Изобретение относится к судостроению - системам управления техническими средствами и управления движением морского автономного и дистанционно управляемого надводного судна (МАНС).
Одним из условий реализации управления МАНС категории «RCMC» (в обозначениях Положения по классификации морских автономных и дистанционно управляемых надводных судов, НД № 2-030101-037, Российской морской регистр судоходства) в дистанционном режиме управления из берегового ЦДУ с возможностью перехода на ручное при движении в море является разработка автоматизированных систем управления техническими средствами судна, обеспечивающих гарантированное доведение команд от ЦДУ до средств управления движением и маневрированием, технических средств судна и общесудовых систем, постоянный контроль исполнения команд от ЦДУ на предмет не превышения допустимых отклонений и своевременное информирование экипажа судна о необходимости перехода на ручное управление.
Из уровня техники известна система координированного управления движением судна в режимах автоматического и дистанционного управления по патенту RU 2741669 (МПК В63Н 25/04, G05D 1/00, G08G 3/00, G05B 13/04, опубл. 28.01.2021), которая содержит блок измерителей параметров движения судна, блок объектов управления, блок адаптации управления и стабилизации на малых ходах, блок управления и стабилизации на малых ходах, блок адаптации управления и стабилизации на скорости хода более четырёх узлов, блок управления и стабилизации на скорости хода более четырёх узлов, блок обработки навигационной информации, блок моделирования движения судна на малых ходах, блок моделирования движения судна на скорости хода более четырёх узлов, блок контроля и управления, обзорно-поисковая система и взаимосвязанные автономная навигационная система и береговой пост. Система координированного управления движением судна обеспечивает управление судном как в автоматическом, так и дистанционном режимах, с использованием в качестве входных данных результатов моделирования движения судна в режиме реального времени и реализацией алгоритмов раздельно для малых скоростей и для скоростей свыше 4 узлов.
Техническое решение, известное из патента RU 2741669, выбрано в качестве ближайшего аналога данной полезной модели.
В качестве недостатков ближайшего аналога можно отметить отсутствие реализации необходимого для МАНС категории RCMС-MCDS режима дистанционного управления МАНС с экипажем на борту, проявляющееся в отсутствии своевременного информирования экипажа судна о необходимости перехода на ручное управление в результате постоянного контроля исполнения команд от ЦДУ на предмет не превышения допустимых отклонений. Другим недостатком аналога является отсутствие его связи с общесудовыми системами, такими как система водоотливная и осушительная, система контроля аварийных масс воды в отсеках, система перетока (креновая), система сжатого воздуха и других ОСС.
Задача, на решение которой направлено данное изобретение, заключается в создании системы управления техническими средствами и движением МАНС, обеспечивающей дистанционное управление судном из берегового ЦДУ с возможностью перехода на ручное управление при движении в море и ручное управление с поддержкой принятия решения в соответствии с категорией RCMС-MCDS по НД №2-030101-037, а также в повышении эффективности процесса управления МАНС этой категории путём устранения указанных недостатков.
Технический результат заключается в реализации системы управления техническими средствами и движением МАНС, обеспечивающей дистанционное управление судном из берегового ЦДУ с возможностью перехода на ручное управление при движении в море и ручное управление с поддержкой принятия решения, в том числе управление техническими средствами судна, включая ОСС, и их контроль из ЦДУ и с местных постов.
Сущность заявляемой системы управления техническими средствами и движением МАНС поясняется примером её реализации и фиг. 1, где изображена структурная схема системы.
Система управления техническими средствами и движением МАНС состоит из следующих систем: система управления техническими средствами (СУ ТС) 1, система удаленного доступа (СУ) 2, система автоматизированного управления движением (САУД) 3.
СУ ТС предназначена для управления техническими средствами с местных постов управления, судового поста дистанционного управления или ЦДУ.
Структурно система представляет собой канал передачи данных кольцевой топологии. Кольцо состоит из основного и резервного приборов «Станция локальная технологическая» (СЛТ) 6, комплекта станции операторской 4 и комплекта аппаратуры для встройки 8, включающего в себя сервер, предназначенный для сбора и обработки информации, поступающей от приборов СЛТ, хранение аварийно-предупредительной сигнализации в необходимом объёме, обеспечения связи между СУ ТС и внешними системами. Взаимодействие между компонентами системы осуществляется посредством коммутаторов Ethernet 7.
Сопряжение СУ ТС с техническими средствами судна 15 производится посредством программируемых логических контроллеров (ПЛК) 12, обеспечивающих обмен сигналами следующего вида:
- дискретные (сигналы типа «сухой контакт» и потенциальные сигналы 24 В постоянного тока);
- аналоговые (4-20 мА (0-20 мА), 0-10 В (-10 - +10 В), Pt100);
- цифровые (RS-485(Modbus-RTU), Ethernet(Modbus-TCP)).
К контролируемым с ЦДУ и местного (судового) поста управления техническим средствам судна относятся главная энергоустановка, электроэнергетическая система, общесудовые системы (система водоотливная и осушительная, система контроля аварийных масс воды в отсеках, система перетока (креновая), система водяной защиты, система вентиляции и кондиционирования воздуха, система сжатого воздуха, система контроля водонепроницаемых и противопожарных дверей, валопроводы ЛБ и ПрБ, система масляная, система топливная и т.д.).
СУ ТС 1 обеспечивает следующие функции:
- отображение на дисплее рабочей станции в графической форме (мнемосхемы) в виде набора дисплейных кадров;
- сбор и отображение информации о состоянии технических средств;
- блокировку сигнализации неработающих механизмов;
- выдачу аварийно-предупредительной сигнализации (АПС) с квитированием;
- управление техническими средствами посредством интерфейса рабочей станции либо по командам, полученным от ЦДУ;
- контроль работоспособности СУ ТС и ее составных частей;
- контроль и диагностику технических средств судна;
- поиск и локализацию отказавшего элемента СУ ТС;
- сохранение контролируемых параметров, в том числе АПС;
- контроль основного и резервного питания системы с обеспечением, в случае возникновения отказа одного из источников питания (основного или резервного), работоспособности и соответствующей АПС.
Система удаленного доступа (СУ) 2 предназначена для предоставления удаленного доступа к функциям управления, контроля и диагностики судна.
Бортовая часть СУ представляет собой локальную сеть, реализованную на коммутаторах 7, состоящую из оборудования бортовой части 9, и общую или маршрутизируемую сеть с локальной сетью СУ ТС и САУД и предназначена для приема входящих подключений из берегового сегмента сети и передачи данных в локальную сеть СУ ТС и САУД.
Интернет сегмент представляет собой публичную/глобальную сеть Интернет, состоящую из оборудования поставщиков связи (Интернет провайдеров) 16, предназначенную для передачи маршрутизируемого потока данных.
Система удаленного доступа обеспечивает:
- передачу навигационной информации, полученной от САУД;
- передачу команд управления, сигналов АПС во всех режимах движения судна;
- возможность передачи управления между операторами на борту судна и центром дистанционного управления (ЦДУ);
- удаленный защищенный доступ через сеть Интернет (GSM) в реальном времени на берегу и на борту судна (в пределах покрытия GSM сети);
- шифрование и передачу данных на береговую часть;
- архивирование полученных данных;
- удаленную настройку и наладку судового оборудования с берега;
- вывод на печать зарегистрированной информации и отчетов;
- самоконтроль системы.
САУД 3 предназначена для обеспечения режимов движения, позволяющих осуществлять дистанционное управление судном из берегового ЦДУ с возможностью перехода на ручное управление при движении в море и ручное управление с поддержкой принятия решения.
Оборудование САУД разделяется на три уровня:
а) верхний уровень - два комплекта аппаратуры операторской станции 5 (основной и дополнительный), предназначенные для организации интерфейса управления оператора.
б) средний уровень - две стойки основного оборудования (основная и резервная), предназначенные для выполнения функциональных задач. Каждая стойка включает в себя сервер подсистемы навигации 10, сервер управления движением судна 11.
в) нижний уровень оборудования - приборы сопряжения 14 с локальными системами управления (ЛСУ) 18 техническими средствами движительно-рулевого комплекса (ТС ДРК) (главные двигатели, рулевые машины, винто-рулевые колонки с винтом регулируемого шага, азиподы, подруливающие устройства, выдвижные винто-рулевые колонки и др.).
Приборы сопряжения включают в себя программируемый логический контроллер 13 с набором устройств ввода-вывода для обеспечения сопряжения с ЛСУ ТС ДРК 18.
Для передачи данных между составными частями системы предусмотрено две сети оптоволоконной связи стандарта Ethernet, организованных на коммутаторах 7:
1) кольцо, обеспечивающее связь между оборудованием верхнего уровня, оборудованием среднего уровня и СУ;
2) кольцо, обеспечивающее связь между оборудованием среднего уровня и оборудованием нижнего уровня.
Сопряжение каждой стойки основного оборудования с системой ситуационной осведомленности (ССО) 17 осуществляется по одной линии связи стандарта Ethernet.
Сопряжение оборудования нижнего уровня с ЛСУ ТС осуществляется по линии связи стандарта Ethernet, дискретным, цифровым и аналоговым линиям связи.
САУД обеспечивает:
- автономное управление движением судна с основного или резервного комплекта аппаратуры, а также с берегового ЦДУ с категорией автономности RCMC-MCDS (RCMC - дистанционное управление с возможностью перехода на ручное при движении в море и MСDS - ручное управление с поддержкой принятия решения при проходе узкостей и при входе в порт.
Операторские станции 5 из состава САУД обеспечивают выполнение функций электронной картографической навигационно-информационной системы (ЭКНИС), включая загрузку и отображение электронных навигационных карт (ЭНК), предварительную и исполнительную прокладку маршрута движения.
Сервер подсистемы навигации 10 из состава САУД обеспечивает:
- выполнение при движении по маршруту маневрирования для предотвращения опасного сближения с другими судами в соответствии с МППСС-72;
- получение обобщенной навигационной обстановки в районе плавания по данным навигационных систем судна и радиолокационного комплекса;
- построение маршрута движения судна в соответствии с рейсовым заданием, возможностями автономного и дистанционного управления судна с соблюдением правил безопасности мореплавания и оценки факторов риска;
- сбор и передачу навигационных данных, команд управления, сигналов аварийно-предупредительной сигнализации (АПС) в подсистему детальной регистрации данных, из состава системы управления техническими средствами, в объеме, необходимом для восстановления и воспроизведения движения корабля в период рейсового задания;
- представление оператору информации о состоянии активных средств управления судном;
- анализ навигационной обстановки и выработку рекомендаций по безопасному расхождению судов, предупреждению посадки на мель и столкновения с объектами морской инфраструктуры;
- определение возможных аварий движения и столкновения с судами и плавающими объектами;
- информационную поддержку оператора и выдачу предупреждений, если оператором выбираются потенциально опасные действия.
Сервер управления движением судна 11 из состава САУД обеспечивает:
- удержание судна по заданному из ЦДУ маршруту и осуществление автоматизированного управления движением судна по курсу переданного из ЦДУ;
- удержание заданного курса судна, начиная от скорости, соответствующей нижнему пределу управляемости судна;
- удержание заданной скорости хода судна, начиная от скорости самого малого переднего хода и до скорости полного переднего хода;
- управление движением и маневрированием судна путем выработки сигналов управления на исполнительные механизмы движительно-рулевого комплекса.
Система функционирует следующим образом:
в режиме дистанционного управления движением судна система управления техническими средствами и движением МАНС обеспечивает:
- автоматизированное маневрирование и управление движением судна;
- информационную поддержку при дистанционном управлении движением из ЦДУ.
Вышеуказанные режимы обеспечиваются системой на отрезке движения судна после прохода приемного буя при выходе из порта выхода и до пересечения судном внутренней границы портовой акватории порта назначения в зоне покрытия беспроводной связи с ЦДУ.
Связь между системой управления движением САУД через систему передачи данных и оператором ЦДУ может поддерживаться постоянно (при необходимости). В связи с тем, что экипаж будет постоянно находиться на судне, необходимость в постоянной связи не требуется. Постоянная связь необходима только при дистанционном управлении судном оператором из берегового поста (управление с ЦДУ).
В случае попадания судна в зону отсутствия связи с ЦДУ система передачи данных должна сформировать и выдать через систему удаленного доступа аварийный сигнал (НЕТ СВЯЗИ с ЦДУ), система САУД автоматически формирует аварийный сигнал вахтенному о необходимости перевода судна на ручное управление. Одновременно с выдачей аварийного сигнала на пульт управления вахтенного в САУД запускается таймер, и если в течении заданного времени оператором (вахтенным) не выполнен перевод на ручное управление, начинает реализовываться аварийный режим.
В каждом конкретном случае в зависимости от окружающей обстановки возможны различные варианты реализации аварийного режима, такие как:
- снижение хода до минимально возможного при прямолинейном движении судна с учётом длительности участка прямолинейного движения. Движение на малом ходу осуществляется до окончания прямолинейного участка пути в режиме «ожидания» связи с ЦДУ или перевода судна в ручной режим управления;
- снижение хода до полного останова.
При переводе в режим ручного управления с борта судна система управления техническими средствами и движением МАНС функционирует в режиме поддержки принятия решений.
При использовании системы в качестве системы поддержки принятия решений:
- все действия, предпринимаемые оператором в области управления силовым и рулевым оборудованием, включая обработку нештатных ситуаций, проверяются системой поддержки принятия решений;
- система поддержки принятия решений выдает предупреждение в случае, если оператор выбирает действия, которые могут привести к нежелательным последствиям.
В системе управления движением САУД реализована функция самодиагностики как при первичном включении, так и в процессе работы. Диагностике подлежат как собственные аппаратные средства, так и каналы связи, в том числе с сопрягаемым оборудованием.
Система оснащена штатными средствами хранения информации (сервер из состава СУ ТС) на всё время автономности судна.
Дополнительно реализована возможность резервного хранения данных на срок не более 30 суток. Резервное хранение осуществляется сервером из состава системы удаленного доступа СУ.
Обеспечена возможность передачи хранимых данных из СУ в ЦДУ по запросу оператора через систему передачи данных.
Система управления движением САУД полностью контролирует движительное, рулевое оборудование и вспомогательные системы во всех возможных режимах их эксплуатации.
Персонал ЦДУ контролирует параметры и, при нахождении судна в автоматическом или дистанционном режиме, может вмешиваться в процесс управления судном.
Система автоматизации организована таким образом, чтобы ответственный персонал своевременно получал уведомление или предупреждение о ситуации до выполнения команды. Предусмотрена возможность ручного вмешательства в управление пропульсивных механизмов и подруливающих устройств из ЦДУ при условии, если судно идёт в автоматическом режиме.
Отличительной особенностью заявляемой системы управления техническими средствами и движением МАНС является реализация режима дистанционного управления МАНС с экипажем на борту, при этом система обеспечивает своевременное информирование экипажа судна о необходимости перехода на ручное управление в результате постоянного контроля исполнения команд от ЦДУ на предмет не превышения допустимых отклонений. Система, за счёт реализации в её составе системы управления техническими средствами, интегрированной с системой удаленного доступа, также обеспечивает управление техническими средствами судна, включая ОСС, и их контроль из ЦДУ и с местных постов.
Опытный образец системы управления техническими средствами и движением МАНС разработан и изготовлен в АО «Концерн «НПО «Аврора». Предварительные и приёмочные испытания, проведённые на опытном образце, показали, что заявленная система позволяет обеспечить дистанционный режим управления судном (акт приёмочных испытаний прилагается).
Источники информации
1. Положение по классификации морских автономных и дистанционно управляемых надводных судов, НД № 2-030101-037, Российской морской регистр судоходства, Санкт-Петербург, 2020 год.
2. Международные правила предупреждения столкновений судов в море (МППСС-72).
| название | год | авторы | номер документа |
|---|---|---|---|
| НАВИГАЦИОННЫЙ ТРЕНАЖЁР | 2023 |
|
RU2838905C2 |
| Способ управления координированной групповой деятельностью буксиров-автоматов | 2023 |
|
RU2823051C1 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ БУКСИРА ПОРТОВОГО ФЛОТА В РЕЖИМЕ ДИСТАНЦИОННОГО ПИЛОТИРОВАНИЯ | 2022 |
|
RU2794384C1 |
| ОПЫТОВЫЙ МОРСКОЙ МОДУЛЬНЫЙ КОМПЛЕКС | 2021 |
|
RU2760823C1 |
| СИСТЕМА МОНИТОРИНГА ТЕХНИЧЕСКОГО СОСТОЯНИЯ СРЕДСТВ СВЯЗИ И НАВИГАЦИОННОГО ОБОРУДОВАНИЯ | 2021 |
|
RU2774400C1 |
| СПОСОБ МОНИТОРИНГА ТЕХНИЧЕСКОГО СОСТОЯНИЯ СРЕДСТВ СВЯЗИ И НАВИГАЦИОННОГО ОБОРУДОВАНИЯ | 2021 |
|
RU2773048C1 |
| НАВИГАЦИОННЫЙ ИСПЫТАТЕЛЬНЫЙ КОМПЛЕКС | 2024 |
|
RU2828932C1 |
| КОМПЛЕКС ОПТИЧЕСКОГО ВИДЕОНАБЛЮДЕНИЯ, ОБНАРУЖЕНИЯ И ИДЕНТИФИКАЦИИ ОБЪЕКТОВ НА ОСНОВЕ МАШИННОГО ЗРЕНИЯ ДЛЯ МОРСКИХ И РЕЧНЫХ СУДОВ | 2023 |
|
RU2816392C1 |
| СПОСОБ ПРОВОДКИ, ШВАРТОВКИ И ОТШВАРТОВКИ МОРСКОГО ГРУЗОВОГО СУДНА В АВТОНОМНОМ РЕЖИМЕ И СПОСОБ РАБОТЫ ЦИФРОВОЙ ИНСТРУМЕНТАЛЬНОЙ ПЛАТФОРМЫ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ГРУППЫ АВТОНОМНЫХ СУДОВ-БУКСИРОВ В ПОРТОВОЙ АКВАТОРИИ | 2023 |
|
RU2809129C1 |
| Комплекс навигации и управления кораблем | 2022 |
|
RU2786251C1 |

Система управления техническими средствами и движением морских автономных дистанционно управляемых надводных судов (МАНС) содержит систему управления техническими средствами (СУ ТС), систему дистанционного управления (СДУ), систему автономного управления движения (САУД). СУ ТС содержит основную и резервную локальные технологические станции, операторскую станцию, комплект аппаратуры для встройки. СДУ содержит бортовую часть, включающую коммутаторы и оборудование бортовой части, соединенные посредством локальной маршрутизированной сети, и наземную часть в виде центра дистанционного управления (ЦДУ). САУД содержит оборудование, включающее верхний уровень, состоящий из основного и дополнительного комплектов аппаратуры операторской станции, средний уровень, включающий основную и резервную стойки, каждая из которых включает в себя сервер подсистемы навигации, сервер управления движением судна, нижний уровень, включающий приборы сопряжения, состоящие из программируемого логического контроллера с набором устройств ввода-вывода, с локальными системами управления (ЛСУ) техническими средствами движительно-рулевого комплекса. Обеспечивается дистанционное управление судном из берегового ЦДУ с возможностью перехода на ручное управление при движении в море и ручное управление с поддержкой принятия решения, в том числе управление и контроль технических средств судна. 1 ил.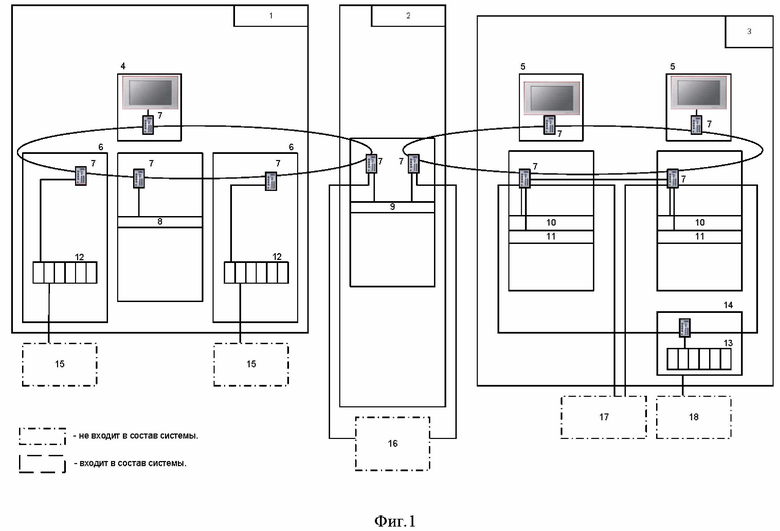
Система управления техническими средствами и движением морских автономных дистанционно управляемых надводных судов (МАНС), включающая систему управления техническими средствами (СУ ТС), систему дистанционного управления (СДУ), систему автономного управления движения (САУД), отличающаяся тем, что СУ ТС содержит основную и резервную локальные технологические станции, операторскую станцию, комплект аппаратуры для встройки, включающий в себя сервер, предназначенный для сбора и обработки информации поступающей от приборов станции локальной технологической (СЛТ), хранение аварийно-предупредительной сигнализации в необходимом объёме для обеспечения связи между СУ ТС и внешними системами, при этом сопряжение СУ ТС с техническими средствами судна производится посредством программируемых логических контроллеров (ПЛК), кроме того, СДУ содержит бортовую часть, включающую коммутаторы и оборудование бортовой части, соединенные посредством локальной маршрутизированной сети, и наземную часть в виде центра дистанционного управления (ЦДУ), выполненного с возможностью передачи маршрутизированного потока данных, включающего навигационную информацию, команды управления, команды для передачи управления между операторами на борту судна и ЦДУ, а САУД содержит оборудование, включающее верхний уровень, состоящий из основного и дополнительного комплектов аппаратуры операторской станции, предназначенных для организации интерфейса управления оператора, средний уровень, включающий основную и резервную стойки основного оборудования, предназначенные для выполнения функциональных задач, при этом каждая стойка включает в себя сервер подсистемы навигации, сервер управления движением судна и нижний уровень, включающий приборы сопряжения, состоящие из программируемого логического контроллера с набором устройств ввода-вывода, с локальными системами управления (ЛСУ) техническими средствами движительно-рулевого комплекса (ТС ДРК).
| Пневматический привод автоматических потенциометров и уравновешенных мостов | 1950 |
|
SU90043A1 |
| ПРИСПОСОБЛЕНИЕ ДЛЯ НАКАТКИ ЗУБЧАТЫХ ПРОФИЛЕЙ | 0 |
|
SU181032A1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ | 2011 |
|
RU2494006C2 |
| US 11738835 B2, 29.08.2023 | |||
| CN 110155289 A, 23.08.2019 | |||
| US 20220388619 A1, 08.12.2022. | |||

