ОБЛАСТЬ ТЕХНИКИ
Это изобретение относится к приводам на основе электроактивного полимера.
ПРЕДПОСЫЛКИ СОЗДАНИЯ ИЗОБРЕТЕНИЯ
Электроактивные полимеры (ЭАП) представляют собой перспективный класс материалов в области электрочувствительных материалов. ЭАП могут работать как датчики или приводы, и при изготовлении им могут быть легко приданы различные формы, позволяющие простую интеграцию в разнообразие систем.
Были разработаны материалы с такими характеристиками, как механическое напряжение и деформация при приведении в действие, которые значительно улучшились за последние десять лет. Технологические риски были снижены до приемлемых уровней для разработки изделия, так что ЭАП становятся все более интересными в коммерческом и техническом плане. Преимущества ЭАП включают низкую мощность, небольшой форм-фактор, гибкость, бесшумную работу, точность, возможность высокого разрешения, быстрый отклик и циклическое приведение в действие.
Улучшенные характеристики и особые преимущества ЭАП-материалов приводят к применимости в новых приложениях.
ЭАП-устройство может использоваться в любом приложении, в котором желательна небольшая величина перемещения компонента или элемента на основе электрического приведении в действие. Аналогичным образом технология может использоваться для обнаружения небольших перемещений. Это изобретение относится, в частности, к приводам (актуаторам).
Использование ЭАП в приводных устройствах обеспечивает функции, которые не были возможны прежде, или предлагает большое преимущество перед обычными решениями для приводов благодаря комбинации относительно больших деформации и силы в небольшом объеме или тонком форм-факторе по сравнению с обычными приводами. ЭАП-приводы также обеспечивают бесшумную работу, точное электронное управление, быстрый отклик и большой диапазон возможных частот приведении в действие, такой как 0-1 МГц, чаще всего ниже 20 кГц.
Устройства, использующие электроактивные полимеры, могут быть подразделены на возбуждаемые полем и ионно-возбуждаемые материалы.
Примеры возбуждаемых полем ЭАП включают пьезоэлектрические полимеры, электрострикционные полимеры (такие как полимеры-релаксоры на основе ПВДФ) и диэлектрические эластомеры. Другие примеры включают электрострикционные привитые полимеры, электрострикционную бумагу, электреты, электровязкоупругие эластомеры и жидкокристаллические эластомеры.
Примерами ионно-возбуждаемых ЭАП являются сопряженные/проводящие полимеры, ионные полимер-металлические композиты (ИПМК) и углеродные нанотрубки (УНТ). Другие примеры включают ионные полимерные гели.
Это изобретение относится, в частности, к приводным устройствам, которые содержат возбуждаемый полем ЭАП-материал. Эти устройства приводятся в действие электрическим полем через прямую электромеханическую связь. Они требуют сильных полей (вольты на метр), но низких токов вследствие их емкостной природы. Полимерные слои обычно являются тонкими, поддерживая возбуждающее напряжение насколько возможно низким.
Первым примечательным подклассом возбуждаемых полем ЭАП являются пьезоэлектрические и электрострикционные полимеры. В то время как электромеханические характеристики традиционных пьезоэлектрических полимеров ограничены, прорыв в улучшении этих характеристик привел к полимерам-релаксорам на основе ПВДФ, которые проявляют самопроизвольную электрическую поляризацию (возбуждаемое полем выравнивание). Эти материалы могут предварительно деформироваться для улучшения характеристик в направлении деформации (предварительная деформация приводит к лучшему выравниванию молекул). Обычно используются металлические электроды, поскольку деформации как правило находятся в умеренном режиме (1-5%). Также могут использоваться другие типы электродов (такие как проводящие полимеры, масла, гели или эластомеры на основе сажи и т.д.). Электроды могут быть сплошными или сегментированными.
Другим подклассом возбуждаемых полем ЭАП является подкласс диэлектрических эластомеров. Тонкая пленка этого материала может быть помещена между эластичными электродами, образуя конденсатор с параллельными пластинами. В случае диэлектрических эластомеров напряжение Максвелла, вызванное приложенным электрическим полем, приводит к механическому напряжению на пленке, заставляя ее сжиматься по толщине и расширяться по площади. Деформационные характеристики как правило увеличиваются при предварительной деформации эластомера (требуя рамку для поддержания предварительной деформации). Деформации могут быть значительными (10-300%). Это также ограничивает тип электродов, которые могут использоваться: для слабых и умеренных деформаций могут рассматриваться металлические электроды и электроды из проводящего полимера, для режима сильных деформаций обычно используют масла, гели или эластомеры на основе сажи.
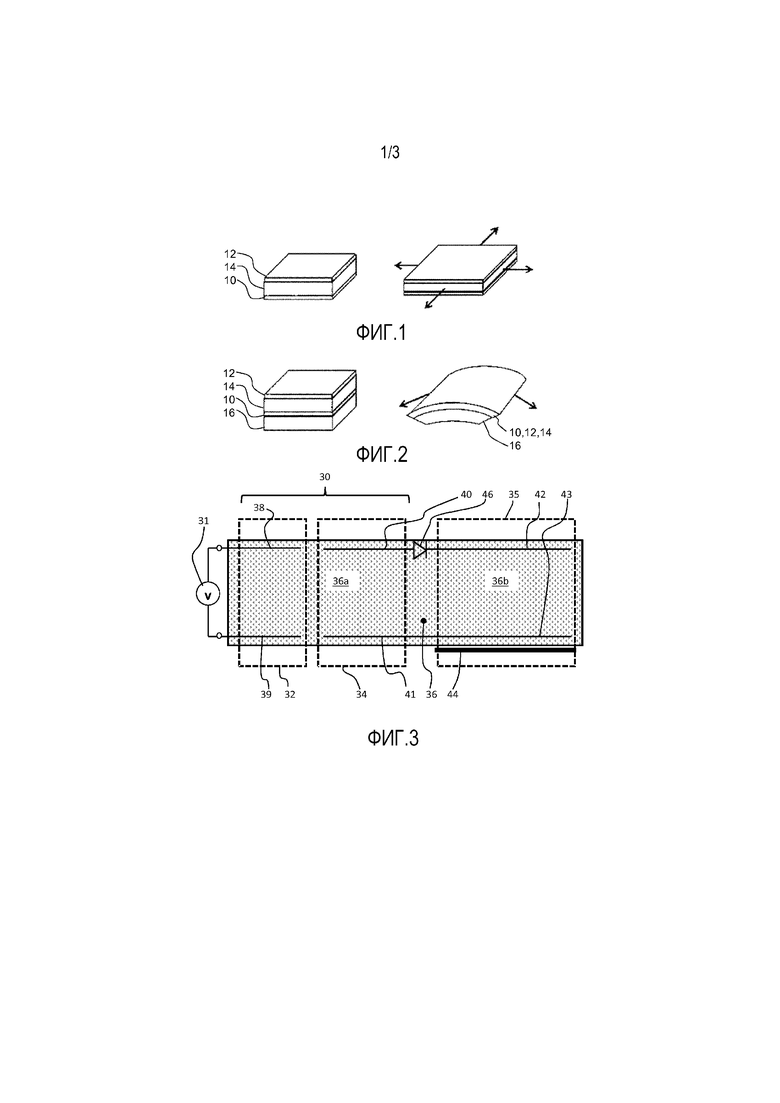
Фиг.1 и 2 показывают два возможных режима работы для ЭАП-устройства.
Устройство содержит слой 14 электроактивного полимера, помещенный между электродами 10, 12 на противоположных сторонах от слоя 14 электроактивного полимера.
Фиг.1 показывает устройство, которое не зажато. Чтобы заставить слой электроактивного полимера расширяться во всех направлениях, как показано, используется напряжение.
Фиг.2 показывает устройство, которое сконструировано таким образом, что расширение возникает только в одном направлении. Устройство поддерживается несущим слоем 16. Чтобы заставить слой электроактивного полимера изгибаться или сгибаться в дугу, используется напряжение.
Природа этого движения, например, является результатом взаимодействия между активным слоем, который расширяется при активировании (приведении в действие), и пассивным несущим слоем. Чтобы получить асимметричный изгиб вокруг оси, как показано, например, может быть применена молекулярная ориентация (растяжение пленки), вынуждающая к движению в одном направлении.
Расширение в одном направлении может являться результатом асимметрии в ЭАП-полимере или оно может являться результатом асимметрии в свойствах несущего слоя, или комбинации обеих.
Документ US 2007/216735 раскрывает струйную головку, которая использует пьезоэлектрический привод для выброса чернил. С приводом интегрирован пьезоэлектрический преобразователь.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Проблема возбуждаемых полем электроактивных полимеров состоит в том, что, как упомянуто выше, для достижения высоких напряженностей электрического поля в устройствах, чтобы реализовать желаемые отклонения, требуются довольно высокие рабочие напряжения. Для генерации этих высоких напряжений используются электронные схемы возбуждения. Для этих ЭАП требуются амплитуды напряжения возбуждения до 1 кВ, так что необходимо использовать и реализовывать устройства высокого напряжения, чрезвычайно увеличивая стоимость (и размер) электроники. Электроника для возбуждения и ЭАП-привод обычно локально отделены друг от друга, что приводит к использованию проводов подачи высокого напряжения между драйвером и приводом. Однако это может представлять собой проблему безопасности, например, в случае оборванных проводов, а также приводит к высоким, нежелательным (или даже недопустимым) электрическим и магнитным полям, а также электромагнитному излучению, которое может вызвать проблемы сертификации соответствия или даже может вредить пользователям.
Таким образом, существует потребность в конструкции ЭАП-привода, которая решает эти проблемы.
Задача изобретения состоит в удовлетворении, по меньшей мере частично, этой потребности. Изобретение охарактеризовано независимыми пунктами формулы изобретения, а зависимые пункты формулы изобретения предоставляют преимущественные варианты осуществления.
Примеры в соответствии с аспектом изобретения обеспечивают приводное устройство, содержащее:
привод на основе электроактивного полимера; и
пьезоэлектрический преобразователь, имеющий первичную сторону («обмотку») и вторичную сторону («обмотку»),
причем приводное устройство содержит слой пьезоэлектрического электроактивного полимера, содержащий первый участок и второй участок,
причем первый участок слоя электроактивного полимера образует часть вторичной стороны пьезоэлектрического преобразователя, а второй участок слоя электроактивного полимера образует часть привода на основе электроактивного полимера.
В этом приводном устройстве часть ЭАП-привода, которая не образует часть участка привода (вывода) устройства, используется для образования по меньшей мере части пьезоэлектрического преобразователя. Таким образом, требуемый возбуждающий сигнал высокого напряжения может быть сгенерирован локально с использованием интегрированного преобразователя высокого напряжения. Это имеет преимущества по затратам, предотвращает необходимость проводов подачи высокого напряжения, а также ослабляет воздействия электромагнитного излучения.
В одной совокупности возможных примеров первый участок слоя пьезоэлектрического электроактивного полимера также образует часть первичной стороны пьезоэлектрического преобразователя. Таким образом, общий ЭАП-слой используется в первичной стороне преобразователя, вторичной стороне преобразователя и частях привода всего устройства. Это обеспечивает недорогое решение с максимальной интеграцией.
Первый участок слоя пьезоэлектрического электроактивного полимера может иметь первую молекулярную ориентацию в первичной стороне и вторую, другую, молекулярную ориентацию во вторичной стороне. Таким образом, хотя используется общий слой, свойства могут быть адаптированы для достижения улучшенных характеристик преобразователя.
Например, первая молекулярная ориентация может быть в продольном направлении, простирающемся между пьезоэлектрическим преобразователем и приводом на основе электроактивного полимера, а вторая молекулярная ориентация может быть перпендикулярна плоскости слоя пьезоэлектрического электроактивного полимера (т.е. вертикальной).
В другой совокупности примеров, которые находятся в соответствии с изобретением, первичная сторона и вторичная сторона пьезоэлектрического преобразователя образованы из разных электроактивных полимерных материалов. По-прежнему имеется общий (совместно используемый) слой между вторичной стороной и приводом. Однако характеристики преобразователя могут быть улучшены путем использования разных материалов в первичной стороне и во вторичной стороне. Первичная сторона обеспечивает преобразование электрической энергии в механическую, а вторичная сторона обеспечивает преобразование механической энергии в электрическую. В этом устройстве могут использоваться различные типы технологии ЭАП.
Электроактивный полимерный материал первичной стороны пьезоэлектрического преобразователя, например, содержит предварительно деформированный диэлектрический эластомер.
Во всех примерах первичная сторона пьезоэлектрического преобразователя может содержать многослойный пакет. Это позволяет получить желаемый коэффициент преобразования. Привод на основе электроактивного полимера также может быть образован в виде многослойного пакета.
Между вторичной стороной пьезоэлектрического преобразователя и приводом на основе электроактивного полимера может быть электрически подключена диодная структура. Она функционирует как интегрированный выпрямитель и также может использоваться для обеспечения защиты от амплитуд высокого напряжения с нежелательной полярностью.
В слое пьезоэлектрического электроактивного полимера между вторичной стороной пьезоэлектрического преобразователя и приводом на основе электроактивного полимера может быть предусмотрена изоляционная область. Она может использоваться для обеспечения механического разъединения между преобразователем и приводом. В частности, может быть уменьшено демпфирование функции преобразователя при работе привода.
Изоляционная область может содержать одно или более отверстий в слое пьезоэлектрического электроактивного полимера и/или дополнительный промежуточный материал (границу раздела).
Пьезоэлектрический преобразователь может содержать совокупность компланарных элементов преобразователя. Таким образом, каждый элемент преобразователя может иметь желаемое отношение толщины к линейному измерению (в плоскости слоя). В частности, если в целях миниатюризации желательна небольшая толщина, использование нескольких (меньших по площади) компланарных элементов преобразователя поддерживает желаемое отношение толщины к размеру на плоскости. Это помогает поддержать высокую эффективность преобразователя.
Элементы преобразователя могут быть электрически подключены параллельно, причем их входы параллельны и их выходы параллельны, или последовательно, или в виде комбинации параллельных и последовательных элементов преобразователя.
Пьезоэлектрический преобразователь может быть гибким. Слой пьезоэлектрического электроактивного полимера, например, содержит поливинилиденфторид (ПВДФ) или поливинилиденфторид-трифторэтилен (ПВДФ-ТФЭ).
Примеры в соответствии с другим аспектом изобретения обеспечивают способ возбуждения привода на основе электроактивного полимера, включающий:
подачу сигнала возбуждения на пьезоэлектрический преобразователь, имеющий первичную сторону и вторичную сторону;
присоединение вторичной стороны пьезоэлектрического преобразователя к приводу электроактивного полимера с использованием общего слоя пьезоэлектрического электроактивного полимера таким образом, что первый участок слоя электроактивного полимера образует часть вторичной стороны пьезоэлектрического преобразователя, и второй участок слоя электроактивного полимера образует часть привода на основе электроактивного полимера; и
возбуждение привода на основе электроактивного полимера с использованием выходного сигнала от пьезоэлектрического преобразователя.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Примеры изобретения теперь будут описаны подробно со ссылкой на приложенные чертежи.
Фиг.1 показывает известное устройство на основе электроактивного полимера, которое не зажато;
Фиг.2 показывает известное устройство на основе электроактивного полимера, которое ограничено опорным слоем;
Фиг.3 показывает первый пример интегрированного ЭАП-привода и преобразователя;
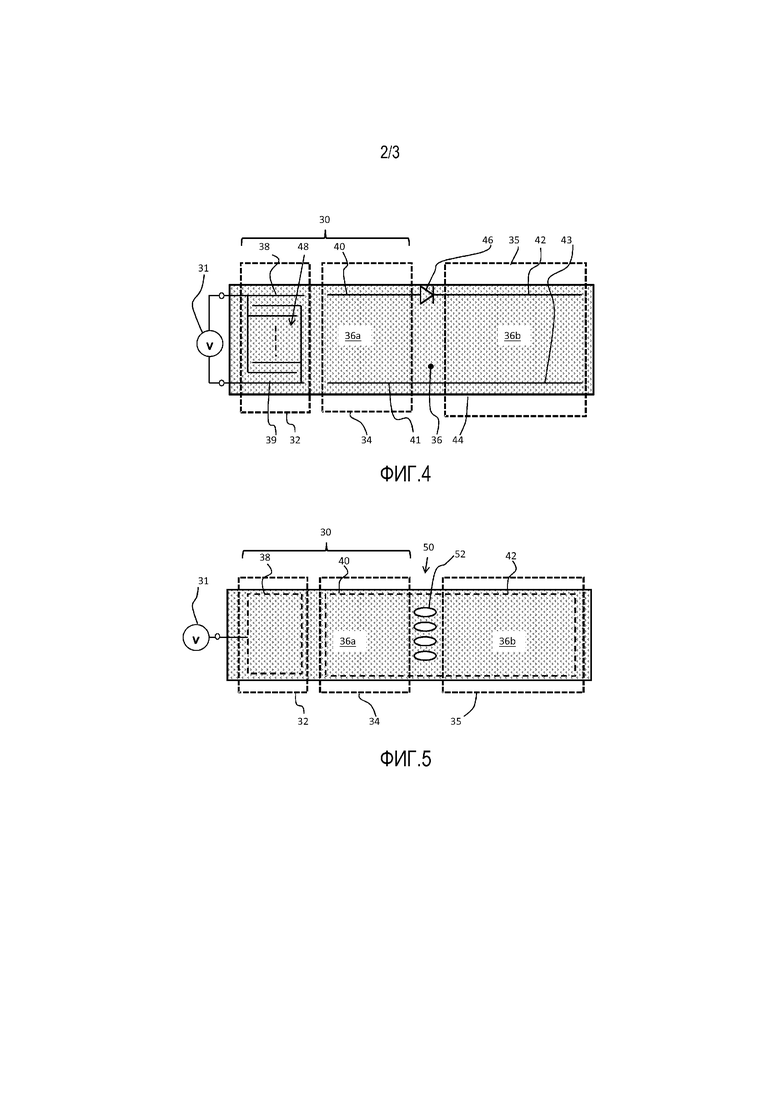
Фиг.4 показывает второй пример интегрированного ЭАП-привода и преобразователя;
Фиг.5 показывает третий пример интегрированного ЭАП-привода и преобразователя; и
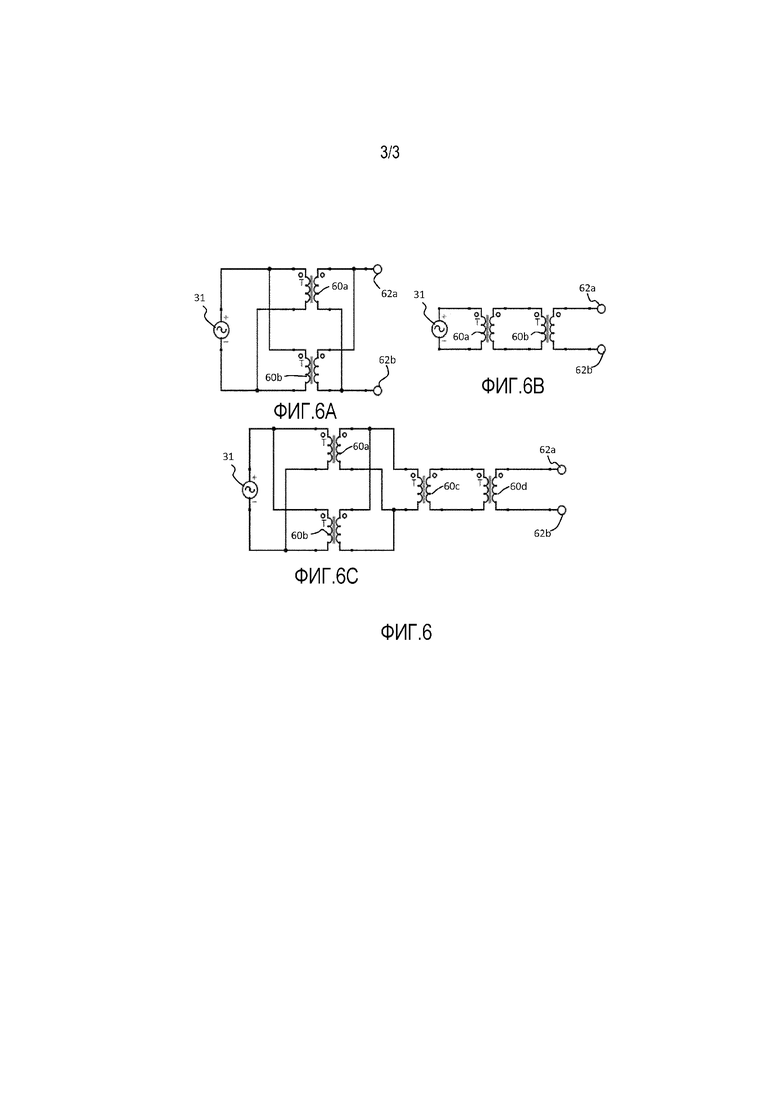
Фиг.6 показывает три возможных цепи преобразователя.
ПОДРОБНОЕ ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
Изобретение обеспечивает приводное устройство, которое имеет привод на основе электроактивного полимера и интегрированный пьезоэлектрический преобразователь. По меньшей мере вторичная сторона преобразователя совместно использует с приводом на основе электроактивного полимера слой пьезоэлектрического электроактивного полимера. Это обеспечивает устройство с интегрированным преобразователем, в результате чего на устройство могут подаваться меньшие внешние напряжения.
В общих чертах возбуждаемые полем приводы на основе электроактивного полимера (ЭАП) состоят из электрически изолирующего материала, встроенного между двумя электрически проводящими электродами. В зависимости от приложенного напряжения электрическое поле между электродами вызывает механическую деформацию ЭАП. Как разъяснено выше, при использовании дополнительных материалов с разными коэффициентами относительного удлинения (например, жесткостью) для ЭАП-слоя механическая деформация может быть направлена в определенных направлениях. При реализации многослойной технологии напряженность поля между электродами может быть увеличена, и, следовательно, для приведения в действие ЭАП-привода требуются меньшие амплитуды напряжения, или могут быть реализованы большие механические деформации. Эта базовая конфигурация очень похожа на электрический многослойный конденсатор.
Пьезоэлектрический преобразователь (также известный как диэлектрический преобразователь) является другим известным пассивным устройством, которое может использовать как многослойные, так и однослойные технологии. В зависимости от конфигурации могут быть сгенерированы очень высокие напряжения, например, в диапазоне нескольких киловольт с очень высокой эффективностью, например, более 90%. Такие преобразователи могут быть образованы в виде плоских устройств для использования в плоских приложениях, где имеется недостаточно пространства для традиционных магнитных трансформаторов.
Недостатком известных пьезоэлектрических преобразователей (трансформаторов) является их жесткость и хрупкость, вызванные обычно используемым керамическим материалом. По этой причине они как правило встраиваются в гибкие (например, силиконовые) держатели. В дополнение к механической защитной функции эта мягкая и гибкая встроенная конструкция позволяет механическую вибрацию преобразователя. Это уменьшает механическое демпфирование, которое снизило бы эффективность. Приложенное электрическое поле на первичной стороне (на основе приложенного входного напряжения) вызывает деформирование первичной стороны. Первичная и вторичная стороны механически соединены как единое интегрированное устройство, так что механическая первичная деформация связана со вторичной стороной устройства. Механическая деформация генерирует электрическое поле снова, вызывая падение напряжения на подключенной нагрузке.
С эксплуатационной точки зрения можно рассмотреть разные моды колебаний устройства. Наиболее распространенными являются поперечная, продольная, толщинная, планарная или радиальная моды, а также их комбинация. Обычно преобразователи типа Rosen используют комбинацию поперечной и продольной мод колебаний. Также известны устройства, которые основаны на толщинной и радиальной модах колебаний.
Коэффициент трансформации (преобразования) напряжения от первичной стороны до вторичной стороны в основном зависит от форм-фактора, длины (l) и высоты (d) (т.е. толщины) компонента, а также числа внутренних слоев первичной стороны (n) и вторичной стороны. Характеристики зависят от нескольких параметров материалов и конструкции, как известно специалисту в данной области техники. Кроме того, с точки зрения электротехники, выходное напряжение также проявляет зависимость от частоты работы (ω=2 π f) и условий нагрузки.
Изобретение использует слой пьезоэлектрического ЭАП для образования по меньшей мере части слоя электромеханического преобразования у преобразователя. Тот же самый слой затем образует по меньшей мере часть преобразователя (вторичную сторону), а также ЭАП-привод.
Фиг.3 показывает первый пример приводного устройства. Устройство показано в поперечном сечении в вертикальной плоскости. Оно содержит единое интегрированное устройство, которое объединяет пьезоэлектрический преобразователь 30, имеющий первичную сторону 32 и вторичную сторону 34, с приводом 35 на основе электроактивного полимера.
На входе преобразователя находится источник 11 переменного напряжения.
И частота работы, и коэффициент преобразования преобразователя зависят от конструкции преобразователя и могут быть настроены. Типичными значениями для имеющегося в продаже пьезоэлектрического преобразователя являются частота 85 кГц и коэффициент преобразования 50.
Обычно частота может находиться в диапазоне от нескольких кГц до нескольких сотен кГц, например, от 10 кГц до 100 кГц. Коэффициент преобразования напряжения находится, например, в диапазоне от 1 (обеспечение только изоляции и преобразования импеданса) до 1000, например, в диапазоне 10-100.
В показанном примере имеется единственный слой 36 электроактивного полимера, который содержит первый участок 36a, который простирается по первичной и вторичной сторонам преобразователя 30, и второй участок 36b, который простирается по приводу 35.
Каждая сторона преобразователя содержит участок слоя 36 пьезоэлектрического электроактивного полимера, помещенный между верхним и нижним электродами. Первичная сторона 32 имеет верхний электрод 38 и нижний электрод 39, и вторичная сторона 34 имеет верхний электрод 40 и нижний электрод 41. Привод 35 на основе электроактивного полимера имеет верхний электрод 42 и нижний электрод 43.
Первый участок 36a слоя электроактивного полимера таким образом образует часть пьезоэлектрического преобразователя, а второй участок 36b слоя электроактивного полимера образует часть привода 35 на основе электроактивного полимера.
В ЭАП-приводе 35 показан несущий слой 44 для управления или ограничения перемещения ЭАП-привода 35. Безусловно, он может простираться по всему устройству.
Пьезоэлектрический преобразователь таким образом реализован с использованием пьезоэлектрического ЭАП-слоя 36 (слоя пьезоэлектрического ЭАП). Требуется, чтобы ЭАП-слой 36 был пьезоэлектрическим по меньшей мере во вторичной стороне 34 преобразователя для обеспечения требуемого преобразования механической энергии в электрическую. Таким образом, пример по фиг.3 использует единственный полимерный материал, который является пьезоэлектрическим. В качестве примера могут использоваться ПВДФ или ПВДФ-ТФЭ или другие пьезоэлектрические полимеры.
Преимущество использования в преобразователе ЭАП-материала, в дополнение к интеграции с приводом, состоит в том, что устраняется базовый недостаток керамического пьезоэлектрического преобразователя, который представляет собой его хрупкость. Таким образом, возможные применения расширяются, и возможные формы менее ограничены (например, керамические пьезоэлектрические преобразователи в общем случае ограничены прямоугольными профилями и в общем случае высотой по меньшей мере 2 мм). Могут быть изготовлены более тонкие преобразователи, но тогда они являются еще более хрупкими. Преобразователь на основе ЭАП, наоборот, может представлять собой гибкое облегченное устройство, которое может быть легко сконструировано в любой произвольной форме, такой как изогнутая конструкция. Он также может иметь высоту лишь нескольких сотен микрометров.
Желаемые размеры (на виде сверху) будут зависеть от некоторых реализаций параметров и конструкций, таких как свойства материала и число слоев. Также очень важна пропускная способность по мощности/энергии, которая соотносится со скоростью переноса заряда (в сочетании с напряжением). Это вновь относится к выбранным свойствам и объему материала. Также важными являются высота (т.е. толщина) компонента, а также ширина и длина.
ЭАП являются маломощными компонентами, и соответственно перенос энергии является низким по своей природе. Например, стандартный ЭАП, приводимый в действие крутым прямоугольным импульсом 200 В, требует пиковой мощности примерно лишь 230 мВт. После полного приведения в действие к работе в стационарном (установившемся) состоянии требуемая мощность находится в низком милливаттном режиме (чтобы компенсировать внутренние потери).
Показатель диапазона подходящих размеров может быть получен на основе требуемых характеристик. Например, для достижения поставляемой пиковой мощности, в ЭАП должна быть подана энергия 2,1 мВт·с (например, в течение периода времени около 20 мс). Линеаризация этой энергии дает в результате среднюю энергию ½*2,1 мВт·с=1,05 мВт·с, которая должна быть поставлена преобразователем.
На основе ссылки «Biomedical Applications of EAPs»; F. Carpi, E. Smelal; Wiley; p.327 известно, что плотность энергии материала П(ВИФ-ТФЭ-ХФЭ), который является подходящим кандидатом для материала преобразователя, составляет 1,22 Вт·с/см3. Для сравнения плотность энергии стандартного керамического PZT (пьезоэлектрического преобразователя) составляет лишь 0,1 Вт·с/см3.
Таким образом, в этом примере требуется объем 1,05 мВт·с*1 см3/1,22 Вт·с=0,0009 см3, т.е. приблизительно 1 мм3.
Для поперечных размеров одна часть обмотки преобразователя может занимать 10 мм x 10 мм. Это приводит к высоте в диапазоне 10 мкм (исключая электроды). Таким образом, весь преобразователь (и первичная, и вторичная стороны) имеет размеры порядка 20 мм x 10 мм x 0,01 мм.
Это лишь иллюстрация, чтобы показать, что требуемый размер преобразователя находится в диапазоне размера активной части ЭАП-привода (даже если взять небольшую толщину 10 мкм) и, следовательно, не увеличивает высоту такого привода.
Желательно, чтобы функция приведения в действие не влияла на работу преобразователя, например, на коэффициент преобразования. Таким образом, движение ЭАП-привода должно быть изолировано от преобразователя. Это может быть обеспечено путем ограничения механически неактивной части ЭАП-слоя 36 между преобразователем и ЭАП-приводом, например, за счет области без какого-либо покрывающего слоя, тогда как такой покрывающий слой (с разными коэффициентами механического расширения) используется в ЭАП-приводе. Это показано на фиг.3, где несущий слой 44 используется только в ЭАП-приводе 35. Однако механическая деформация, вызываемая приведением в действие привода, обычно обеспечивает уменьшенную толщину слоя, что, в свою очередь (выгодно), увеличивает коэффициент преобразования напряжения преобразователя на основе ЭАП.
Эти проблемы могут быть приняты во внимание в конструкции всего устройства.
На одной или на обеих сторонах устройства также может быть обеспечен дополнительный слой для улучшения механической связи между первичной и вторичной сторонами преобразователя. Для обеспечения предпочтительного направления механической деформации могут использоваться дополнительные более жесткий слой или слои.
Для уменьшения дополнительного демпфирования функции преобразователя, вызываемого этим более жестким слоем, внутренние стороны на границе раздела между дополнительным более жестким слоем и преобразователем могут быть подготовлены для уменьшения трения, например, с использованием поверхностей с низким трением или уменьшающей трение текучей средой, такой как масло.
Для первичной стороны преобразователя желательна сильная деформация с достаточной механической энергией для переноса ко вторичной стороне. Для вторичной стороны желателен сильный пьезоэлектрический эффект. Существует несколько способов улучшить характеристики по сравнению с единственным однородным ЭАП-слоем на преобразователе, такой как использование полимера-релаксора ПВДФ.
Первая модификация представляет собой использование управляемой молекулярной ориентации в первичной и вторичной сторонах. Выбранная молекулярная ориентация увеличит электромеханическую связь (k). Например, первичная сторона может иметь молекулярную ориентацию в продольном (горизонтальном) направлении, что приводит к предоставлению большей механической энергии вторичной стороне. Вторичная сторона может иметь молекулярную ориентацию в вертикальном направлении. Более высокое значение коэффициента связи приведет к большей степени преобразования в электрическую энергию.
Вторая модификация представляет собой использование двух разных материалов, одного для первичной стороны и одного для вторичной стороны. Первичная сторона, например, может использовать предварительно деформированный диэлектрический эластомер (например, акриловый), имеющий большую механическую энергию и большой коэффициент связи, или полимер-релаксор ПВДФ. Конструкция выбирается для оптимизации преобразования из электрической в механическую энергию.
Использование разных материалов может быть комбинировано с выбором разных молекулярных ориентаций.
Вторичная сторона тогда может содержать материал, который приводится в резонанс первичной стороной, исходя из относительно сильного пьезоэлектрического эффекта, например, пьезоэлектрический полимер (пленка), пьезоэлектрический сополимер или полимер-релаксор ПВДФ с низким содержанием ХФЭ/ХТФЭ. Во вторичной стороне вследствие их высокого пьезоэлектрического эффекта могут использоваться сегнетоэлектрики (сегнетоэлектреты).
Первичная сторона 32 преобразователя 30 может использовать многослойный пакет 48, как показано на фиг.4, механически соединенный с однослойной вторичной стороной 34. Многослойная структура 46 в первичной стороне означает, что к внутренним слоям прикладываются поля очень высокой напряженности, вызывая большие механические деформации как первичной, так и механически связанной вторичной стороны.
Многослойный пакет 48 содержит более тонкие ЭАП-слои, каждый из которых предусмотрен между парой электродных слоев, и при этом слои уложены в пакет с электродами чередующейся полярности. Таким образом, необходима только одна пара сигналов возбуждения, и расположенные чередующимися слоями гребни электродов обеспечивают возбуждение нескольких слоев. Деформация во вторичной стороне приводит к формированию электрического поля еще более высокой напряженности на выходных выводах устройства и соответствующим образом коррелированного электрического напряжения.
Преобразователь 30 не требует каких-либо жестких слоев и может оставаться полностью гибким. На первичную сторону преобразователя подается низкое напряжение, которое затем преобразуется и подается на активный ЭАП-привод 35. Эта компоновка особенно эффективна для миниатюрных приводов.
Если требуется рабочее напряжение постоянного тока (dc) (вместо импульсного режима работы), между вторичной стороной преобразователя и ЭАП-приводом может быть введен выпрямительный диод.
Фиг.4 (а также фиг.3) также показывает выход вторичной стороны, выпрямляемый простым диодом 46, который подсоединен между электродом 40 вторичной стороны и электродом 42 ЭАП-привода. В дополнение к функции выпрямления диод обеспечивает защиту привода от нежелательных амплитуд высокого напряжения с противоположной полярностью относительно желаемой полярности возбуждения. Тогда в ЭАП-привод может быть введен разрядный вывод (не показан).
Существуют разные возможные режимы работы привода, и для некоторых из них диод может быть необходим, а для других нет.
В импульсном режиме работы привод может использоваться для создания коротких (не статических) механических отклонений. В этом случае диод между вторичной стороной преобразователя и приводом не требуется. Для поддержания механического отклонения могут использоваться высокочастотные импульсы, хотя это может внести потери и привести к нагреванию и температурному дрейфу.
В режиме стационарного состояния привод может быть механически отклонен, и может требоваться поддержание его состояния в течение периода времени. Если подается только единственный импульс, механическое отклонение изменится со временем. В этом случае используется напряжение возбуждения постоянным током (DC), и используется диод. Секция преобразователя работает только со входом при непостоянном токе (синусоидальная или импульсная форма сигнала). Таким образом, напряжение непостоянного тока во вторичной стороне выпрямляется диодом. Собственная емкость привода также будет сглаживать сигнал.
Чтобы увеличить механическую деформацию ЭАП-привода 35, в ЭАП-приводе 35 также может использоваться многослойная методика, как разъяснено в связи с первичной стороной 32 преобразователя. Это увеличивает напряженность электрического поля и таким образом вызывает большие отклонения.
Преобразователь может быть (частично) поляризован для улучшения характеристик преобразования напряжения. Любая поликристаллическая керамика состоит из множества случайно ориентированных кристаллов (диполей), и объемные свойства являются суммой свойств этих кристаллитов. При изготовлении пьезоэлектрической керамики подходящему сегнетоэлектрическому материалу сначала придается желаемая форма и на него наносят электроды. Затем пьезоэлектрический элемент нагревается до температуры Кюри: температуры, выше которой прекращают существование самопроизвольная поляризация и пьезоэлектрический эффект. Нагревание выполняется в присутствии сильного поля постоянного тока. Это поляризует керамику (т.е. выравнивает диполи молекул керамики в направлении приложенного поля). Поле поляризации остается «замороженным» на месте, когда температура становится ниже точки Кюри и удаляется приложенное поле. Чем больше число выровненных доменов, тем больше пьезоэлектрический эффект.
Путем соответствующей поляризации первичной и вторичной сторон пьезоэлектрического преобразователя (причем идеальное направление диполей зависит от принципа выбранного преобразователя) может быть очень хорошо увеличена эффективность.
Механическая связь между преобразователем и ЭАП-приводом за счет совместно используемого ЭАП-слоя означает, что приведение в действие привода может влиять на функцию преобразователя, как упомянуто выше.
Фиг.5 показывает один подход для ослабления механической связи между преобразователем 30 и ЭАП-приводом 35. Показан вид сверху (без диода). Соединение между вторичной стороной 34 преобразователя и областью ЭАП-привода включает изоляционную область 50. В показанном примере изоляционная область содержит набор вертикальных отверстий 52, которые уменьшают эффект механического демпфирования за счет ЭАП-привода на преобразователе. Отверстия не должны быть вертикальными. Действительно, для обеспечения функции изоляции может использоваться любая ослабляющая структура.
Вместо использования отверстий для изоляционной области 50 вторичная сторона преобразователя и ЭАП-привод могут быть соединены дополнительной границей раздела в форме мягкого материала для ослабления механической связи. Этот материал, например, может заполнять еще большие отверстия в ЭАП-слое.
Наибольшее разъединение может быть достигнуто при разделении ЭАП-слоя на два отдельных участка, соединенных проводами или слоями электродов и собранных на суб-носителе (например, на гибкой печатной плате или фольге). В этом случае ЭАП-слой является прерывистым, но он по-прежнему образован в виде частей общего полного слоя. Другими словами, одинаковый тип ЭАП-слоя 36 образован для преобразователя (вторичная сторона) и привода.
Одно преимущество использования ЭАП в качестве материала преобразователя является интеграция функций преобразователя и привода, как описано выше. Чтобы оптимизировать характеристики преобразователя, отношение толщины к длине (или ширине) преобразователя не должно быть слишком низким. Если оно будет слишком низким, то значительно уменьшатся эффективность и коэффициент усиления по напряжения преобразователя. Преимущество ЭАП-материалов состоит в том, что они могут быть обработаны, например, способами печати или вытягиванием пленки, в очень тонкие слои, обычно тоньше, чем керамические материалы. Это имеет два преимущества.
Во-первых, число внутренних слоев первичной стороны может быть увеличено для заданной толщины вторичной стороны, увеличивая коэффициент усиления по напряжению.
Во-вторых, может быть уменьшена общая толщина устройства. Это второе преимущество позволяет миниатюризацию преобразователя, как описано выше. Однако отношение толщины к длине (или ширине) преобразователя должно оставаться достаточно большим. Это может быть достигнуто путем разделения преобразователя на массив элементов преобразователя за счет структурирования электродов в массив преобразователей типа Розена.
Фиг.6A показывает два элемента 60a, 60b преобразователя, соединенных параллельно. Источник 31 напряжения параллельно подключен ко входам обоих элементов преобразователя, и они оба параллельно соединены с выходом 62a, 62b. Параллельное соединение обеспечивает конструкцию преобразователя с более высоким током.
Фиг.6B показывает два элемента 60a, 60b преобразователя, соединенных последовательно, причем выход первого элемента 60a преобразователя образует вход второго элемента 60b преобразователя, а выход второго элемента 60b преобразователя соединяется с выходом 62a, 62b преобразователя. Последовательное соединение обеспечивает конструкцию преобразователя с более высоким коэффициентом трансформации по напряжению.
Фиг.6C показывает комбинацию последовательного и параллельного соединений с двумя параллельными элементами 60a, 60b и двумя последовательными элементами 60c, 60d.
Вышеописанное интегрированное устройство позволяет уменьшить требуемое входное напряжение для устройства, повышая безопасность компонента и улучшая электромагнитные характеристики. Устройство может быть чрезвычайно плоским и гибким, не требуя каких-либо соединений высокого напряжения. Кроме того, могут использоваться более низкие частоты возбуждения, уменьшая потери в электронике для возбуждения по сравнению с керамическими пьезоэлектрическими преобразователями. Преобразователь также вносит гальваническую изоляцию между ЭАП-приводом и источником питания.
Материалы, подходящие для ЭАП-слоя, известны.
Первичная сторона преобразователя может использовать любой материал, имеющий желаемую функцию преобразования электрической энергии в механическую. Материал для вторичной стороны является пьезоэлектрическим материалом, обеспечивающим требуемое преобразование механической энергии в электрическую.
Электроактивные полимеры включают, но не ограничены этим, подклассы: пьезоэлектрические полимеры, электромеханические полимеры, сегнетоэлектрические полимеры-релаксоры, электрострикционные полимеры, диэлектрические эластомеры, жидкокристаллические эластомеры, сопряженные полимеры, ионные полимер-металлические композиты, ионные гели и полимерные гели.
Подкласс электрострикционные полимеры включает, но не ограничен этим:
Поливинилиденфторид (ПВДФ), поливинилиденфторид-трифторэтилен (ПВДФ-ТФЭ), поливинилиденфторид-трифторэтилен-хлорфторэтилен (ПВДФ-ТФЭ-ХФЭ), поливинилиденфторид-трифторэтилен-хлортрифторэтилен) (ПВДФ-ТФЭ-ХТФЭ), поливинилиденфторид-гексафторпропилен (ПВДФ-ГФП), полиуретаны или их смеси.
Подкласс диэлектрические эластомеры включает, но не ограничен этим:
акрилаты, полиуретаны, силиконы.
Подкласс сопряженные полимеры включает, но не ограничен этим:
полипиррол, поли-3,4-этилендиокситиофен, поли(п-фенилен сульфид), полианилины.
Ионные устройства могут быть основаны на ионных полимер-металлических композитах (ИПМК) или сопряженных полимерах. Ионный полимер-металлический композит (ИПМК) представляет собой синтетический композитный наноматериал, который отражает поведение искусственных мышц при приложенном напряжении или электрическом поле.
Более конкретно ИПМК состоят из ионного полимера, такого как Nafion или Flemion, на поверхности которого путем химического или физического нанесения покрытия нанесены проводники, такие как платиновые или золотые электроды, или электроды на основе углерода. Под приложенным напряжением перенос и перераспределение ионов вследствие поданного напряжения на полоску из ИПМК приводят к деформации изгиба. Полимер представляет собой мембрану из набухающего при растворении ионообменного полимера. Поле вызывает перемещение катионов на сторону катода вместе с водой. Это приводит к реорганизации гидрофильных кластеров и к расширению полимера. Деформация в области катода приводит к механическому напряжению в остальной части полимерной матрицы, приводящему к изгибу в сторону анода. Изменение полярности приложенного напряжения инвертирует направление изгиба.
Если нанесенные электроды размещены в несимметричной конфигурации, наложенное напряжение может вызвать все виды деформаций, такие как извивание, свертывание, скручивание, накручивание и несимметричную деформацию изгиба.
Во всех этих примерах для влияния на электрическое и/или механическое поведение слоя ЭАП в ответ на приложенное электрическое поле могут быть предусмотрены дополнительные пассивные слои.
ЭАП-слой каждого блока может быть помещен между электродами. Электроды могут быть растягиваемыми, так что они следуют за деформацией слоя ЭАП-материала. Материалы, подходящие для электродов, также известны и, например, могут быть выбраны из группы, состоящей из тонких металлических пленок, таких как золотые, медные или алюминиевые, или органические проводники, такие как сажа, углеродные нанотрубки, графен, полианилин (PANI), поли(3,4-этилендиокситиофен) (PEDOT), например, поли(3,4-этилендиокситиофен)поли(стиролсульфонат) (PEDOT:PSS). Также могут использоваться металлизированные пленки из сложного полиэфира, такие как металлизированный полиэтилентерефталат (PET), например, с использованием алюминиевого покрытия.
Изобретение может быть применено во многих применениях ЭАП- и фотоактивных полимеров, включая примеры, в которых интерес представляет пассивный матричный массив приводов.
Во многих применениях основная функция изделия основана на (локальной) манипуляции человеческой тканью или приведении в действие поверхностей контакта с тканью. В таких применениях ЭАП-приводы, например, предоставляют уникальные преимущества, главным образом благодаря небольшому форм-фактору, гибкости и высокой плотности энергии. Следовательно, ЭАП- и фоточувствительные полимеры могут быть легко интегрированы в мягкие, трехмерные и/или миниатюрные изделия и интерфейсы. Примерами таких применений являются:
Косметический уход за кожей, например, приборы стимуляции кожи в форме кожных накладок на основе реагирующего на воздействие полимера, которые придают коже постоянное или циклическое растяжение, чтобы натянуть кожу или уменьшить морщины.
Дыхательные устройства с маской для взаимодействия с пациентом, которая имеет активную подушку или уплотнение на основе реагирующего на воздействие полимера, обеспечивающую переменное нормальное давление на кожу, что сокращает или предотвращает красные пятна на лице.
Электрические бритвы с адаптивной бреющей головкой. Высота поверхностей контакта с кожей может регулироваться с использованием приводов из реагирующего на воздействие полимера для влияния на баланс между близостью и раздражением.
Приборы для очистки полости рта, такие как воздушная зубная нить с приводом динамического сопла для улучшения проникновения струи, особенно в промежутках между зубами. В качестве альтернативы зубные щетки могут быть снабжены активированными пучками.
Устройства бытовой электроники или сенсорные панели, которые обеспечивают локальную тактильную обратную связь через массив преобразователей на основе реагирующего на воздействие полимера, который (массив) интегрирован в пользовательский интерфейс или находится рядом.
Катетеры с направляемым кончиком для упрощения навигации в извилистых кровеносных сосудах.
Измерения физиологических параметров человеческого тела, таких как частота сердцебиения, SpO2 и кровяное давление.
Другая категория соответствующего применения, которая извлекает выгоду от таких приводов, относится к модификации света. Оптические элементы, такие как линзы, отражающие поверхности, дифракционные решетки и т.д., могут быть выполнены адаптивными по форме или с адаптацией позиции с использованием этих приводов. В этом случае одним преимуществом ЭАП является, например, более низкое энергопотребление.
Вышеприведенные примеры основаны на преобразователе, работающем на основе поперечной моды, с электрической изоляцией между первичной стороной и вторичной стороной. Однако возможны также преобразователи на основе другой моды колебаний. Ко вторичной стороне также могут быть добавлены внутренние электроды. Первичная сторона может использовать единственный слой или многослойную структуру. Первичная и вторичная стороны могут быть привязаны к общему потенциалу.
Один аспект изобретения относится к использованию разных ЭАП-материалов для первичной и вторичной сторон преобразователя. Существуют другие аспекты, которые не требуют этого признака.
Общими признаками изобретения являются приводное устройство, содержащее:
привод (35) на основе электроактивного полимера; и
пьезоэлектрический преобразователь (30), имеющий первичную сторону (32) и вторичную сторону (34),
причем приводное устройство содержит слой (36) пьезоэлектрического электроактивного полимера, содержащий первый участок (36a) и второй участок (36b),
причем первый участок (36a) слоя электроактивного полимера образует часть вторичной стороны (34) пьезоэлектрического преобразователя, а второй участок (36b) слоя электроактивного полимера образует часть привода (35) на основе электроактивного полимера.
Формирование первичной стороны (32) и вторичная сторона (34) пьезоэлектрического преобразователя из разных электроактивных полимерных материалов является одним конкретным аспектом.
Второй аспект состоит в том, что между вторичной стороной (34) пьезоэлектрического преобразователя и приводом (35) на основе электроактивного полимера электрически подключена диодная структура (46).
Третий аспект состоит в том, что элементы преобразователя электрически подключены параллельно, причем их входы параллельны и их выходы параллельны, или последовательно, или в виде комбинации параллельных и последовательных элементов преобразователя.
Эти второй и третий аспекты не требуют разных материалов для первичной и вторичной сторон. Например, первый участок (36a) слоя пьезоэлектрического электроактивного полимера также может образовывать часть первичной стороны (32) пьезоэлектрического преобразователя. Первый участок (36a) слоя пьезоэлектрического электроактивного полимера, например, имеет первую молекулярную ориентацию в первичной стороне (32) и вторую, другую, молекулярную ориентацию во вторичной стороне (34). Первая молекулярная ориентация может быть в продольном направлении, простирающемся между пьезоэлектрическим преобразователем и приводом на основе электроактивного полимера, а вторая молекулярная ориентация перпендикулярна плоскости слоя пьезоэлектрического электроактивного полимера.
Следует отметить, что эти другие аспекты могут быть объединены с другими признаками, такими как гибкая конструкция, изоляционная область и слоистая конструкция.
Специалисты в данной области техники смогут понять и выполнить другие изменения в раскрытые варианты осуществления при осуществлении заявленного изобретения на практике на основе изучения чертежей, раскрытия и приложенной формулы изобретения. В формуле изобретения слово «содержит» не исключает другие элементы или этапы, а единственное число не исключает множества. Сам факт, что некоторые меры изложены во взаимно различных зависимых пунктах формулы изобретения, не указывает на то, что не может использоваться с преимуществом комбинация этих мер. Любые ссылочные позиции в формуле изобретения не должны истолковываться как ограничивающие объем.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ПРИВОДА, ИМЕЮЩЕЕ В СВОЕМ СОСТАВЕ ЭЛЕКТРОАКТИВНЫЙ ПОЛИМЕРНЫЙ ПРИВОД, И СПОСОБ УПРАВЛЕНИЯ | 2017 |
|
RU2737790C2 |
| ЭАП-ПРИВОД И СПОСОБ ВОЗБУЖДЕНИЯ | 2017 |
|
RU2750680C2 |
| ДАТЧИКИ НА ОСНОВЕ ЭЛЕКТРОАКТИВНЫХ ПОЛИМЕРОВ И СПОСОБЫ ВОСПРИЯТИЯ | 2016 |
|
RU2723887C2 |
| УСТРОЙСТВО ПРИВОДА, ИМЕЮЩЕЕ В СВОЕМ СОСТАВЕ ЭЛЕКТРОАКТИВНЫЙ ПОЛИМЕРНЫЙ ПРИВОД, И СПОСОБ УПРАВЛЕНИЯ | 2017 |
|
RU2737791C2 |
| УСТРОЙСТВО МОЛОКООТСОСА | 2017 |
|
RU2754631C2 |
| УСТРОЙСТВО ПРИВОДА И СПОСОБ | 2017 |
|
RU2749570C2 |
| СЕНСОРНОЕ УСТРОЙСТВО И СПОСОБ ИЗМЕРЕНИЯ ФИЗИОЛОГИЧЕСКОГО ПАРАМЕТРА | 2017 |
|
RU2750352C2 |
| АКТУАТОРНОЕ УСТРОЙСТВО НА ОСНОВЕ ЭЛЕКТРОАКТИВНОГО ПОЛИМЕРА | 2017 |
|
RU2737789C2 |
| ПРИВОДНОЕ И СЕНСОРНОЕ УСТРОЙСТВО НА ОСНОВЕ ЭЛЕКТРОАКТИВНОГО ПОЛИМЕРА | 2016 |
|
RU2721302C2 |
| ЭЛЕКТРОАКТИВНЫЙ ПОЛИМЕРНЫЙ ПРИВОД | 2017 |
|
RU2736009C2 |
Использование: для привода на основе электроактивного полимера. Сущность изобретения заключается в том, что приводное устройство содержит: привод на основе электроактивного полимера и пьезоэлектрический преобразователь, имеющий первичную сторону и вторичную сторону, причем приводное устройство содержит слой пьезоэлектрического электроактивного полимера, содержащий первый участок и второй участок, причем первый участок слоя электроактивного полимера образует часть вторичной стороны пьезоэлектрического преобразователя, а второй участок слоя электроактивного полимера образует часть привода на основе электроактивного полимера, причем первичная сторона и вторичная сторона пьезоэлектрического преобразователя образованы из разных электроактивных полимерных материалов. Технический результат: обеспечение возможности подачи более низких внешних напряжений. 2 н. и 11 з.п. ф-лы, 6 ил.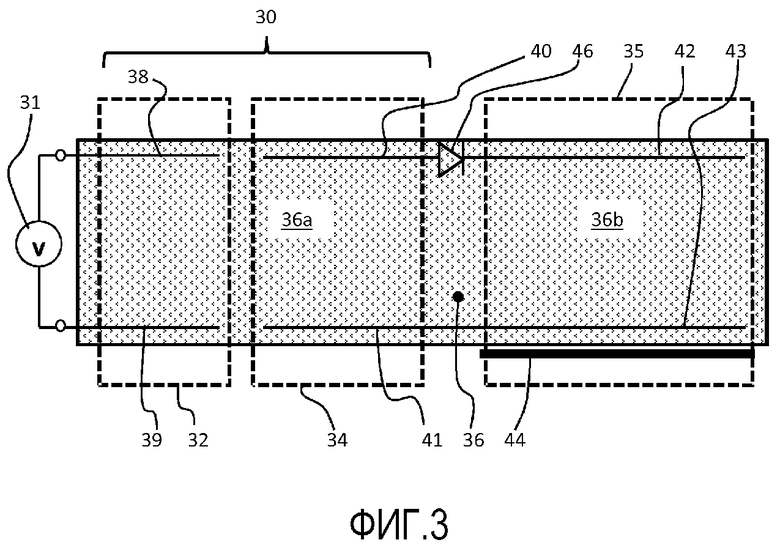
1. Приводное устройство, содержащее:
привод (35) на основе электроактивного полимера; и
пьезоэлектрический преобразователь (30), имеющий первичную сторону (32) и вторичную сторону (34),
причем приводное устройство содержит слой (36) пьезоэлектрического электроактивного полимера, содержащий первый участок (36a) и второй участок (36b),
причем первый участок (36a) слоя электроактивного полимера образует часть вторичной стороны (34) пьезоэлектрического преобразователя, а второй участок (36b) слоя электроактивного полимера образует часть привода (35) на основе электроактивного полимера,
причем первичная сторона (32) и вторичная сторона (34) пьезоэлектрического преобразователя образованы из разных электроактивных полимерных материалов.
2. Устройство по п. 1, в котором электроактивный полимерный материал первичной стороны (32) пьезоэлектрического преобразователя содержит предварительно деформированный диэлектрический эластомер.
3. Устройство по п. 1 или 2, в котором слой пьезоэлектрического электроактивного полимера первичной стороны имеет первую молекулярную ориентацию, а слой пьезоэлектрического электроактивного полимера вторичной стороны имеет другую молекулярную ориентацию.
4. Устройство по п. 3, в котором первая молекулярная ориентация находится в продольном направлении, простирающемся между пьезоэлектрическим преобразователем и приводом на основе электроактивного полимера, а вторая молекулярная ориентация перпендикулярна плоскости слоя пьезоэлектрического электроактивного полимера.
5. Устройство по любому предыдущему пункту, в котором первичная сторона (32) пьезоэлектрического преобразователя и/или привод (35) на основе электроактивного полимера содержит многослойный пакет.
6. Устройство по любому предыдущему пункту, содержащее диодную структуру (46), электрически подключенную между вторичной стороной (34) пьезоэлектрического преобразователя и приводом (35) на основе электроактивного полимера.
7. Устройство по любому предыдущему пункту, содержащее изоляционную область (50), предусмотренную в слое пьезоэлектрического электроактивного полимера между вторичной стороной (34) пьезоэлектрического преобразователя и приводом на основе электроактивного полимера.
8. Устройство по п. 7, в котором изоляционная область (50) содержит одно или более отверстий (52) в слое пьезоэлектрического электроактивного полимера и/или дополнительный промежуточный материал.
9. Устройство по любому предыдущему пункту в котором пьезоэлектрический преобразователь (30) содержит набор компланарных элементов (60, 60b, 60c, 60d) преобразователя.
10. Устройство по п. 9, в котором упомянутые элементы преобразователя электрически подключены параллельно, причем их входы параллельны и их выходы параллельны, или последовательно, или в виде комбинации параллельных и последовательных элементов преобразователя.
11. Устройство по любому предыдущему пункту, в котором пьезоэлектрический преобразователь (30) является гибким.
12. Устройство по любому предыдущему пункту, в котором слой (36) пьезоэлектрического электроактивного полимера содержит поливинилиденфторид (ПВДФ) или поливинилиденфторид-трифторэтилен (ПВДФ-ТФЭ).
13. Способ возбуждения привода (35) на основе электроактивного полимера, включающий этапы, на которых:
подают сигнал возбуждения на пьезоэлектрический преобразователь (30), имеющий первичную сторону (32) и вторичную сторону (34), причем первичная сторона (32) и вторичная сторона (34) пьезоэлектрического преобразователя образованы из разных электроактивных полимерных материалов;
соединяют вторичную сторону (34) пьезоэлектрического преобразователя с приводом (35) на основе электроактивного полимера, используя общий слой (36) пьезоэлектрического электроактивного полимера таким образом, что первый участок (36a) слоя электроактивного полимера образует часть вторичной стороны (34) пьезоэлектрического преобразователя, а второй участок (36b) слоя электроактивного полимера образует часть привода (35) на основе электроактивного полимера; и
возбуждают привод (35) на основе электроактивного полимера, используя выходной сигнал от пьезоэлектрического преобразователя (30).
| US 2007216735 A1, 20.09.2007 | |||
| US 6404107 B1, 11.06.2002 | |||
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ПРИВОД | 1998 |
|
RU2223574C2 |
| Пьезоэлектрический клапан | 1989 |
|
SU1823918A3 |
| Пьезоэлектрический привод | 1990 |
|
SU1800575A1 |

