ОБЛАСТЬ ТЕХНИКИ
Это изобретение относится к электроактивным полимерным приводам.
УРОВЕНЬ ТЕХНИКИ
Электроактивные полимеры (ЭАП) представляют собой перспективный класс материалов в области электрочувствительных материалов. ЭАП могут работать как датчики или приводы, и при изготовлении им могут быть легко приданы различные формы, позволяющие простую интеграцию в разнообразные системы.
Были разработаны материалы с характеристиками, такими как механическое напряжение и деформация активации привода, которые значительно улучшились за последние десять лет. Технологические риски были снижены до допустимых уровней для разработки продукта, и ЭАП приобрели возрастающий интерес в коммерческом и техническом плане. Преимущества ЭАП включают в себя малую мощность, миниатюрный форм-фактор, гибкость, бесшумную работу, точность, возможность высокого разрешения, быстрый отклик и циклическую активацию привода.
Улучшенные рабочие характеристики и особые преимущества материалов ЭАП служат основанием для их пригодности для новых применений.
ЭАП-устройство может использоваться в любом применении, в котором желательным является небольшая величина перемещения компонента или элемента на основе электрической активации привода. Аналогичным образом, технология может использоваться для обнаружения малых движений. Это изобретение относится, в частности, к приводам.
Использование ЭАП в устройствах привода делает возможными функции, которые не были возможны прежде, или предлагает большое преимущество перед обычными решениями для приводов благодаря комбинации относительно большой деформации и силы в небольшом объеме или тонком форм-факторе по сравнению с обычными приводами. Приводы ЭАП также обеспечивают бесшумную работу, точное электронное управление, быстрый отклик и большой спектр возможных частот активации привода, такой как 0-1 МГц, как правило ниже 20 кГц.
Устройства, использующие электроактивные полимеры, могут быть подразделены на управляемые полем и ионно-управляемые материалы.
Примеры управляемых полем ЭАП включают в себя пьезоэлектрические полимеры, электрострикционные полимеры (такие как полимеры-релаксоры на основе PVDF) и диэлектрические эластомеры. Другие примеры включают в себя электрострикционные привитые полимеры, электрострикционную бумагу, электреты, электровязкоупругие эластомеры и жидкокристаллические эластомеры.
Примерами ионно-управляемых ЭАП являются сопряженные/проводящие полимеры, ионные полимер-металлические композиты (IPMC) и углеродные нанотрубки (CNT). Другие примеры включают в себя ионные полимерные гели.
Это изобретение относится, в частности, к устройствам привода, которые заключают в себе управляемый полем материал ЭАП. Эти устройства приводятся в действие электрическим полем через прямую электромеханическую связь. Они требуют высоких полей (вольты на метр), но низкий ток вследствие их емкостной природы. Полимерные слои обычно являются тонкими, чтобы поддерживать управляющее напряжение насколько возможно низким.
Первым примечательным подклассом управляемых полем ЭАП, являются пьезоэлектрические и электрострикционные полимеры. В то время как электромеханические рабочие характеристики традиционных пьезоэлектрических полимеров ограничены, прорыв в улучшении этих рабочих характеристик привел к полимерам-релаксорам PVDF, которые проявляют самопроизвольную электрическую поляризацию (управляемое полем выравнивание). Эти материалы могут быть предварительно деформированы для улучшения рабочих характеристик в направлении деформации (предварительная деформация приводит к более хорошему молекулярному выравниванию). Обычно используются металлические электроды, поскольку деформации обычно находятся в умеренном режиме (1-5%). Также могут использоваться другие типы электродов (такие как проводящие полимеры, масла, гели или эластомеры на основе сажистого углерода и т.д.). Электроды могут быть непрерывными или сегментированными.
Другим подклассом управляемых полем ЭАП является подкласс диэлектрических эластомеров. Тонкая пленка этого материала может быть помещена между гибкими электродами, формируя конденсатор с параллельными пластинами. В случае диэлектрических эластомеров напряжение Максвелла, вызванное приложенным электрическим полем, приводит к напряжению на пленке, заставляя ее сжаться по толщине и расшириться по площади. Рабочие характеристики деформации, как правило, увеличиваются посредством предварительной деформации эластомера (требуется рамка для поддержания предварительной деформации). Деформации могут быть значительными (10-300%). Это также ограничивает тип электродов, которые могут использоваться: для низких и умеренных деформаций могут рассматриваться металлические электроды и проводящие полимерные электроды, для режима высоких деформаций обычно используются масла, гели или эластомеры на основе сажистого углерода.
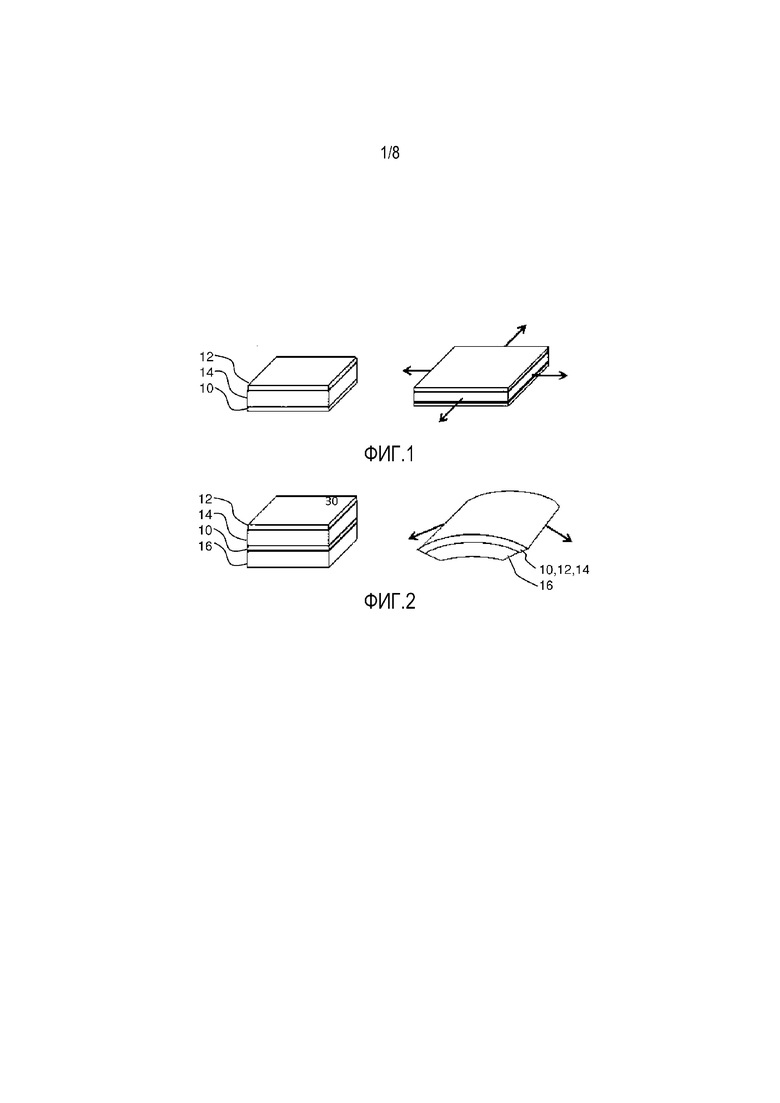
Фиг. 1 и 2 показывают два возможных режима работы для ЭАП-устройства.
Устройство содержит электроактивный полимерный слой 14, помещенный между электродов 10, 12 на противоположных сторонах электроактивного полимерного слоя 14.
Фиг. 1 показывает устройство, которое не зажато. Напряжение используется, чтобы заставить электроактивный полимерный слой расширяться во всех направлениях, как показано.
Фиг. 2 показывает устройство, которое сконструировано таким образом, что расширение возникает только в одном направлении. Устройство поддерживается несущим слоем 16. Напряжение используется, чтобы заставить электроактивный полимерный слой изгибаться или наклоняться.
Природа этого движения, например, является результатом взаимодействия между активным слоем, который расширяется, когда активируется, и пассивным несущим слоем. Чтобы получить асимметричный изгиб вокруг оси, как показано, может быть применена молекулярная ориентация (растяжение пленки), вынуждающая к движению в одном направлении.
Расширение в одном направлении может являться результатом асимметрии в полимере ЭАП, или оно может являться результатом асимметрии в свойствах несущего слоя, или комбинации обеих.
Проблема управляемых полем электроактивных полимеров состоит в том, что требуются довольно высокие рабочие напряжения, как упомянуто выше, для достижения высоких интенсивностей электрического поля в устройствах для реализации желаемых отклонений. Электронные управляющие схемы используются для генерации этих высоких напряжений и выполнения другой обработки сигналов. Для этих ЭАП требуются амплитуды управляющего напряжения до 1 кВ, и, таким образом, необходимо использовать и реализовать устройства высокого напряжения, чрезвычайно увеличивая стоимость (и размеры) электроники.
Помимо необходимости высоких напряжений другие функции обработки сигналов также занимают пространство, и это может воспрепятствовать желаемому уровню миниатюризации.
Другая проблема состоит в том, что управляющая электроника и ЭАП-привод обычно локально отделены друг от друга, что приводит к использованию проводов подачи высокого напряжения между компонентом управления и приводом. Однако это может представлять собой проблему безопасности, например, в случае обрывов провода, а также дает в результате высокие, нежелательные (или даже недопустимые) электрические и магнитные поля, а также электромагнитное излучение, которое может вызвать проблемы сертификации соответствия или даже может вредить пользователям.
Таким образом, существует потребность в конструкции ЭАП-привода, которая решает эти проблемы, например, для улучшения возможности миниатюризации, и/или чтобы позволить решить проблемы высокого напряжения.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Упомянутая выше потребность по меньшей мере частично удовлетворяется с помощью изобретения, определенного независимыми пунктами формулы изобретения. Зависимые пункты обеспечивают предпочтительные варианты осуществления.
Примеры в соответствии с аспектом изобретения обеспечивают устройство привода для преобразования электрического ввода в механический вывод, устройство содержит:
электроактивный полимерный привод; и
управляющую схему для управления электроактивным полимерным приводом, причем управляющая схема содержит схему повышения напряжения, и которая содержит по меньшей мере конденсатор,
причем устройство привода содержит электроактивный полимерный слой, имеющий активную область для деформации как функции поданного сигнала активации привода и механически пассивную область, причем активная область формирует по меньшей мере часть электроактивного полимерного привода, и механически пассивная область формирует по меньшей мере часть диэлектрика конденсатора.
В этом устройстве ЭАП-слой используется и для формирования по меньшей мере части активного привода, и для формирования по меньшей мере части диэлектрика конденсатора, используемого в управляющей схеме. Таким образом, активный слой электроактивного полимерного привода и диэлектрический слой конденсатора оба по меньшей мере частично содержат часть электроактивного полимерного слоя. Это позволяет осуществить миниатюризацию всего устройства и сокращение (производственных) затрат.
Управляющая схема повышения напряжения может содержать части, которые сформированы с использованием электроактивного полимерного слоя, и части, которые являются внешними по отношению к электроактивному полимерному слою. Например, управляющая схема может содержать различные каскады, и по меньшей мере один из этих каскадов использует конденсатор, интегрированный с электроактивным полимерным приводом.
Управляющая схема может включать в себя каскад сглаживания напряжения, содержащий конденсатор, соединенный параллельно с электроактивным полимерным приводом. Сглаживающий конденсатор, который является частью схемы повышения напряжения, таким образом, интегрирован с самим приводом.
Управляющая схема может содержать по меньшей мере один диод и конденсатор. Конденсаторно-диодные схемы могут использоваться для выполнения различных функций в схеме повышения напряжения. Диоды могут представлять собой, например, стандартные диоды или диоды Зенера.
Диод может являться внешним компонентом, который соединяется с внешними терминалами на электроактивном полимерном слое. Таким образом, конденсатор интегрирован в структуру привода, и существуют соединения внешних терминалов с диодом.
Вместо этого диод может являться устройством с тонкопленочным слоем, интегрированным в электроактивный полимерный слой. Это обеспечивает интеграцию обоих компонентов конденсатора и диода в ЭАП-привод. Диод может представлять собой, например, МДМ-диод.
В одном примере управляющая схема содержит диод, соединенный последовательно с электроактивным полимерным приводом, и конденсатор, соединенный параллельно с последовательным соединением электроактивного полимерного привода и диода. Тогда диод может функционировать как выпрямитель или как компонент защиты от высокого напряжения, который предотвращает, чтобы высокие напряжения нежелательной полярности достигали привода.
Управляющая схема может дополнительно содержать терминал разряда, соединенный с соединением между электроактивным полимерным приводом и диодом. Это может использоваться для быстрой деактивации привода, которой в ином случае препятствует диод.
В другом примере управляющая схема содержит диод, соединенный параллельно с электроактивным полимерным приводом, и конденсатор, соединенный параллельно с электроактивным полимерным приводом. Параллельный диод обеспечивает защиту от напряжения и может содержать, например, диод Зенера.
В другом множестве примеров управляющая схема является схемой повышения напряжения с накачкой заряда. Таким образом, требуемый управляющий сигнал высокого напряжения может быть сгенерирован локально с использованием интегрированной схемы. Это снова имеет преимущества в сокращении расходов и миниатюризации, а также избегает потребности в проводах подачи высокого напряжения.
Управляющая схема с накачкой заряда, например, содержит первый и второй конденсаторы, каждый из которых имеет диэлектрик, сформированный электроактивным полимерным слоем, и диодную структуру.
Управляющая схема может содержать схему удвоителя напряжения, или множество схем удвоителя напряжения, или схему утроителя напряжения, или множество схем утроителя напряжения.
В одном наборе примеров электроактивный полимерный слой содержит первую часть, которая формирует привод, и вторую отдаленную часть, которая формирует диэлектрический слой конденсатора. Таким образом, активная и пассивная части ЭАП-слоя разделены. Активные части конструируются для деформации в ответ на управляющее напряжение, тогда как пассивная часть не предназначена для деформации, таким образом, какая-либо деформация не имеет цель генерации механической работы, а является побочной.
Однако, конденсатор может быть сформирован в области привода устройства привода. Это обеспечивает более компактное решение. Оно может использоваться на основе многослойной стопки ЭАП-слоя.
Примеры в соответствии с другим аспектом изобретения обеспечивают способ управления электроактивным полимерным приводом устройства привода, способ содержит:
генерацию управляющего сигнала с использованием управляющей схемы повышения напряжения, которая содержит по меньшей мере конденсатор; и
подачу управляющего сигнала на электроактивный полимерный привод (35),
причем устройство привода содержит электроактивный полимерный слой (36), который формирует электроактивный полимерный привод, а также диэлектрический слой конденсатора.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Примеры изобретения будут теперь описаны подробно со ссылкой на приложенные схематические чертежи.
Фиг. 1 показывает известное электроактивное полимерное устройство, которое не зажато;
Фиг. 2 показывает известное электроактивное полимерное устройство, которое ограничено подложкой;
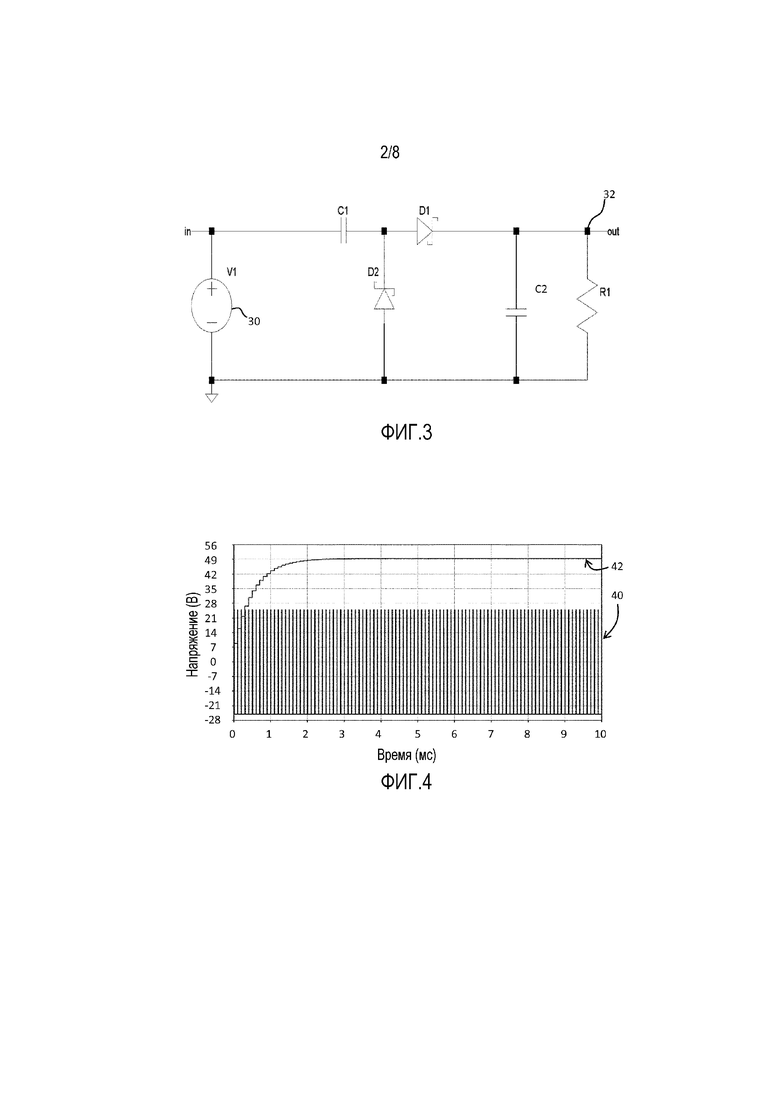
Фиг. 3 показывает первый пример схемы повышения напряжения;
Фиг. 4 показывает диаграмму синхронизации для демонстрации работы схемы на фиг. 3;
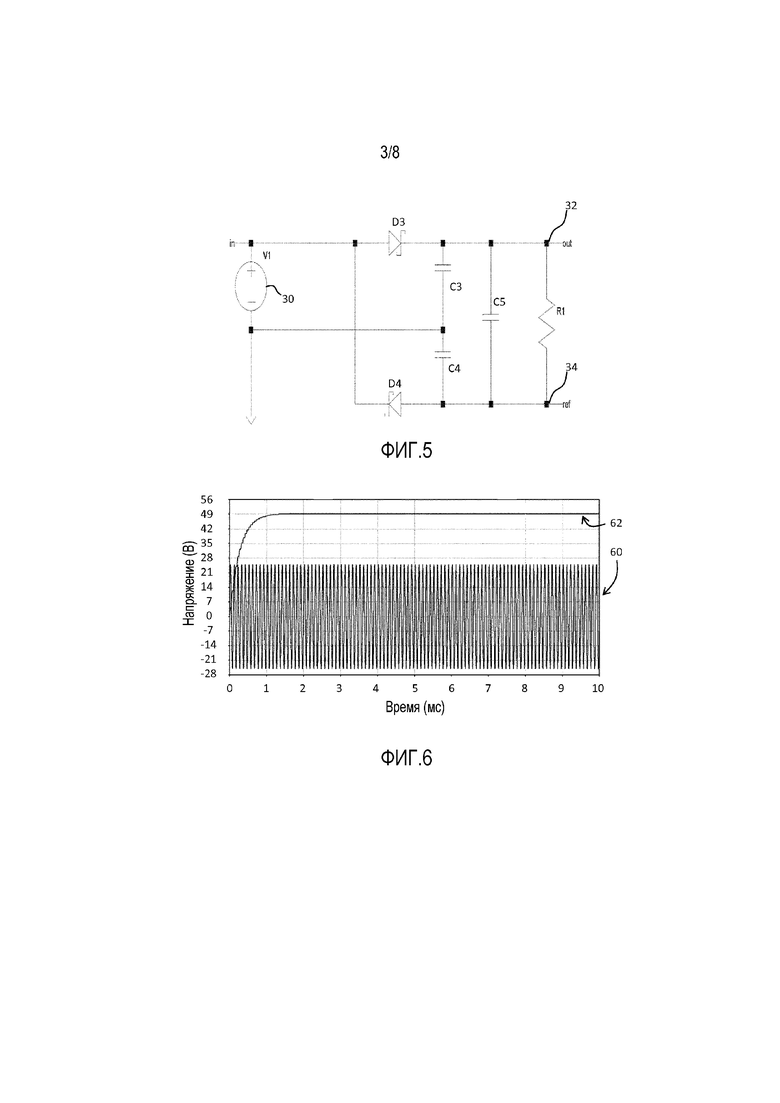
Фиг. 5 показывает второй пример схемы повышения напряжения;
Фиг. 6 показывает диаграмму синхронизации для демонстрации работы схемы на фиг. 5;
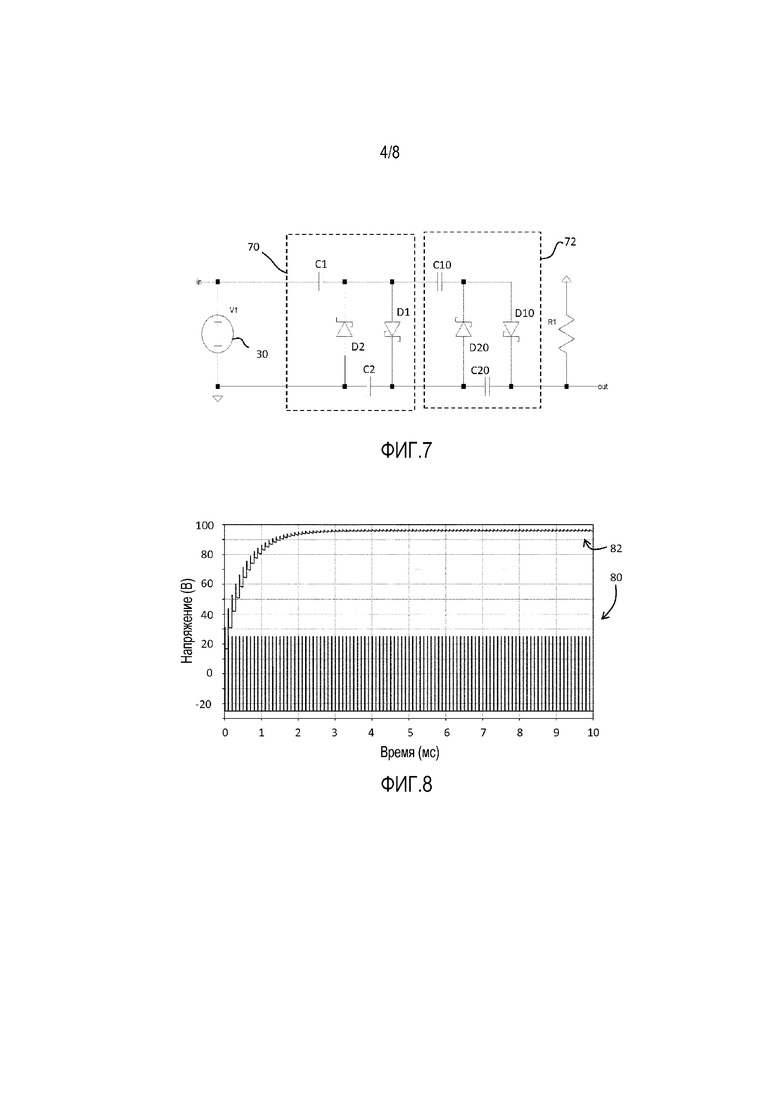
Фиг. 7 показывает третий пример схемы повышения напряжения;
Фиг. 8 показывает диаграмму синхронизации для демонстрации работы схемы на фиг. 7;
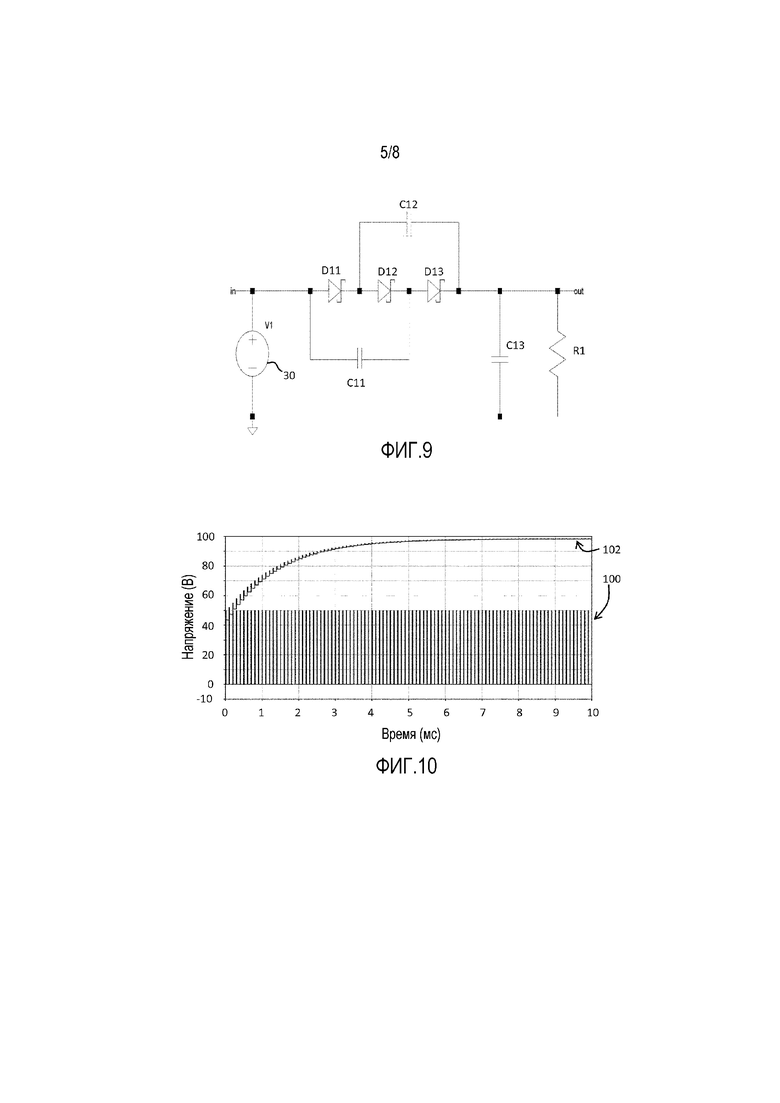
Фиг. 9 показывает четвертый пример схемы повышения напряжения;
Фиг. 10 показывает диаграмму синхронизации для демонстрации работы схемы на фиг. 9;
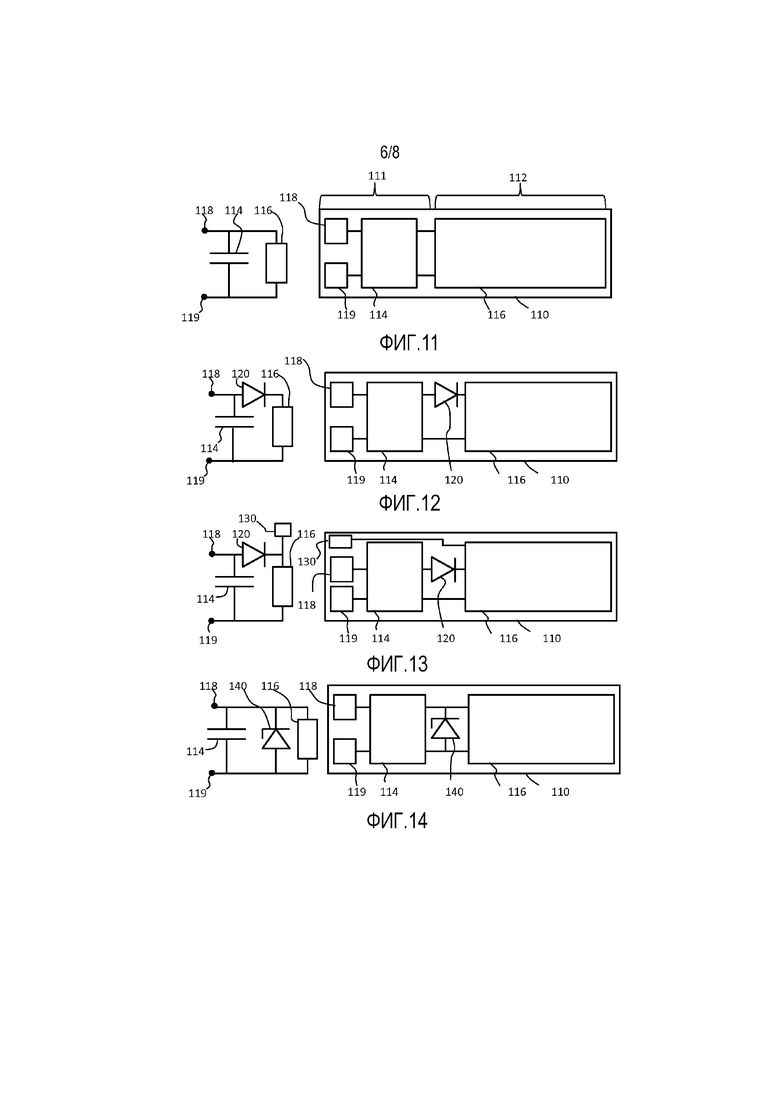
Фиг. 11 показывает первый пример ЭАП-привода с интегрированной управляющей схемой;
Фиг. 12 показывает второй пример ЭАП-привода с интегрированной управляющей схемой;
Фиг. 13 показывает третий пример ЭАП-привода с интегрированной управляющей схемой;
Фиг. 14 показывает четвертый пример ЭАП-привода с интегрированной управляющей схемой;
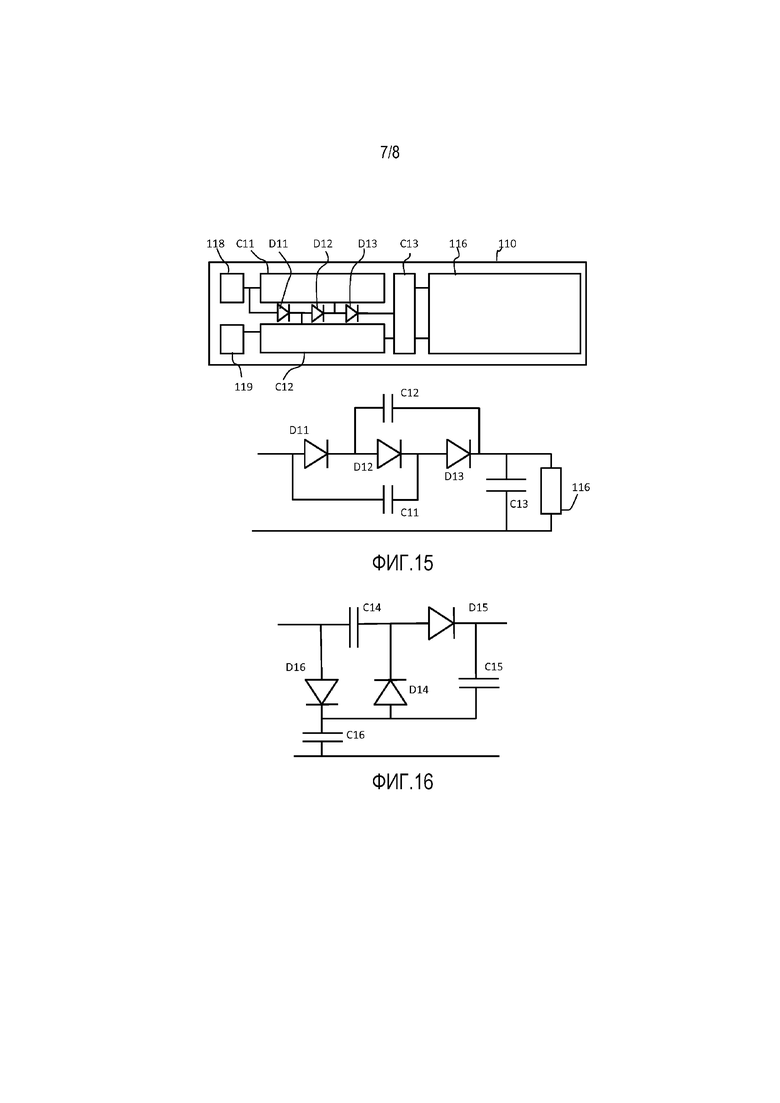
Фиг. 15 показывает пятый пример ЭАП-привода с интегрированной управляющей схемой;
Фиг. 16 показывает схему утроителя напряжения, которая также может быть объединена с ЭАП-приводом;
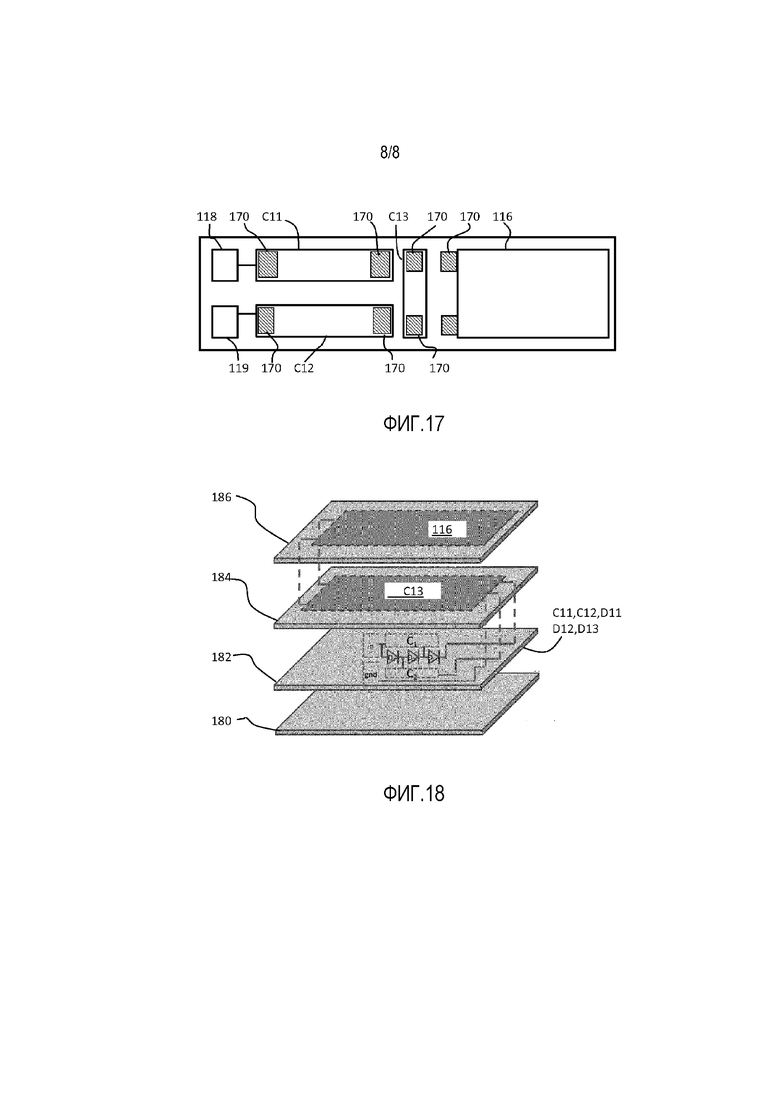
Фиг. 17 показывает шестой пример ЭАП-привода с интегрированной управляющей схемой; и
Фиг. 18 показывает, как конденсаторы и диоды могут быть интегрированы в структуру ЭАП-привода, и также в активную часть ЭАП-слоя.
ПОДРОБНОЕ ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
Изобретение обеспечивает устройство привода, содержащее электроактивный полимерный привод и управляющую схему для управления электроактивным полимерным приводом, и которая содержит по меньшей мере конденсатор. Электроактивный полимерный слой формирует электроактивный полимерный привод, а также диэлектрический слой конденсатора. Это обеспечивает интеграцию компонентов, чтобы обеспечить сокращение затрат и миниатюризацию.
В общих чертах управляемые полем электроактивные полимерные (ЭАП) приводы состоят из электрически изолирующего материала, встроенного между двумя электрически проводящими электродами. В качестве функции приложенного напряжения электрическое поле между электродами вызывает механическую деформацию ЭАП. Как разъяснено выше, посредством использования дополнительных материалов с разными коэффициентами удлинения (например, жесткостью) для ЭАП-слоя механическая деформация может быть направлена в некоторых заданных направлениях. Посредством реализации многослойной технологии интенсивность поля между электродами может быть увеличена, и, следовательно, для управления ЭАП-приводом требуются более низкие амплитуды напряжения, или могут быть реализованы более высокие механические деформации. Эта базовая конфигурация очень похожа на электрический многослойный конденсатор. Следовательно, базовая технология и конфигурация ЭАП также дают возможность реализации электрических конденсаторов.
Перед подробным описанием изобретения будут пояснены некоторые примеры представляющих интерес схем для управления ЭАП-приводов, использующих конденсаторы. В частности, существуют различные пассивные схемы повышения напряжения, которые используют конденсаторы. Они особенно интересны для увеличения напряжения, поданного на устройство привода, до уровней, требуемых управляемыми полем ЭАП.
В таких схемах конденсатор функционирует как компонент электрической схемы для обработки электрического входного сигнала и для генерации обработанного электрического выходного сигнала.
Первым возможным решением для повышения напряжения является схема Вилларда/Грейнахера (Villard/Greinacher), как показано на фиг. 3. Она состоит из двух конденсаторов: выпрямляющего конденсатора C1 (например, 100 нФ) и сглаживающего конденсатора C2 (например, 470 нФ), и двух диодов D1 и D2.
Первый конденсатор C1 и первый диод D1 соединены последовательно между положительным терминалом источника 30 напряжения и выходным терминалом 32. Второй диод D2 находится между соединением первого конденсатора C1 и первого диода D1 и землей. Сглаживающий конденсатор C2 находится на выходе параллельно выходному резистору R1 (например, 220 кОм).
Выходной резистор представляет выходную нагрузку в целях анализа функциональности схемы повышения напряжения.
Эквивалентная схема первого порядка ЭАП состоит из последовательной схемы резистора и конденсатора. Если нагрузочный резистор R1 заменить на ЭАП-привод, общим воздействием на вывод будет более сглаженное выходное напряжение и более быстрое его достижение. Емкостное поведение ЭАП будет действовать как помощь для сглаживания. Таким образом, значение параллельной сглаживающей емкости C2 может быть сокращено, или она может стать ненужной.
Показаны диоды Шоттки, но также могут использоваться стандартные диоды. Диоды Шоттки представляют интерес для высокочастотных применений. Комбинация C1 и D1 называется схемой Вилларда; она была расширена Грейнахером посредством добавления C2 и D2.
Два диода D1 и D2 позволяют сглаживающему конденсатору зарядиться до:
 Уравнение 1
Уравнение 1
Фиг. 4 показывает входное напряжение 40 как последовательность импульсов и показывает выходное напряжение 42. Схема не является совершенным удвоителем напряжения, поскольку удвоенное диодное пороговое напряжение вычитается из пикового входного напряжения.
Второй подход называется схемой Делона (Delon), показанной на фиг. 5.
Она состоит из первого выпрямительного диода D3 между первым (положительным) входным терминалом и первым выходным терминалом 32 и второго выпрямительного диода D4 между первым входным терминалом и вторым выходным терминалом 34 с противоположной полярностью. Первый выпрямительный диод D3 заряжает первый конденсатор C3 (между диодом и землей), и второй выпрямительный диод D4 заряжает второй конденсатор C4 (между диодом и землей). Вывод формируется через оба конденсатора C3, C4, и имеется параллельный сглаживающий конденсатор C5 и выходной резистор R1. Каждый конденсатор C3 и C4 заряжается до почти пикового входного напряжения (пиковое напряжение минус пороговое напряжение диода).
К сглаживающему конденсатору C5 прикладывается приблизительно удвоенное пиковое входное напряжение.
Уравнение 2
Фиг. 6 показывает входное напряжение 60 как последовательность импульсов и показывает выходное напряжение 62. Схема вновь не является совершенным удвоителем напряжения, поскольку удвоенное диодное пороговое напряжение вычитается из пикового входного напряжения.
Чтобы увеличить выходное напряжение более чем только приблизительно в два раза, также могут использоваться так называемые схемы умножения напряжения или каскады напряжения. В целом они основаны на поясненной выше топологии Вилларда/Грейнахера. Простой каскад напряжения на основе двух схем Вилларда показан на фиг. 7.
Первый каскад 70 содержит выпрямляющий конденсатор C1 и два диода D1, D2 со сглаживающим конденсатором C2. Второй каскад 72 содержит выпрямляющий конденсатор C10 и два диода D10, D20 со сглаживающим конденсатором C20.
Окончательное выходное напряжение задано как:
 Уравнение 3
Уравнение 3
Фиг. 8 показывает входное напряжение 80 как последовательность импульсов и показывает выходное напряжение 82. Схема вновь не является совершенной схемой умножения на 4 вследствие диодных пороговых напряжений.
Этот подход может быть масштабирован, чтобы обеспечить умножение на коэффициент n, если используются n схем удвоения напряжения. На практике n, как правило, меньше, чем приблизительно 20. В соответствии с этим выходное напряжение может быть вычислено как:
 Уравнение 4
Уравнение 4
Дополнительное решение представляет собой схему накачки заряда, как показано на фиг. 9. Существует много разных реализаций схемы накачки заряда, только один пример которой обеспечен. Схемы вновь используют комбинации диодов и конденсаторов. Часто они также требуют переключающие элементы, такие как транзисторы или схемы задержки фазы, для реализации соответствующей функциональности. Хотя эти схемы не исключены, на фиг. 9 показано решение без таких дополнительных переключающих элементов.
Схема содержит цепь из трех диодов D11, D12, D13. Первый конденсатор C11 накачки соединен параллельно с первыми двумя диодами D11 и D12, и второй конденсатор C12 накачки соединен параллельно с последними двумя диодами D12 и D13.
Конденсаторы C11 и C12 используются для накачки заряда в конечный сглаживающий конденсатор C13. Это происходит во время каждого положительного импульса управляющего входного напряжения. Диоды предотвращают разряд конденсаторов C11 и C12 накачки, а также сглаживающего конденсатора. Также генераторы подкачки заряда могут быть легко соединены в каскад, следовательно, может быть сгенерировано высокое выходное напряжение.
Конденсатор C11 заряжается электрическим током от входа, и конденсатор C12 заряжается электрическим током от выхода. Имеется два зарядных цикла на основе того, присутствует ли положительный импульс во входе. Между каждым циклом имеется ступенчатое изменение напряжения на терминалах конденсатора C11, в результате чего заряд накачивается между конденсаторами, тем самым поддерживая выходное напряжение на повышенном уровне напряжения по сравнению с входом.
Фиг. 10 показывает входное напряжение 100 как последовательность импульсов и показывает выходное напряжение 102. Как показано, обычно в качестве входного напряжения используется импульс прямоугольной формы. Однако, также могут использоваться другие формы сигнала. Кроме того, на вход может быть подано напряжение смещения DC, дополнительно повышающее выходное напряжение.
Генераторы накачки заряда также могут использоваться, чтобы генерировать отрицательные рабочие напряжения, и даже могут быть выполнены с возможностью генерировать выходное напряжение с другой полярностью по сравнению со входным напряжением. Они также являются масштабируемыми, чтобы дополнительно увеличить выходное напряжение. Многочисленные активные и пассивные схемы накачки заряда будут известны специалистам в области техники.
Как описано в общих чертах выше, изобретение основано на формировании с использованием ЭАП-слоя по меньшей мере конденсаторов для использования в схеме повышения напряжения. Часть или части ЭАП-слоя, используемые для конденсатора, могут являться неактивными областями, т.е., областями, которые не являются частью области активации привода. Однако, как будет разъяснено ниже, активные области также могли бы использоваться.
Конденсатор и любые другие компоненты, которые сформированы с использованием ЭАП-слоя в соответствии с изобретением, функционируют как компонент электрической схемы для обработки электрического входного сигнала и для генерации обработанного электрического выходного сигнала. Хотя материал ЭАП имеет присущую ему по природе функциональность преобразования электрической энергии в механическую, это не используется в качестве функции компонента схемы.
Однослойные или многослойные конструкции или их комбинации могут использоваться для реализации емкостной функциональности в сочетании с электроактивными полимерами, следовательно, может быть создан многофункциональный ЭАП. Кроме того, пассивные или активные компоненты, такие как диоды, показанные на приведенных выше схемах, могут быть смонтированы на специализированных зонах непосредственно на устройстве или соединены с ним через определенные терминалы. Эта встроенная функциональность имеет преимущества, как пояснялось выше. В качестве примера катушка может использоваться в сочетании с последовательным переключателем (таким как полевой транзистор), чтобы реализовать схему переключения, которая служит для предварительного повышения (например, с 5 В до 100 В) входа следующего решения для повышения напряжения. Последовательные схемы "переключатель-индуктивность" действительно известны в схемах электропитания в режиме переключателя.
Первый пример интегрированной конденсаторной схемы показан на фиг. 11.
Фиг. 11 (и фиг. 12-15 и 17) показывает вид сверху топологии компонентов, но только в схематичной форме. По существу, показана только часть ЭАП-слоя, используемого для формирования разных компонентов. Конденсатор показан как отдельный прямоугольник. Он представляет верхний электрод и нижний электрод с ЭАП-слоем между ними, функционирующим как диэлектрик. Конденсатор может представлять собой пару электродов с полной однослойной ЭАП-структурой, сформированной между ними, или может иметься несколько электродных слоев, каждый с ЭАП-слоем между ними в качестве диэлектрического слоя, и несколько таких диэлектрических слоев формируют многослойную стопку. Показаны два электрических соединения к конденсатору и от конденсатора, но они идут к двум электродам конденсатора (на разных высотах в структуре). Аналогичным образом, контакты для терминалов конденсатора требуют соединений на разных высотах в структуре, и с этой целью используются сквозные отверстия, чтобы любой возможный внешний контакт находился на уровне поверхности. Эти подробности реализации структуры многослойной схемы являются обычной практикой для специалистов в области техники.
Это самый простой подход для многофункционального электроактивного полимерного устройства. ЭАП-слой 110 сформирован как пассивная область 111 и активная область 112. Активная область является частью устройства, которая предназначена для деформации в ответ на сигнал активации привода. Пассивная область 111 имеет интегрированный конденсатор 114, тогда как активная область имеет электроды, которые определяют привод 116. Два электрических контакта 118, 119 функционируют в качестве входа и земли (или, в общем случае, любого опорного потенциала). Два электрических контакта не обязательно должны находиться на одной и той же стороне устройства, а также могут находиться на противоположных сторонах.
Конденсатор (или другие компоненты) в пассивной области 111, таким образом, выполнен с возможностью обеспечивать функцию обработки электрического сигнала, которая не основывается на деформации ЭАП-слоя, в пассивной области.
Пассивная область, таким образом, является механически пассивной, это означает, что не имеется ни какого-либо управляемого механического ввода, ни какого-либо управляемого механического вывода. Деформация может быть изолирована от пассивной области, или в ином случае влияние деформации на функционирование компонентов в пассивной области может рассматриваться как допустимые отклонения компонента схемы, и тогда схемы разрабатываются с учетом этих допустимых отклонений.
Фиг. 11 также показывает принципиальную схему и показывает ЭАП-привод 116, соединенный параллельно со сглаживающим конденсатором 114.
Этот сглаживающий конденсатор представляет собой, например, каскад полной управляющей схемы повышения напряжения, и сглаживающий конденсатор выполняет часть управления повышением напряжения при управлении приводом.
Желательно, чтобы функция активации привода не влияла на работу управляющей схемы (в этом случае лишь простого конденсатора, но более сложной схемы в дополнительных примерах ниже). Движение ЭАП-привода, таким образом, должно быть изолировано от управляющей схемы. Это может быть обеспечено посредством определения механически неактивной части ЭАП-слоя 110 между управляющей схемой (конденсатором 114 в этом примере) и ЭАП-приводом 116, например, посредством наличия области без какого-либо слоя покрывающего материала, тогда как такой покрывающий слой (с другими механическими коэффициентами расширения) используется в ЭАП-приводе. Однако механическая деформация, вызванная активацией привода, как правило, обеспечивает сокращенную толщину слоя, которая, в свою очередь, увеличивает емкость, что может быть допустимо в электрической цепи.
Фиг. 12 показывает второй пример схемы, содержащей ЭАП-привод со схемой, содержащей конденсатор и диод. Диод 120 обеспечен между электродом конденсатора 114 и электродом привода 116. Например, это дискретный внешний компонент, смонтированный на ЭАП-слое.
Как показано на принципиальной схеме, диод 120 соединен последовательно между одним терминалом конденсатора и одним терминалом привода. Этот диод может иметь разные функции, такие как выпрямление входного сигнала или защита ЭАП-привода от нежелательных амплитуд высокого напряжения с неправильной полярностью, или предохранение ЭАП-устройства, имеющего путь разряда через управляющую электронику. Позиция диода может быть другой, например, между входным электродом и сглаживающим конденсатором.
Хотя такая реализация диода может иметь преимущества, она также сокращает время деактивации ЭАП-привода, поскольку привод может деактивироваться только через внутренние паразитные емкости. Фиг. 13 показывает размещение, в котором устройство снабжено по меньшей мере еще одним электрическим терминалом 130 для быстрой деактивации (например, с использованием переключателя или транзистора).
Вместо стандартных диодов могут использоваться диоды Зенера, чтобы защитить ЭАП от нежелательных амплитуд высокого напряжения. Фиг. 14 показывает пример с диодом 140 Зенера, соединенным параллельно с ЭАП-приводом 116.
Таким же образом, как показано выше, в разных комбинациях может быть добавлено больше компонентов. В частности, резисторы, индуктивности, транзисторы и т.п. могут быть добавлены последовательно, параллельно или в смешанных конфигурациях, чтобы увеличить функциональность.
Фиг. 15 показывает пример, использующий схему умножения напряжения.
Схема основана на схеме на фиг. 9, и для компонентов схемы используются те же самые ссылки. Каскад умножения напряжения, таким образом, содержит два конденсатора C11, C12 накачки, сглаживающий конденсатор C13 и три диода D11, D12, D13. Возможны также другие топологии и каскадные структуры.
Этот каскад умножения напряжения представляет собой удвоитель напряжения, но в определенных случаях может быть более выгоден более высокий уровень умножения. Как описано выше, удвоители напряжения могут быть уложены в стопку, чтобы увеличить коэффициент умножения. В качестве альтернативы может использоваться утроитель напряжения.
Фиг. 16 показывает пример схемы утроителя напряжения. Для этого требуются три конденсатора C14, C15, C16 накачки заряда и три диода D14, D15, D16. Хотя нужно больше площади для емкости, ЭАП-слой имеет достаточно площади для большей емкости, особенно если используется многослойная структура.
В примере на фиг. 13 используется дополнительный терминал для разрядки устройства. Может быть добавлено больше терминалов, чтобы обеспечить возможность соединения других электрических компонентов и элементов.
Фиг. 17 показывает пример, основанный на компонентах фиг. 15, но без внутренних соединений. Вместо этого обеспечены терминалы 170, которые обеспечивают возможность соединения с терминалами конденсатора и с терминалами привода. Таким образом, имеются интегрированные конденсаторы, но должны быть сформированы несколько дополнительных терминалов 170, обеспечивающих разные конфигурации. Следовательно, посредством соединения компонентов и/или замыканий с этими терминалами 170 пользователь может проявлять гибкость при формировании конфигурации схемы в соответствии с требованиями конкретного применения.
Вместо использования внешних диодов и наличия терминалов для соединения с внешними диодами (или другими пассивными элементами) ЭАП-устройство может использовать тонкопленочные диоды, которые могут быть интегрированы между слоями многослойной стопки ЭАП. Тонкопленочные диоды, такие как диоды структуры металл-диэлектрик-металл (МДМ; MIM), являются чрезвычайно тонкими структурами, которые могут быть объединены в фольге схемы между слоями стопки ЭАП. Тонкопленочные транзисторы также могут быть включены в многослойную структуру стопки ЭАП.
Например, известны МДМ-диоды конфигурации "золото-пентацен-алюминий" с напряжением пробоя обратного смещения более чем 100 В, т.е., в диапазоне напряжения ЭАП. Для (однослойных) диэлектрических эластомеров требуются высокие задающие напряжения в диапазоне киловольт. Для многослойных ЭАП могут использоваться низкие задающие напряжения, например, требуется приблизительно до 250 В. По мере продвижения технологии толщина слоя ЭАП сокращается, позволяя более низкие амплитуды управляющего напряжения.
Выходное напряжение решения для повышения напряжения зависит от входного напряжения, которое также может быть увеличено с использованием методики, известной в области электроснабжения в режиме переключения. Повышение дополнительно может быть увеличено посредством каскадирования большего количества секций, например, несколько каскадов схем на фиг. 7 и 9.
Промежуточное напряжение постоянного тока (например, 50 В) может использоваться в качестве источника электроснабжения DC для следующей секции повышения напряжения, тем самым формируя генератор с прямоугольной функцией.
Несколько из диодов могут быть соединены последовательно, чтобы еще больше увеличить напряжение пробоя. Таким образом, во всех упомянутых выше примерах вместо использования дискретных диодов могут использоваться тонкопленочные диоды со структурой металл-диэлектрик-металл (органические).
Все приведенные выше примеры обеспечивают дополнительные элементы схем, в том числе конденсаторы и факультативно также диоды, вне активной области, где сконструирован привод для деформации.
Однако конденсаторы также могут быть сформированы в активной области 112 ЭАП. Пример показан на фиг. 18 на основе схемы на фиг. 15.
Устройство содержит многослойную структуру над пассивной подложкой 180.
Первый слой 182 несет конденсаторы C11, C12 накачки заряда и диоды D11, D12, D13. Второй слой 184 несет сглаживающий конденсатор C13. Третий слой 186 несет электрод привода ЭАП-привода 116.
Это представляет интерес для конфигурации ЭАП с ограниченным пространством для любой неактивной области. Например, это может иметь место, когда желателен массив ЭАП-приводов. Различные конденсаторы интегрированы в активной области ЭАП посредством укладывания в стопку вертикально. Схема C11 и C12 накачки заряда имеет наиболее низкое подаваемое напряжение, поскольку она находится в слое, наиболее близком к пассивной подложке, близко к нейтральной линии. Сглаживающий конденсатор и ЭАП-привод обеспечивают деформацию, когда подается напряжение, и они расположены дальше от нейтральной линии. Вертикальные взаимные соединения сделаны через отверстия в неактивных частях стопки EAP (не показаны подробно).
Как упомянуто выше, одним применением являются матричные устройства. Диоды могут использоваться для создания массива ЭАП, причем каждый ЭАП находится в точке пересечения массива и использует либо МДМ-диод, либо двойной диод и схему управления сбросом. Таким образом, пассивные матричные массивы с диодными переключателями в элементах массива могут быть сформированы как интегрированная структура.
Обычно диэлектрическая постоянная материала ЭАП находится в диапазоне 3-5. Могут использоваться дополнительные слои, чтобы изменить диэлектрические свойства.
В предположении простых прямоугольных конфигураций для интегрированного конденсатора:
C=nε0εrab/d
(a, b=длина, ширина, d=толщина диэлектрических слоев, n=количество слоев, ε0=диэлектрическая постоянная вакуума, εr=диэлектрическая постоянная относительно вакуума). В качестве примера может иметься 10-200 слоев, каждый толщиной 3-5 мкм. Область повышения напряжения не обязательно должна быть оптимизирована ни для какой механической деформации.
В качестве примера могут быть приняты 100 слоев толщиной 1 мкм, что соответствует толщине активной части ЭАП-привода.
Если выбрана емкость, соответствующая той, которая обычно используется в каскаде повышения напряжения, например, C=100 нФ, требуемая боковая площадь составляет ab=22,6 мм2. Таким образом, требуемые линейные размеры имеют порядок миллиметров, например, с требуемой площадью менее 100 мм2. Площадь конденсатора, например, меньше, чем активная площадь привода.
Это показывает, что пространство, требуемое для реализации желаемого уровня емкости, не вынуждает, чтобы в общей площади устройства превалировал конденсатор.
Если емкость (и, следовательно, требуемая площадь) сокращается, эффект состоит в том, что напряжение активации ЭАП достигнет своего окончательного значения немного позже, таким образом, ЭАП сможет реагировать немного медленнее, но в зависимости от условий нагрузки.
Пример типичных активных размеров ЭАП-привода представляет 15 мм x 12 мм =180 мм2. Если взять (неоптимизированный) пример 22,6 мм2, один конденсатор 100 нФ увеличил бы площадь ЭАП на 22,6/180=12,5%. Часто требуются только два повышающих конденсатора, и сглаживающий конденсатор может стать ненужным, поскольку сам ЭАП будет вести себя как сглаживающий конденсатор.
Описанное выше интегрированное устройство позволяет уменьшить требуемое входное напряжение для устройства, повышая безопасность компонента и улучшая электромагнитные рабочие характеристики. Устройство может быть чрезвычайно плоским и гибким, не требующим каких-либо соединений высокого напряжения.
Материалы, подходящие для ЭАП-слоя, известны.
Электроактивные полимеры включают в себя, но без ограничения, подклассы: пьезоэлектрические полимеры, электромеханические полимеры, сегнетоэлектрические релаксоры, электрострикционные полимеры, диэлектрические эластомеры, жидкокристаллические эластомеры, сопряженные полимеры, ионные полимер-металлические композиты, ионные гели и полимерные гели.
Подкласс электрострикционные полимеры включает в себя, но без ограничения:
Поливинилиденфторид (PVDF), поливинилиденфторид-трифторэтилен (PVDF-TrFE), поливинилиденфторид-трифторэтилен-хлорфторэтилен (PVDF-TrFE-CFE), поливинилиденфторид-трифторэтилен-хлортрифторэтилен) (PVDF-TrFE-CTFE), поливинилиденфторид-гексафторпропилен (PVDF-HFP), полиуретаны или их смеси.
Подкласс диэлектрические эластомеры включают в себя, но без ограничения:
акрилаты, полиуретаны, силиконы.
Подкласс сопряженные полимеры включает в себя, но без ограничения:
полипиррол, поли-3,4-этилендиокситиофен, поли(p-фенилен сульфид), полианилины.
Ионные устройства могут быть основаны на ионных полимер-металлических композитах (IPMC) или сопряженных полимерах. Ионный полимер-металлический композит (IPMC) представляет собой синтетический композитный наноматериал, который проявляет поведение искусственных мышц при приложении напряжения или электрического поля.
Более конкретно IPMC состоят из ионного полимера, такого как Nafion или Flemion, на поверхности которого посредством химического или физического покрытия нанесены проводники, например, платиновые или золотые электроды, или электроды на основе углерода. Под приложенным напряжением перенос и перераспределение ионов вследствие поданного напряжения на полоску из IPMC приводят к деформации изгиба. Полимер представляет собой мембрану из набухающего при растворении ионообменного полимера. Поле вызывает перемещение катионов на сторону катода вместе с водой. Это приводит к реорганизации гидрофильных кластеров и к расширению полимера. Деформация в области катода приводит к напряжению в остальной части полимерной матрицы, приводящему к изгибу в сторону анода. Изменение полярности приложенного напряжения меняет направление изгиба.
Если осажденные электроды размещены в несимметричной конфигурации, наложенное напряжение может вызвать все виды деформаций, таких как извивание, свертывание, скручивание, накручивание и несимметричная деформация изгиба.
Во всех этих примерах дополнительные пассивные слои могут быть обеспечены для влияния на электрическое и/или механическое поведение слоя ЭАП в ответ на приложенное электрическое поле.
Слой ЭАП каждого блока может быть помещен между электродами. Электроды могут быть растягивающимися, чтобы следовать за деформацией слоя материала ЭАП. Материалы, подходящие для электродов, также известны и, например, могут быть выбраны из группы, содержащей тонкие металлические пленки, например, золотые, медные или алюминиевые, или органические проводники, например, сажистый углерод, углеродные нанотрубки, графен, полианилин (PANI), поли(3,4-этилендиокситиофен) (PEDOT), например, поли(3,4-этилендиокситиофен) поли(стиролсульфонат) (PEDOT:PSS). Также могут использоваться металлизированные полиэфирные пленки, такие как металлизированный полиэтилентерефталат (PET), например, с использованием алюминиевого покрытия.
Изобретение может быть применено во многих применениях ЭАП и фотоактивных полимеров, включая примеры, в которых интерес представляет пассивный матричный массив приводов.
Во многих применениях главная функция продукта основывается на (локальной) манипуляции человеческой ткани или активации поверхностей контакта с тканью. В таких применениях ЭАП-приводы, например, предоставляют уникальные преимущества главным образом благодаря миниатюрному форм-фактору, гибкости и высокой плотности энергии. Следовательно, ЭАП и фоточувствительные полимеры могут быть легко интегрированы в мягкие, трехмерные и/или миниатюрные продукты и интерфейсы. Далее приведены примеры таких применений.
Косметический уход за кожей, например, приборы активации кожи в форме кожного пластыря на основе чувствительного полимера, которые придают коже постоянное или циклическое растяжение, чтобы натянуть кожу или уменьшить морщины.
Дыхательные устройства с маской взаимодействия с пациентом, которые имеют активную подушку или прокладку на основе чувствительного полимера, чтобы обеспечить переменное нормальное давление на кожу для сокращения или предотвращения красных отметин на лице.
Электрические бритвы с адаптивной бреющей головкой. Высота поверхностей контакта с кожей может регулироваться с использованием приводов из чувствительного полимера для влияния на баланс между близостью и раздражением.
Приборы для очистки полости рта, такие как воздушная зубная нить с приводом динамического сопла для улучшения проникновения струи, особенно в промежутках между зубами. В качестве альтернативы зубные щетки могут быть снабжены активированными пучками.
Устройства бытовой электроники или сенсорные панели, которые обеспечивают локальную тактильную обратную связь через массив чувствительных полимерных преобразователей, которые интегрированы в пользовательский интерфейс или находятся рядом.
Катетеры с направляемым кончиком для упрощения навигации в извилистых кровеносных сосудах.
Измерения физиологических параметров человеческого тела, таких как частота сердцебиения, SpO2 и кровяное давление.
Еще одна категория соответствующего применения, которой принесет пользу использование таких приводов, относится к модификации света. Оптические элементы, такие как линзы, отражающие поверхности, дифракционные решетки и т.д., могут быть сделаны адаптивными по форме или с адаптацией позиции с использованием этих приводов. В этом случае одним преимуществом ЭАП является, например, более низкое потребление энергии.
Другие изменения для раскрытых вариантов осуществления могут быть поняты и выполнены специалистами в области техники при осуществлении на практике заявленного изобретения на основе изучения чертежей, раскрытия и зависимых пунктов формулы изобретения. В пунктах формулы изобретения слово "содержит" не исключает другие элементы или этапы, и употребление единственного числа не исключает множество. Тот лишь факт, что некоторые меры описаны во взаимно различных зависимых пунктах формулы изобретения, не указывает, что комбинация этих мер не может использоваться для получения преимуществ. Любые знаки для ссылок в формуле изобретения не должны рассматриваться как ограничивающие объем изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ПРИВОДА, ИМЕЮЩЕЕ В СВОЕМ СОСТАВЕ ЭЛЕКТРОАКТИВНЫЙ ПОЛИМЕРНЫЙ ПРИВОД, И СПОСОБ УПРАВЛЕНИЯ | 2017 |
|
RU2737790C2 |
| ПРИВОДНОЕ УСТРОЙСТВО, СОДЕРЖАЩЕЕ ПРИВОД НА ОСНОВЕ ЭЛЕКТРОАКТИВНОГО ПОЛИМЕРА, И СПОСОБ ВОЗБУЖДЕНИЯ | 2017 |
|
RU2736071C2 |
| ЭЛЕКТРОАКТИВНЫЙ ПОЛИМЕРНЫЙ ПРИВОД | 2017 |
|
RU2736009C2 |
| ЭАП-ПРИВОД И СПОСОБ ВОЗБУЖДЕНИЯ | 2017 |
|
RU2750680C2 |
| УСТРОЙСТВО ПРИВОДА И СПОСОБ | 2017 |
|
RU2749570C2 |
| УСТРОЙСТВО АКТУАТОРА НА ОСНОВЕ ЭЛЕКТРОАКТИВНОГО ПОЛИМЕРА | 2016 |
|
RU2723889C2 |
| ПРИВОД НА ОСНОВЕ ЭЛЕКТРОАКТИВНОГО МАТЕРИАЛА И СПОСОБ ВОЗБУЖДЕНИЯ | 2018 |
|
RU2766272C2 |
| ДАТЧИКИ НА ОСНОВЕ ЭЛЕКТРОАКТИВНЫХ ПОЛИМЕРОВ И СПОСОБЫ ВОСПРИЯТИЯ | 2016 |
|
RU2723887C2 |
| ПРИВОДНОЕ И СЕНСОРНОЕ УСТРОЙСТВО НА ОСНОВЕ ЭЛЕКТРОАКТИВНОГО ПОЛИМЕРА | 2016 |
|
RU2721302C2 |
| СЕНСОРНОЕ УСТРОЙСТВО И СПОСОБ ИЗМЕРЕНИЯ ФИЗИОЛОГИЧЕСКОГО ПАРАМЕТРА | 2017 |
|
RU2750352C2 |
Устройство привода для преобразования электрического ввода в механический вывод содержит электроактивный полимерный привод и управляющую схему для управления электроактивным полимерным приводом, причем управляющая схема содержит схему повышения напряжения, которая содержит по меньшей мере конденсатор, устройство привода содержит электроактивный полимерный слой, имеющий активную область для деформации как функции поданного сигнала активации и механически пассивную область, причем активная область формирует по меньшей мере часть электроактивного полимерного привода, и механически пассивная область формирует по меньшей мере часть диэлектрика конденсатора. Изобретение обеспечивает возможность решить существующую потребность в миниатюрной конструкции электроактивного привода и решить проблемы использования высокого напряжения. 2 н. и 13 з.п. ф-лы, 18 ил.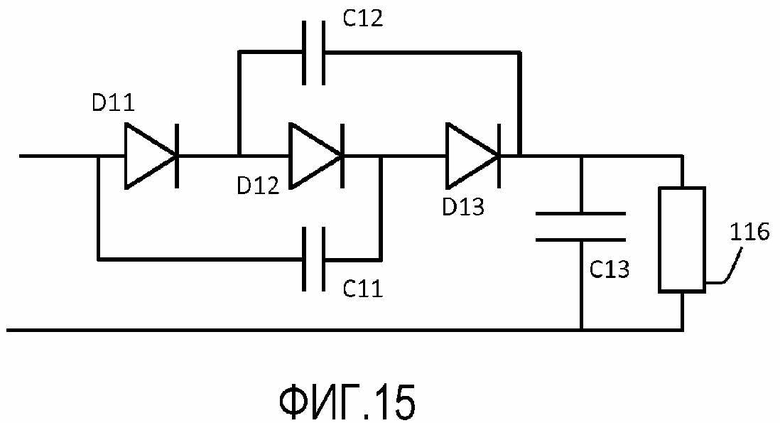
1. Устройство привода для преобразования электрического ввода в механический вывод, содержащее:
электроактивный полимерный привод (116); и
управляющую схему (114) для управления электроактивным полимерным приводом, причем управляющая схема содержит схему повышения напряжения, и которая содержит по меньшей мере конденсатор,
причем устройство привода содержит электроактивный полимерный слой (110), имеющий активную область (112) для деформации как функции поданного сигнала активации и механически пассивную область (111), причем активная область формирует по меньшей мере часть электроактивного полимерного привода, и механически пассивная область формирует по меньшей мере часть диэлектрика конденсатора.
2. Устройство привода по п. 1, в котором управляющая схема содержит каскад сглаживания напряжения, содержащий конденсатор (114), соединенный параллельно с электроактивным полимерным приводом (116).
3. Устройство привода по п. 1, в котором управляющая схема содержит по меньшей мере один диод (120) и конденсатор (114).
4. Устройство привода по п. 3, в котором диод (120) является внешним компонентом, который соединяется с внешними терминалами на электроактивном полимерном слое.
5. Устройство привода по п. 3, в котором диод является устройством с тонкопленочным слоем, интегрированным в электроактивный полимерный слой.
6. Устройство привода по п. 5, в котором диод является МДМ-диодом.
7. Устройство привода по п. 3, в котором управляющая схема содержит диод (120), соединенный последовательно с электроактивным полимерным приводом, и конденсатор (114), соединенный параллельно с последовательным соединением электроактивного полимерного привода и диода.
8. Устройство привода по п. 7, в котором управляющая схема дополнительно содержит терминал (130) разряда, соединенный с соединением между электроактивным полимерным приводом и диодом.
9. Устройство привода по п. 1, в котором управляющая схема содержит диод (140) Зенера, соединенный параллельно с электроактивным полимерным приводом (116), и конденсатор (114), соединенный параллельно с электроактивным полимерным приводом.
10. Устройство привода по п. 3, в котором управляющая схема является схемой повышения напряжения с накачкой заряда.
11. Устройство привода по п. 10, в котором управляющая схема содержит первый и второй конденсаторы (C11, C12), каждый из которых имеет диэлектрик, сформированный электроактивным полимерным слоем (110), и диодную структуру.
12. Устройство привода по п. 11, в котором управляющая схема содержит схему удвоителя напряжения, или множество схем удвоителя напряжения, или схему утроителя напряжения, или множество схем утроителя напряжения.
13. Устройство привода по любому из предыдущих пунктов, в котором электроактивный полимерный слой содержит первую часть, которая формирует привод, и вторую отдаленную часть, которая формирует диэлектрический слой конденсатора.
14. Устройство привода по любому из пп. 1-12, в котором конденсатор сформирован в области привода устройства привода.
15. Способ управления электроактивным полимерным приводом (116) устройства привода, содержащий этапы, на которых:
генерируют управляющий сигнал с использованием управляющей схемы повышения напряжения, которая содержит по меньшей мере конденсатор; и
подают управляющий сигнал на электроактивный полимерный привод,
причем устройство привода содержит электроактивный полимерный слой, имеющий активную область для деформации как функции поданного сигнала активации и механически пассивную область, причем активная область формирует по меньшей мере часть электроактивного полимерного привода, и механически пассивная область формирует по меньшей мере часть диэлектрика конденсатора.
| Колосоуборка | 1923 |
|
SU2009A1 |
| Приспособление для суммирования отрезков прямых линий | 1923 |
|
SU2010A1 |
| ТЕРМОПЛАСТИЧНАЯ ПОВЯЗКА, ОБЛАДАЮЩАЯ ИСКЛЮЧИТЕЛЬНОЙ ДЕФОРМАТИВНОСТЬЮ И ЖЕСТКОСТЬЮ, И СПОСОБ ЕЕ ИЗГОТОВЛЕНИЯ | 2014 |
|
RU2654194C2 |
| DE 10214005881 A1, 22.10.2015 | |||
| ЭЛЕКТРОАКТИВНЫЙ ПОЛИМЕРНЫЙ АКТЮАТОР | 2011 |
|
RU2568944C2 |

