Изобретение относится к авиационной технике, а именно к области беспилотных летательных аппаратов (БПЛА), используемых в сельском хозяйстве для авиационно-химических работ.
Известен «Моторизованный воздушный аппарат» (патент FR 2536366, МПК В64С 31/028, опубл. 25.05.1984), представляющий собой самолет традиционной аэродинамической системы и состоящий из двух складывающихся полукрыльев, связанных с несущим корпусом, двигателем, резервуарами, системами управления и распыления. Недостатками аппарата являются большой размах крыльев, что затрудняет взлет в условиях полевой эксплуатации, также расположение опрыскивателей под крылом на выносных штангах создает неблагоприятное аэродинамическое сопротивление и турбулентность, мешающие равномерному распределению химиката.
Известен «Комплекс для авиационных химических работ» (патент RU 2342284, МПК B64D1/18, опубл. 27.12.2008), который содержит автоматический летательный аппарат с размещенной на раме силовой установкой. Летательный аппарат выполнен в виде парашютного крыла, к которому на стропах подвешена гондола, являющаяся резервуаром жидкости для распыления. Гондола выполнена в виде жесткого крыла и расположена таким образом относительно точки подвеса, что при наличии груза имеет большой угол атаки набегающего воздушного потока, а при отсутствии меньший. Система навигации комплекса состоит из передающей стороны, выполненной в виде излучателей, установленных по углам обрабатываемого участка, и приемной стороны, оснащенной высотомером, системой датчиков и программно-управляющим устройством. Недостатком данного решения является то, что парашютное крыло имеет тенденцию к складыванию при турбулентности, а сложная система строп, обеспечивающая форму крыла, создает аэродинамическое сопротивление, что в комплексе значительно усложняет организацию автоматического управления. Кроме того, такое крыло необходимо поднимать с земли каждый рабочий цикл, что повышает риск его повреждения и увеличивает трудозатраты при обслуживании аппарата.
Наиболее близким к заявляемому изобретению является «Беспилотный дельталет» (патент RU 216314, МПК В64С31/028, B64D1/16, В64С39/02, опубл. 30.01.2023), используемый в сельском хозяйстве для авиационно-химических работ и мониторинга фитосанитарного состояния растительности. Беспилотный дельталет содержит мототележку, снабженную крылом с балансирным управлением, комплектом навесного химического оборудования с баком для вещества, силовой установкой, системой электрических сервоприводов, связанной с комплексом бортового оборудования с помощью цифровой линии связи. Система электрических сервоприводов осуществляет продольное и поперечное управление крыла с балансирным управлением. Комплекс бортового оборудования содержит навигационное оборудование, которое измеряет текущие параметры полета (географические координаты, воздушную скорость, барометрическую и абсолютную высоту полета, угловые скорости и угловое положение беспилотного дельталета в пространстве) и передает их с помощью проводной цифровой линии связи на вычислитель с установленным программным обеспечением, которое реализует алгоритмы автоматического, полуавтоматического и дистанционного управления, который в свою очередь, на основе полученных команд или полетного задания вычисляет управляющее воздействие и передает их на блок управления силовой установкой и систему сервоприводов.
К недостаткам данного изобретения можно отнести следующее. Летательный аппарат, управляемый балансирно, то есть изменением положения центра тяжести подвеса (тележки) с мотором, требует довольно мощных и быстрых, а следовательно, дорогих приводов управления. Также для балансирного управления характерно некоторое запаздывание реакции аппарата на команду управления (изменение угла крена/тангажа/рыскания), то есть изменять положение тележки относительно крыла необходимо с некоторым опережением относительно начала маневра, аналогично с окончанием маневра. Также на характеристики управления дельталета оказывает влияние вес подвеса, который уменьшается при расходовании распыляемого вещества, то есть «пустой» аппарат реагирует на управление быстрее, задержка в управлении меньше, и наоборот. Данный подход к реализации БПЛА для сельхозавиации имеет ограничения при масштабировании. Так, при массе полезной нагрузки более 300 кг управление балансирным методом становится крайне затрудненным из-за слишком больших потребных усилий, а также довольно медленным. Из-за этого создание более тяжелых летательных аппаратов по такой схеме невозможно.
Технической проблемой, решение которой обеспечивается при осуществлении предлагаемого изобретения, является низкая эффективность использования БПЛА при дифференцированной обработке агрохимикатами сельскохозяйственных полей и садовых насаждений в системе точного земледелия, недостаточная производительность и высокая стоимость авиационно-химических работ.
Техническим результатом заявляемого изобретения является повышение маневренности БПЛА для авиационно-химических работ, автоматизация процесса обработки, возможность целевой обработки сельскохозяйственных угодий, повышение производительности процесса, в том числе за счет уменьшения времени на подготовку и перебазировку комплекса, возможности работы в ночное время.
Технический результат достигается за счет того, что беспилотный комплекс для авиационно-химических работ, включающий управляющую станцию и беспилотный летательный аппарат, содержащий моторизированный каркас с шасси, комплект химического оборудования с баком для вещества, силовую установку с толкающим винтом, комплект бортового оборудования, согласно изобретению беспилотный летательный аппарат выполнен по схеме биплана-бесхвостки с верхним стреловидным крылом и нижним прямым крылом с элевонами, которое смещено относительно верхнего назад по полету, при этом соединяющие крылья концевые шайбы выполняют роль килей, а соединение консолей крыльев с концевыми шайбами и каркасом осуществляется через разъемные соединения.
В предлагаемом изобретении конструкция БПЛА представляет собой биплан-бесхвостку с толкающим винтом, что позволяет сохранить преимущества дельталета (компактность в сборе, простота сборки), но имеет явные преимущества перед ним - повышенную маневренность, лучшую управляемость, меньшие потери на сопротивление воздуха, а также более быструю сборку-разборку для транспортировки БПЛА и подготовки его к полету.
Предлагаемый биплан-бесхвостка имеет лучшую управляемость по сравнению с дельтапланом благодаря использованию аэродинамического, а не балансирного способа управления, а также имеет преимущества перед традиционными бипланами. Благодаря наличию верхнего (переднего) крыла с большим, чем у нижнего (заднего), установочным углом, при кабрировании срыв потока на нем начинается раньше. Из-за стреловидной формы срыв начинается у законцовок, плавно распространяясь по размаху с ростом угла атаки и давая время оператору или системе управления отреагировать. Если все же произошла потеря подъемной силы на верхнем крыле, самолет не сваливается в штопор, а совершает «клевок», переходя в управляемое пикирование и набор скорости, при этом нижнее (заднее) крыло все это время обдувается штатно. Это подтверждено испытаниями масштабных моделей изобретения. Биплан продолжает быть управляемым благодаря тому, что на нижнем крыле расположены дифференциально отклоняемые рулевые поверхности (элевоны), управляющие тангажом и креном. Таким образом, БПЛА по схеме биплана-бесхвостки является более безопасным и простым в управлении, его невозможно вывести на закритические углы атаки. Стабильность полета БПЛА и оперативность его управления позволяет повысить производительность, дистанцировать и автоматизировать процесс проведения авиационно-химических работ, минимизировать вероятность возникновения внештатных ситуаций.
Биплан-бесхвостка имеет хорошую маневренность благодаря малым моментам инерции за счет небольшого размаха консолей крыльев и возможности расположить двигатель и химический бак максимально близко к центру масс. Общая жесткость бипланной коробки позволяет уменьшить массу крыльев, отказаться от дополнительных тросов, растяжек и раскосов, характерных для мотодельтапланов, а также позволяет размещать распылители (опрыскиватели) не на штангах, параллельных крылу и находящихся под ним (такая схема часто используется в традиционных самолетах-опрыскивателях), а на нижнем крыле, что снижает общее сопротивление конструкции. Высокая маневренность БПЛА позволяет повысить точность дифференцированной обработки заданного участка агрохимикатами.
Малый размах крыльев биплана-бесхвостки позволяет осуществлять взлет в условиях полевой эксплуатации. Упрощается его перевозка автомобильным транспортом между полями и уменьшается время на подготовку БПЛА к полету, так как консоли крыльев демонтируются целиком, без их разборки, будучи соединены с корпусом благодаря разъемным соединениям. Заднее расположение винто-моторной группы позволяет значительно сократить затраты на ремонт БПЛА в случае его падения, является более безопасным для обслуживающего персонала. Беспилотный биплан-бесхвостка не требует дорогого и сложного обслуживания и специального аэродрома, может выполнять опрыскивание длительное время без снижения качества, в том числе работать ночью, когда опрыскивание наиболее выгодно из-за уменьшения испарения и отсутствия возмущений атмосферы. Это позволяет повысить общую производительность и снизить стоимость проведения авиационно-химических работ при использовании предлагаемого изобретения.
Беспилотный комплекс для авиационно-химических работ состоит из беспилотного биплана-бесхвостки и наземной управляющей станции с системой отслеживания текущего положения БПЛА и отображения обработанной зоны на дисплее.
Управляющая станция представляет собой программно-аппаратный комплекс, который может быть установлен в салоне или кузове автомобиля, осуществляющего транспортировку БПЛА.
Устройство предлагаемого беспилотного биплана-бесхвостки схематично представлено на фиг. 1. К фюзеляжу каркасного типа 1 крепятся трехстоечное шасси 2, двигатель с редуктором 3 и толкающим винтом 4, верхнее стреловидное крыло 5 и нижнее прямое крыло 6 с элевонами. Крылья соединены выполняющими роль килей концевыми шайбами 7. Каркас 1, консоли крыльев 5 и 6 и концевые шайбы 7 состыкованы между собой разъемными соединениями. На каркасе 1 размещено химическое оборудование для опрыскивания в виде блока управления, насосов, клапанов и бака 8 для рабочего вещества, на нижнем (заднем) крыле размещены опрыскиватели 9, соединенные с блоком управления и баком 8 соответствующей системой приводов и шлангов. Также на самолете установлено бортовое радиоэлектронное оборудование, включающее комплект датчиков, полетный контроллер, блок курсовых камер 10.
Изобретение осуществляется следующим образом.
Биплан транспортируют до поля в частично разобранном виде (консоли крыльев и концевые шайбы отсоединены от каркаса). Общий вес биплана и размер консолей крыльев относительно невелики, поэтому для его транспортировки не обязательно использование специального прицепа или дополнительных средств механизации. Биплан можно перевозить в кузове автомобиля, в котором расположена управляющая станция, или на верхнем (консоли) и заднем (фюзеляж) багажнике автомобиля, не нарушая действующих правил транспортировки негабаритных грузов. Сборка аппарата производится на месте перед работой.
Оператор, используя систему управления наземной станции, составляет план полета для оптимальной обработки поля с наиболее эффективным распределением химиката на основе имеющихся исходных данных, которые могут быть введены в систему как вручную, так и автоматически (в зависимости от возможностей программного обеспечения и поставленной задачи учитываются все параметры или часть из них):
- карта поля, на которой отмечены зоны дифференциального внесения химиката; трехмерная модель поля с указанием препятствий, высоты окружающих деревьев и т.д.; результаты NDVI съемки поля;
- метеоусловия, прогнозируемые и предшествующие опрыскиванию (например, количество выпавших накануне осадков, прогнозируемые ночные заморозки); актуальная скорость и направление ветра, давление, влажность, температура воздуха;
- тип обрабатываемой культуры; фаза вегетации; актуальная средняя высота обрабатываемой культуры;
- тип химиката, являющегося действующим веществом рабочей жидкости; характеристики рабочей жидкости (состав, вязкость, температура).
Взлет, проходы над полем со сбросом химиката, посадку БПЛА осуществляет оператор с наземной станции управления либо в режиме ручного дистанционного управления, либо в автоматическом режиме.
Система автоматического управления биплана, на основе данных от бортовых датчиков, способна поддерживать горизонтальный полет на заданной высоте над поверхностью поля, автоматически выполнять развороты для равномерного опрыскивания посевов, автоматически или в телеоператорном режиме производить посадку.
Подачу химиката и работу опрыскивателей, расположенных под нижним крылом, регулирует блок управления химическим оборудованием. Опрыскиватели могут быть вращающегося (например, атомайзеры) или спринклерного типа. Вращающиеся распылители могут иметь привод от набегающего потока воздуха при помощи крыльчатки или от собственных бесколлекторных моторов, питаемых аккумулятором, или приводиться от двигателя биплана механической, гидравлической или электрической передачей, что позволяет точно поддерживать и гибко регулировать частоту их вращения. Расход рабочей жидкости регулируется управляемыми клапанами или оборотами насосов. Информация о работе опрыскивателей и расходе рабочей жидкости предается на наземную управляющую станцию, что позволяет с использованием данных о скорости и высоте полета, температуре, влажности и ветре в реальном времени оценивать качество производимого опрыскивания. Это дает оператору (а также агроному, фермеру) возможность наблюдать опрыскивание в режиме онлайн, получая подтверждение, что химикат покрывает поле с запланированным расходом, и при необходимости оперативно вносить коррективы в план полета.
Использование системы автономного управления на основе данных с датчиков обеспечивает уверенную навигацию даже в темное время суток, когда влияние тепловых восходящих потоков в атмосфере минимально, равномерность опрыскивания выше, меньше непроизводительные затраты химиката, что повышает суточную производительность комплекса.
Предлагаемое изобретение также может быть использовано для мониторинга фитосанитарного состояния растительности, для лесоохраны и пожаротушения.
В настоящее время построена и успешно испытана масштабная модель биплана, подтверждающая требуемые характеристики по грузоподъемности, маневренности, скорости полета и точности дифференциальной обработки заданного участка.
| название | год | авторы | номер документа |
|---|---|---|---|
| УДАРНЫЙ АВИАЦИОННЫЙ КОМПЛЕКС С БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2022 |
|
RU2810821C1 |
| Малоразмерный беспилотный летательный аппарат | 2023 |
|
RU2812634C1 |
| ТЯЖЕЛЫЙ СКОРОСТНОЙ ВИНТОКРЫЛ | 2016 |
|
RU2608122C1 |
| БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2021 |
|
RU2754277C1 |
| АВИАКОМПЛЕКС БОЕВОЙ С БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2023 |
|
RU2816404C1 |
| Беспилотный летательный аппарат | 2023 |
|
RU2812164C1 |
| БЕСПИЛОТНЫЙ СКОРОСТНОЙ ВЕРТОЛЕТ, ДЕСАНТИРУЕМЫЙ С САМОЛЕТА-НОСИТЕЛЯ | 2016 |
|
RU2627975C2 |
| АВИАЦИОННО-РАКЕТНАЯ УДАРНАЯ СИСТЕМА | 2019 |
|
RU2721803C1 |
| БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2005 |
|
RU2288140C1 |
| СПОСОБ ФОРМИРОВАНИЯ МАЛОЗАМЕТНОЙ МОДУЛЬНОЙ БЕСПИЛОТНОЙ ЛЕТАТЕЛЬНОЙ СИСТЕМЫ | 2023 |
|
RU2829915C1 |

Изобретение относится к авиационной технике, а именно к области беспилотных летательных аппаратов (БПЛА), используемых в сельском хозяйстве для авиационно-химических работ. Беспилотный комплекс для авиационно-химических работ включает в себя наземную управляющую станцию и БПЛА, выполненный по схеме биплана-бесхвостки с толкающим винтом, верхним стреловидным крылом и смещенным относительно верхнего назад по полету нижним прямым крылом с элевонами. Соединяющие крылья концевые шайбы выполняют роль килей. Соединение консолей крыльев с концевыми шайбами и каркасом осуществляется через разъемные соединения. На БПЛА расположены химическое оборудование с баком для вещества и комплект бортового оборудования. Опрыскиватели размещены на нижнем крыле. БПЛА можно перевозить в частично разобранном виде в кузове автомобиля, в котором расположена управляющая станция. Обеспечивается повышение маневренности БПЛА при авиационно-химических работах, возможность целевой обработки сельскохозяйственных угодий, уменьшения времени на подготовку и перебазирование комплекса. 3 з.п. ф-лы, 1 ил.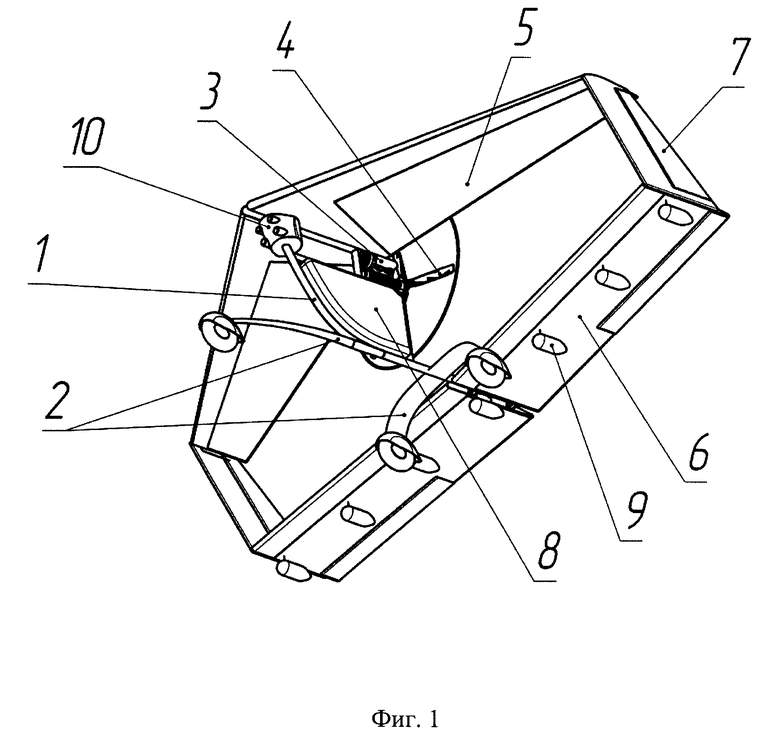
1. Беспилотный комплекс для авиационно-химических работ, включающий управляющую станцию и беспилотный летательный аппарат, содержащий моторизированный каркас с шасси, комплект химического оборудования с баком для вещества, силовую установку с толкающим винтом, комплект бортового оборудования, отличающийся тем, что беспилотный летательный аппарат выполнен по схеме биплана-бесхвостки с верхним стреловидным крылом и нижним прямым крылом с элевонами, которое смещено относительно верхнего назад по полету, при этом соединяющие крылья концевые шайбы выполняют роль килей, а соединение консолей крыльев с концевыми шайбами и каркасом осуществляется через разъемные соединения.
2. Беспилотный комплекс по п. 1, отличающийся тем, что распылители вещества размещены на нижнем крыле.
3. Беспилотный комплекс по п. 1, отличающийся тем, что выполнен с возможностью перевозки автотранспортом.
4. Беспилотный комплекс по п. 1, отличающийся тем, что управляющая наземная станция расположена в транспортном средстве для перевозки беспилотного летательного аппарата.
| Беспилотный авиационный робототехнический комплекс для внесения пестицидов | 2022 |
|
RU2779780C1 |
| Хедер для силосоуборочных комбайнов | 1959 |
|
SU125964A1 |
| СОЕДИНИТЕЛЬНЫЙ ПЛАШЕЧНЫЙ ЗАЖИМ | 2019 |
|
RU2704488C1 |
| Устройство для контроля уровня воды в открытых водоемах | 2018 |
|
RU2710898C1 |
| Бесхвостый самолет типа биплан | 1947 |
|
SU83032A1 |
