Область техники, к которой относится изобретение
[0001] Настоящее изобретение относится к устройству формирования целевого маршрута. Более конкретно, настоящее изобретение относится к устройству формирования целевого маршрута, которое формирует целевой маршрут для управления приведением в движение транспортного средства.
Уровень техники
[0002] Делаются попытки разработать устройство автономного управления приведением в движение, которое способно автономно управлять транспортным средством от пункта отправления до пункта назначения (например, ссылка на патентный документ 1). В этом типе устройства автономного управления приведением в движение, например, курс (маршрут) транспортного средства от пункта отправления до пункта назначения вычисляется с помощью хорошо известной навигационной технологии, и полосы движения и препятствия по курсу обнаруживаются с помощью технологии обнаружения, такой как радиолокационный датчик, датчик изображения и т.д. Устройство автономного управления приведением в движение инструктирует транспортному средству двигаться автономно по курсу на основе обнаруженной информации.
Документы предшествующего уровня техники
Патентные документы
[0003] Патентный документ 1
Японская выложенная патентная публикация № 2011-240816
Сущность изобретения
Задача изобретения
[0004] В управлении транспортным средством в таком автономном приведении в движение маршрут от пункта отправления до пункта назначения может быть разделен на предварительно определенные участки, и целевой маршрут, который показывает траекторию приведения в движение транспортного средства и поведение транспортного средства (например, скорость транспортного средства, ускорение, угол поворота рулевого колеса и т.д.), может быть обновлен для каждого участка, чтобы использоваться в управлении транспортного средства.
[0005] В таком обновлении целевого маршрута представляется возможным задавать точку обновления маршрута перед конечной точкой участка и выполнять обновление на новый целевой маршрут в точке обновления маршрута. Кроме того, в этом случае, представляется возможным задавать заранее целевой маршрут, который должен быть использован после проезда точки обновления маршрута, так что транспортное средство надлежащим образом управляется даже в случае, в котором вычисление нового целевого маршрута не завершено в точке обновления маршрута, вследствие того, что вычисление нового целевого маршрута занимает время. Например, представляется возможным задавать заранее целевой маршрут, так что транспортное средство останавливается в конечной точке участка, если вычисление нового целевого маршрута не завершено в точке обновления маршрута. Однако, управление, которое равномерно останавливает транспортное средство таким образом, затруднительно для пользователя, едущего в транспортном средстве, и существует вероятность того, что пользователь почувствует дискомфорт в ходовых качествах.
[0006] Задачей настоящего изобретения является предоставление устройства формирования целевого маршрута, которое уменьшает дискомфорт, который чувствуется пользователем при обновлении целевого маршрута.
Средство решения задачи
[0007] Устройство формирования целевого маршрута в качестве одного варианта осуществления настоящего изобретения содержит блок формирования, который формирует, в предварительно определенный момент времени, целевой маршрут для управления приведением в движение транспортного средства на предварительно определенном участке, и блок настройки, который задает целевую скорость транспортного средства заранее в конечной точке участка для участка, на котором транспортное средство в настоящий момент движется, которая является целевой скоростью транспортного средства, которая используется, когда блок формирования не может сформировать целевой маршрут в предварительно определенный момент времени, при этом блок настройки задает целевую скорость транспортного средства на основе дорожной информации на предварительно определенном участке.
Преимущества изобретения
[0008] Согласно настоящему изобретению, становится возможным предоставлять устройство формирования целевого маршрута, которое уменьшает дискомфорт, который чувствуется пользователем при обновлении целевого маршрута.
Краткое описание чертежей
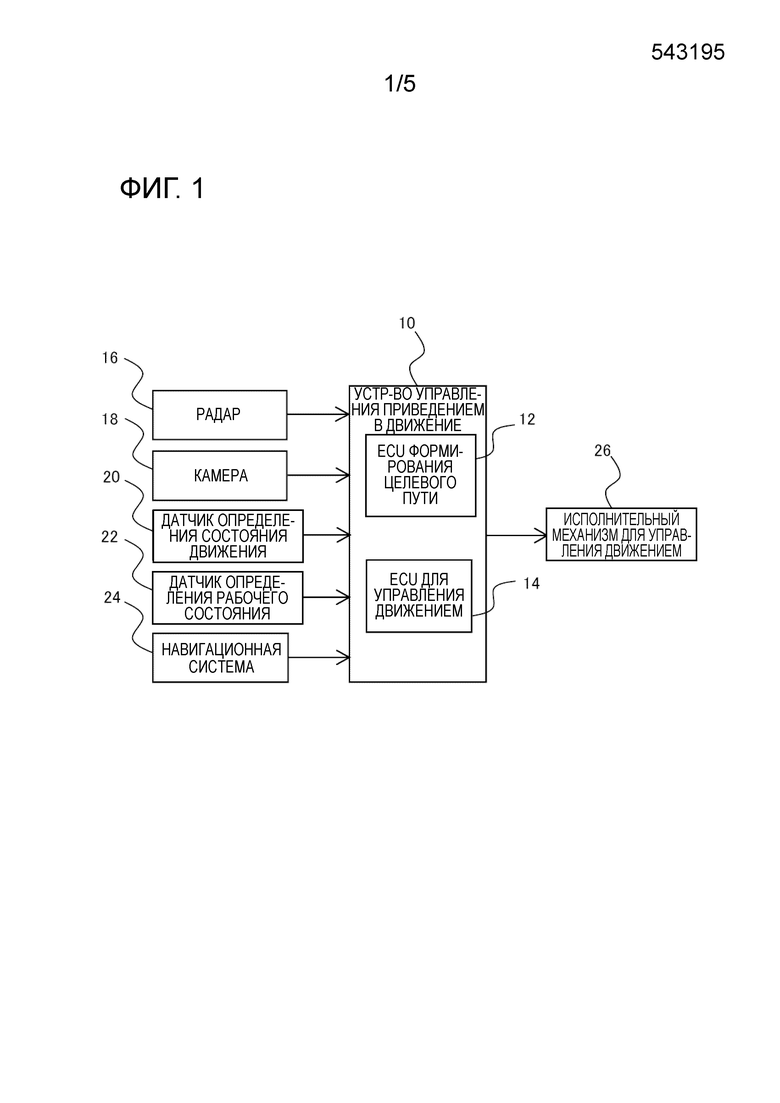
[0009] Фиг. 1 - это блок-схема, иллюстрирующая устройство управления приведением в движение согласно варианту осуществления изобретения.
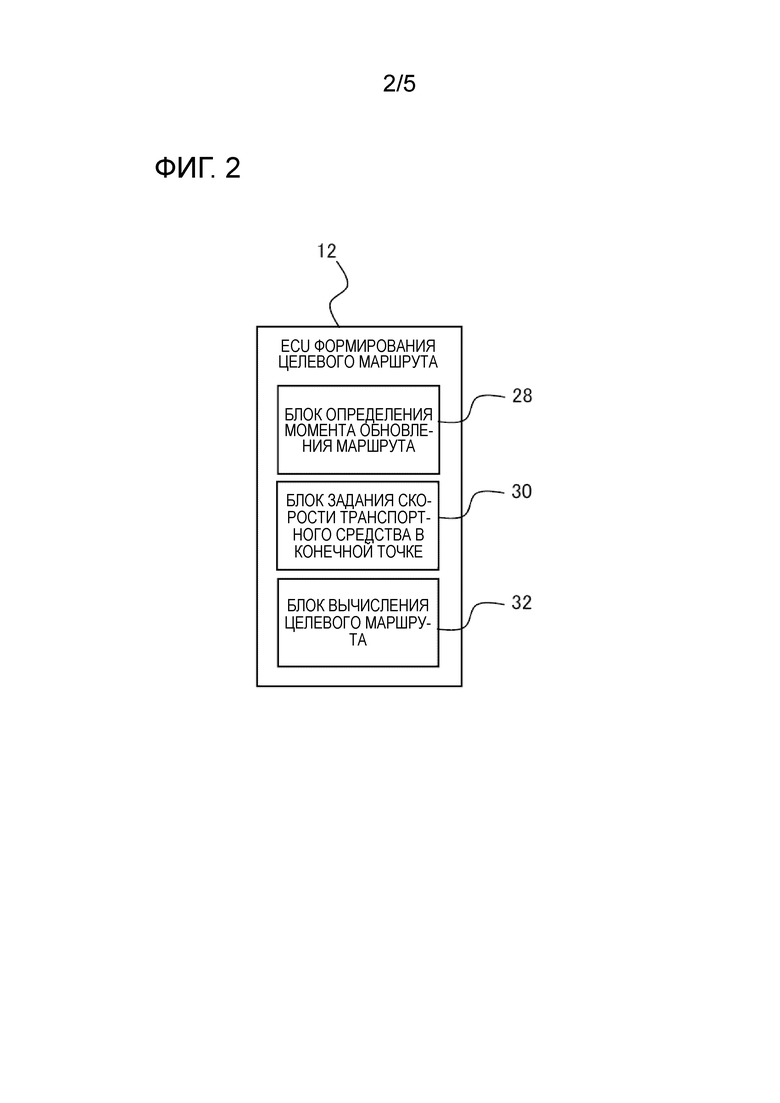
Фиг. 2 - это блок-схема, иллюстрирующая ECU формирования целевого маршрута блока управления приведением в движение.
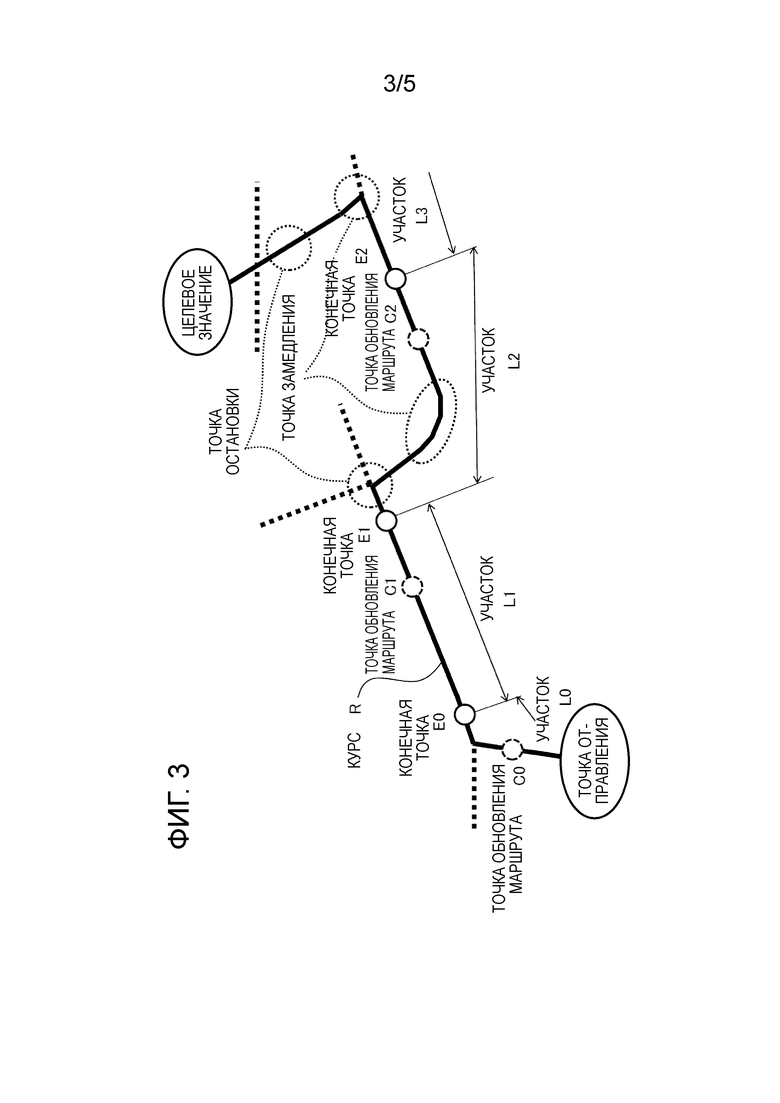
Фиг. 3 - это схематичный вид, описывающий обновление целевого маршрута.
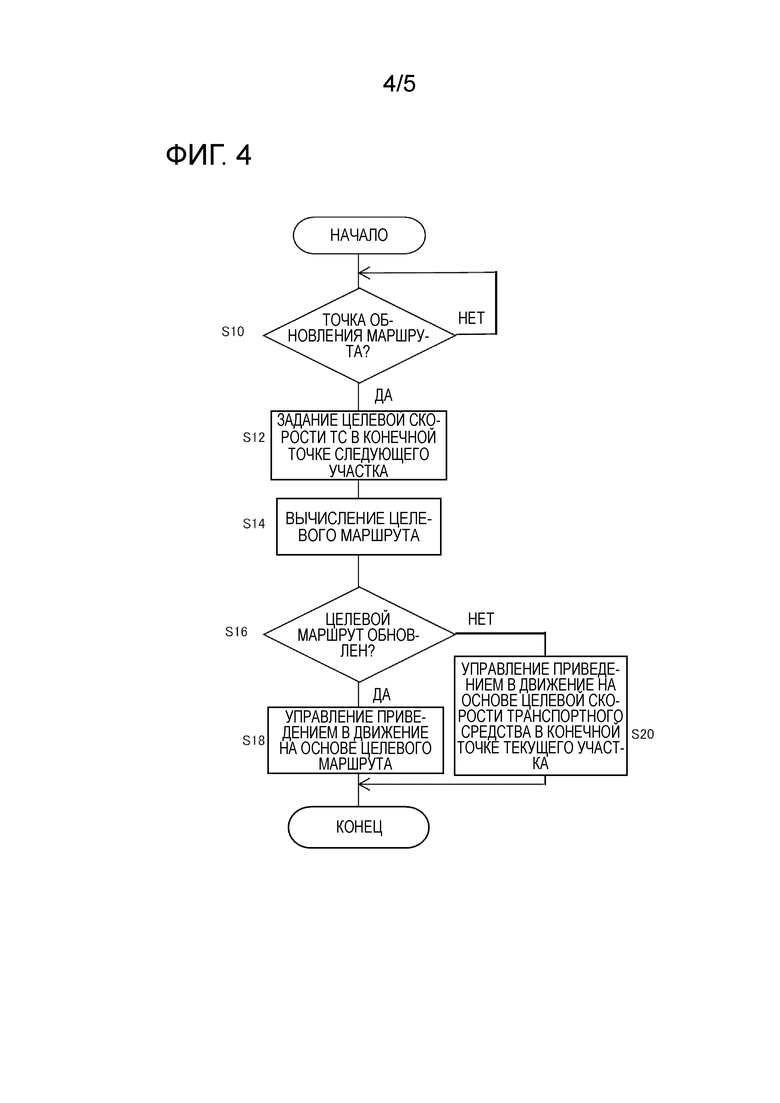
Фиг. 4 - это блок-схема последовательности операций, описывающая формирование целевого маршрута.
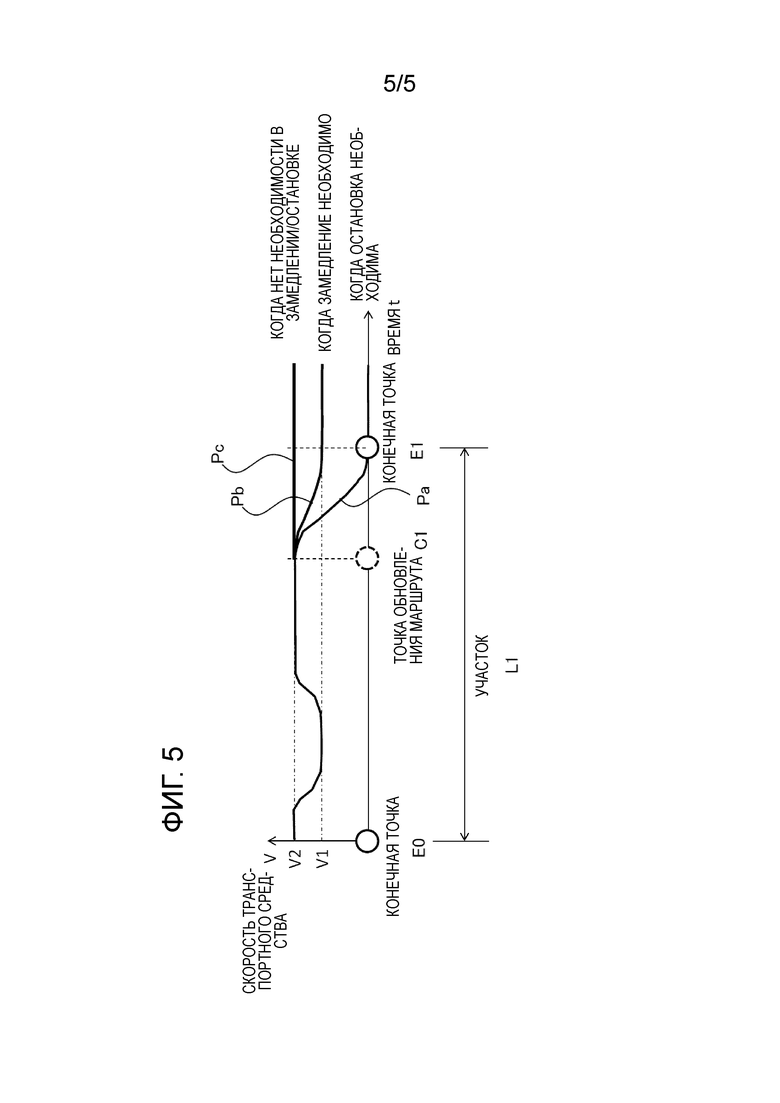
Фиг. 5 - это схематичный вид, иллюстрирующий настройку целевой скорости транспортного средства, когда обновление целевого маршрута не завершено.
Варианты осуществления для выполнения изобретения
[0010] (1) Вариант осуществления
Устройство 10 управления приведением в движение согласно варианту осуществления будет описано со ссылкой на фиг. 1-5.
[0011] Фиг. 1 - это блок-схема, иллюстрирующая устройство 10 управления приведением в движение согласно одному варианту осуществления изобретения. Устройство 10 управления приведением в движение - это устройство, установленное в транспортном средстве, и устройство для автономного управления приведением в движение транспортного средства по курсу (маршруту) от пункта отправления до пункта назначения, который вычисляется с помощью навигационной технологии, или т.п. В частности, устройство 10 управления приведением в движение делит курс от пункта отправления до пункта назначения на предварительно определенные участки, обновляет целевой маршрут, который показывает траекторию приведения в движение транспортного средства и поведение транспортного средства (например, скорость транспортного средства, ускорение, угол поворота рулевого колеса и т.д.) для каждого участка, и управляет приведением в движение транспортного средства на основе целевого маршрута.
[0012] Устройство 10 управления приведением в движение содержит ECU (электронный блок управления) 12 формирования целевого маршрута и ECU 14 управления приведением в движение, как иллюстрировано на фиг. 1. Кроме того, радар 16, камера 18, датчик 20 определения состояния приведения в движение, датчик 22 определения рабочего состояния, навигационная система 24 и т.п. электрически соединяются с устройством 10 управления приведением в движение, как иллюстрировано на фиг. 1. Кроме того, исполнительный механизм (актуатор) 26 для управления приведением в движение электрически соединяется с устройством 10 управления приведением в движение. Устройство 10 управления приведением в движение может быть соответственно соединено с другими хорошо известными конфигурациями, такими как блок связи, для выполнения связи между транспортными средствами.
[0013] ECU 12 формирования целевого маршрута и ECU 14 управления приведением в движение, каждый, являются электронными блоками управления, содержат CPU (центральный процессор) и память, такую как ROM (постоянное запоминающее устройство) и RAM (оперативное запоминающее устройство). ECU 12 формирования целевого маршрута получает картографическую информацию и курс от пункта отправления до пункта назначения, найденный посредством навигационной системы 24, и вычисляет целевой маршрут, который представляет траекторию приведения в движение транспортного средства и поведение транспортного средства для каждого предварительно определенного участка, который задан по курсу. ECU 14 управления приведением в движение управляет приведением в движение транспортного средства на основе целевого маршрута, сформированного посредством ECU 12 формирования целевого маршрута. Например, ECU 14 управления приведением в движение вычисляет величину управления приведением в движение для рассматриваемого транспортного средства, такую как ускорение/замедление и угол поворота рулевого колеса, на основе целевого маршрута, сформированного посредством ECU 12 формирования целевого маршрута, а также данных от радара 16, камеры 18, датчика 20 определения состояния приведения в движение, датчика 22 определения рабочего состояния и навигационной системы 24. Кроме того, ECU 14 управления приведением в движение управляет исполнительным механизмом 26 для управления приведением в движение на основе величины управления приведением в движение. На фиг. 1 ECU 12 формирования целевого маршрута и ECU 14 управления приведением в движение описываются как независимые ECU, но оба могут быть сконфигурированы как единое целое при необходимости.
[0014] Радар 16 обнаруживает присутствие, позицию и скорость, также как относительную скорость относительно рассматриваемого транспортного средства, для транспортного средства, мотоцикла, велосипеда, пешехода и т.п., окружающих рассматриваемое транспортное средство. Радар 16 содержит, например, лазерный радар, радар миллиметрового диапазона, ультразвуковой радар или т.п. Радар 16 выводит обнаруженные данные в устройство 10 управления приведением в движение. Поскольку хорошо известный радар может быть соответствующим образом использован в качестве радара 16, подробное описание конфигурации будет опущено.
[0015] Камера 18, например, прикрепляется к передней или боковой части рассматриваемого транспортного средства и захватывает изображение окружения рассматриваемого транспортного средства. Например, камера 18 захватывает полосы участка дороги и препятствия по курсу. Камера 18 содержит элемент формирования изображения, такой как CCD (устройство с зарядовой связью) или CMOS (комплементарный металло-оксидный полупроводник). Камера 18 выводит захваченное изображение в устройство 10 управления приведением в движение. Поскольку хорошо известная камера может быть соответствующим образом использована в качестве камеры 18, подробное описание конфигурации будет опущено.
[0016] Датчик 20 определения состояния приведения в движение определяет состояние приведения в движение (например, скорость транспортного средства, ускорение, угол поворота вокруг вертикальной оси и т.д.) рассматриваемого транспортного средства. Датчик 20 определения состояния приведения в движение имеет, например, датчик скорости колеса, предусмотренный для каждого колеса рассматриваемого транспортного средства, и определяет состояние приведения в движение рассматриваемого транспортного средства, такое как скорость транспортного средства, измеряя скорость колеса. Датчик 20 определения состояния приведения в движение выводит обнаруженное состояние приведения в движение рассматриваемого транспортного средства в устройство 10 управления приведением в движение. Поскольку хорошо известный датчик скорости транспортного средства, датчик ускорения и датчик угла поворота вокруг вертикальной оси могут быть использованы в качестве датчика 20 определения состояния приведения в движение, подробное описание конфигурации будет опущено.
[0017] Датчик 22 определения рабочего состояния определяет рабочее состояние рассматриваемого транспортного средства. В частности, датчик 22 определения рабочего состояния обнаруживает приведение в действие акселератора, приведение в действие тормоза, приведение в действие рулевого колеса (руление) и т.п. пользователем, который едет в транспортном средстве (далее в данном документе называемым водителем). Датчик 22 определения рабочего состояния выводит обнаруженное рабочее состояние рассматриваемого транспортного средства в устройство 10 управления приведением в движение. Поскольку хорошо известный датчик приведения в действие акселератора, датчик приведения в действие тормоза и датчик рулевого управления могут быть использованы в качестве датчика 22 определения рабочего состояния, подробное описание конфигурации будет опущено.
[0018] Навигационная система 24 принимает GPS-сигналы от GPS-спутника (системы глобального позиционирования). Кроме того, навигационная система 24 может содержать гироскоп, который обнаруживает величину поворотного приведения в движение, применяемого к транспортному средству, датчик ускорения, который определяет расстояние приведения в движение транспортного средства из ускорения в трех осевых направлениях, и т.п., и геомагнитный датчик, который определяет направление приведения в движение транспортного средства из геомагнетизма или т.п. Навигационная система 24 хранит картографическую информацию (дорожную информацию) на носителе хранения, таком как жесткий диск. Эта картографическая информация содержит информацию, относящуюся к местоположениям и формам дорог и перекресткам, и к правилам дорожного движения, включающим в себя дорожные знаки, сигналы и т.п. Кроме того, картографическая информация может задавать область приведения в движение транспортного средства на полосе движения на дороге. Навигационная система 24 обнаруживает позицию рассматриваемого транспортного средства и ориентацию относительно дороги, на основе картографической информации и GPS-сигналов от GPS-спутника. Навигационная система 24 отыскивает курс от пункта отправления до пункта назначения, согласно входным данным о пункте отправления (или текущей позиции) и пункте назначения, и выполняет направление по маршруту до пункта назначения, с помощью найденного курса и позиционной информации рассматриваемого транспортного средства. Кроме того, навигационная система 24 выводит найденный курс устройству 10 управления приведением в движение вместе с картографической информацией. Поскольку хорошо известная навигационная система может быть соответствующим образом использована в качестве навигационной системы 24, подробное описание конфигурации будет опущено.
[0019] Исполнительный механизм 26 для управления приведением в движение содержит исполнительный механизм ускорения/замедления для ускорения и замедления рассматриваемого транспортного средства и исполнительный механизм рулевого управления, который регулирует угол поворота рулевого колеса. Исполнительный механизм 26 управления приведением в движение управляет приведением в движение рассматриваемого транспортного средства, инструктируя исполнительному механизму ускорения/замедления и исполнительному механизму рулевого управления срабатывать, на основе величины управления приведением в движение, которая передается от ECU 14 управления приведением в движение.
[0020] Далее, формирование целевого маршрута посредством ECU 12 формирования целевого маршрута будет описано со ссылкой на фиг. 2-5. ECU 12 формирования целевого маршрута содержит блок 28 определения момента обновления маршрута, блок 30 задания скорости транспортного средства в конечной точке и блок 32 вычисления целевого маршрута, как иллюстрировано на фиг. 2.
[0021] ECU 12 формирования целевого маршрута получает картографическую информацию и курс от пункта отправления до пункта назначения, найденный посредством навигационной системы 24, вычисляет целевой маршрут, который представляет траекторию приведения в движение транспортного средства и поведение транспортного средства для каждого предварительно определенного участка, который задан по курсу, и обновляет целевой маршрут для каждого участка. В частности, ECU 12 формирования целевого маршрута получает картографическую информацию вместе с курсом R от пункта отправления до пункта назначения, найденным посредством навигационной системы 24, как иллюстрировано на фиг. 3. Затем, ECU 12 формирования целевого маршрута делит курс R от пункта отправления до пункта назначения на предварительно определенные участки и обновляет целевой маршрут для каждого участка. В настоящем варианте осуществления, например, участки задаются посредством деления курса R каждые 200 м. Конечно, способ деления участков не ограничивается этим расстоянием и может быть расстоянием, которое отличается от этого расстояния. Кроме того, необязательно, чтобы участки были разделены на одинаковые расстояния, и способ деления может быть изменен при необходимости. Некоторые из последовательных участков, разделенных таким образом, указываются как участок L0, участок L1, участок L2, участок L3... на фиг. 3.
[0022] Кроме того, точка обновления маршрута для обновления целевого маршрута задается в каждом из участков. На фиг. 3 точки обновления маршрута для участков L0, L1 и L2 соответственно указываются как точки C0, C1 и C2 обновления маршрута. В настоящем варианте осуществления, когда рассматриваемое транспортное средство проезжает точку обновления маршрута участка с помощью навигационной системы 24, или т.п., ECU 12 формирования целевого маршрута вычисляет целевой маршрут от точки обновления маршрута до конечной точки следующего участка и обновляет целевой маршрут. На фиг. 3, например, когда рассматриваемое транспортное средство проезжает точку C1 обновления маршрута для участка L1, ECU 12 формирования целевого маршрута вычисляет целевые маршруты от точки C1 обновления маршрута до конечной точки E1 для участка L1 и от конечной точки E1 для участка L1 (точки начала участка L2) до конечной точки E2 для участка L2 и обновляет целевой маршрут, который в настоящее время используется, вновь вычисленным целевым маршрутом. То же обновление целевого маршрута также выполняется на участке L2. В частности, когда рассматриваемое транспортное средство проезжает точку C2 обновления маршрута участка L2, ECU 12 формирования целевого маршрута вычисляет целевые маршруты от точки C2 обновления маршрута до конечной точки E2 участка L2, и от конечной точки E2 участка L2 (точки начала участка L3) до конечной точки участка L3, и обновляет целевой маршрут, вычисленный в точке C1 обновления маршрута участка L1, вновь вычисленным целевым маршрутом. В настоящем варианте осуществления, например, точка обновления маршрута задается в позицию перед конечной точкой участка на предварительно определенном расстоянии (т.е., позицию, в которой оставшееся расстояние участка становится предварительно определенным расстоянием). Например, в настоящем варианте осуществления, это предварительно определенное расстояние устанавливается равным 50 м. Конечно, позиция точки обновления маршрута не ограничивается этой позицией и может быть позицией, которая отличается от этой позиции. Кроме того, точка обновления маршрута может быть задана в позиции, в которой время, остающееся до того момента, когда транспортное средство достигает конечной точки участка, становится предварительно определенным временем или менее.
[0023] ECU 12 формирования целевого маршрута настоящего варианта осуществления является устройством, которое задает скорость транспортного средства в конечной точке участка, так что приведение в движение транспортного средства управляется с надлежащей скоростью транспортного средства, даже в случае, в котором вычисление нового целевого маршрута не завершено в точке обновления маршрута, по таким причинам как вычисление нового целевого маршрута в точке обновления маршрута, занимающее время.
[0024] Работа блока 28 определения момента обновления маршрута, блока 30 задания скорости транспортного средства в конечной точке и блока 32 вычисления целевого маршрута ECU 12 формирования целевого маршрута, а также работа ECU 14 управления приведением в движение, согласно настоящему варианту осуществления будет описана со ссылкой на блок-схему последовательности операций на фиг. 4. Формирование целевого маршрута в точке C1 обновления маршрута для участка L1 будет описано ниже, но то же формирование целевых маршрутов также выполняется на других участках.
[0025] Блок 28 определения момента обновления маршрута определяет, проехало или нет транспортное средство точку C1 обновления маршрута для участка L1, по которому транспортное средство в настоящий момент движется, из информации о местоположении рассматриваемого транспортного средства, которая может быть получена от навигационной системы 24, или т.п. (этап S10). Если блок 28 определения момента обновления маршрута определяет, что транспортное средство проехало точку C1 обновления маршрута (Да на этапе S10), блок 30 задания скорости транспортного средства в конечной точке задает целевую скорость транспортного средства в конечной точке E2 следующего участка L2 (этап S12).
[0026] При задании целевой скорости транспортного средства целевая скорость транспортного средства в конечной точке E2 участка L2 задается на основе картографической информации для участка L3, который является участком после конечной точки E2, и т.п. В частности, блок 30 задания скорости транспортного средства в конечной точке получает данные, такие как точки остановки и точки замедления, которые содержатся на участке L3, и требуемые величины замедления в точках замедления, на основе картографической информации, полученной от навигационной системы 24, или т.п., и задает целевую скорость транспортного средства в конечной точке E2 участка L2 согласно этим данным.
[0027] Например, после определения, что участок L3 содержит точки остановки, такие как знаки остановки и светофоры, на основе правил дорожного движения, содержащихся в картографической информации, или т.п., блок 30 задания скорости транспортного средства в конечной точке задает целевую скорость транспортного средства в конечной точке E2 участка L2 до 0 (остановка). Необязательно, чтобы целевая скорость транспортного средства была предоставлена как значение скорости транспортного средства (т.е. 0); целевая скорость транспортного средства может быть предоставлена как степень замедления (в этом случае замедление 100%).
[0028] Кроме того, при определении, что участок L3 содержит точки, в которых ограничение скорости становится низким, на основе правил дорожного движения, содержащихся в картографической информации, или при определении, что участок L3 содержит повороты и изгибы, на основе информации о дорогах и перекрестках, содержащейся в картографической информации, блок 30 задания скорости транспортного средства в конечной точке дополнительно определяет требуемую величину замедления в этих точках замедления. Например, если участок L3 содержит точку замедления, в которой ограничение скорости уменьшается от 60 км/ч до 40 км/ч, целевая скорость транспортного средства в конечной точке участка L2 задается равной 40 км/ч. Или, например, если участок L3 содержит перекресток или изгиб, который требует замедления, предварительно определенная скорость транспортного средства, которая задается заранее в соответствии с кривизной перекрестка или изгиба, задается в качестве целевой скорости транспортного средства. Например, предварительно определенная скорость транспортного средства сохраняется в памяти ECU 12 формирования целевого маршрута заранее, так что предварительно определенная скорость транспортного средства уменьшается, когда кривизна увеличивается. Необязательно, чтобы целевая скорость транспортного средства была предоставлена как значение скорости транспортного средства; целевая скорость транспортного средства может быть предоставлена как степень замедления (например, замедление в 40%).
[0029] Если участок L3 содержит и точку остановки, и точку замедления, целевая скорость транспортного средства в конечной точке E2 участка L2 может быть задана равной 0 (остановка). Если участок L3 содержит множество точек замедления, наименьшая целевая скорость транспортного средства среди целевых скоростей транспортного средства для точек замедления может быть задана в качестве целевой скорости транспортного средства.
[0030] Кроме того, при определении, что участок L3 не содержит точки остановки или точки замедления, на основе картографической информации, блок 30 задания скорости транспортного средства в конечной точке определяет, что необязательно замедляться/останавливаться в конечной точке E2 участка L2. Например, цель предоставляется как степень замедления (в этом случае замедление 0%).
[0031] В настоящем варианте осуществления блок 30 задания скорости транспортного средства в конечной точке определяет, содержит или нет участок L3 точки остановки или точки замедления, на основе картографической информации, полученной от навигационной системы 24, или т.п., но может определять, содержит или нет участок L3 точки остановки или точки замедления, другими способами. Например, представляется возможным определять, содержит или нет участок L3 точки остановки или точки замедления, на основе данных, которые могут быть получены от радара 16 или камеры 18. Дополнительно, в настоящем варианте осуществления, определяется, содержит или нет участок L3 точки остановки или точки замедления, но участок как цель определения не ограничивается этим. Например, необязательно, чтобы целью был весь участок L3; например, фрагмент участка L3, такой как участок, который является предварительно определенным расстоянием после конечной точки E2 участка L2, может быть задан в качестве цели определения.
[0032] Целевая скорость транспортного средства (или степень замедления) в конечной точке E2 участка L2, заданная способом, описанным выше, сохраняется в памяти ECU 12 формирования целевого маршрута как целевая скорость Vn транспортного средства в конечной точке следующего участка, отдельно от целевой скорости Vp транспортного средства в конечной точке текущего участка. Т.е., если целевая скорость транспортного средства в конечной точке следующего участка (например, целевая скорость транспортного средства в конечной точке E2 участка L2) задается на этапе S12, целевая скорость транспортного средства, которая была сохранена в качестве целевой скорости Vn транспортного средства в конечной точке следующего участка (например, целевая скорость транспортного средства в конечной точке E1 участка L1, которая была задана в точке C0 обновления маршрута участка L0), вновь сохраняется как целевая скорость Vp транспортного средства в конечной точке текущего участка, и вновь заданная целевая скорость транспортного средства в конечной точке следующего участка сохраняется как целевая скорость Vn транспортного средства в конечной точке следующего участка.
[0033] Блок 32 вычисления целевого маршрута начинает вычисление нового целевого маршрута (этап S14). В частности, блок 32 вычисления целевого маршрута вычисляет целевые маршруты от точки C1 обновления маршрута до конечной точки E1 участка L1 и от конечной точки E1 участка L1 (начальной точки участка L2) до конечной точки E2 участка L2. Например, блок 32 вычисления целевого маршрута формирует функцию времени для целевой скорости транспортного средства (профиль скорости транспортного средства), в которой фактическая скорость транспортного средства в точке C1 обновления маршрута является началом отсчета. Этот профиль скорости транспортного средства сохраняется в памяти, или т.п., в качестве нового целевого маршрута, вместе с целевой траекторией приведения в движение транспортного средства и функцией времени для целевой величины рулевого управления (профиль рулевого управления), которые формируются отдельно, чтобы обновлять целевой маршрут, который в настоящее время используется. Блок 32 вычисления целевого маршрута формирует этот профиль скорости транспортного средства после дополнительного рассмотрения картографической информации последующего участка L2, которая получается от навигационной системы 24, тем же образом, что и хорошо известные способы вычисления целевого маршрута. Тем же образом, блок 32 вычисления целевого маршрута формирует целевую траекторию приведения в движение и профиль рулевого управления, на основе картографической информации следующего участка L2, которая получается от навигационной системы 24, тем же образом, что и хорошо известные способы вычисления целевого маршрута. Например, в этом типе вычисления целевого маршрута целевые маршруты, такие как целевая траектория приведения в движение, профиль скорости транспортного средства и профиль рулевого управления, формируются так, что поперечное ускорение, которое применяется к транспортному средству, становится меньше или равно 0,2 G, в соответствии с кривизной курса, которая получается из картографической информации.
[0034] Далее, блок 32 вычисления целевого маршрута определяет, был или нет обновлен целевой маршрут (этап S16). В частности, определяется, действительно или нет вычисление было завершено, и целевой маршрут был обновлен в течение предварительно определенного времени от начала вычисления нового целевого маршрута, на этапе S14. В настоящем варианте осуществления это предварительно определенное время задается, например, равным 0,5 секунд, но предварительно определенное время не ограничивается этим значением и может быть значением, которое отличается от этого значения.
[0035] При определении, что целевой маршрут был обновлен (Да на этапе S16), ECU 14 управления приведением в движение управляет приведением в движение транспортного средства на основе нового целевого маршрута, сохраненного в памяти ECU 12 формирования целевого маршрута (этап S18).
[0036] С другой стороны, при определении, что вычисление и обновление целевого маршрута не были завершены в течение предварительно определенного времени (Нет на этапе S16), ECU 14 управления приведением в движение получает целевую скорость Vp транспортного средства в конечной точке текущего участка, которая сохраняется в памяти, или т.п., ECU 12 формирования целевого маршрута, в качестве целевой скорости транспортного средства в конечной точке E1 участка L1 (этап S20). Такие случаи, в которых вычисление и обновление целевого маршрута не завершаются в течение предварительно определенного времени, могут быть случаем, в котором картографическая информация от навигационной системы 24 не может быть надлежащим образом получена, или случаем, в котором вычисление занимает время, вследствие того, что картографическая информация является сложной, такой как имеющая большое число перекрестков и изгибов на участке от точки C1 обновления маршрута до конечной точки E2. Дополнительно, ECU 14 управления приведением в движение управляет приведением в движение транспортного средства на основе полученной целевой скорости Vp транспортного средства в конечной точке текущего участка (этап S20). В частности, ECU 14 управления приведением в движение управляет приведением в движение транспортного средства так, что скорость транспортного средства плавно становится целевой скоростью Vp транспортного средства в конечной точке E1 участка L1, с фактической скоростью транспортного средства в настоящий момент в качестве точки начала отсчета.
[0037] Фиг. 5 иллюстрирует управление приведением в движение транспортного средства на участке L1 (участке от конечной точки E0 участка L0 до конечной точки E1 участка L1) посредством устройства 10 управления приведением в движение настоящего варианта осуществления. Целевой маршрут (целевая скорость транспортного средства), который формируется в точке C0 обновления маршрута участка L0, предоставляется от конечной точки E0 до точки C1 обновления маршрута, как иллюстрировано на фиг. 5. С другой стороны, если целевой маршрут не может быть обновлен в точке C1 обновления маршрута (Нет на этапе S16), приведение в движение транспортного средства управляется на основе целевой скорости транспортного средства в конечной точке E1 участка L1, которая задается в точке C0 обновления маршрута участка L0. Например, при задании целевой скорости транспортного средства в конечной точке E1 участка L1, которое выполняется в точке C0 обновления маршрута участка L0 (этап S12), при определении, что необходимо останавливаться в конечной точке E1 участка L1, управление приведением в движение выполняется так, что скорость транспортного средства становится 0 (остановка) в конечной точке E1 участка L1 (ссылка на профиль Pa скорости транспортного средства). Дополнительно, например, в этой настройке целевой скорости транспортного средства, при определении, что необходимо замедляться до скорости V1 транспортного средства в конечной точке E1 участка L1, управление приведением в движение выполняется так, что скорость транспортного средства замедляется до V1 в конечной точке E1 участка L1 (ссылаясь на профиль Pb скорости транспортного средства). Дополнительно, например, в этой настройке целевой скорости транспортного средства, при определении, что необязательно замедляться/останавливаться в конечной точке E1 участка L1, управление приведением в движение выполняется, чтобы поддерживать скорость транспортного средства в V2 до конечной точки E1 участка L1 (ссылаясь на профиль Pc скорости транспортного средства).
[0038] В таком обновлении целевого маршрута, например, также представляется возможным задавать заранее целевой маршрут так, что транспортное средство равномерно останавливается в конечной точке участка, если вычисление нового целевого маршрута не завершается в точке обновления маршрута, вследствие того, что вычисление нового целевого маршрута занимает время. Однако, управление, которое равномерно останавливает транспортное средство таким образом, будет приводить к чрезмерному замедлению, если не существует действительной необходимости останавливаться в конечной точке участка. Кроме того, если целевой маршрут обновляется после этого, замедление и ускорение повторяются, и существует вероятность, что пользователь почувствует дискомфорт в ходовых качествах.
[0039] С другой стороны, в настоящем варианте осуществления, целевая скорость транспортного средства в конечной точке следующего участка задается в точке обновления маршрута на основе точек остановки и точек замедления на участке после конечной точки. Соответственно, становится возможным предотвращать ненужное замедление и уменьшать дискомфорт, который чувствуется пользователем при обновлении целевого маршрута.
[0040] Как описано выше, ECU 12 формирования целевого маршрута (устройство формирования целевой скорости транспортного средства) согласно настоящему варианту осуществления содержит блок 32 вычисления целевого маршрута (блок формирования), который формирует целевой маршрут в точке обновления маршрута (предварительно определенный момент времени) для управления приведением в движение транспортного средства на предварительно определенном участке (например, участке L2), и блок 30 задания скорости транспортного средства в конечной точке (блок настройки), который задает целевую скорость транспортного средства заранее в конечной точке (например, конечной точке E1) (конечной точке участка) участка (например, участка L1), на котором транспортное средство в настоящий момент движется, которая является целевой скоростью транспортного средства, которая используется, когда блок 32 вычисления целевого маршрута (блок формирования) не может сформировать целевой маршрут в точке обновления маршрута (предварительно определенный момент времени), при этом блок 30 задания скорости транспортного средства в конечной точке (блок настройки) задает целевую скорость транспортного средства на основе картографической информации (дорожной информации) на предварительно определенном участке (например, участке L2). Соответственно, становится возможным предоставлять ECU 12 формирования целевого маршрута (устройство формирования целевого маршрута), который уменьшает дискомфорт, который чувствуется пользователем при обновлении целевого маршрута.
[0041] Кроме того, ECU 12 формирования целевого маршрута (устройство формирования целевого маршрута) может дополнительно содержать блок 28 определения момента обновления маршрута (блок определения), который определяет момент, в который транспортное средство достигает позиции, которая находится перед конечной точкой участка (например, конечной точкой E1 участка L1) на предварительно определенном расстоянии, или позиции, в которой оставшееся время до достижения конечной точки участка становится предварительно определенным временем или менее (предварительно определенной позиции), в качестве точки обновления маршрута (предварительно определенного момента времени). Соответственно, становится возможным формировать целевой маршрут в момент времени, в который транспортное средство достигает предварительно определенной позиции.
[0042] Дополнительно, в ECU 12 формирования целевого маршрута (устройстве формирования целевого маршрута), предварительно определенный участок (например, участок L2) может включать в себя следующий участок для участка, на котором транспортное средство в настоящий момент движется (например, участок L1), и блок 32 вычисления целевого маршрута (блок формирования) может формировать целевой маршрут для предварительно определенного участка (например, участка L2), когда транспортное средство достигает позиции, которая находится перед конечной точкой (например, конечной точкой E1 участка L1) на предварительно определенном расстоянии, или позиции, в которой оставшееся время до достижения конечной точки участка становится предварительно определенным временем или менее (предварительно определенной позиции). Соответственно, становится возможным формировать целевой маршрут для следующего участка в момент времени, в который транспортное средство достигает предварительно определенной позиции участка, на котором транспортное средство в настоящий момент движется.
[0043] Кроме того, в ECU 12 формирования целевого маршрута (устройстве формирования целевого маршрута), блок 30 задания скорости транспортного средства в конечной точке (блок настройки) может задавать целевую скорость транспортного средства, пока транспортное средство движется на участке (например, участке L0) перед участком, на котором транспортное средство движется в настоящий момент (например, участке L1). Соответственно, целевая скорость транспортного средства, которая задается заранее на предыдущем участке, может быть использована, даже в случае, в котором блок 32 вычисления целевого маршрута (блок формирования) не может сформировать целевой маршрут в точке обновления маршрута (предварительно определенный момент времени).
[0044] Кроме того, в ECU 12 формирования целевого маршрута (устройстве формирования целевого маршрута), блок 30 задания скорости транспортного средства в конечной точке (блок настройки) может задавать целевую скорость транспортного средства заранее на основе точек остановки или точек замедления транспортного средства на предварительно определенном участке (например, участке L2) в картографической информации (дорожной информации). Соответственно, представляется возможным надлежащим образом задавать целевую скорость транспортного средства в конечной точке участка для участка, на котором транспортное средство в настоящий момент движется, в соответствии с точками остановки или точками замедления транспортного средства на предварительно определенном участке.
[0045] Как описано выше, устройство 10 управления приведением в движение согласно настоящему варианту осуществления содержит ECU 12 формирования целевого маршрута (устройство формирования целевой скорости транспортного средства) и ECU 14 управления приведением в движение (устройство управления), который управляет приведением в движение транспортного средства, на основе целевого маршрута, который формируется посредством ECU 12 формирования целевого маршрута. Соответственно, представляется возможным предоставлять устройство 10 управления приведением в движение, которое способно уменьшать дискомфорт, который чувствуется пользователем при обновлении целевого маршрута.
[0046] Кроме того, ECU 14 управления приведением в движение (устройство управления) может управлять приведением в движение транспортного средства на основе целевой скорости транспортного средства, в случае, в котором блок 32 вычисления целевого маршрута (блок формирования) не может сформировать целевой маршрут в точке обновления маршрута (предварительно определенный момент времени) (Нет на этапе S16 на фиг. 4). Соответственно, приведение в движение транспортного средства может управляться на основе целевой скорости транспортного средства, которая задается заранее, даже в случае, в котором блок 32 вычисления целевого маршрута (блок формирования) не может формировать целевой маршрут в точке обновления маршрута (предварительно определенный момент времени).
[0047] Дополнительно, ECU 14 управления приведением в движение (устройство управления) может управлять приведением в движение транспортного средства, по меньшей мере, вплоть до конечной точки (например, конечной точки E1) (конечной точки участка) участка, на котором транспортное средство в настоящий момент движется (например, участка L1), на основе целевой скорости транспортного средства (например, профилей Pa, Pb, Pc скорости транспортного средства). Соответственно, приведение в движение транспортного средства может управляться на основе целевой скорости транспортного средства, которая задается заранее, даже в случае, в котором блок 32 вычисления целевого маршрута (блок формирования) не может формировать целевой маршрут в точке обновления маршрута (предварительно определенный момент времени), по меньшей мере, вплоть до конечной точки (например, конечной точки E1) (конечной точки участка) участка, на котором транспортное средство в настоящий момент движется (например, участка L1).
[0048] Кроме того, ECU 14 управления приведением в движение (устройство управления) может управлять приведением в движение транспортного средства, по меньшей мере, в фрагменте участка для предварительно определенного участка (например, участка L2), на основе целевой скорости транспортного средства (например, профилей Pa, Pb, Pc скорости транспортного средства). Соответственно, приведение в движение транспортного средства может управляться на основе целевой скорости транспортного средства, которая задается заранее, даже в случае, в котором блок 32 вычисления целевого маршрута (блок формирования) не может формировать целевой маршрут в точке обновления маршрута (предварительно определенный момент времени), за конечной точкой (например, конечной точкой E1) (конечной точкой участка) участка, на котором транспортное средство в настоящий момент движется (например, участка L1).
[0049] Кроме того, ECU 14 управления приведением в движение (устройство управления) может управлять приведением в движение транспортного средства на основе целевой скорости транспортного средства, в случае, в котором блок 32 вычисления целевого маршрута (блок формирования) не может сформировать целевой маршрут в точке обновления маршрута (предварительно определенный момент времени) в течение предварительно определенного времени (Нет на этапе S16 на фиг. 4). Соответственно, становится легко определять случаи, в которых блок 32 вычисления целевого маршрута (блок формирования) не может сформировать целевой маршрут в точке обновления маршрута (предварительно определенный момент времени).
[0050] (2) Модифицированные примеры
Устройство 10 управления приведением в движение было описано подробно выше, но устройство 10 управления приведением в движение не ограничивается вышеописанным вариантом осуществления. Дополнительно, само собой разумеется, что различные улучшения и модификации могут быть выполнены без отступления от духа настоящего изобретения.
[0051] (2-1) Модифицированный пример 1
В настоящем варианте осуществления задание целевой скорости транспортного средства (этап S12) и вычисление целевого маршрута (этап S14) выполняются, когда определяется, что транспортное средство проехало точку обновления маршрута (Да на этапе S10), как иллюстрировано на фиг. 4. Кроме того, определяется, было или нет вычисление завершено в течение предварительно определенного времени после начала вычисления целевого маршрута (этап S16). Однако, точка начала обновления маршрута может быть задана, заранее, перед точкой обновления маршрута в позиции, которая находится на предварительно определенном расстоянии от точки обновления маршрута. В этом случае задание целевой скорости транспортного средства (этап S12) и вычисление целевого маршрута (этап S14) может начинаться, когда определяется, что транспортное средство проехало точку начала обновления маршрута, и может быть определено, был или нет целевой маршрут обновлен в точке обновления маршрута (этап S16). Дополнительно, в этом случае, может быть определено, было или нет завершено вычисление целевого маршрута в течение предварительно определенного времени после того, как транспортное средство проезжает точку начала обновления маршрута, и обновление на вновь вычисленный целевой маршрут может быть выполнено в точке обновления маршрута, если вычисление целевого маршрута было завершено, и управление приведением в движение на основе заданной целевой скорости транспортного средства может выполняться в точке обновления маршрута, если вычисление целевого маршрута не было завершено.
[0052] (2-2) Модифицированный пример 2
В настоящем варианте осуществления вычисление целевого маршрута (этап S14), определение того, был или нет обновлен целевой маршрут (этап S16), управление приведением в движение на основе целевого маршрута (этап S18) и управление приведением в движение на основе целевой скорости Vp транспортного средства в конечной точке текущего участка (этап S20) выполняются после выполнения задания целевой скорости Vn транспортного средства в конечной точке следующего участка (этап S12), как иллюстрировано на фиг. 4. Однако, порядок этих процессов может быть надлежащим образом изменен. Например, вычисление целевого маршрута (этап S14), определение того, был или нет обновлен целевой маршрут (этап S16), управление приведением в движение на основе целевого маршрута (этап S18) и управление приведением в движение на основе целевой скорости транспортного средства в конечной точке текущего участка (этап S20) могут выполняться перед заданием целевой скорости транспортного средства в конечной точке следующего участка (этап S12). В этом случае, блок 30 задания скорости транспортного средства в конечной точке задает целевую скорость транспортного средства в конечной точке следующего участка (этап S12), после того как ECU 14 управления приведением в движение считывает целевую скорость транспортного средства в конечной точке текущего участка, сохраненную в памяти, или т.п., ECU 12 формирования целевой скорости, в управлении приведением в движение на основе целевой скорости транспортного средства в конечной точке текущего участка (этап S20). Соответственно, необязательно отдельно сохранять целевую скорость транспортного средства в конечной точке текущего участка и целевую скорость транспортного средства для следующего участка в памяти ECU 12 формирования целевого маршрута; достаточно просто сохранять целевую скорость транспортного средства, которая вновь задается на этом этапе S12, посредством перезаписи.
[0053] (2-3) Модифицированный пример 3
Как описано с помощью фиг. 4, в настоящем варианте осуществления, при задании целевой скорости транспортного средства в конечной точке E2 следующего участка L2, если участок L3 содержит точку остановки, целевая скорость транспортного средства в конечной точке E2 участка L2 задается равной 0 (остановка). Однако, степень замедления может быть изменена в соответствии с позицией этой точки остановки на участке L3. Например, приведение в движение может управляться с предварительно определенной целевой скоростью транспортного средства без остановки в конечной точке E2 участка L2, если эта точка остановки находится на расстоянии от конечной точки E2, большем или равном предварительно определенному расстоянию, которое задано заранее. Кроме того, степень замедления до конечной точки E2 участка L2 может быть сконфигурирована, чтобы уменьшаться, когда расстояние от конечной точки E2 до точки остановки увеличивается.
[0054] Таким же образом, в настоящем варианте осуществления, при задании целевой скорости транспортного средства в конечной точке E2 следующего участка L2, если участок L3 содержит точку замедления, замедление выполняется так, что скорость транспортного средства становится предварительно определенной скоростью транспортного средства в конечной точке E2 участка L2. Однако, степень замедления может быть изменена согласно позиции этой точки замедления на участке L3. Например, степень замедления может быть уменьшена так, что скорость транспортного средства будет больше этой предварительно определенной скорости транспортного средства в конечной точке E2 участка L2, если эта точка замедления находится на расстоянии от конечной точки E2, большем или равном предварительно определенному расстоянию, которое задано заранее. Дополнительно, степень замедления до конечной точки E2 участка L2 может быть уменьшена, когда расстояние от конечной точки E2 до точки замедления увеличивается.
[0055] Как описано выше, в ECU 12 формирования целевого маршрута (устройстве формирования целевого маршрута), блок 30 задания скорости транспортного средства в конечной точке (блок настройки) может задавать целевую скорость транспортного средства заранее на основе расстояния от конечной точки участка (например, конечной точки E1 участка L1 или конечной точки E2 участка L2) (конечной точки участка) до точки остановки или точки замедления транспортного средства на предварительно определенном участке (например, участке L2 или участке L3). Соответственно, представляется возможным надлежащим образом задавать целевую скорость транспортного средства в конечной точке участка для участка, на котором транспортное средство в настоящий момент движется, согласно расстоянию от конечной точки участка до точки остановки или точки замедления транспортного средства на предварительно определенном участке.
[0056] (2-4) Модифицированный пример 4
Как описано с помощью фиг. 4, при определении, что вычисление и обновление целевого маршрута не были завершены в течение предварительно определенного времени (Нет на этапе S16), ECU 14 управления приведением в движение управляет приведением в движение транспортного средства на основе целевой скорости Vp транспортного средства в конечной точке текущего участка (этап S20). В это время, при определении, что вычисление и обновление целевого маршрута не были завершены в течение предварительно определенного времени (Нет на этапе S16), вычисление целевого маршрута посредством блока 32 вычисления целевого маршрута может быть прекращено, или вычисление целевого маршрута посредством блока 32 вычисления целевого маршрута может быть продолжено. Если вычисление целевого маршрута посредством блока 32 вычисления целевого маршрута продолжается, и время, остающееся до завершения вычисления и обновления, может быть получено, ECU 14 управления приведением в движение может изменять степень замедления до конечной точки участка согласно этому оставшемуся времени. Например, если оставшееся время короче предварительно определенного времени (например, одной секунды), приведение в движение транспортного средства может управляться с меньшей степенью замедления, чем степень замедления при остановке транспортного средства, даже если целевая скорость Vp транспортного средства в конечной точке текущего участка равна 0 (остановка). Т.е., если оставшееся время короче предварительно определенного времени, приведение в движение транспортного средства может управляться с меньшей степенью замедления, чем степень замедления при замедлении транспортного средства до целевой скорости Vp транспортного средства в конечной точке текущего участка.
[0057] Как описано выше, ECU 14 управления приведением в движение (устройство управления) может управлять приведением в движение транспортного средства, изменяя целевую скорость транспортного средства до меньшей степени замедления, чем степень замедления при замедлении до целевой скорости транспортного средства, даже если блок 32 вычисления целевого маршрута (блок формирования) не может сформировать целевой маршрут в точке обновления маршрута (предварительно определенный момент времени) (Нет на этапе S16 на фиг. 4), если блок 32 вычисления целевого маршрута (блок формирования) может сформировать целевой маршрут в течение предварительно определенного времени (предварительно определенное время). Соответственно, если целевой маршрут может быть сформирован в течение предварительно определенного времени, приведение в движение транспортного средства может управляться посредством изменения целевой скорости транспортного средства так, чтобы уменьшать дискомфорт, который чувствуется пользователем при обновлении целевого маршрута.
[0058] (2-5) Модифицированный пример 5
Как описано с помощью фиг. 4, в настоящем варианте осуществления, блок 30 задания скорости транспортного средства в конечной точке задает целевую скорость транспортного средства в конечной точке E2 следующего участка L2 (этап S12). Целевая скорость транспортного средства, которая задается посредством блока 30 задания скорости транспортного средства в конечной точке, может быть задана как значение скорости транспортного средства в конечной точке E2 участка L2 или быть задана как функция времени для скорости транспортного средства (профиль скорости транспортного средства) вплоть до конечной точки E2 участка L2. Если целевая скорость транспортного средства задается как профиль скорости транспортного средства, блок 30 задания скорости транспортного средства в конечной точке формирует профиль скорости транспортного средства (например, любой профиль из профилей Pa, Pb и Pc скорости транспортного средства, иллюстрированных на фиг. 5) на этапе S12. ECU 14 управления приведением в движение управляет приведением в движение транспортного средства на основе сформированного профиля скорости транспортного средства на этапе S20.
[0059] Дополнительно, в случае, когда целевая скорость транспортного средства задается как значение скорости транспортного средства в конечной точке E2 участка L2, блок 30 задания скорости транспортного средства в конечной точке может формировать профиль скорости транспортного средства (например, любой профиль из профилей Pa, Pb и Pc скорости транспортного средства, иллюстрированных на фиг. 5) на основе этого значения скорости транспортного средства, при определении, что вычисление и обновление целевого маршрута не были завершены в течение предварительно определенного времени (Нет на этапе S16). ECU 14 управления приведением в движение управляет приведением в движение транспортного средства на основе сформированного профиля скорости транспортного средства на этапе S20, иллюстрированном на фиг. 4.
[0060] Кроме того, в случае, когда целевая скорость транспортного средства задается как значение скорости транспортного средства в конечной точке E2 участка L2, блок 32 вычисления целевого маршрута может вычислять целевой маршрут на основе этого значения скорости транспортного средства, при вычислении целевого маршрута от точки C1 обновления маршрута на участке L1 до конечной точки E2 участка L2 на этапе S14. В этом случае, если вычисление и обновление целевого маршрута от точки C2 обновления маршрута участка L2 до конечной точки участка L3 не завершены на участке L2, управление приведением в движение транспортного средства продолжается на основе целевого маршрута, который используется в настоящий момент. Т.е., управление приведением в движение от точки C2 обновления маршрута участка L2 до конечной точки E2 выполняется на основе целевого маршрута, который используется в настоящий момент, так что скорость транспортного средства в конечной точке E2 становится заданным значением скорости транспортного средства, и скорость транспортного средства в конечной точке E2 поддерживается после этого. Конечно, если вычисление и обновление целевого маршрута от точки C2 обновления маршрута участка L2 до конечной точки участка L3 завершаются на участке L2, целевой маршрут, который в настоящее время используется, обновляется вновь вычисленным целевым маршрутом.
[0061] В вариантах осуществления, описанных выше, автономное управление приведением в движение выполняется посредством ECU 14 управления приведением в движение; однако, формирование целевого маршрута из настоящей заявки может быть использовано, даже если полностью автономное управление приведением в движение не выполняется, или даже когда автономное управление приведением в движение не выполняется вообще. Например, целевой маршрут, сформированный посредством ECU 12 формирования целевого маршрута, может быть просто сообщен водителю, или условия приведения в движение для осуществления сформированного целевого маршрута могут быть сообщены пользователю. В этих случаях поддержка вождения для поддержки вождения для пользователя (водителя) будет выполняться вместо автономного управления приведением в движение. Кроме того, даже если полностью автономное управление приведением в движение не выполняется, помощь при вождении может быть выполнена, такая как выполнение только ускорения/замедления или только рулевое управление посредством устройства 10 управления приведением в движение.
Описания ссылочных символов
[0062] 10 Устройство управления приведением в движение
12 ECU формирования целевого маршрута
14 ECU управления приведением в движение
28 Блок определения момента обновления маршрута
30 Блок задания скорости транспортного средства в конечной точке
32 Блок вычисления целевого маршрута
Группа изобретений относится к устройству формирования целевого маршрута для управления приведением в движение транспортного средства, которое работает следующим образом. Блок формирования формирует целевой маршрут в предварительно определенный момент времени для управления приведением в движение транспортного средства на предварительно определенном участке. Блок настройки задает заранее целевую скорость транспортного средства заранее в конечной точке участка для участка, на котором транспортное средство в настоящий момент движется. Целевая скорость используется, когда блок формирования не может сформировать целевой маршрут в предварительно определенный момент времени, при этом блок настройки задает целевую скорость транспортного средства на основе дорожной информации на предварительно определенном участке. Обеспечивается обновление маршрута перед конечной точкой участка и выполняется обновление на новый целевой маршрут в точке обновления маршрута, вследствие чего уменьшается дискомфорт, который чувствуется пользователем при обновлении целевого маршрута. 2 н. и 10 з.п. ф-лы, 5 ил.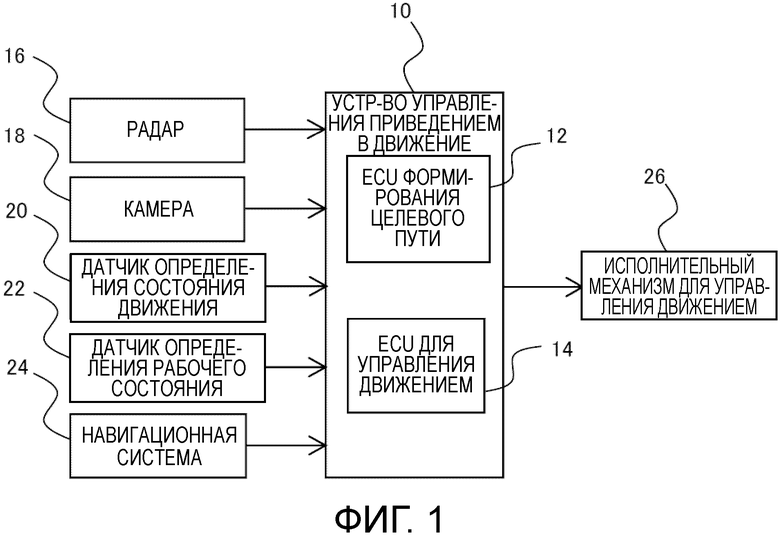
1. Устройство формирования целевого маршрута, содержащее:
блок формирования, который формирует целевой маршрут в предварительно определенный момент времени для управления приведением в движение транспортного средства на предварительно определенном участке; и
блок настройки, который задает целевую скорость транспортного средства заранее в конечной точке участка для участка, на котором транспортное средство в настоящий момент движется, которая является целевой скоростью транспортного средства, которая используется, когда блок формирования не может сформировать целевой маршрут в предварительно определенный момент времени,
при этом
блок настройки задает целевую скорость транспортного средства на основе дорожной информации на предварительно определенном участке.
2. Устройство формирования целевого маршрута по п. 1, дополнительно содержащее:
блок определения, который определяет момент времени, в который транспортное средство достигает предварительно определенной позиции, в качестве предварительно определенного момента времени на основе информации о местоположении транспортного средства.
3. Устройство формирования целевого маршрута по п. 1 или 2, при этом
предварительно определенный участок включает в себя следующий участок для участка, на котором транспортное средство в настоящий момент движется; и
блок формирования формирует целевой маршрут для предварительно определенного участка, когда транспортное средство достигает предварительно определенной позиции участка, на котором транспортное средство в настоящий момент движется.
4. Устройство формирования целевого маршрута по п. 1 или 2, в котором
блок настройки задает целевую скорость транспортного средства, пока транспортное средство движется на участке перед участком, на котором транспортное средство движется в настоящий момент.
5. Устройство формирования целевого маршрута по п. 1 или 2, в котором
блок настройки задает целевую скорость транспортного средства заранее на основе точки остановки или точки замедления транспортного средства на предварительно определенном участке в дорожной информации.
6. Устройство формирования целевого маршрута по п. 5, в котором
блок настройки задает целевую скорость транспортного средства заранее на основе расстояния от конечной точки участка до точки остановки или точки замедления транспортного средства на предварительно определенном участке.
7. Устройство управления приведением в движение, содержащее:
устройство формирования целевого маршрута по любому из пп. 1-6; и
устройство управления, которое управляет приведением в движение транспортного средства на основе целевого маршрута, сформированного посредством устройства формирования целевой скорости транспортного средства.
8. Устройство управления приведением в движение по п. 7, при этом
устройство управления управляет приведением в движение транспортного средства на основе целевой скорости транспортного средства в случае, в котором блок формирования не может сформировать целевой маршрут в предварительно определенный момент времени.
9. Устройство управления приведением в движение по п. 7 или 8, при этом
устройство управления управляет приведением в движение транспортного средства на основе целевой скорости транспортного средства, по меньшей мере, до конечной точки участка.
10. Устройство управления приведением в движение по п. 7 или 8, при этом
устройство управления управляет приведением в движение транспортного средства на основе целевой скорости транспортного средства, по меньшей мере, в фрагменте предварительно определенного участка.
11. Устройство управления приведением в движение по п. 7 или 8, при этом
устройство управления управляет приведением в движение транспортного средства на основе целевой скорости транспортного средства в случае, в котором блок формирования не может сформировать целевой маршрут в предварительно определенный момент времени в течение предварительно определенного времени.
12. Устройство управления приведением в движение по п. 7 или 8, при этом
устройство управления управляет приведением в движение транспортного средства посредством изменения целевой скорости транспортного средства в случае, в котором блок формирования может формировать целевой маршрут в течение предварительно определенного времени, даже если блок формирования не может сформировать целевой маршрут в предварительно определенное время.
| СИСТЕМА И СПОСОБ ОПТИМИЗАЦИИ РЕЙСА ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2007 |
|
RU2481988C2 |
| US 20140207357 A1, 24.07.2014 | |||
| JP 2011240816 A, 01.12.2011. | |||

