Изобретение относится к сельскому хозяйству, в частности, к устройствам, предназначенным для орошения и химической обработки (в т.ч. прополки, внесения минеральных удобрений и средств защиты посевов от вредителей) полевых культур и культур, выращиваемых на чеках, плодовых, кустарников, деревьев и др.
Предлагаемым техническим решением обеспечивается: увеличение ширины охвата обрабатываемой площади посевов, чем имеют традиционные системы обработки и орошения; существенное увеличение производительности на единицу техники; работа на почвах с низкой несущей способностью без повреждения всходов растущих культур и нарушения плодородного слоя; работа на сложном рельефе местности, где растущие культуры расположены на наклонной или непрямолинейной поверхности (в том числе, горы, холмы, чеки, насыпи и т.п.); адресно точные (по необходимости и достаточности) объемы внесения рабочих жидкостей.
Актуальность изобретения
1. Интенсивность землепользования и увеличение роли агропродукции в ВВП развивающихся стран в настоящее время приводит к усилению роли химобработки посевов в повышении их урожайности. Так, в затратах на одну тонну сельскохозяйственной продукции средства защиты растений могут занимать 20-30%, а если год неблагоприятный, то и все 50% затрат на производство урожая культуры.
2. Глобальное потепление развивается с рекордной скоростью. Все более жаркое лето в разных областях планеты приводит к засухе, которая может продолжаться несколько лет подряд, например, в Калифорнии (США), рекордная за последние 1200 лет сушь длилась с 2011 по 2017 год. Сильная засуха, помимо вреда для агросектора, создает благоприятные условия для распространения огня, что приводит к катастрофическим пожарам в разных частях планеты: в Австралии, США, России и других странах.
Современные условия требуют все более интенсивного подхода к вопросу орошения угодий водой и минеральными удобрениями, предложения новых, более эффективных способов этой работы.
Описание технического решения изобретения
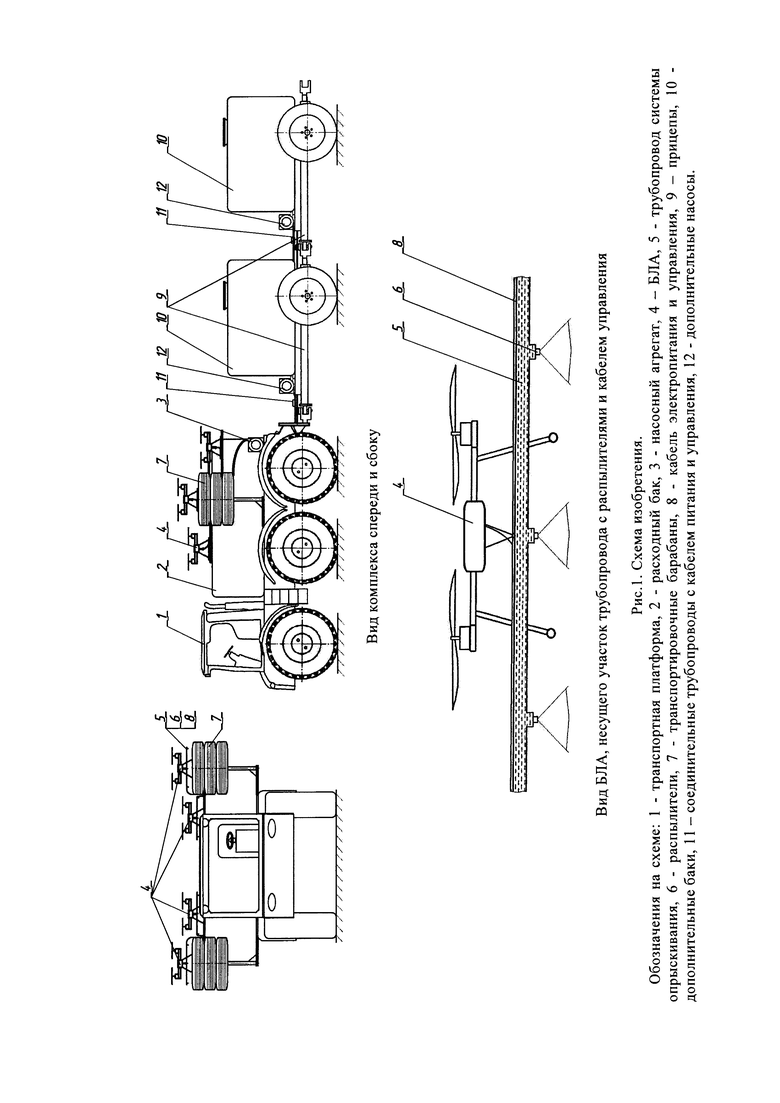
Техническое решение комплекса с автоматически летающими оросителями и опрыскивателями для химобработки агрокультур (на транспортной платформе) состоит из следующих компонентов:
(1) - база в виде трактора, пневмохода или иной транспортной платформы (управляемой водителем, дистанционно управляемой или беспилотной), по конструкции своего шасси оказывающая минимальное механическое воздействие на подстилающую поверхность и растительность обрабатываемого поля (без нарушения плодородного слоя). В качестве платформы могут применяться, например, пневмоходы различных марок или прицепы к ним, в том числе, уже имеющиеся в агрохозяйстве.
На такой платформе или на прицепе к ней устанавливаются:
(2) - расходный бак (или система из нескольких баков) для воды или жидких удобрений (далее - «жидкости», «рабочие жидкости»), насосный агрегат (3) для их нагнетания в трубопровод системы опрыскивания (5);
трубопровод (5) состоит из гибких шлангов, соединенных между собой и содержащих, помимо труб, также и расположенные на определенном расстоянии друг от друга распылители (6), имеющие электрическое управление распылом жидкостей и его отсечением, а также параллельно трубопроводу идет кабель (8) электропитания (от бортовой сети транспортной платформы) и управления (от системы управления комплексом), трубопровод с кабелем прикреплен к БЛА (4) через периодические расстояния, обеспечиваемые грузоподъемностью применяемых БЛА (например, через каждые 10 м трубопровода диаметром 3/4", в случае грузоподъемности БЛА 3 кг), трубопровод с кабелем имеет возможность намотки на транспортировочные барабаны (7) для компактной перевозки;
для транспортировки на базе транспортной платформы трубопровод сматывается на транспортировочные барабаны (7), на которых для всех БЛА предусмотрены площадки их базирования.
Для обеспечения большего эффекта и максимальной производительности комплекса, помимо одного прицепа (9) или одной транспортной платформы с баком жидкостей, к комплексу могут быть пристыкованы автопоездом дополнительные прицепы с баками (10), соединенные трубопроводами с кабелями питания и управления (11) между собой в единую систему. Количество прицепов ограничивается условием обеспечения движения автопоезда с необходимой для режима обработки скоростью, маневренностью и безопасностью. Перекачка жидкости между несколькими прицепами с соединенными баками и расходным баком может осуществляться дополнительными насосами, устанавливаемыми как на транспортной платформе, так и на прицепах (12), и управляемыми автоматически, по мере опорожнения расходного бака на платформе.
Количество БЛА с составе комплекса ограничивается возможностями энергосистемы транспортного средства и возможностями напорного насоса для обеспечения рабочего режима распыления жидкостей через форсунки опрыскивателя вдоль всего трубопровода. При этом для увеличения напора и компенсации потерь давления в длинном трубопроводе, на его концевых участках могут устанавливаться небольшие электронасосы подпора.
Отличительной особенностью используемых в комплексе баков для рабочей жидкости является их оснащение датчиками уровня находящейся в них жидкости, информация с датчиков передается в систему управления комплексом.
Эти прицепы могут заменяться по мере опустошения баков на аналогичные, заполненные рабочими жидкостями, путем подвоза их машиной снабжения, без ухода транспортного средства с опрыскивателями с рабочей траектории движения, уменьшая количество промежуточных остановок и возвращений на базу для заправки.
Пульт системы управления комплексом может быть размещен как на борту транспортной платформы, так и удаленно, в пункте размещения оператора комплекса, при этом система управления комплексом обладает следующими функциональными возможностями:
- планирование траектории движения комплекса по полю (параллельными колеями, расстояние между которыми определяется длиной трубопровода опрыскивателя с БЛА), с расчетом применяемых для обработки жидкостей в необходимом режиме обработки угодий, при этом на информационной панели (дисплее) эта траектория демонстрируется с отметками остановок комплекса по окончании жидкости в расходных баках, когда комплекс будет останавливаться для заправки новым объемом жидкости, или когда прицепы с баками в автопоезде будут меняться. Информация о скором окончании рабочей жидкости передается на базу размещения транспортной машины, для ее опережающей готовности к транспортировке и замене прицепов с опорожнившимися баками, исключая простои комплекса в ожидании их подвоза.
- иметь возможность автоматического задания режимов работы каждого опрыскивателя в системе по загруженной в систему картине вегетационных индексов растительности обрабатываемого поля, полученной ранее от аэро- или космической фотосъемки;
- индикацию на информационной панели (дисплее) водителю (или оператору) комплекса, какая площадь обработки была произведена и какая еще предстоит с указанным текущим расходом применяемой жидкости, сколько времени и какое расстояние по траектории движения осталось проехать до следующей остановки для заполнения расходных баков;
- заведение оператором при заправке бака и индикацию в процессе работы типа применяемых для обработки жидкостей, их объем на борту комплекса на момент заправки и их текущий объем во время работы;
- дистанционную связь между транспортной платформой и пунктом размещения удаленного оператора комплекса.
Конструкция беспилотных летательных аппаратов обладает следующими отличительными признаками:
- антикоррозионная защита всех элементов БЛА от применяемых в процессе работы жидкостей;
- наличие на борту каждого БЛА системы управления, позволяющей обеспечивать пилотирование и управление аппаратом в автономном режиме в пределах заданных нагрузок и ограничений; при этом, координирование своего положения относительно конструкции опрыскивателя и транспортировочных площадок на барабане система управления БЛА может обеспечивать автономно и без географической привязки к местности (по загруженной в систему геометрии трубопровода и отслеживаемому положению БЛА в процессе работы);
- система управления БЛА обеспечивает поддержание постоянства заданных высоты, направления и скорости полета, в зависимости от загруженного в систему рельефа местности и программы их полета по траектории движения комплекса;
- наличие связи бортовых систем управления БЛА с единой системой управления комплексом, в том числе, в целях развертывания системы в рабочий режим и свертывания ее в транспортировочный режим, а также контроля местоположения БЛА относительно транспортной платформы и транспортировочных барабанов.
Помимо указанной выше комплектации возможна совместная работа комплекса со штанговым опрыскивателем, размещенным на той же транспортной платформе. В этом случае трубопровод комплекса присоединяется к оконечному участку трубопровода штангового опрыскивателя и становится его расширителем охвата, работа при этом осуществляется обеими системами опрыскивания.
Известны следующие патенты в данной сфере:
1. Транспортное средство с опрыскивателем, содержащее; раму с двигателем, трансмиссией, подвеской колес с шинами сверхнизкого давления, кузов и штанговый опрыскиватель, кузов оснащен отсеком, в котором размещены бак опрыскивателя на подрамнике и насос (Патент на полезную модель RU №138934 МПК В60Р 3/00; A01G 25/09, 2014).
Недостатками данного транспортного средства с опрыскивателем являются: ограниченная ширина охвата площади обработки его штанговым опрыскивателем, ограниченный объем баков рабочей жидкости, в результате чего требуются значительные затраты времени и высокая трудоемкость его обслуживания.
Указанные недостатки обусловлены следующим. Заправку бака опрыскивателя рабочей жидкостью выполняют во время остановки транспортного средства с опрыскивателем. При этом прерывают выполнение технологического процесса - опрыскивание. Конструкция известного транспортного средства с опрыскивателем не позволяет совмещать заправку бака и опрыскивание. Это увеличивает затраты времени на обслуживание, уменьшая коэффициент использования времени смены, а значит снижая производительность опрыскивателя.
Расходуемая рабочая жидкость в баке опрыскивателя в процессе работы транспортного средства с опрыскивателем может закончится в поле в любом его месте. Для заправки бака рабочей жидкостью требуется выехать на край поля, а затем подъехать к месту заправки или передвижной агрегат для приготовления рабочих жидкостей должен подъехать к транспортному средству с опрыскивателем. Это также увеличивает затраты времени на обслуживание транспортного средства с опрыскивателем и трудоемкость его обслуживания.
Известное транспортное средство с опрыскивателем, выполняя технологическую операцию внесения удобрений или химических средств защиты растений, в процессе движения по полю ломает стебли растущих культур и уплотняет почву поля, что в конечном итоге снижает урожайность.
Оператор перемещается по полю во время обработки растений жидкими ядохимикатами. Поэтому необходима герметичная кабина для оператора или средства защиты органов дыхания оператора от воздействия ядохимикатов.
Потенциально возможную рабочую ширину известного опрыскивателя ограничивает прочностью конструкции горизонтального штангового распределяющего устройства, а значит и производительность опрыскивателя.
2. Известен летающий опрыскиватель в виде беспилотного летательного аппарата вертикального взлета и посадки, несущего полезную нагрузку в виде резервуара для жидкости и насадку для распыления жидкости из резервуара (Международная заявка №РСТ / CN 2015 / 080528, 01.06.2015 г., патент на изобретение US 2017043870 А1, 16.02.2017);
3. Известен похожий патент, описывающий транспортное средство с летающими опрыскивателями, содержащее: транспортное средство (трактор с прицепом с большим расходным баком), имеющее переднюю платформу с фронтальным баком, на которой размещаются беспилотные летательные аппараты вертикального взлета и посадки, являющиеся мобильными опрыскивателями, заправка внутренних баков которых происходит периодически при их возврате на платформу, и соединении с размещенным на передней платформе фронтальным баком (Патент на изобретение RU №2712710 МПК А01М 7/00, B64D 1/18);
4. Известен также патент, описывающий «Робототехнический комплекс для автоматизированной авиационной химической обработки растений и способ его применения» (Патент на изобретение RU №2586142 МПК А01М 7/00).
Эти летающие опрыскиватели имеют ряд недостатков, препятствующих их широкому промышленному использованию, а именно:
- малое время их работы, вызванное, с одной стороны, малым временем полета БЛА и. с другой стороны, малым возможным весом его полезной нагрузки (малым объемом его бака с рабочей жидкостью), ввиду чего БЛА часто возвращается для заправки, значительное время тратится непроизводительно и уходит на обслуживание БЛА (время на возврат на базу, заправку рабочей жидкостью, зарядку или замену аккумуляторов, возврат на рабочую траекторию полета), что ввиду частых повторений имеет значительную трудоемкость;
- ширина охвата летающего опрыскивателя также очень мала, относительно используемых наземных опрыскивателей, что приводит к большой частоте параллельных гонов вдоль обрабатываемого поля.
Оба этих недостатка приводят к низкой производительности летающего опрыскивателя.
Ввиду незрелости законодательства, регулирующего применение БЛА в гражданском хозяйстве, в настоящее время эксплуатация тяжелых БЛА (с взлетным весом более 30 кг) ограничена, что исключает практическую возможность нивелирования массово-геометрических ограничений летающих опрыскивателей путем увеличения их размера.
Настоящее изобретение близко по технической сущности и достигаемому результату широко распространенной сельскохозяйственной машине со штанговым опрыскивателем, перемещаемом на самой машине или на ее прицепе, где помимо опрыскивателя имеются расходные баки, насосный агрегат и вся необходимая обвязка для работы, но лишено ее недостатка, а именно: ограничения ширины охвата площади обработки и ее производительности, из-за больших затрат времени на ее обслуживание и большей трудоемкости, ввиду частых остановок на заправку рабочими жидкостями и траекторией движения с меньшим шагом (охватом) и меньшей скоростью, т.е. с более частыми гонами по полю, чем у предлагаемого в настоящем изобретении решения.
В случае необходимости оперативного проведения обработки большой площади угодий, по выше обозначенным причинам агропроизводители вынуждены единовременно применять несколько единиц техники с опрыскивателями.
В процессе эксплуатации широко распространенной сельскохозяйственной машины со штанговым опрыскивателем рабочая жидкость в расходном баке опрыскивателя периодически заканчивается, и ее работа останавливается, что может произойти в произвольном месте поля. Для заправки бака рабочей жидкостью требуется остановить работу, подъехать к месту заправки, или же к транспортному средству с опрыскивателем в поле должна подъехать передвижная заправочная емкость с ингредиентами для приготовления рабочих жидкостей, и произвести заправку рабочих баков сельскохозяйственной машины с опрыскивателем, после чего она может продолжить работу.
Для известных сельскохозяйственных транспортных средств с опрыскивателями эти операции приходится делать чаще, в связи с чем затраты времени на их обслуживание и трудоемкость обслуживания выше, чем для предлагаемого в настоящем изобретении решения.
С увеличением рабочей ширины захвата опрыскивателя увеличиваются размеры и масса необходимых для него штанг, увеличивается их прогиб. Во избежание неисправностей и поломок конструкции из-за ее прогиба и задевания за почву, концевые секции штанг опрыскивателя оборудуют дополнительными костыльными опорами, что делает конструкцию опрыскивателя менее маневренной, снижает скорость ее рабочего хода и ограничивает производительность.
Чем шире и тяжелее штанги опрыскивателя, тем транспортное средство с опрыскивателем больше уплотняет почву поля, что снижает урожайность обрабатываемых сельскохозяйственных культур.
Кроме этого известные сельскохозяйственные машины со штанговыми опрыскивателями нельзя использовать на сложном или холмистом рельефе местности, в горах.
Технический результат от внедрения изобретения формируется из нескольких факторов:
- обеспечение максимальной ширины охвата и площади единовременной обработки угодий, сравнимой со стационарными оросительными системами,
- снижение непроизводительных затрат времени на обслуживание транспортного средства с опрыскивателем,
- снижение площади механического воздействия на всходы от колес тяжелой сельскохозяйственной техники,
- экономия рабочих жидкостей, ввиду точного объема внесения удобрений, регулируемого определенной по картине распределения вегетационных индексов потребностью агрокультур, растущих на обрабатываемой площади,
- получение возможности обработки угодий со сложным рельефом местности, где растущие культуры расположены на наклонной или непрямолинейной поверхности (в том числе, горы, холмы, чеки, насыпи и т.п.).
Технический результат достигается тем, что расширение охвата площади опрыскивания и орошения угодий, а также работа со сложным рельефом местности, осуществляется при помощи автоматически летающих БЛА (сети из нескольких БЛА), несущих гибкий трубопровод системы опрыскивания, подключенный к транспортной платформе; снижение времени на обслуживание достигается применением автопоезда с подвозом рабочих жидкостей машиной снабжения, а экономия от точности внесения рабочих жидкостей - применением развитой системы управления комплексом, работающей с картами вегетационных индексов, которая управляет режимами работы распылителей, формирующих адресно точные (по необходимости и достаточности) объемы внесения рабочих жидкостей.
Сущность изобретения изображена на рис. 1, где на видах спереди и сбоку схематично показан комплекс на транспортной платформе с опрыскивателем; также показан БЛА в рабочем положении в полете, вид спереди, с участком трубопровода и работающими распылителями. На рис. 1 для большей ясности обобщенно представлены только те элементы, которые необходимы для понимания сущности технического решения, а известные специалистам в данной области вспомогательные детали - не показаны.
Алгоритм функционирования комплекса
Комплекс с автоматически летающими оросителями и опрыскивателями для химобработки агрокультур функционирует следующим образом.
К транспортной платформе в сборе с системой опрыскивания (насосный агрегат, трубопровод, барабаны, БЛА) присоединяются прицепы с дополнительными баками и весь автопоезд заправляется рабочей жидкостью (жидкостями). В системе управления по загруженной карте вегетационных индексов растительности обрабатываемых угодий и по заданиям агротехнической службы формируется программа с режимами работы распылителей и траектория движения комплекса.
Автопоезд комплекса выезжает к месту старта траектории обработки угодий. Оператор запускает рабочий режим системы управления комплекса.
Происходит предстартовая проверка компонентов системы и последовательный запуск и взлет беспилотных летательных аппаратов с постепенным разматыванием трубопровода до полного развертывания всей системы в рабочее положение, при этом все БЛА в полете выстраиваются в рабочую конфигурацию (по заданным расстояниям между друг другом и транспортной платформой, на необходимой высоте и азимуте от платформы).
Система управления проверяет и фиксирует начальное положение всех БЛА в развернутом состоянии, передает оператору на пульт управления сигнал о готовности к работе.
Оператор комплекса начинает движение транспортной платформы по запланированной рабочей траектории, вместе с ней с той же скоростью начинают лететь БЛА с трубопроводом, распылители производят опрыскивание площади.
В процессе движения происходит контроль траекторий полета и местоположения всех БЛА и их автоматическая корректировка при необходимости. Также происходит автоматический контроль траектории движения транспортной платформы с указанием оператору направлений ее корректировки при необходимости. В алгоритме системы управления имеется возможность работы с автономными транспортными платформами, в этом случае коррекция траектории движения выполняется системой управления движением автоматически.
В процессе перемещения транспортной платформы и БЛА, через развернутый трубопровод системы происходит опрыскивание (орошение) обрабатываемой площади.
По мере опорожнения баков автопоезда удаленному оператору системы приходят сообщения о необходимости через такое-то время обеспечить подвоз таких-то рабочих жидкостей в таком-то объеме. Он дает команду машине снабжения на подвоз жидкостей с базы (где хранятся ингредиенты для рабочих жидкостей и/или подготавливаются их растворы) к месту работы комплекса (где происходит отцепка от комплекса прицепов с опустошенными баками и присоединение заправленных). После замены прицепов процесс обработки угодий комплексом продолжается.
По завершении работы комплекса или при перемещении техники на другое поле для работы, беспилотные летательные аппараты последовательно возвращаются каждый на свою платформу со сматыванием трубопровода системы опрыскивания на барабаны. Комплекс возвращается в транспортировочное положение и перемещается на базу или другое поле для работы.
| название | год | авторы | номер документа |
|---|---|---|---|
| Транспортное средство с опрыскивателем | 2018 |
|
RU2712710C2 |
| Беспилотный авиационный робототехнический комплекс для внесения пестицидов | 2022 |
|
RU2779780C1 |
| МОБИЛЬНЫЙ КОМПЛЕКС ОБСЛУЖИВАНИЯ АГРОДРОНОВ | 2023 |
|
RU2805897C1 |
| БЕСПИЛОТНЫЙ КОМПЛЕКС ДЛЯ АВИАЦИОННО-ХИМИЧЕСКИХ РАБОТ | 2023 |
|
RU2817270C1 |
| Беспилотный привязной авиационный комплекс для внесения пестицидов и агрохимикатов в точном земледелии | 2020 |
|
RU2769411C1 |
| Способ ультрамалообъемного опрыскивания сельскохозяйственных растений и устройство для его осуществления с использованием беспилотных авиационных средств вертолетного типа | 2019 |
|
RU2730640C1 |
| РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС ДЛЯ АВТОМАТИЗИРОВАННОЙ АВИАЦИОННОЙ ХИМИЧЕСКОЙ ОБРАБОТКИ РАСТЕНИЙ И СПОСОБ ЕГО ПРИМЕНЕНИЯ | 2015 |
|
RU2586142C1 |
| Беспилотный летательный аппарат для обработки пестицидами пропашных культур | 2023 |
|
RU2808295C1 |
| Воздухоплавательный роботизированный аппарат для мониторинга и внесения средств защиты растений, удобрений в точном земледелии | 2019 |
|
RU2703198C1 |
| Беспилотный вертолет для внесения пестицидов, удобрений и других агрохимикатов в точном земледелии | 2021 |
|
RU2754790C1 |
Изобретение относится к сельскому хозяйству, в частности к устройствам, предназначенным для орошения и химической обработки полевых культур и культур. Комплекс с автоматически летающими оросителями и опрыскивателями - это гибкий трубопровод с кабелем управления и электропитания, с управляемыми распылителями, который в автоматическом режиме несут подключенные к нему один или несколько беспилотных летательных аппаратов вертикального взлета и посадки, размещаемые в транспортном положении на транспортной платформе и получающие от нее в процессе полета электропитание, рабочие жидкости и управляющие команды системы управления, обеспечивающий в целом автоматическое распыливание по обрабатываемой площади угодий адресных объемов рабочей жидкости, расходуемой из имеющихся на транспортной платформе и подсоединенных к ней на прицепах баков в процессе движения комплекса по заданной траектории. Обеспечивается увеличение ширины охвата обрабатываемой площади посевов, работа на почвах с низкой несущей способностью без повреждения всходов растущих культур и нарушения плодородного слоя. 1 ил.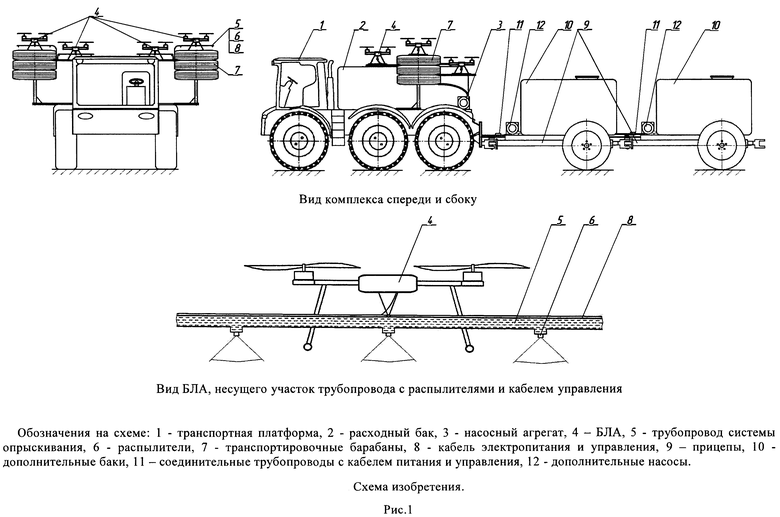
Комплекс с автоматически летающими оросителями и опрыскивателями - это гибкий трубопровод с кабелем управления и электропитания, с управляемыми распылителями, который в автоматическом режиме несут подключенные к нему один или несколько беспилотных летательных аппаратов вертикального взлета и посадки, размещаемые в транспортном положении на транспортной платформе и получающие от нее в процессе полета электропитание, рабочие жидкости и управляющие команды системы управления, обеспечивающий в целом автоматическое распыливание по обрабатываемой площади угодий адресных объемов рабочей жидкости, расходуемой из имеющихся на транспортной платформе и подсоединенных к ней на прицепах баков в процессе движения комплекса по заданной траектории.
| CN 105292474 A, 03.02.2016 | |||
| Транспортное средство с опрыскивателем | 2018 |
|
RU2712710C2 |
| Комплекс беспилотных летательных средств на базе аэростатического летательного аппарата | 2020 |
|
RU2734661C1 |
| РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС ДЛЯ АВТОМАТИЗИРОВАННОЙ АВИАЦИОННОЙ ХИМИЧЕСКОЙ ОБРАБОТКИ РАСТЕНИЙ И СПОСОБ ЕГО ПРИМЕНЕНИЯ | 2015 |
|
RU2586142C1 |
| WO 2014160589 A1, 02.10.2014. | |||

