Изобретение относится к области энергетического машиностроения, а именно, к способам использования энергии течения рек, морских течений, импульса волн.
На данный момент имеется большое количество способов и устройств, трансформирующих энергию течений морей и рек в другие виды энергии, в электроэнергию, в механическую энергию движения различных устройств и т.д.
Так известна «УСТАНОВКА ДЛЯ ИСПОЛЬЗОВАНИЯ ЭНЕРГИИ ПРИЛИВНЫХ ТЕЧЕНИЙ» заявка 2013151424/13 от 19.11.2013. Основными недостатками которого являются: наличие спиралевидной лопасти, не позволяющей использовать энергию потока в полной мере из-за эффекта противодействия поверхностей лопастей по направлению потока, влияние посторонних предметов, которые могут попадать в лопасти (например, топляк), освобождение от которого представляет собой технически сложную задачу, связанную с подводными работами.
Известно «УСТРОЙСТВО ДЛЯ ИЗВЛЕЧЕНИЯ ЭНЕРГИИ ИЗ МОРСКИХ ТЕЧЕНИЙ» заявка 2009142189/03 от 16.11.2009. Основными недостатками которого являются: наличие большого количества трубопроводов подверженных отложениям морского прибрежного мусора, необходимость сложных донных работ, наличие зазоров между цилиндрическими опорами - оболочками, которые так же в процессе эксплуатации будут забиваться морским мусором (топляком).
Известен способ получения энергии из морских течений: «СПОСОБ ИЗВЛЕЧЕНИЯ ЭЛЕКТРИЧЕСКОЙ ЭНЕРГИИ ИЗ МОРСКИХ ТЕЧЕНИЙ» изложенный в заявке 2009148822/06 от 28.12.2009.
Недостатками этого способа являются: использование незначительного гидростатического перепада, так как скорости морских течений обычно невелики, наличие каналов и протоков, подверженных засорению морским мусором.
Кроме указанных ранее способов известны устройства, реализующие гироскопические эффекты в целях преобразования угловых перемещений и энергии волн в электроэнергию.
Наиболее близким аналогом, в смысле используемых гироскопических эффектов, является «ГИРОСКОПИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ ЭНЕРГИИ МОРСКИХ ВОЛН» Заявка 2018138702, 01.11.2018.
Основным недостатком этого устройства является невозможность использования энергии морских течений и кинетической энергии фазовой скорости волн, так как предлагаемый преобразователь не имеет для этого необходимых компонентов конструкции поплавка. Кроме того поверхность, взаимодействующая с волной относительно мала, в то время как очевидно, что суммарная энергия переносимая волной зависит от погонной, то есть фронтальной, длины волны.
Задачей, на решение которой направлено изобретение, является использование энергии морских и речных течений, фазовой и объемной скорости волн, отказ от сложных донных сооружений и связанных с этим донных монтажных работ, отказ от подвижных частей и валов, проходящих сквозь уплотнения внутрь герметичного корпуса плавучих конструкций, отказ от каналов, проходящих сквозь герметичные корпуса объектов, достижения модульности, позволяющей просто наращивать мощности генерации по заявленному способу, достижения универсальности в виде использования устройств и плавающих объектов (функционирующих по заявленному способу) как на морских, так и на речных акваториях, минимизация экологических издержек.
Технический результат заключается в том, что динамически неустойчивый объект, и, или его часть, совершают угловые колебательные движения с угловой скоростью достаточной для того, чтобы гирогенератор вырабатывал больше энергии, чем необходимо для поддержания его работы.
Указанная задача решается путем использования установленного в корпус или в сочлененные корпуса, или на корпус (корпуса) плавающего объекта блока (или блоков), в составе системы управления и одного или более силовых гироскопов, совершающих вынужденные вращательные движения по мере совершения плавающим объектом периодических колебаний, обусловленных тем, что параметры удержания объекта в потоке, а так же его гидродинамические и гидростатические свойства подбирают так, чтобы объект был динамически неустойчивым, то есть так, чтобы объект находился в самоподдерживающемся автоколебательном режиме под воздействием кинетической энергии потока жидкости.
Раскрытие сущности изобретения.
Сущность изобретения состоит в том, что для утилизации потока энергии, переносимого водой, используют объекты с низкой динамической устойчивостью, функционирующие как в глубине водного потока, так и на границе сред вода-воздух, как однокорпусные, так и сочлененно-составные, гидродинамические и гидростатические свойства и особенности крепежа которых таковы, что объекты, или их части, совершают под воздействием набегающего потока самоподдерживающиеся колебания, которые используют как источник механической энергии для вынужденных прецессионных движений одного или нескольких силовых гироскопов, размещаемых в составе блока или блоков, оснащенных системой управления, поддерживающей движения гироскопов с заданными скоростью и направлениями и осуществляющей необходимую автоматизацию и адаптацию к режимам колебаний. Развиваемые гироскопом, или гироскопами вращающие моменты, развиваемые силовыми гироскопами, преобразуют в электроэнергию или энергию давления газа.
Таким образом, для реализации способа используют закрепленный динамически неустойчивый объект, совершающий под воздействием набегающего потока воды достаточно быстрые самоподдерживающиеся колебательные движения, позволяющие генерировать энергию большую, чем это необходимо для функционирования системы управления и для поддержания вращения гироскопов. При этом достаточно быстрые колебания могут совершать части объекта, если он выполняется в составном варианте. В морской практике известны виды неустойчивости надводных судов по курсу - рыскливость, по бортовой качке - низкая остойчивость. Для предлагаемого способа могут использовать все виды специально запроектированной неустойчивости: высокая рыскливость, низкая остойчивость, и неустойчивость по дифференту, характерная для подводных лодок. Такой объект может совершать произвольные движения по условно замкнутым траекториям любой сложности, как на поверхности, так и в толще воды (подобно неустойчивому воздушному змею), в том числе ныряющие, тем самым обеспечивая взаимодействие с большей массой движущейся воды, и как следствие больший отъем энергии у потока. Если объект реализуют составным, такой объект может совершать все перечисленные виды колебаний, однако кроме того его сочленения могут совершать колебания относительно друг-друга, поглощая как энергию естественной вихревой компоненты потока, так и вызванную взаимодействием корпуса и движущейся воды Таким образом, главным и общим техническим свойством применяемого объекта, удерживаемого в потоке, является его слабая устойчивость в набегающем потоке, обеспечивающая достаточно быстрое для эффективной гирогенерации изменение углового положения объекта как целого, либо его составных частей.
Далее технологические связки: гироскопы, системы управления ими, системы преобразования энергии будут называться гирогенераторами. Подверженные гидродинамическим колебаниям плавающие объекты (в том числе составные - многокорпусные), являющиеся носителями гирогенераторов далее будут именоваться - объекты. Корпус в котором помещается указанный блок с гирогенератором или гирогенераторами, или корпус на который снаружи помещается этот блок будет называться вмещающим. Приводимые в заявке изображения и примеры не являются изображениями и примерами каких-либо конкретных устройств, функционирующих по предлагаемому способу, они служат целям пояснения сути способа в возможных вариантах его реализации для разнообразных динамически неустойчивых объектов.
Примеры возможных реализаций способа.
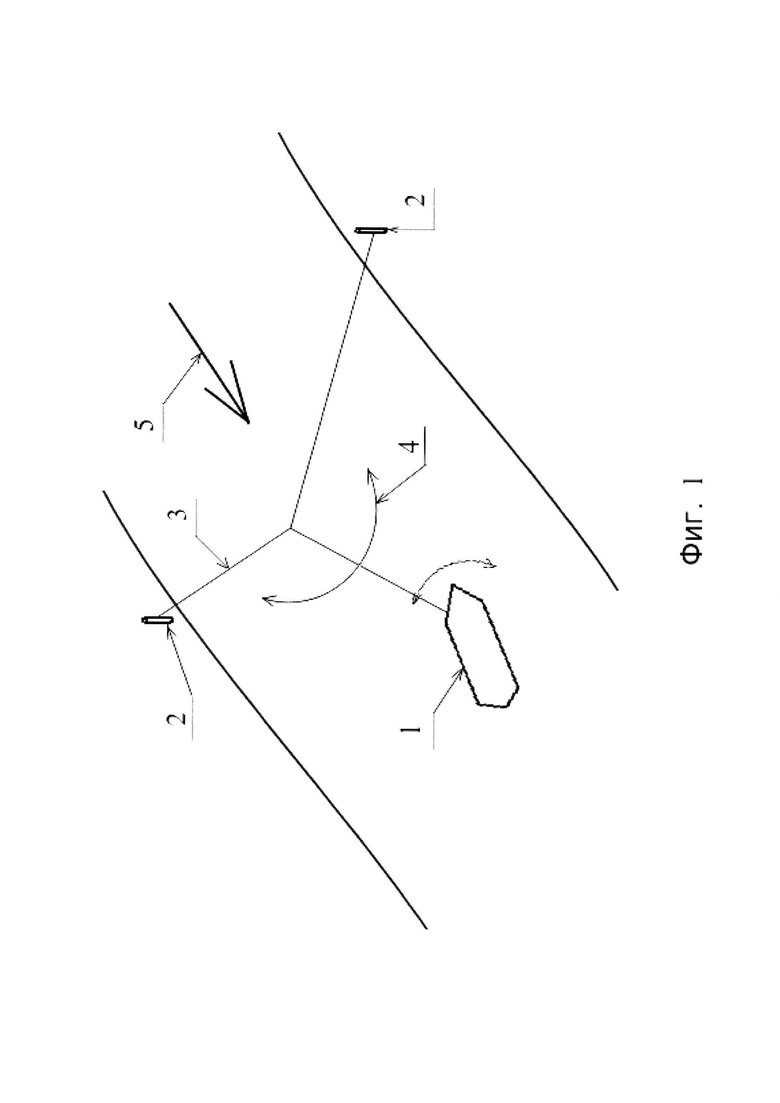
На (Фиг. 1) представлен, условно, облегченный вариант крепления и использования такого объекта. Небольшая переносная энергоустановка закрепляется на перекинутом через ручей бревне, или на колу, вбитом в дно реки, или на тросовой растяжке. На (Фиг. 1) стрелкой (5) показано направление потока ручья (реки), растяжка (3), закрепленная на берегу колышками (2), удерживает тросиком (4) объект (1), который совершает угловые колебания (обозначенные полукруглыми стрелками у его носа), кроме того условно обозначены угловые перемещения тросика (4). Подобным образом могут удерживаться и гораздо более мощные (в том числе составные) объекты как по одному, так и группами, например креплением к опорам мостов, к вбитым в дно сваям, к переброшенным между берегами тросам, заякоренным понтонам (связанным тросовыми системами или без таковых) и им подобным базовым средствам, обеспечивающим удержание объектов. Совершенно очевидно, что такой объект (1) может состоять из нескольких сочленений (как снабженных гирогенетарами вмещающих корпусов, так и несущих чисто силовую функцию), совершающих угловые колебания относительно друг-друга, в этом случае его движения будут напоминать движения рыбы. Для беспогружного объекта вполне допустим прямой крепеж троса к дну рек и морей, когда это целесообразно, несмотря на то, что такой донный трос создает дополнительное сопротивление колебательному движению объекта. В морских условиях возможны подобные типы крепежа к тросовым, понтонным, свайным и якорным устройствам, тросовое удержание с борта корабля и т.п, конкретная реализация удержания объектов в потоке для реализации способа не является чем то принципиальным. Если объект подобный приведенному на фиг. 1 выполнен однокорпусным, то применение двух и более силовых гироскопов может стать целесообразным, так как их конструктивное размещение на носу и корме объекта придаст системе в целом дополнительный момент инерции за счет общей инертной массы гирогенераторов. В случае составного объекта такие же гироскопы, по мере целесообразности, могут быть размещены в каждом из сочленений или в некоторых. Эти же соображения касаются примеров возможных объектов представленных далее на фиг. 2, 3, 6.
В случаях, когда использование объектов на поверхности нецелесообразно, они могут размещаться в толще воды, если глубины это позволяют. В этом случае объекты могут двигаться по достаточно сложным пространственным траекториям как поперек потока, так и по его глубине, совершая при этом сложные собственные колебательно-вращательные движения по крену, рысканию и тангажу, а случае составного объекта и сложные движения сочленений относительно друг-друга. В целях интенсификации собственных угловых движений объекта может быть использована разница плотности сред вода-воздух. В этом случае объекты совершают движения выныривания и последующего ныряния в водную среду, что может осуществляться как в одной вертикальной плоскости подобно маневру подводных лодок под названием «прыжок касатки», так и в составе более сложных эволюции, связанных с вращениями объекта по тангажу, рысканию и крену (и его составных частей относительно друг-друга), что более свойственно рыбам, дельфинам и китам.
В возможных условиях высокой стабильности колебаний объекта технически возможен, но не является обязательным, вращательный режим гирогенератора, когда он либо совершает некоторое количество оборотов одну из сторон, а затем в обратную, либо совершает вращательные движения только в одну сторону без обратного хода. Такие режимы являются резонансными или близкими к резонансу, они технически реализуемы путем регулировки системой управления тормозящего эффекта, возникающего как реакция от устройства, преобразующего крутящий момент, развиваемый гироскопом в электроэнергию (электрогенератора), энергию сжатого воздуха (генератора давления).
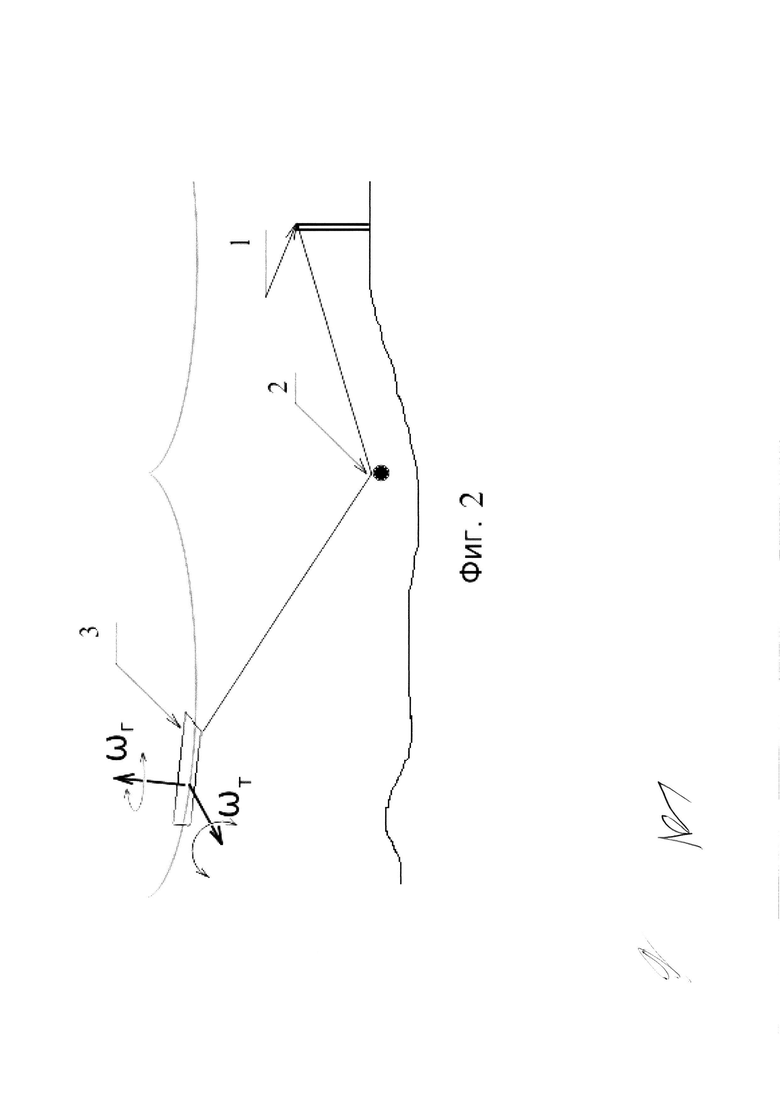
Кроме речных течений способ применим для морских течений, как постоянных (вроде Гольфстрима или Куросиво), так и для периодических: приливных и волновых. При этом доступны к использованию не только однонаправленные глубинные или поверхностные течения, приливные или инициируемые ветром, например такие, которые наблюдаются в дельтах рек (например, Невы), но и о собственно волновые движения, так как в случае с обычной ветровой волной (согласно трохоидальной теории морских волн) приповерхностные объемы воды в процессе волнения совершают либо круговые движения, либо эллиптические, при этом большая ось эллипса горизонтальна. При волнении в приповерхностном слое воды образуются микротечения короткой периодичности, порядка нескольких секунд, что при соответствующей гидродинамике аппарата и соответствующем крепеже может быть использовано по заявленному способу. Примером такого крепежа может стать поднимаемый канатом или цепью от дна груз, или просто относительно тяжелая цепь. Один из возможный примеров приведен на (Фиг. 2), здесь: 1 - свая, 2 - груз с канатной системой, 3 - объект. Кроме того, в случае использования микротечений ветровой волны, гирогенерационный принцип позволяет использовать дополнительно и угловые перемещения объекта по тангажу в ходе его эволюций от подошвы волны к вершине и обратно. В результате объект совершает дополнительное угловое перемещение, на (Фиг. 2) эта особенность движения объекта показана векторами мгновенных угловых скоростей объекта: ωг - гидродинамической (обусловленной формой и (или) рулями объекта) и ωт - тангажной (волновой). Эти мгновенные угловые скорости показаны перпендикулярными друг другу, что для реального объекта не является обязательным условием. Кроме того, составные объекты способны утилизировать компоненту энергии волны связанную с ее фазовой скоростью и переносимым волной продольным импульсом (потоком энергии), так как в этом случае составляющие объекта способны совершать угловые колебания относительно друг-друга.
Необходимым условием реализации технических устройств по заявленному способу является способность объекта совершать угловые эволюции на поверхности воды и (или) в ее толще под воздействием гидродинамического потока или продольного импульса волн. Для этих целей применимы как управляемые объекты, например объекты, использующие управляемые рули, так и неуправляемые объекты имеющие рули (в том числе неподвижные и, или неуправляемые подвижные), так и объекты сама форма (или особенности сочленения) которых является таким рулем, меняющим положение центра давлений в зависимости углового положения объекта относительно потока. При этом неуправляемый тип объектов предпочтительнее, так как отпадает необходимость энергозатрат на привод рулей, исключается опасность протечек внутрь герметичного корпуса сквозь уплотнения валов рулей. Объекты не располагающие подвижными рулями, управляемыми за счет вырабатываемой на их борту гирогенераторами энергии, проектируют с учетом основного базового принципа: а именно с учетом обеспечения динамической неустойчивости объекта в набегающем (относительно объекта) потоке. Поскольку варианты реализации данного принципа весьма многочисленны, приведем дополнительно некоторые из возможных.
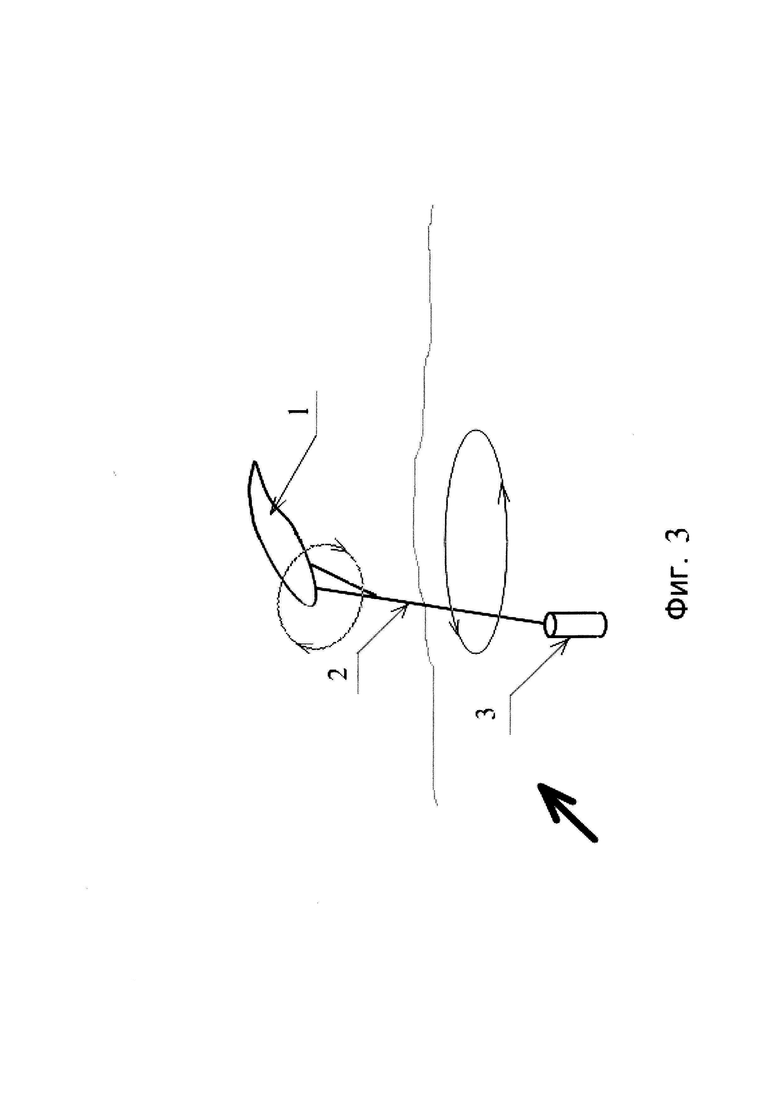
На (Фиг. 3) приведен объект (1), совершающий пространственные и угловые эволюции в толще воды. Направление течения показано жирной стрелкой, объект (1) совершает эволюции, которые обусловлены двумя основными движениями, они показаны круговой стрелкой у его носка и эллиптической стрелкой у удерживающего объект каната (2). Канат закреплен условно изображенным якорным или иным донным устройством (3). Форма объекта и способ крепежа объекта к канату выбирают так, чтобы максимально интенсифицировать изъятие кинетической энергии из набегающего потока.
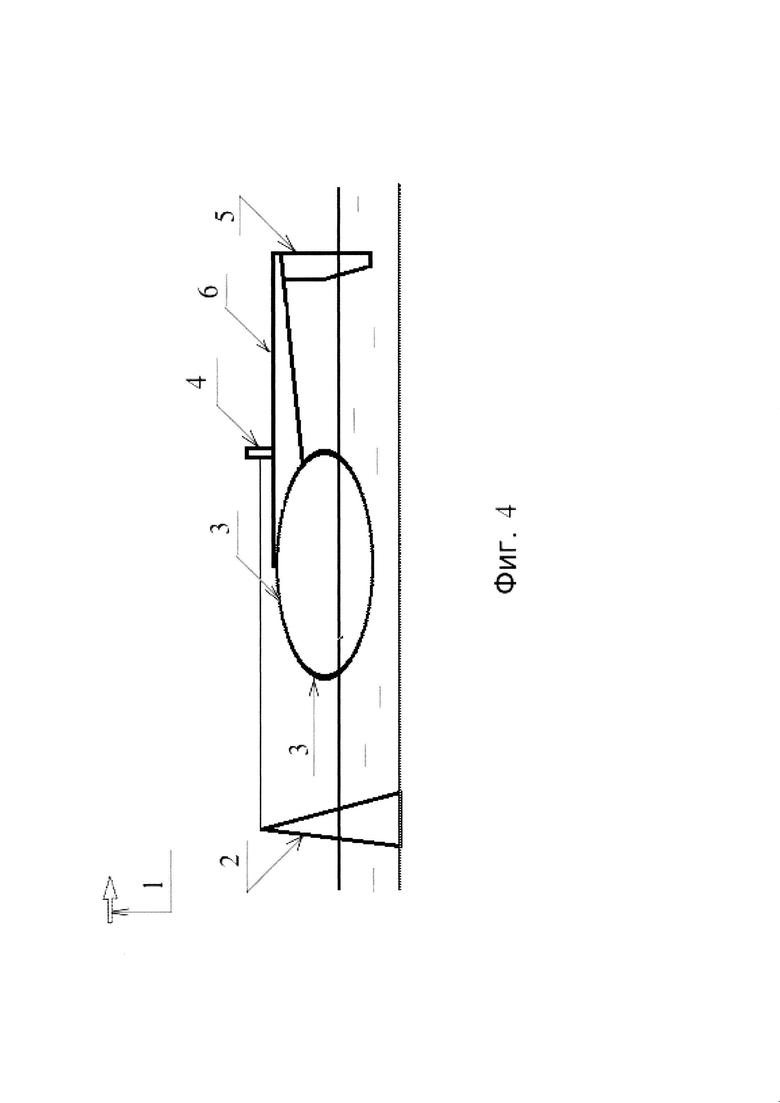
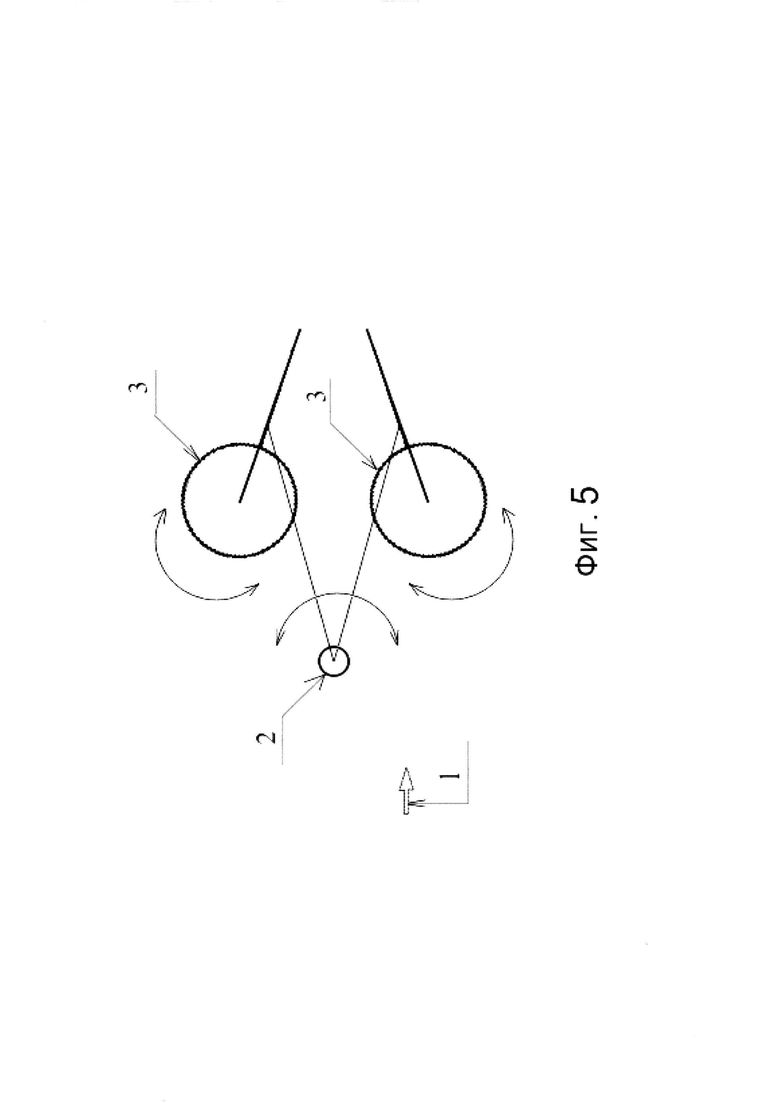
На (Фиг. 4) изображен объект (3), подобный тому, который использовали авторы в экспериментах. Объект (3), состоящий из вытесняющего эллипсообразного поплавка, штанги (6) и руля (5), представляет собой вариант объекта поверхностного (беспогружного, неныряющего) типа, совершающего колебания в набегающем речном потоке с направлением (1). Объект удерживался опорой (2). Крепеж линем осуществлялся в точке (4), эта точка на штанге (6) выбиралась в ходе эксперимента так, чтобы она располагалась дальше центра давлений объекта (3) в его первоначальном положении, когда продольная ось объекта была ориентирована по набегающему потоку. В результате объект приобретал неустойчивость, которая выражалась в том, что объект начинал эволюции, как это показано на (Фиг. 5), здесь представлен вид этого же объекта сверху. Когда объект разворачивался к набегающему потоку под большим углом, центр давлений смещался за точку крепежа, в результате объект разворачивался и двигался в противоположную сторону, после чего эволюция повторялась зеркально. Руль-стабилизатор (5) (Фиг. 4) выполнялся неподвижным относительно штанги (6) и симметричным, имеющим небольшую собственную положительную плавучесть. Таким образом было установлено экспериментально, что даже осесимметричный конструктивно целостный объект способен на необходимые эволюции при надлежащем выборе параметров корпуса, руля, крепежа и моментов инерции корпуса даже без применения дополнительных угловых ограничителей и поворотных рулей, как управляемых, так неуправляемых (неустойчивых относительно потока). Хотя применение подобных улучшений (ограничители и самоповортные-флаттирующие рули, составной корпус, способный к взаимным угловым перемещениям) однозначно приводит к интенсификации извлечения энергии набегающего потока, при этом тросик (4), как это показано на (Фиг. 1) сможет стать избыточным элементом.
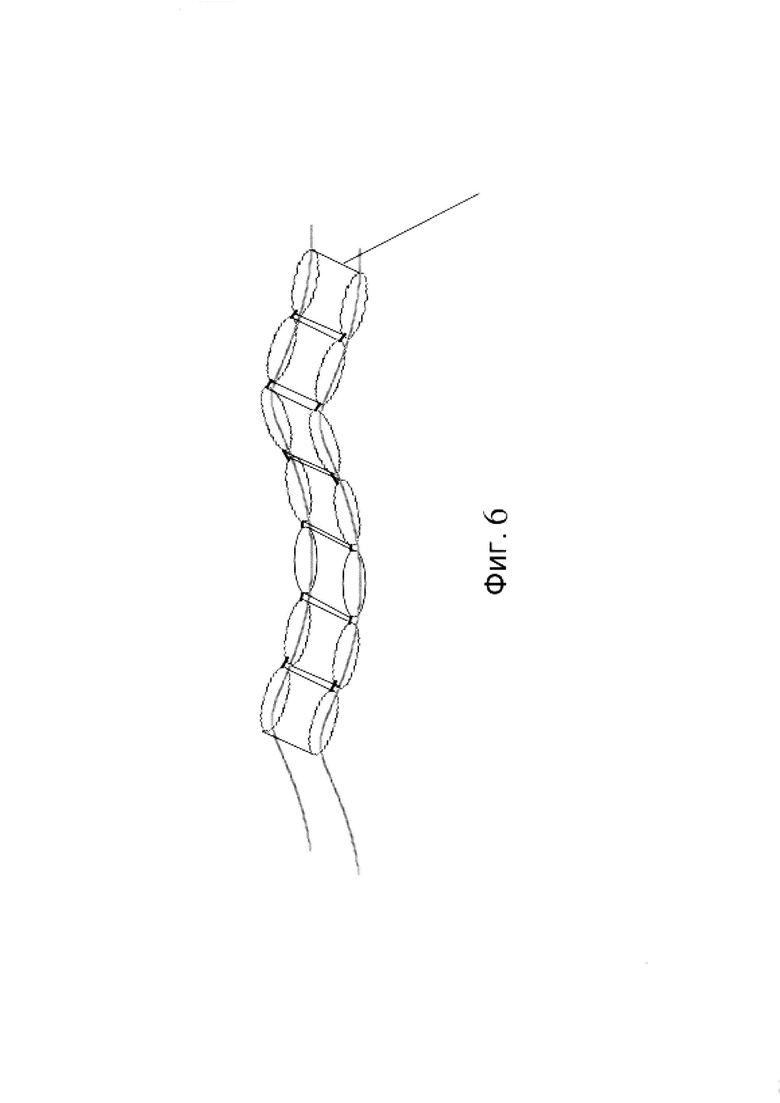
На (Фиг. 6) схематично представлен взаимодействующий с потоком энергии воды и заякоренный составной объект, расположенный горизонтально. На этом поясняющем примере (Фиг. 6) объект совершает волнообразные движения и утилизирует продольный импульс морских волн. Однако подобный по принципу действия объект может располагаться и вертикально (может быть поставлен на ребро, в зависимости от выбора ориентации плавучести элементов), и благодаря этому становится способен как утилизировать продольный импульс волн, так и энергию течений. При этом он может совершать сложные эволюции и взаимные перемещения составных частей как на поверхности, так и в толще воды.
Возможны и иные варианты объектов, отвечающим главному требованию: способность утилизировать потоки энергии воды в виде колебательных движений связанных с изменением во времени угла основного корпуса или составных частей объекта.
Непосредственное извлечение энергии вращения корпуса объекта, либо составных частей - вмещающих корпусов, производится силовыми гироскопами (одним или несколькими, работающими в компенсационном режиме или вне такового при целесообразности).
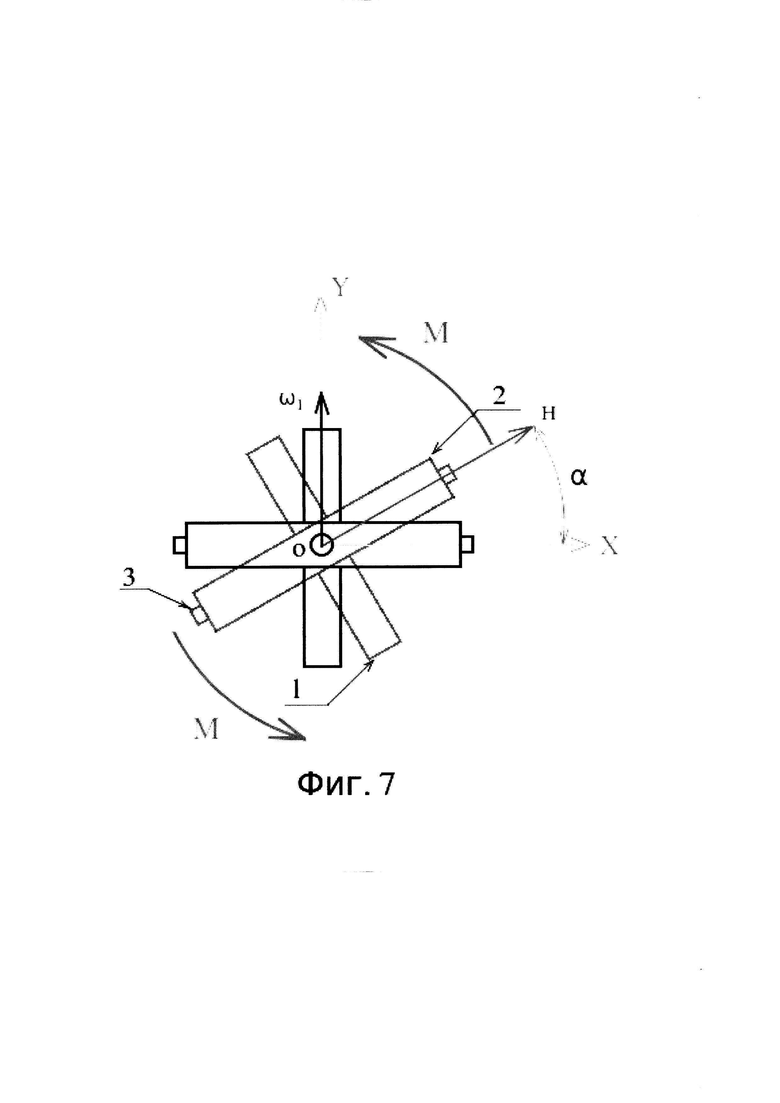
На (Фиг. 7) схематически представлен рисунок, поясняющий суть способа в части кинематики реализуемого процесса. Вращающийся гироскоп (1) (имеющий некий кинетический момент Н и подвешенный в раме (2) в уравновешенном состоянии) своими полуосями соединяется с несущей поворотной рамой (2) при помощи подшипников (3). Рама (2) крепится к корпусу (либо к механизму первоначальной ориентации основы, который тут не показан) через подшипники на оси О, посредством которых рама (2) может вместе с гироскопом (1) совершать качающие вращательные движения. Ось Y направлена в зенит (направление днище-палуба объекта), ось X направлена от кормы к носу, ось О от борта к борту. На этом же изображении показано изначально нейтральное положение рамы (2) и гироскопа (1), вдоль направления корма-нос. На (Фиг. 7) показан вращающий момент прецессии (М), развиваемый гироскопом, и стремящийся совместить ось вращения гироскопа (вектор Н) с мгновенным вектором угловой скорости ω1 в соответствии с правилом Грюэ-Жуковского. Вектор (ω1) по величине и направлению зависит от скорости рыскания объекта, и периодически меняет свое направление на противоположное, что в свою очередь меняет направление прецессионного момента (М) и вызывает обратное угловое движение гироскопа. Развиваемый гироскопом (1) крутящий момент (М) используется для привода генератора или иных устройств путем передачи крутящего момента рамы по оси (О). Возможны реализации, когда крутящий момент может сниматься либо непосредственно с рамы гироскопа, либо прямым воздействием осей гироскопа на исполняющие механизмы.
Согласно теоремы Резаля текущая мгновенная величина крутящего момента (М) зависит от угла α следующим образом: М=Н*ω1*sin(π/2-α). Исходя из сказанного, устройства, реализуемые по предложенному способу, могут снабжаться ограничителями, назначение которых состоит в том, чтобы не допустить совмещения оси гироскопа (вектор Н) с вектором ω1, так как в этом случае, при изменении вектором ω1 своего направления на противоположное, на гироскоп (1) не будут действовать никакие крутящие моменты, стремящиеся повернуть его и приводимую им во вращение раму (2) к новому направлению вектора ω1. Возможно применение упругих элементов (пружинные, пневматические и т.п.) стремящихся вернуть гироскоп (1) в изначальное нейтральное положение (или хотя бы не допустить совмещения оси гироскопа (вектор Н) с вектором ω1), кроме того, эти же упругие элементы способны запасть энергию для привода потребляющих энергию устройств. Таким образом, рама (2) совершает качательные (или вращательные) движения, характеризирующиеся изменяющимся по времени крутящим моментом, способным приводить в действие генератор какой либо конструкции и (или) иные устройства в целях утилизации энергии потока, раскачивающей плавающий объект. В иных реализациях в качестве ограничителей может выступать кинематическая схема, например в случае использования кривошипно-шатунного механизма для привода потребителя механической энергии качательного движения силового гироскопа и .т.п. Возможны резонансные режимы движения гироскопа относительно вмещающего корпуса, когда гироскоп совершает вращательные движения в одну сторону, в этом случае задача вывода гироскопа из состояния когда его ось вращения совпадает с мгновенной осью вращения вмещающего корпуса ложится на систему управления. Такие нежелательные ситуации, когда совпадает ось вращения гироскопа и мгновенная ось вращения вмещающего гироскоп корпуса, возможны в случаях, когда объект и гирогенератор переходят к другой резонансной частоте, либо только начинает движение после простоя.
Некомпенсированный момент (М) см. (Фиг. 7) через крепление генератора, через упругие элементы или силовую передачу иной природы будет передаваться на вмещающий корпус плавающего объекта. Это обстоятельство может вызвать необходимость его компенсации, этот момент может быть компенсирован установкой как минимум еще одного аналогичного (компенсационного) гироскопа, ось которого в нейтральном положении сонаправлена оси первого, но раскрученного в обратном направлении. В этом случае два разнонаправленных момента, действующих со стороны пары гироскопов на корпус, могут полностью компенсировать друг-друга.
Возможна реализация этого же способа в виде каскада силовых гироскопов, передающих колебательное усилие на последующие гироскопы с целью усиления эффекта, что может быть актуально применительно и к волновой качке, где есть не только рыскающие движения, но и движения по тангажу и крену. Например гироскоп, утилизирующий колебания по рысканию, может приводить в действие опору оси которая будет приводить в вынужденные колебания гироскоп утилизирующий колебания по тангажу, чем влияние от волнового колебания по тангажу будет усилено, далее возможна передача суммарного момента на гироскоп, утилизирующий колебания по крену и затем окончательная утилизация суммарного усилия. Учет фаз колебаний потребует соответствующей работы системы управления, организующей передачу моментов между рамами и их подвижными опорами.
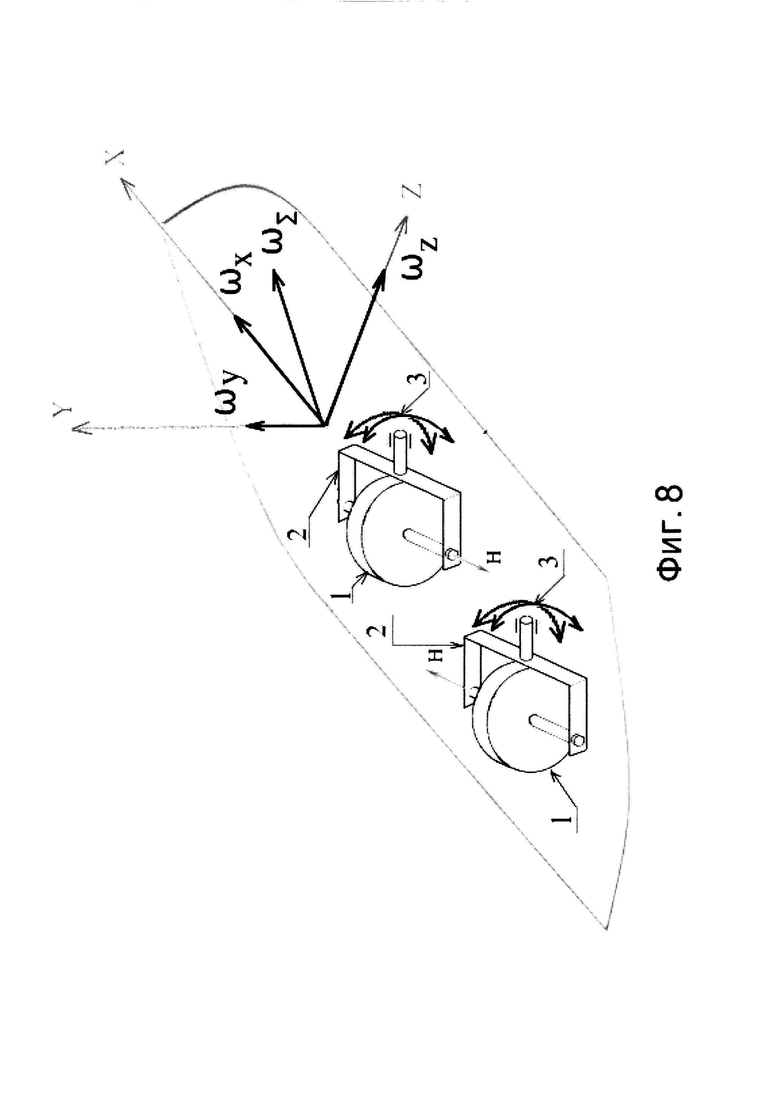
Возможна и схема, когда система управления суммирует вращательные движения вмещающего корпуса объекта по осям см. (Фиг. 8) и при помощи механизма первоначальной ориентации основы (3) поворачивает основание рамки (2), содержащей гироскоп (1) (или сборку гироскопов) в пространстве так, что суммарное периодическое вращение объекта (на изображении это мгновенный суммарный вектор - ω∑) используется оптимальным способом, в этом случае применяется либо два однотипных блока с разнонаправленными по вращению гироскопами (как это представлено на изображении), ориентированными согласованно системой управления, либо два (или более) гироскопа выполняются в одном блоке и имея общую поворотную платформу поворачиваются одновременно, тем самым система управления осуществляет адаптацию к текущей ситуации в которой находится плавающий объект.
Однако допустимы такие реализации сочлененного объекта, когда такая компенсация нецелесообразна, т.к. нескомпенсированность может усиливать вращающий эффект сегментов объекта (вмещающих гирогенераторы корпусов) относительно друг-друга, так как возникает техническая возможность организовать более эффективное взаимодействие сочленений корпуса с потоком, путем использования реакций гирогенератора на элементы корпуса в благоприятных для этого направлениях.
Достаточно очевидно, что в общем случае оси гироскопов в первоначальном положении (внутри вмещающего корпуса) могут образовывать любую пространственную конструкцию, например треугольник (если стоит задача утилизации энергии только в одной плоскости, определяемой двум осями (рыскание + тангаж, тангаж + крен, крен + рыскание), сходиться (расходиться) к центру от вершин тетраэдра (если стоит задача использовать все три оси) и т.п., в зависимости от решаемой задачи, экономических соображений и необходимости (либо ее отсутствии) компенсации воздействия усилий на корпус объекта. При этом сами блоки (с направленными определенным образом осями гироскопов в нейтральном положении) могут быть разнесены пространственно по вмещающему их корпусу плавающего объекта, а центробежные силы, действующие на корпус и внутренние элементы, могут быть использованы для привода гирогенераторов и организации более эффективного взаимодействия объекта с потоком.
Кроме того, блоки могут быть размещены и произвольно, в этом случае система управления может работать в режиме компенсации силового воздействия гироскопов на корпус регулируя кинетические моменты (скорость и направление вращения) гироскопов и их нейтральные направления, а так же вне режима такой компенсации. В этом случае гироскопам допустимо иметь разные моменты инерции и массу, так как система управления осуществляет адаптацию элементов системы к текущей колебательной ситуации с учетом желаемых пользователем параметров. Сама система управления может быть конфигурирована и как сетевая структура, и как единый центр, что позволит наращивать мощность системы без четкого первоначального плана. И в этом случае так же совершенно не обязательно чтобы гироскопическое влияние на движение объекта или вмещающего карпуса было компенсировано другим гироскопом или гироскопами, так как вся система в целом от такого влияния может выигрывать, в виду того что при этом корпус может взаимодействовать с дополнительными объемами движущейся воды, что приведет к увеличению общего энергетического эффекта. Таким образом, режим оптимума системы в целом становится вопросом совершенства системы управления.
В любом случае реализации часть вырабатываемой силовыми гироскопами энергии направляют на поддержку скорости вращения гироскопов (так как подшипники гироскопов обладают некоторым трением), организуют за счет вырабатываемой энергии питание электроники, управляющей блоками выполненными по заявленному способу, компенсируют прочие энергетические затраты и на внутренние нужды обеспечивающие функционирование изделий выполненных по заявленному способу. При этом не исключается возможность задействовать для обозначенных целей и сторонний бортовой источник энергии, что не является принципиальным для реализации заявленного способа.
Выработанная по заявленному способу электроэнергия (или энергия запасаемая в других видах, например в виде сжатых газов) может быть как использована для бортовых нужд плавающих объектов, оснащенных блоками по предложенному способу, так и передана на берег в сети общего назначения, или передана иному потребителю любым технически приемлемым способом. Так может осуществляться энергоснабжение объектов маломерного флота, организована генерация энергии для различных нужд плавающих объектов различного размера и назначения (в том числе путем утилизации колебаний небольших и малых амплитуд), гидрографических объектов, объектов аквакультурного назначения, различных прибрежных объектов, предприятий и поселений.
Краткое описание изображений
Фиг. 1
1 - Объект.
2 - Колышки.
3 - Растяжка.
4 - Тросик.
5 - Направление потока.
Фиг. 2
1 - Свая.
2 - Круг с канатами.
3 - Объект.
Фиг. 3
1 - Объект.
2 - Канат.
3 - Якорь.
Фиг. 4
1 - Направление потока.
2 - Опора.
3 - Объект.
4 - Точка крепления.
5 - Руль.
6 - Штанга.
Фиг. 5
1 - Направление потока.
2 - Опора.
3 - Объект.
Фиг. 6
Изображен сегментный объект с фрагментом троса.
Фиг. 7
XOY - Система координат.
М - Мгновенный вращающий момент.
Н - Кинетический момент гироскопа.
ω1 - Мгновенная угловая скорость вмещающего корпуса.
α - Мгновенный угол поворота рамы.
1 - Гироскоп.
2 - Рама.
3 - Подшипники.
Фиг. 8
ω - Мгновенные угловые скорости по осям и суммарная.
XYZ - Ортогональная система координат.
Н - кинетический момент гироскопа.
1 - Гироскоп.
2 - Рамка.
3 - Механизм ориентации опоры.
Изобретение относится к области энергетического машиностроения, а именно к способам использования энергии течения рек, морских течений, импульса волн. В способе утилизации переносимых водными средами потоков энергии путем использования гироскопических эффектов для преобразования потока энергии, переносимого водой, используют объекты с низкой динамической устойчивостью, функционирующие как в глубине водного потока, так и на границе сред вода-воздух, как однокорпусные, так и сочлененно-составные, гидродинамические и гидростатические свойства и особенности крепежа которых таковы, что объекты, или их части, совершают под воздействием набегающего потока самоподдерживающиеся колебания. Колебания используют как источник механической энергии для вынужденных прецессионных колебаний одного или нескольких силовых гироскопов (1), размещаемых в составе блока или блоков, оснащенных системой управления, поддерживающей движения гироскопов (1) с заданными скоростью и направлениями и осуществляющей необходимую автоматизацию и адаптацию к режимам колебаний. Развиваемые гироскопом (1), или гироскопами, вращающие моменты преобразуют в электроэнергию или энергию давления газа. Изобретение направлено на повышение генерирования энергии. 8 ил.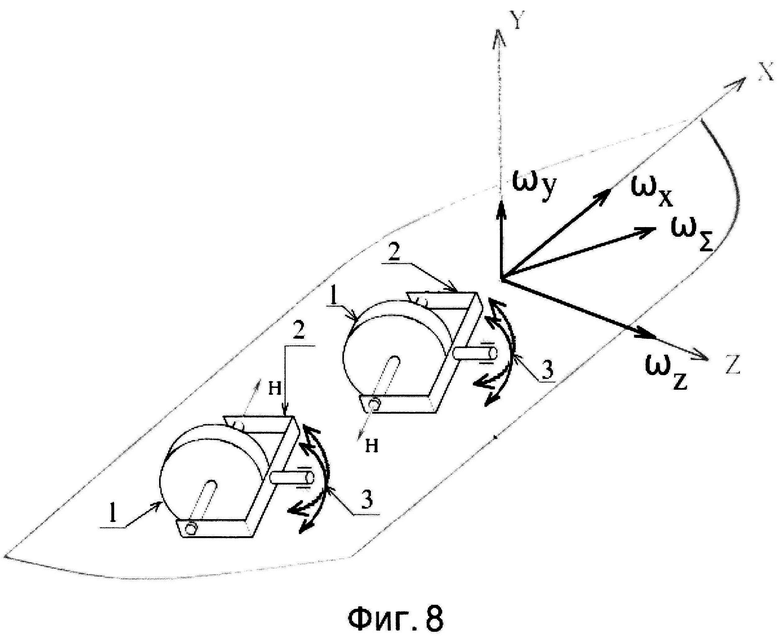
Способ утилизации переносимых водными средами потоков энергии путем использования гироскопических эффектов, отличающийся тем, что для преобразования потока энергии, переносимого водой, используют объекты с низкой динамической устойчивостью, функционирующие как в глубине водного потока, так и на границе сред вода-воздух, как однокорпусные, так и сочлененно-составные, гидродинамические и гидростатические свойства и особенности крепежа которых таковы, что объекты, или их части, совершают под воздействием набегающего потока самоподдерживающиеся колебания, которые используют как источник механической энергии для вынужденных прецессионных колебаний одного или нескольких силовых гироскопов, размещаемых в составе блока или блоков соответственно, которые оснащают системой управления, поддерживающей движения гироскопов с заданными скоростью и направлениями и осуществляющей необходимую автоматизацию и адаптацию к режимам колебаний, развиваемые гироскопом, или гироскопами, вращающие моменты которых преобразуют в электроэнергию или энергию давления газа.
| СУХАЯ ХРОМОГЕННАЯ ПИТАТЕЛЬНАЯ СРЕДА ДЛЯ ОБНАРУЖЕНИЯ КОЛИФОРМНЫХ БАКТЕРИЙ И E.coli (ВАРИАНТЫ) | 2012 |
|
RU2508400C1 |
| Волновая электростанция | 2018 |
|
RU2694712C1 |
| US 4352023 A, 28.09.1982 | |||
| ХОЛОДИЛЬНОЕ МАСЛО И КОМПОЗИЦИЯ РАБОЧЕГО ВЕЩЕСТВА ДЛЯ ХОЛОДИЛЬНОЙ УСТАНОВКИ | 2008 |
|
RU2474601C2 |
| Гироскопический преобразователь энергии морских волн | 2018 |
|
RU2688857C1 |
| US 2014239643 A1, 28.08.2014 | |||
| СУХАЯ ХРОМОГЕННАЯ ПИТАТЕЛЬНАЯ СРЕДА ДЛЯ ОБНАРУЖЕНИЯ КОЛИФОРМНЫХ БАКТЕРИЙ И E.coli (ВАРИАНТЫ) | 2012 |
|
RU2508400C1 |

