВАНИЯ ИНДИВИДУАЛЬНОГО ИНТРАОПЕРАЦИОННОГО ПОЛОЖЕНИЯ ПАЦИЕНТА | 2022 |
|
RU2803982C1 |
| Двигательная установка подводного аппарата | 2017 |
|
RU2699178C2 |
| МЕХАТРОННАЯ УСТАНОВКА ДЛЯ ИССЛЕДОВАНИЯ РОТОРНЫХ СИСТЕМ | 2018 |
|
RU2701744C1 |
| ИНДУКТОРНАЯ ЭЛЕКТРИЧЕСКАЯ МАШИНА СО ВСТРОЕННЫМ ПРЕОБРАЗОВАТЕЛЕМ | 2018 |
|
RU2689380C1 |
| ЭЛЕКТРИЧЕСКАЯ МАШИНА СО ВСТРОЕННЫМ ПРЕОБРАЗОВАТЕЛЕМ | 2017 |
|
RU2656866C1 |
| Бесколлекторный электродвигатель постоянного тока с регулировкой механических характеристик в широком диапазоне | 2024 |
|
RU2832743C1 |
| ДВИГАТЕЛЬ ПОСТОЯННОГО ТОКА | 2001 |
|
RU2206955C2 |
| УСТРОЙСТВО ДИАГНОСТИРОВАНИЯ И ОЦЕНКИ ТЕХНИЧЕСКОГО СОСТОЯНИЯ МЕХАТРОННЫХ ПРИВОДОВ | 2014 |
|
RU2578044C1 |

Мехатронный привод на скрученных нитях содержит корпус, представляющий собой единую сборку. В корпусе последовательно установлены драйвер электродвигателя, датчик положения, электродвигатель, муфта, нити, подшипниковый узел и датчик силы. Вращение электродвигателя передается через муфту на нити, одни концы которых жестко закреплены в муфте, а другие жестко закреплены на рабочем органе для сообщения ему поступательного движения. Достигается обеспечение компактности. 3 ил.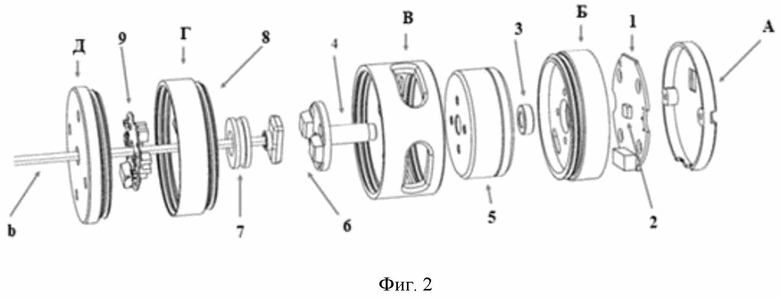
Мехатронный привод на скрученных нитях, содержащий корпус, представляющий собой единую сборку, в котором установлены последовательно драйвер электродвигателя, датчик положения, электродвигатель, муфта, нити, подшипниковый узел, датчик силы, при этом вращение электродвигателя передается через муфту на нити, один конец которых жестко закреплен в муфте, а другой присоединен к рабочему органу.
| МЕХАТРОННЫЙ ПРУЖИННЫЙ ПРИВОД | 2020 |
|
RU2742446C1 |
| US 2014066700 A1, 06.03.2014 | |||
| Станок с циркулярной пилой | 1928 |
|
SU15768A1 |
| Замок для соединения частей подвесной системы парашюта | 1939 |
|
SU61215A1 |

