Область техники, которой относится изобретение
Изобретение относится к авиационной технике и может быть использовано в любом виде техники, где применяются управляемые аэродинамические поверхности, в частности к вертолетостроению, а именно к конструктивным элементам винтокрылых летательных аппаратов.
Уровень техники
Известна конструкция 2-лопастного несущего винта, в котором лопасти установлены на осевых шарнирах на общей втулке, которая имеет горизонтальный узел качания на валу несущего винта (выходном валу редуктора). Наличие общего узла качания позволяет снизить переменные нагрузки, приходящие от лопастей к местам их крепления (к втулке НВ), в сравнении с жестким креплением лопастей. При этом, в сравнении с отдельными горизонтальными шарнирами лопастей, общий центральный узел качания не нагружается центробежными силами от них, которые взаимно уравновешивают друг друга. Это позволяет конструировать втулку несущего винта меньшей массы и размеров.
Однако во многих случаях для реализации требуемой силы тяги на винте вертолетного аппарата без значительного увеличения диаметра несущего винта двух лопастей недостаточно. Кроме того, 2-лопастные несущие винты передают на фюзеляж большие динамические нагрузки (больше уровень вибронагрузок).
Решения этих проблем достигают увеличением количества лопастей несущего винта. При этом, в креплении лопастей таких несущих винтов имеются горизонтальные и вертикальные шарниры, предназначенные также для снижения переменных нагрузок, приходящих от лопастей ко втулке несущего винта.
Каждый шарнир лопасти указанного несущего винта нагружается центробежной силой от лопасти, значительно превосходящей силу тяги, что приводит к быстрому износу таких шарниров.
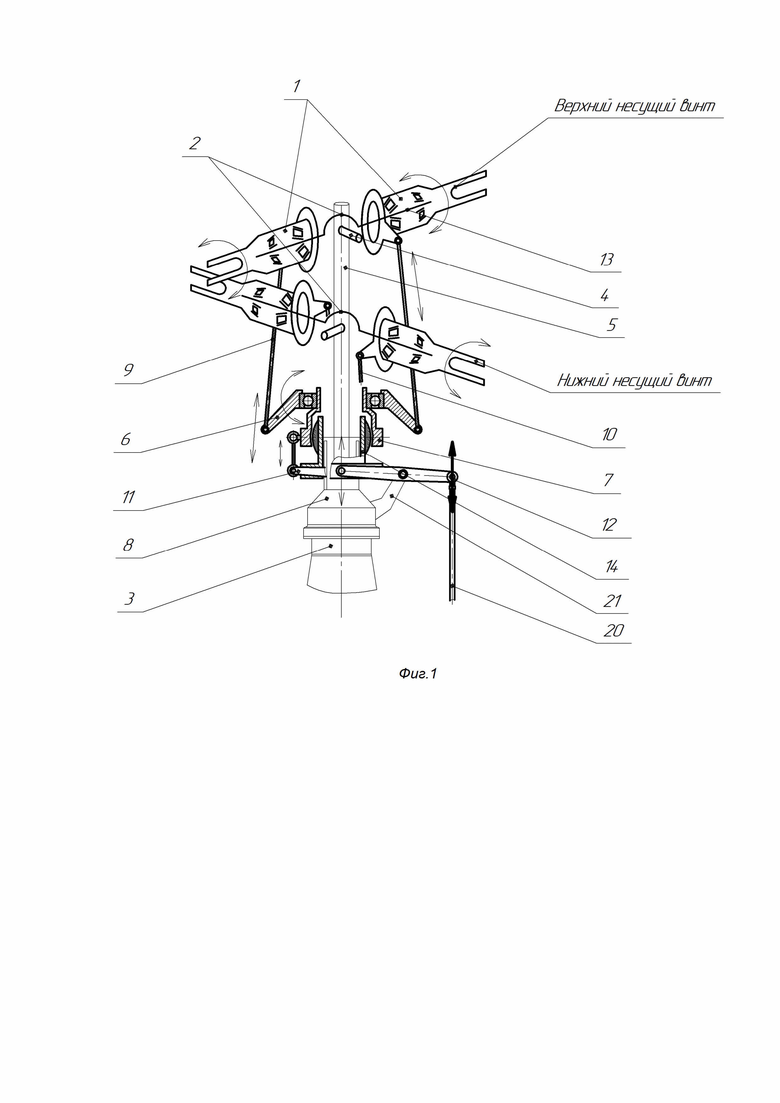
Для решения указанной проблемы предлагается конструкция несущей системы вертолета (фиг. 1), в несущем винте которой взаимопротивоположные лопасти устанавливаются на общем корпусе втулки, имеющем горизонтальную ось качания на валу НВ (общий шарнирный узел качания). При этом каждый такой корпус втулки с двумя лопастями, имеющий также осевые шарниры лопастей, ставится один над другим на общем валу несущего винта редуктора.
К недостаткам такого несущего винта можно отнести большие габаритные размеры по вертикали (вдоль оси вала НВ), а, следовательно, и большее, в сравнении с традиционным несущим винтом, аэродинамическое сопротивление в полете.
Указанная конструкция крепления лопастей применяется в хвостовых винтах вертолета (Ми-171, Ми-28, Ми-38, Apache AH-64), система управления которыми позволяет изменять только общий шаг лопастей. В.В. Тополев, «Конструкция и эксплуатация вертолета МИ-171, НП «Центр подготовки персонала», г. Тюмень, 2008г., стр. 62-64, http://78.29.20.90/dw/lib/exe/fetch.php/ps:dikihvf:discip:mi-171_bortmexaniki_.pdf,
В отличии от представленных аналогов в заявленной конструкции несущей системы винтокрылого летательного аппарата система управления обеспечивает изменение и общего и циклического шагов.
Сущность изобретения
Задачей, решаемой заявленным изобретением, является создание несущей системы винтокрылого летательного аппарата с взаимной компенсацией центробежных сил противоположно установленных лопастей и, соответственно, сниженной нагруженностью общего шарнирного узла качания. В сравнении с отдельными горизонтальными шарнирами лопастей заявленная конструкция несущего винта позволяет снизить вредное влияние воздушных потоков от лопастей друг на друга, так как каждая последующая лопасть движется в своей плоскости вращения.
Технический результат заявленного изобретения заключается в снижении вредного влияния воздушных потоков от лопастей друг на друга, а также в снижении нагруженности общего шарнирного узла качания и в снижение переменных нагрузок, приходящих от лопастей ко втулке несущего винта.
Заявленный технический результат достигается за счет того, что несущая система винтокрылого летательного аппарата, содержащая редуктор с выходным валом, направляющую трубу, установленную на редукторе, ползун, установленный с возможностью вертикального перемещения по направляющей трубе, шарнирно установленный на ползуне автомат перекоса с внутренним и наружным кольцами, несущий винт, выполненный в виде двух разнесенных по вертикальной оси спаренных двухлопастных несущих винтов, установленных через узел качания с поперечной осью качания на одном выходном валу редуктора под разным углом друг к другу, при этом каждый из двух спаренных винтов содержит корпус втулки, к которому жестко прикреплены оси рукавов лопастей, причем на каждой оси на радиально-упорных конических подшипниках установлены рукава лопастей, на концах которых закреплены лопасти, причем несущая система содержит рычажно-шарнирную систему управления, выполненную с возможностью управления силой тяги несущего винта по величине и по направлению посредством рычага общего шага, и рычагов поперечного и продольного управления, причем рычаг общего шага установлен на кронштейне направляющей трубы и выполнен с возможностью передачи вертикального перемещения от соответствующей тяги управления летательного аппарата к ползуну, на котором также установлены поворотные рычаги поперечного и продольного управления, выполненные с возможностью перемещения вертикально вместе с ползуном при изменении общего шага, при этом поворотные рычаги соединены с внутренним кольцом автомата перекоса, при этом к наружному кольцу автомата перекоса прикреплены по периметру тяги управления лопастями несущих винтов, при чем каждая тяга шарнирно соединена с поводком соответствующего рукава лопасти.
В частном случае реализации заявленного технического решения узел качания каждого винта состоит из игольчатого радиального и шарикового радиально-упорного подшипников, установленных в корпусе втулки по наружному диаметру, и на осях цапфы по внутреннему диаметру, при этом цапфа каждого несущего винта соединена шлицевым соединением с выходным валом главного редуктора.
В частном случае реализации заявленного технического решения внутреннее кольцо автомата перекоса соединено посредством шлиц-шарнира с корпусом редуктора.
В частном случае реализации заявленного технического решения наружное кольцо автомата перекоса установлено на внутреннем кольце автомата перекоса посредством радиально-упорного подшипника.
В частном случае реализации заявленного технического решения наружное кольцо автомата перекоса выполнено с возможностью вращения вместе с несущим винтом, для чего соединено с несущим винтом шлиц-шарнирами.
В частном случае реализации заявленного технического решения поводки являются крышками подшипникового узла рукава лопасти.
Краткое описание чертежей
Детали, признаки, а также преимущества настоящего изобретения следуют из нижеследующего описания вариантов реализации заявленного технического решения с использованием чертежей, на которых показано:
на фиг. 1 - показана кинематическая схема данной несущей системы,
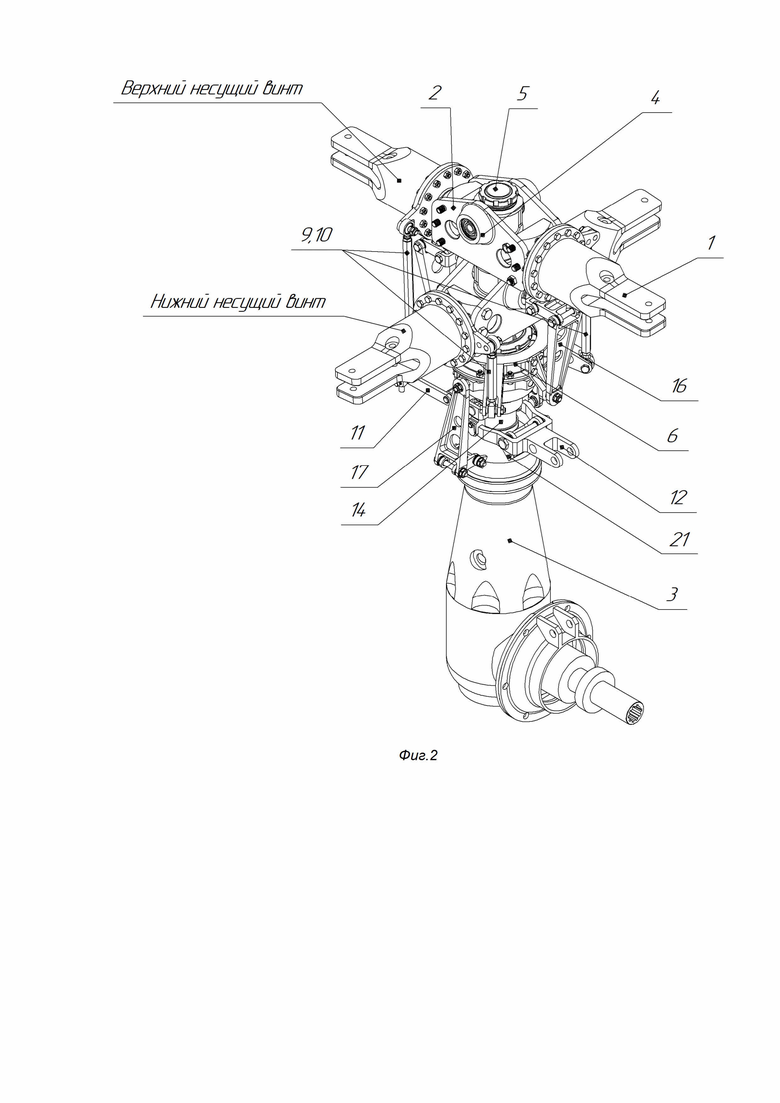
на фиг. 2 - общий вид,
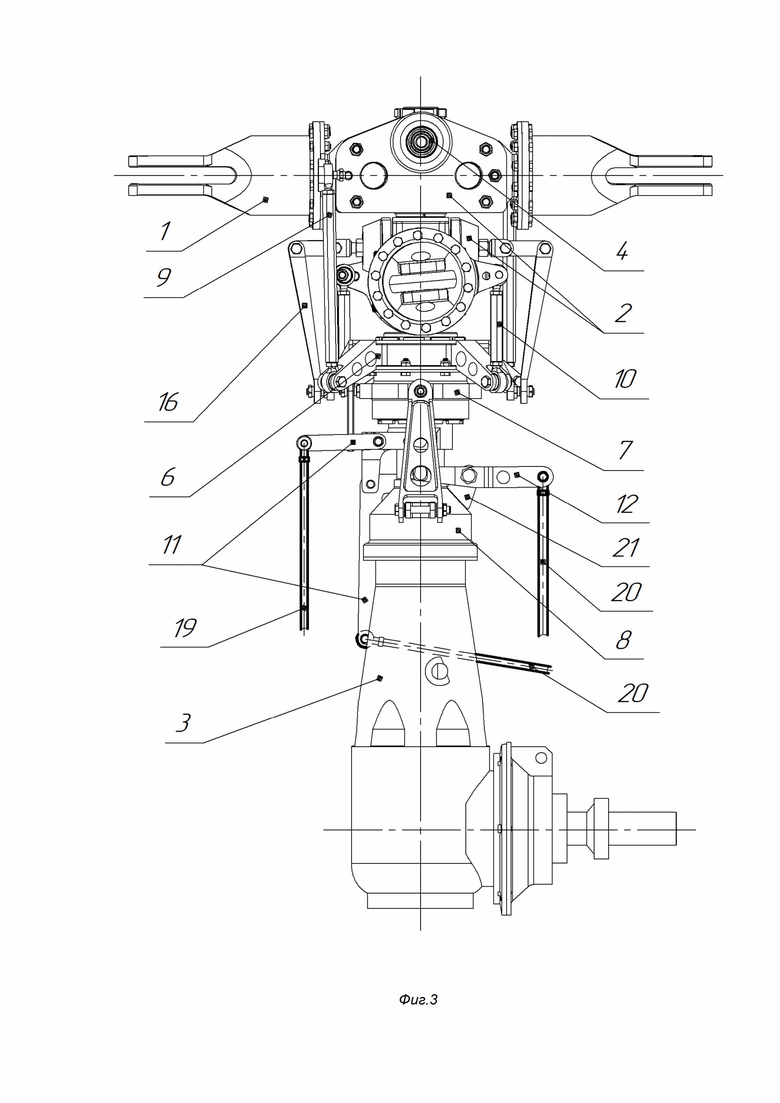
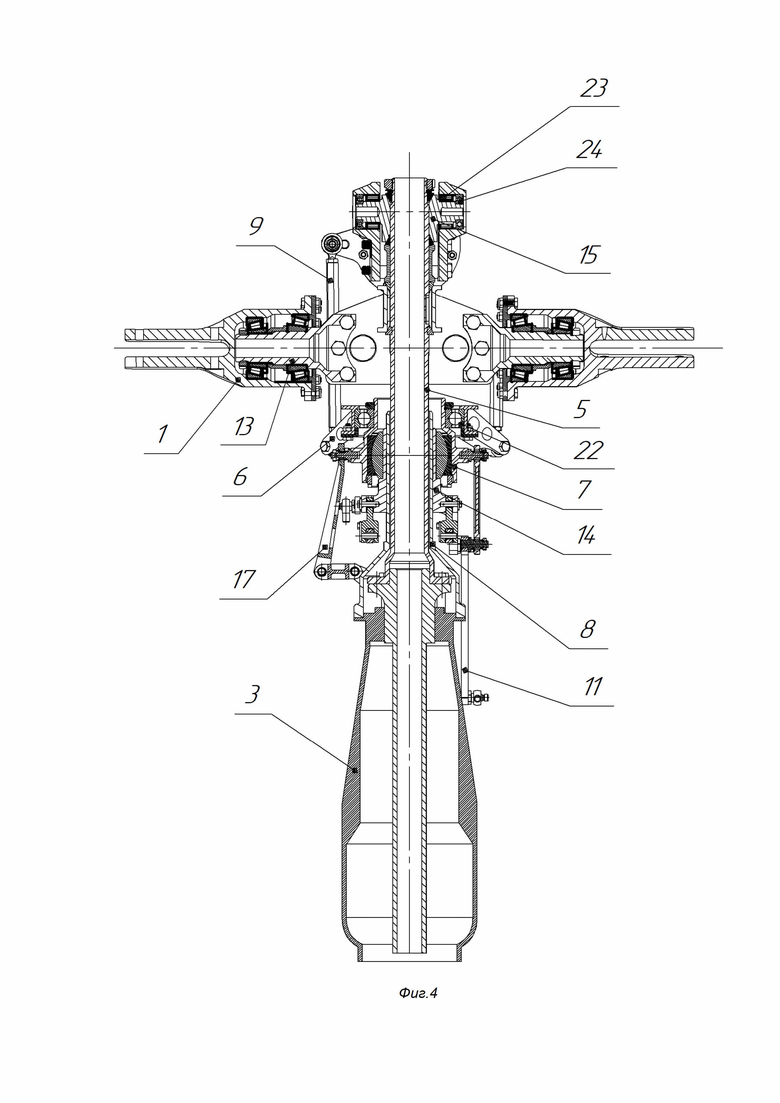
на фиг. 3 и 4 - главный вид конструкции и разрез.
На фигурах цифрами обозначены следующие позиции:
1 - рукава лопастей; 2 - корпус втулки несущего винта; 3 - главный редуктор; 4 - узел качания несущего винта; 5 - выходной вал главного редуктора; 6 - наружное кольцо автомата перекоса; 7 - внутреннее кольцо автомата перекоса; 8 - направляющий стакан автомата перекоса, 9 - тяги лопасти верхнего несущего винта; 10 - тяга лопасти нижнего несущего винта; 11 - рычаг циклического шага; 12 -рычаг общего шага, 13 - ось рукава лопасти; 14 - ползун; 15 - цапфа; 16, 17 - шлиц-шарниры; 18 - тяга продольного управления; 19 - тяга поперечного управления; 20 - тяга общего шага; 21 - кронштейн общего шага, 22 - радиально-упорный подшипник автомата перекоса; 23 - радиальный игольчатый подшипник узла качания; 24 - шариковый радиально-упорный подшипник узла качания;
Раскрытие изобретения
Разработанная несущая система (фиг. 1, фиг. 2) состоит из несущего винта и системы управления им.
Несущий винт представляет собой два спаренных, установленных на одном выходном валу (5) редуктора (3) 2-лопастных винта, каждый из которых имеет поперечную ось качания (4). Узел качания (4) каждого винта состоит из игольчатого радиального (23) и шарикового радиально-упорного подшипников (24), которые установлены в корпусе втулки (2) по наружному диаметру, и на осях цапфы (15) по внутреннему диаметру.
Каждый из качающихся винтов содержит корпус втулки (2), к которому жестко прикреплены оси рукавов (13) лопастей. На каждой оси на радиально-упорных конических подшипниках установлены рукава (1) лопастей, на концах которых закреплены сами лопасти. Таким образом создается осевой шарнир каждой лопасти.
Лопасти верхнего несущего винта приводятся во вращение от двух тяг (9). Лопасти нижнего несущего винта приводятся во вращение от двух тяг (10). Упомянутые тяги (9 и 10) крепятся к поводкам рукавов. Поводки также являются крышками подшипникового узла рукава лопасти. Также упомянутые тяги соединены с наружным (6) кольцом автомата перекоса.
Цапфа (15) каждого несущего винта (верхнего и нижнего) имеет шлицевое соединение с выходным валом (5) главного редуктора (3), что позволяет устанавливать верхние и нижние несущие винты на выходном валу под разным углом друг к другу, для достижения оптимальных аэродинамических характеристик несущего винта.
Система управления несущим винтом - рычажно-шарнирная, предназначена для передачи перемещений от органов управления вертолета к лопастям несущих винтов.
Система управления имеет три канала управления несущим винтом (лопастями) - канал общего шага, канал поперечного и продольного управления (каналы циклического шага). Таким образом можно управлять силой тяги несущего винта по величине и по направлению.
Рычаг общего шага (12) установлен на верхней части корпуса редуктора(3) на кронштейне (21) направляющего стакана (8) и передает вертикальное перемещение от соответствующей тяги (20) управления вертолетного аппарата к ползуну (14), вертикально двигающемуся по направляющему стакану (8), смонтированному на редукторе (3).
На ползуне (14) установлено два поворотных рычага (11) поперечного и продольного управления, которые перемещаются вертикально вместе с ползуном (14) при изменении общего шага, что устраняет перекрестные связи в управлении.
Каждый из рычагов (11) соединен с внутренним кольцом (7) автомата перекоса, шарнирно установленном на ползуне (14).
Поворот рычагов (11) продольного и поперечного управления создает наклон внутреннего (7) кольца автомата перекоса в продольной и поперечной вертикальных плоскостях. Для предотвращения вращения внутреннего (7) кольца автомата перекоса в горизонтальной плоскости оно соединено через шлиц-шарнир (17) с корпусом редуктора.
На внутреннем (7) кольце автомата перекоса на радиально-упорном подшипнике (22) установлено наружное кольцо автомата перекоса (6), к которому по периметру крепятся тяги управления (9 и 10) лопастями верхнего и нижнего несущих винтов соответственно. Каждая тяга (9 и 10) шарнирно соединена с поводком соответствующего рукава лопасти. Наружное (6) кольцо автомата перекоса вращается вместе с несущим винтом, для чего соединено с ним шлиц-шарнирами (16).
Таким образом, управление всеми лопастями осуществляется от единого автомата перекоса, где все вертикальные тяги соединены с поводками и имеют разные длины.
От органов управления вертолета через тяги (18), (19), (20) движение передается на рычаги системы управления несущим винтом - общего шага (12), продольного и поперечного управления (11). При неизменном положении тяг (18) и (19) и рычагов продольного и поперечного управления (11), поворот рычага общего шага (12) приводит к вертикальному перемещению ползуна, а вместе с ним и внутреннего кольца автомата перекоса (7). При этом наклона внутреннего кольца автомата перекоса не происходит, так как рычаги продольного и поперечного управления перемещаются вертикально вместе с ползуном.
Вместе с внутренним (7) кольцом автомата перекоса происходит вертикальное перемещение наружного (6) кольца автомата перекоса, которое вращается относительно внутреннего (7). Вертикальное перемещение наружного (6) кольца автомата перекоса приводит к одновременному перемещению всех четырех крепящихся к нему тяг (9, 10), которые через поводки поворачивают на равные углы рукава лопастей (1), тем самым изменяя общий шаг каждого несущего винта. Происходит управление силой тяги несущего винта.
При неизменном положении тяги (20) и рычага общего шага (12), перемещение тяг продольного (18) и поперечного (19) управления приводит к повороту соответствующих рычагов (11), установленных на ползуне (который в данном случае неподвижен).
Поворот данных рычагов (11) продольного и поперечного управления приведет к наклону внутреннего (7) кольца автомата перекоса. Вместе с наклоном внутреннего кольца произойдет наклон вращающегося вместе с несущим винтом наружного кольца автомата перекоса (поз. 6). Крепящиеся к нему тяги (9,10) будут совершать вертикальное периодическое перемещение вверх-вниз за оборот винта. Таким образом каждый рукав будет поворачивать лопасть (изменять угол ее установки) по гармоническому закону за оборот винта, то есть будет происходить изменение циклического шага каждого винта. Происходит управление направлением силы тяги несущего винта.
Поворот несущих двухлопастных винтов относительно поперечной оси (узла качания) при этом не происходит из-за действия на него значительных центробежных сил со стороны лопастей, которые выравнивают винт в вертикальной плоскости.
| название | год | авторы | номер документа |
|---|---|---|---|
| Соосный несущий винт винтокрылого летательного аппарата | 2021 |
|
RU2756861C1 |
| СПОСОБ УПРАВЛЕНИЯ НЕСУЩИМ ВИНТОМ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2000 |
|
RU2203835C2 |
| СИСТЕМА УПРАВЛЕНИЯ СООСНЫМ ВЕРТОЛЕТОМ | 2015 |
|
RU2613136C1 |
| ВТУЛКА ВОЗДУШНОГО ВИНТА С АВТОМАТОМ ПЕРЕКОСА | 2018 |
|
RU2746024C2 |
| АВТОМАТ ПЕРЕКОСА ВЕРТОЛЕТА | 2019 |
|
RU2728945C1 |
| СПОСОБ УПРАВЛЕНИЯ НЕСУЩИМ ВИНТОМ ВИНТОКРЫЛОГО ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2371351C2 |
| СООСНАЯ НЕСУЩАЯ СИСТЕМА | 2016 |
|
RU2641552C1 |
| СООСНАЯ НЕСУЩАЯ СИСТЕМА | 2005 |
|
RU2307766C1 |
| АВТОМАТ ПЕРЕКОСА | 2009 |
|
RU2402457C1 |
| МЕХАНИЗМ ПАРИРОВАНИЯ КРУТЯЩЕГО МОМЕНТА ТАРЕЛКИ АВТОМАТА ПЕРЕКОСА | 2006 |
|
RU2397113C2 |
Изобретение относится к области авиации, в частности к конструкциям несущих винтов летательных аппаратов. Несущая система винтокрылого летательного аппарата содержит редуктор с выходным валом, направляющую трубу, установленную на редукторе, ползун, установленный с возможностью вертикального перемещения по направляющей трубе, шарнирно установленный на ползуне автомат перекоса с внутренним и наружным кольцами. Несущий винт выполнен в виде двух разнесенных по вертикальной оси спаренных двухлопастных несущих винтов, установленных через узел качания с поперечной осью качания на одном выходном валу редуктора под разными углами друг к другу. Каждый винт содержит корпус втулки, к которому жестко прикреплены оси рукавов лопастей, причем на каждой оси на радиально-упорных конических подшипниках установлены рукава лопастей, на концах которых закреплены лопасти. Несущая система содержит рычажно-шарнирную систему управления, выполненную с возможностью управления силой тяги несущего винта по величине и по направлению посредством рычага общего шага и рычагов поперечного и продольного управления. Обеспечивается снижение влияния воздушных потоков от лопастей друг на друга, а также нагруженности общего шарнирного узла качания. 5 з.п. ф-лы, 4 ил. 
1. Несущая система винтокрылого летательного аппарата, содержащая
редуктор с выходным валом, направляющую трубу, установленную на редукторе, ползун, установленный с возможностью вертикального перемещения по направляющей трубе, шарнирно установленный на ползуне автомат перекоса с внутренним и наружным кольцами,
несущий винт, выполненный в виде двух разнесенных по вертикальной оси спаренных двухлопастных несущих винтов, установленных через узел качания с поперечной осью качания на одном выходном валу редуктора под разными углами друг к другу,
при этом каждый из двух спаренных винтов содержит корпус втулки, к которому жестко прикреплены оси рукавов лопастей, причем на каждой оси на радиально-упорных конических подшипниках установлены рукава лопастей, на концах которых закреплены лопасти,
отличающаяся тем, что
несущая система содержит рычажно-шарнирную систему управления, выполненную с возможностью управления силой тяги несущего винта по величине и по направлению посредством рычага общего шага и рычагов поперечного и продольного управления,
причем рычаг общего шага установлен на кронштейне направляющей трубы и выполнен с возможностью передачи вертикального перемещения от соответствующей тяги управления летательного аппарата к ползуну, на котором также установлены поворотные рычаги поперечного и продольного управления, выполненные с возможностью перемещения вертикально вместе с ползуном при изменении общего шага, при этом поворотные рычаги соединены с внутренним кольцом автомата перекоса,
при этом к наружному кольцу автомата перекоса прикреплены по периметру тяги управления лопастями несущих винтов, причем каждая тяга шарнирно соединена с поводком соответствующего рукава лопасти.
2. Система по п.1, отличающаяся тем, что узел качания каждого винта состоит из игольчатого радиального и шарикового радиально-упорного подшипников, установленных в корпусе втулки по наружному диаметру и на осях цапфы по внутреннему диаметру, при этом цапфа каждого несущего винта соединена шлицевым соединением с выходным валом главного редуктора.
3. Система по п.1, отличающаяся тем, что внутреннее кольцо автомата перекоса соединено посредством шлиц-шарнира с корпусом редуктора.
4. Система по п.1, отличающаяся тем, что наружное кольцо автомата перекоса установлено на внутреннем кольце автомата перекоса посредством радиально-упорного подшипника.
5. Система по п.1, отличающаяся тем, что наружное кольцо автомата перекоса выполнено с возможностью вращения вместе с несущим винтом, для чего соединено с несущим винтом шлиц-шарнирами.
6. Система по п.1, отличающаяся тем, что поводки являются крышками подшипникового узла рукава лопасти.
| НАРОДНЫЙ ВЕРТОЛЕТ 21 ВЕКА КАН 21 (ВАРИАНТЫ) | 2007 |
|
RU2364550C2 |
| EP 1572534 B1, 13.09.2006 | |||
| CN 107264796 A, 20.10.2017 | |||
| СПОСОБ РАБОТЫ ОТОПИТЕЛЬНОГО КОТЛА В СИСТЕМЕ ОТОПЛЕНИЯ | 2022 |
|
RU2818407C2 |

