Изобретение относится к линейным электроприводам, применяющимся в различных областях техники, таких как транспортное машиностроение, приборостроение, робототехника и других, где требуется линейное перемещение рабочего органа на заданную величину с заданной скоростью при действии известной внешней нагрузки, которую привод должен преодолевать за счет приложения к рабочему органу необходимого усилия.
Известные линейные электроприводы содержат электрический мотор, приводящий через редуктор во вращение ходовой винт, сопряженный с гайкой, соединенной со штоком и зафиксированной от вращения. Таким образом, при вращении электрического мотора ходовой винт вращается, а сопряженная с ним гайка получает линейное перемещение и перемещает соединенный с ней шток. Для повышения коэффициента полезного действия вместо обычной передачи винт-гайка используют шариковинтовую передачу. Например, известен Линейный электропривод (п. РФ №2700562 СТ) содержащий винтовой механизм, включающий ходовой винт, взаимодействующую с ним гайку и выдвижной шток. Винтовой механизм соединен с двигателем таким образом, что вращение его выходного вала вызывает осевое перемещение гайки и выдвижного штока относительно корпуса. Также известен, например, Линейный электропривод, содержащий редукторный двигатель, приводящий во вращение шпиндель с резьбой, причем на шпинделе с резьбой установлена гайка для перемещения толкателя (п. РФ №2419009 СТ).
К недостаткам этих двух приводов следует отнести то, что оба они приводятся во вращение электромоторами, из-за чего их быстродействие определяется временем рассеивания и накопления якорем электромотора кинетической энергии, отсутствие устройств, защищающих электродвигатель от перегрузки в случае остановки штока под действием нерасчетной нагрузки, а также недостаточная степень надежности, вследствие отсутствия резервирования электродвигателя.
Наиболее близким к заявляемому принят линейный электропривод, конструкция которого приведена на http://www.bergab.ru/lmelectro.shtml.
Данный электропривод содержит передачу винт-гайка, устройство вращения ходового винта в виде зубчатой передачи и электродвигатель. При этом двигатель через зубчатую передачу вращает ходовой винт, а сопряженная с ходовым винтом гайка соединена с полым выдвижным штоком. Таким образом, при вращении двигателя, ходовой винт, через зубчатую передачу также получает вращение, за счет чего гайка, зафиксированная от поворота, совершает линейное перемещение вдоль ходового винта, перемещая при этом шток.
Данный линейный электропривод обладает рядом достоинств: он конструктивно прост, развивает большие усилия при малой массе и габаритах, осуществляют фиксацию рабочего органа при изменяющейся нагрузке без применения каких-либо дополнительных устройств (за счет свойства самоторможения передачи винт-гайка), и, при должном выборе параметров, не требует в процессе эксплуатации технического обслуживания. К недостаткам такого линейного электропривода следует отнести значительное время, затрачиваемое на реверс направления движения рабочего органа.
Электрический мотор (особенно коллекторный) с цепями управления, в связи с большим количеством составляющих элементов, часть из которых является силовыми, оказывается самым ненадежным элементом линейного электропривода. Следует отметить, что в случае отказа электрического мотора или цепей управления, при применении самотормозящейся передачи винт-гайка, рабочий орган окажется зафиксирован в положении, имевшемся на момент отказа, что в ряде применений ведет к тяжелым последствиям. При этом нельзя повысить надежность путем установки нескольких линейных электроприводов, работающих параллельно, из-за свойств самоторможения передачи винт-гайка.
Также следует отметить отсутствие в прототипе системы защиты, которая бы предотвращала выход из строя электромотора в случае возникновения ситуации, когда шток привода останавливается под действием нерасчетной нагрузки.
Таким образом существует проблема разработки линейного электропривода, лишенного данных недостатков.
Технический результат - повышение быстродействия линейного электропривода и повышение его надежности.
Предлагается линейный электропривод, содержащий корпус, в теле которого выполнен тороидальный канал, заполненный жидкостью и снабженный как минимум двумя разветвлениями, передачу винт-гайка, в которой зафиксированная от поворота гайка, соединенная с полым выдвижным штоком, сопрягается с ходовым винтом, закрепленным по центру осевой турбины с прямыми лопатками, установленной в тороидальном канале, причем перед турбиной, по ходу перемещения жидкости, размещен направляющий аппарат с прямыми поворотными лопатками, установленными с возможностью изменения угла поворота относительно вектора скорости потока рабочей жидкости с помощью переключающего устройства, при этом в разветвлениях тороидального канала, снабженных обратными клапанами, установлены как минимум два осевых насоса, соединенных с электромоторами, расположенными в корпусе.
Сущность заявляемого решения иллюстрируется ниже приведенными рисунками.
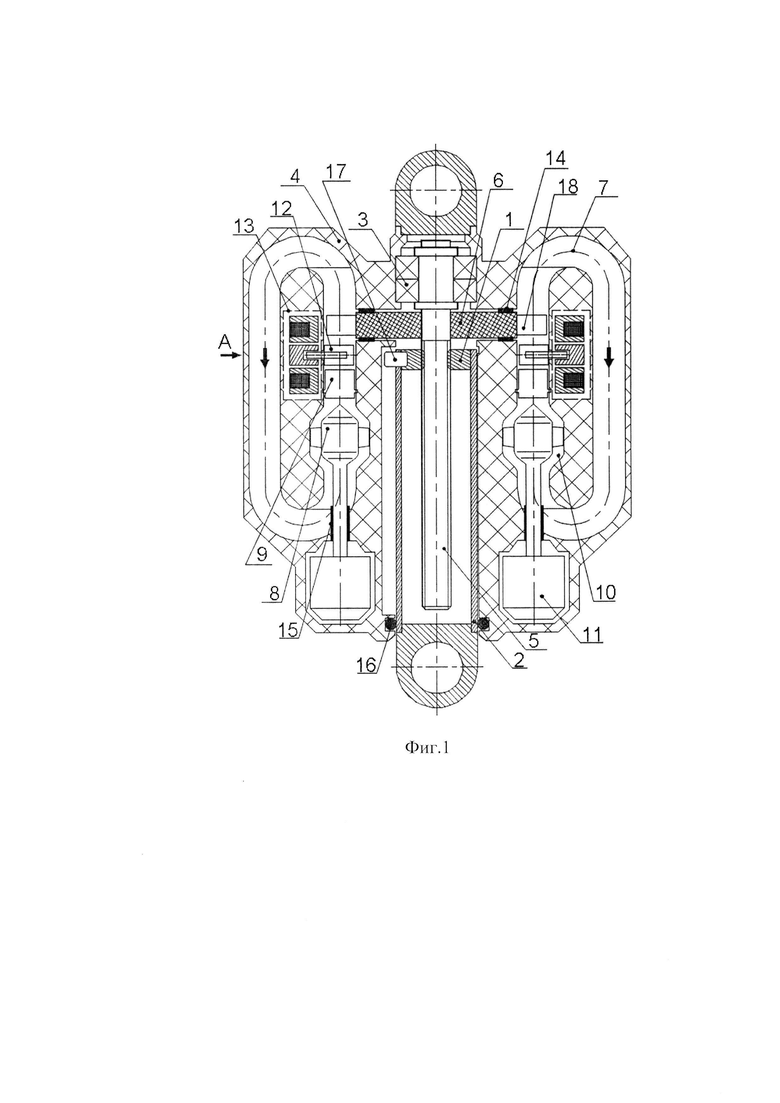
Фиг. 1 приведена схема линейного электропривода, где 1 - ходовая гайка; 2 - шток; 3 - подшипник; 4 - корпус; 5 - ходовой винт; 6 - диск осевой турбины с прямыми лопатками; 7 - тороидальный канал, заполненный рабочей жидкостью, стрелками указано направление движение рабочей жидкости; 8 - осевой насос; 9 - обратный клапан; 10 - разветвление канала; 11 - электромотор; 12 - поворотная лопатка направляющего аппарата; 13 - переключающее устройство; 14 - уплотнение осевой турбины; 15 - уплотнение вала осевого насоса; 16 - уплотнение штока; 17 - стопор; 18 - лопатка осевой турбины.
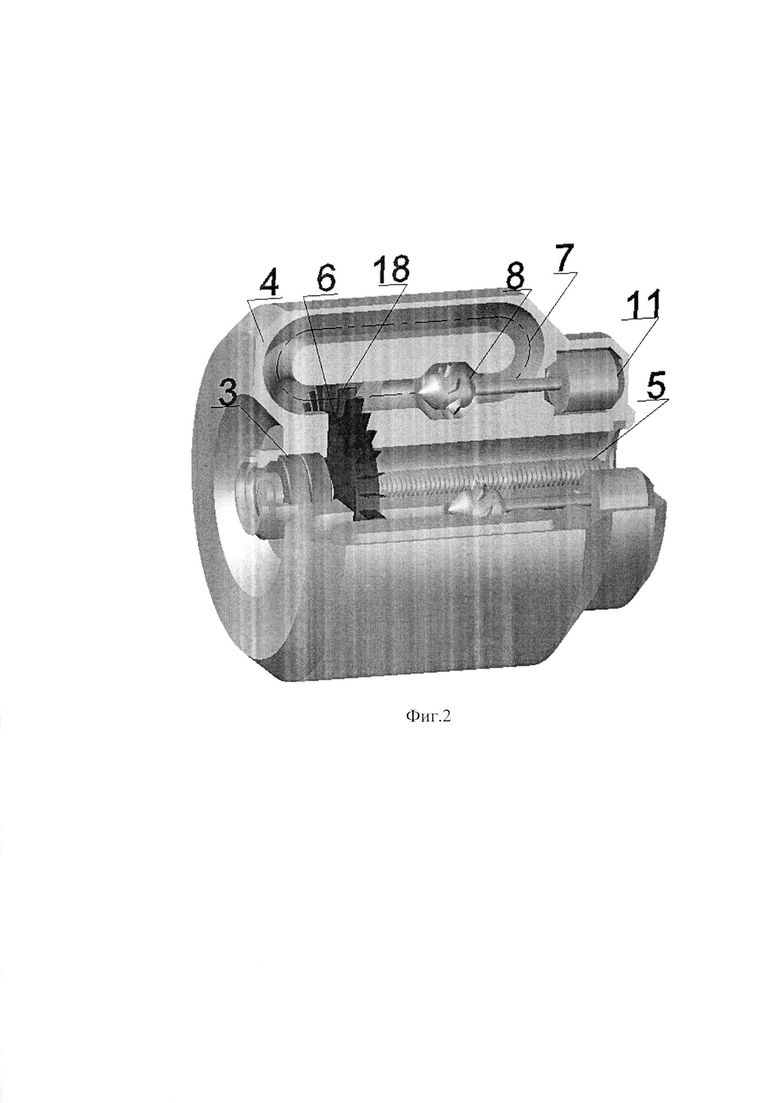
Фиг. 2. Тороидальный канал с разветвлениями в корпусе линейного электропривода.
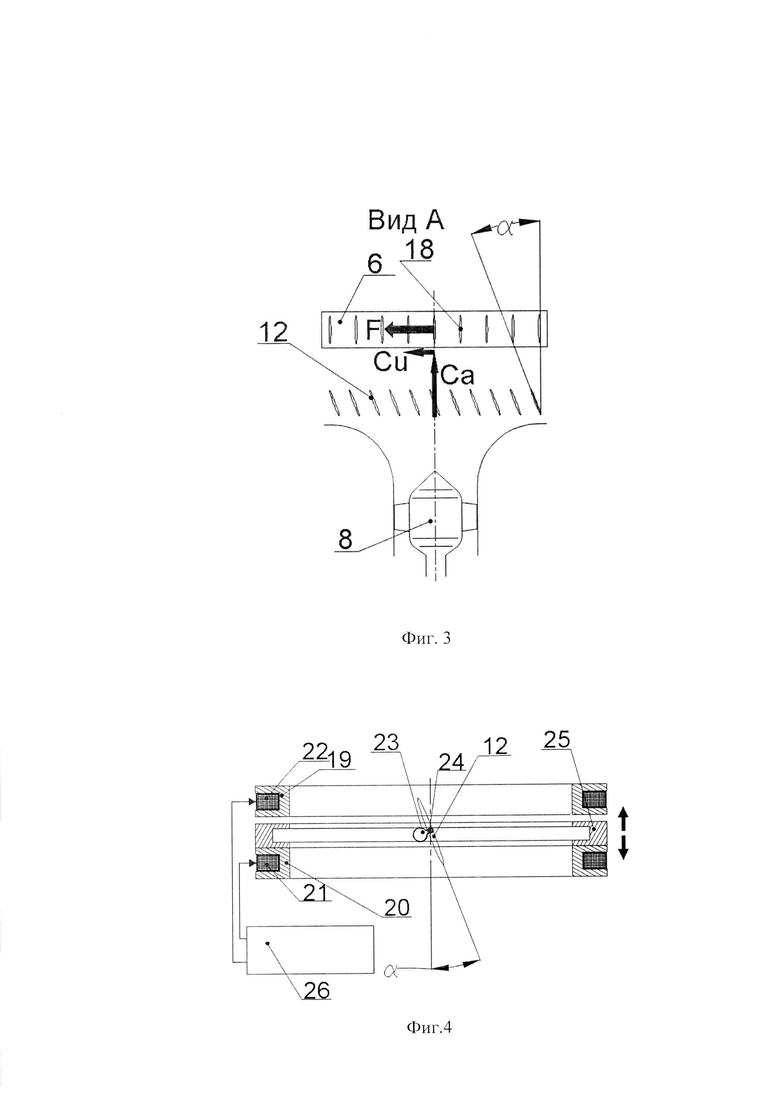
Фиг. 3 Схема взаимодействия потока жидкости в тороидальном канале с лопатками направляющего аппарата и лопатками осевой турбины. Цифрами обозначено: 6 - диск осевой турбины; 8 - осевой насос; 12 - лопатка направляющего аппарата; 18 - лопатка турбины.
Фиг. 4 Схема переключающего устройства, где 12 - лопатка направляющего аппарата; 19 - кольцевой электромагнит; 20 - кольцевой электромагнит; 21 - обмотка электромагнита; 22 - обмотка электромагнита; 23 - кривошип; 24 - ось лопатки направляющего аппарата; 25 - кольцевой якорь, стрелками указаны направления перемещения якоря, 26 - устройство управления.
Устройство (фиг. 1, фиг. 2) содержит ходовую гайку 1, закрепленную внутри полого штока 2, который имеет возможность совершать линейное перемещение относительно корпуса 4 под воздействием осевого усилия, возникающего на ходовой гайке 1, сопряженной с ходовым винтом 5 при вращении последнего вокруг своей оси. Винт 5 вращается в подшипниках 3, которые определяют положение винта относительно корпуса 4 и воспринимают, возникающие вследствие взаимодействия винта 5 с гайкой 1, осевые усилия, передавая их на корпус 4. Предотвращение вращения гайки 1 совместно с винтом 5 осуществляют, например, путем установления стопора 17, представляющего собой штифт, который может линейно перемещаться в пазе корпуса 4, препятствуя, вместе с тем, повороту штока 2 и закрепленной внутри него гайки 1 вокруг своей оси. Для защиты внутренней полости линейного электропривода от воздействий окружающей среды шток 2 загерметизирован в корпусе 4 уплотнением 16, например, в виде резинового кольца. Для соединения с элементами устройства, в составе которого используется предлагаемый линейный электропривод, шток 2 и корпус 4 снабжены наконечниками с отверстиями.
Для приведения во вращение ходового винта 5 применена осевая турбина, в виде диска 6, в центре которого закреплен ходовой винт 5, а на периферии расположены прямые лопатки 18, омываемые потоком рабочей жидкости, движущейся в тороидальном канале 7. Движение жидкости в тороидальном канале 7обусловлено перепадом давления, создаваемым осевыми насосами 8, расположенными в разветвлениях 10 тороидального канала 7. Насосы 8 приводятся во вращение каждый своим электромотором 11, закрепленными в корпусе 4, при этом места входа валов электродвигателей 11 в полость тороидального канала 7 загерметизированы с помощью уплотнений 15, в качестве которых возможно применение, например, магнитных уплотнений, не требующих обслуживания и работающих при высоких угловых скоростях валов. Для предотвращения обратного потока рабочей жидкости через разветвление 10 в случае остановки насоса 8 вследствие отказа электромотора 11 в разветвлениях 10 установлены обратные клапаны 9. Для предотвращения вытекания рабочей жидкости из полости канала в зазоре между корпусом 4 и диском турбины 6 установлены торцовые уплотнения, например, в виде резиновых колец прямоугольного сечения 14. Движущаяся по тороидальному каналу 7 рабочая жидкость проходит вначале через поворотные лопатки направляющего аппарата 12, которые, при необходимости, с помощью переключающего устройства 13, под действием сигналов устройства управления, (фиг. 4, поз.26) могут быть повернуты на угол а по отношению к вектору скорости Са потока жидкости в канале (как показано на фиг. 4). За счет этого, поток жидкости приобретает закрутку, характеризуемую тангенциальной составляющей вектора скорости Cu. При этом поток жидкости набегает на лопатки 18 осевой турбины под углом β (на фиг. 4 не показан), за счет чего на лопатках турбины возникают гидродинамические силы F, создающие на плече R, равном среднему радиусу расположения лопаток 18 на диске 6 турбины вращающий момент, в результате чего турбина приходит во вращение, приводя во вращение закрепленный в диске 6 ходовой винт 5. Переключающее устройство 13, в зависимости от сигналов устройства управления, может придавать углу а различные значения, в частности, угол α может приобретать, например, три значения: α=+ϕ; α=0; α=-ϕ. При этом гидродинамическая сила F также изменяется в диапазоне F=±F, включая F=0, за счет чего ходовой винт может вращаться в разные стороны, или быть остановлен, что, в конечном итоге, позволяет осуществлять управление положением штока 2 относительно корпуса 4.
Переключающее устройство (фиг. 4), обеспечивающее поворот лопаток направляющего аппарата на требуемый угол, выполнено, например, в виде кольцевого якоря 25, представляющего собой кольцо из магнитомягкого материала, например, малоуглеродистого железа, с внутренним кольцевым пазом, внутри которого размещены кривошипы 23, закрепленные на осях 24 поворотных лопаток 12 направляющего аппарата. Кольцевой якорь 25 обладает подвижностью вдоль оси кольцевого канала 7 и может перемещаться в ту или иную сторону под действием магнитного поля, создаваемого кольцевыми электромагнитами 20 и 22, возникающего при подаче тока из устройства управления 26 в обмотки 21 или 22, в зависимости от того, на какую величину угла α (+ϕ или -ϕ) необходимо повернуть лопатки направляющего аппарата 12. Оси 24 поворотных лопаток 12 установлены в поворотных лопатках 12 с упреждением по потоку относительно гидродинамического фокуса поворотных лопаток 12, т.е. оси стоят в лопатках впереди фокуса, если ориентироваться по направлению движения жидкости, для того, чтобы при отсутствии тока в обмотках 21 и 22 электромагнитов 19 и 20, гидродинамические силы, возникающие на поворотных лопатках 12, создавали бы относительно осей 24 моменты гидродинамических сил, поворачивающие поворотные лопатки в положение «по потоку», когда α=0. Таким образом, подавая из устройства управления 26 ток в одну из обмоток 21 или 22 электромагнитов 20 или 19, можно управлять положением якоря 25, который притягивается либо к электромагниту 19, либо к электромагниту 20, заставляя кривошипы 23, размещенные в пазе якоря 25, поворачиваться и поворачивать оси 24 вместе с закрепленными на них поворотными лопатками направляющего аппарата 12 на нужный угол а. При отсутствии тока в обмотках 21 и 22 электромагнитов 19 и 20 поворотные лопатки 12 направляющего аппарата под воздействием гидродинамических сил сами поворачиваются в положение α=0.
Предложенное устройство линейного электропривода позволяет использовать для создания потока рабочей жидкости в кольцевом канале как минимум двух насосов, приводимых во вращение независимыми электромоторами. Однако их количество определяется требуемой степенью надежности и быстродействия устройства. Предложенная система устойчива к одному или нескольким отказам электромоторов, что повышает ее надежность, позволяя, за счет использования электромоторов, большей чем нужно для нормальной работы мощности, сохранить (в случае отказа одного или нескольких электромоторов) расчетные параметры устройства, такие как скорость перемещения штока и преодолеваемая нагрузка. Кроме того, предложенное устройство не вызывает перегрузки используемых электромоторов в случае прекращения перемещения штока при возникновении нерасчетной нагрузки: даже в случае остановки вращения ходового винта и, следовательно, приводящей его во вращение турбины, насосы и электромоторы продолжат вращаться, а выделяющееся при их работе тепло пойдет на нагрев рабочей жидкости и будет рассеяно через стенки канала в окружающую среду.
При использовании в качестве моторов 11, приводящих во вращение насосы 8, коллекторных двигателей, например, RS550S, имеющих частоту вращения n=15000 об/мин, при радиусе Rл концов лопастей насосов 8, например Rл=20 мм, получаем скорость концов лопастей насосов Vк=π*n30*Rл=31.4 м/с. Параметр у, определяющий отношение скорости потока Сн, протекающего через насос, к скорости концов лопастей Vк, согласно [В.М. Черкасский. Насосы. Вентиляторы. Компрессоры. М., «Энергия», 1977, с. 227], может быть выбран в диапазоне ψ=0.4 - 0.8. Приняв среднее ψ=0.6 получим скорость потока Сн в канале насоса Сн=ψ*Vк=18.84 м/с. Конструктивно возможно получить отношение Ω суммарной площади сечения каналов насосов Sн к площади сечения кольцевого канала Sкк, при, например, 4-х насосах, в пределах Ω=0.6-0.8. Принимая среднее Ω=0.7, исходя из соображений неразрывности потока, получим скорость потока в кольцевом канале Са=Ω*Сн=13.188 м/с. Учитывая требование безотрывного обтекания поворотных лопаток направляющего аппарата, можно принять, что максимальное абсолютное значение угла а поворота направляющих поворотных лопаток составляет 12°. Пренебрегая потерями, можно принять, что тангенциальная составляющая скорости потока в кольцевом канале, после прохождения направляющего аппарата, повернутого на угол α, будет Си=Ca*tan(a)=2.8 м/с. Закрученный поток, воздействуя на лопатки 18 осевой турбины, вызовет вращение турбины с угловой скоростью ωт. За счет наличия тангенциальной составляющей скорости потока Cu, лопатки 18 осевой турбины будут обтекаться потоком под углом атаки β, за счет чего на лопатках 18 турбины возникнет гидродинамическая сила, имеющая составляющую, направленную по нормали к хорде лопатки. Данная составляющая гидродинамической силы вызовет вращение осевой турбины с угловой скоростью ют, за счет чего лопатки 18 турбины приобретут линейную скорость Vт, направленную в ту же сторону, что и Cu. За счет наличия линейной скорости Vт угол атаки β лопаток 18 турбины будет уменьшаться, и, в пределе, когда линейная скорость Vт сравняется с тангенциальной скоростью потока Си угол атаки β лопаток 18 турбины окажется равным нулю. В реальности, за счет наличия сил трения при вращении ходового винта 5, сопряженного с ходовой гайкой 1, данное предельное состояние достигнуто быть не может, однако позволяет оценить теоретически возможную максимальную угловую скорость вращения турбины. Пренебрегая потерями и трением, задавая средний радиус лопаток 18 осевой турбины Rлт=50 мм, что приемлемо по конструктивным соображениям, получим теоретическое максимальное значение угловой скорости турбины ωт≈Cu/Rлт=56.06 с-1. В случае вращения ходового винта 5, сопряженного с ходовой гайкой 1, закрепленной в штоке 2, когда к штоку 2 приложена внешняя сила, преодолевая которую шток перемещается, турбина, преодолевая силы трения в паре винт-гайка, будет вращаться с некоторой угловой скоростью, меньшей теоретически рассчитанной максимальной, и чем больше будет внешняя сила, приложенная к штоку, тем с меньшей скоростью будет вращаться турбина, вплоть до полной остановки. При полностью остановленной турбине лопатки 18 турбины будут обтекаться потоком под максимальным углом атаки β и турбина будет развивать максимальный крутящий момент.
Оценим соотношение кинетической энергии, запасаемое вращающимися деталями для предложенного устройства и для линейного электропривода, в котором ходовой винт получает вращение от редуктора, приводимого, в свою очередь от вышеупомянутого электромотора RS550S. Будем считать, что ходовые винты, гайки и штоки в обеих вариантах одинаковые. Энергией, которую запасает ходовой винт и энергией, запасаемой редуктором пренебрежем, исходя из предположения о малости ее значений. Таким образом, в предлагаемом устройстве кинетическую энергию запасает осевая турбина, состоящая из диска 6 с лопатками 18, а в предложенном для сравнения электроприводе кинетическую энергию запасает якорь электромотора RS550S. Из-за большого количества лопаток 18 турбины силы, действующие на каждую лопатку в отдельности невелики, что позволяет использовать для изготовления лопаток 18 и диска 6 использовать материалы малой прочности, например, пластмассы, например поликарбамид, обладающий низкой плотностью (1100 кг/м3). Якорь коллекторного мотора RS550SH изготовлен из железа с обмотками из медной проволоки, и эти материалы обладают большой плотностью (7800 кг/м3 для железа и 8900 кг/м3 для меди). Принимая диаметр якоря равным 0.7 наружного диаметра электромотора RS550SH, равного 38 мм, а длину якоря равной 0.85 длины электромотора RS550SH, что приемлемо по конструктивным соображениям, считая якорь сплошным цилиндрическим телом с плотностью 7800, принимая диаметр диска 6 осевой турбины 88 мм и толщиной 18 мм с 26 лопатками 18, высотой 6 мм и толщиной 2 мм, выполненных из поликарбоната, что приемлемо по конструктивным соображениям, получим отношение θ осевого момента инерции якоря]я и осевого момента инерции осевой турбины Jт
θ=Jя./Jт=4.4
В связи с геометрически сложной формой турбины, представляющей собой диск 6 с лопатками 18, для определения величин Jя и Jт была использована утилита программы autoCAD, определяющая, в том числе, осевые моменты инерции тел относительно оси вращения, с учетом плотности используемых материалов. Принимая теоретически достижимую угловую скорость вращения турбины ωт=56 с-1, угловую скорость якоря мотора RS550SH ωям=π*т/30=1570, получим отношение А угловой скорости якоря мотора RS к угловой скорости осевой турбины

Кинетическая энергия вращающегося тела определяется как Е=J*ω2/2, поэтому отношение Λ кинетической энергии вращающегося якоря мотора RS и кинетической энергии осевой турбины будет

Найденная величина Λ показывает, насколько меньше необходимо затратить времени на раскрутку осевой турбины до своей максимальной угловой скорости сот по сравнению с временем раскрутки якоря коллекторного мотора RS550SH до своей угловой скорости соям, при номинальной для мотора RS550SH подводимой мощности без учета коэффициента полезного действия. Такое же примерно будет и отношение времени выбега якоря к времени выбега осевой турбины. Полученная оценка позволяют сделать вывод о том, что заявленный линейный электропривод будет обладать лучшими характеристиками быстродействия, чем взятый для сравнения линейный электропривод с ходовым винтом, приводимым во вращение через редуктор электромотором, а большая по абсолютному значению величина Λ позволяет сделать вывод о том, что данный вывод о преимуществе заявленного устройства будет справедлив для широкого спектра возможных значений конструктивных параметров (обороты мотора, диаметр диска турбины, скорость потока рабочей жидкости в кольцевом канале и прочих), предложенных к сравнению линейных электроприводов.
| название | год | авторы | номер документа |
|---|---|---|---|
| Лебедка с трансформатором крутящего момента | 2023 |
|
RU2819462C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ НАПРАВЛЯЮЩИМ АППАРАТОМ МАЛОЙ ГИДРОТУРБИНЫ | 1993 |
|
RU2069793C1 |
| Турботрансформатор | 2024 |
|
RU2822350C1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ РОТОРА ЛОПАТОЧНОЙ МАШИНЫ, СТАНОК ДЛЯ ШЛИФОВАНИЯ И УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО КОНТРОЛЯ ПРОФИЛЯ | 1996 |
|
RU2179502C2 |
| УСТРОЙСТВО ДЛЯ ПЕРЕКАЧКИ ОДНОФАЗНЫХ ИЛИ МНОГОФАЗНЫХ ЖИДКОСТЕЙ БЕЗ ИЗМЕНЕНИЯ ИХ СВОЙСТВ | 2000 |
|
RU2266141C2 |
| ТУРБОНАСОСНЫЙ АГРЕГАТ И СПОСОБ ПЕРЕКАЧИВАНИЯ ХОЛОДНОЙ, ГОРЯЧЕЙ И ПРОМЫШЛЕННОЙ ВОДЫ | 2013 |
|
RU2511963C1 |
| ТУРБОНАСОСНЫЙ АГРЕГАТ И СПОСОБ ПЕРЕКАЧИВАНИЯ ХОЛОДНОЙ, ГОРЯЧЕЙ И ПРОМЫШЛЕННОЙ ВОДЫ | 2013 |
|
RU2511983C1 |
| АМФИБИЙНОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2022 |
|
RU2778403C1 |
| ГИДРОВЕТРОСОЛНЕЧНЫЙ ЭНЕРГЕТИЧЕСКИЙ МОДУЛЬ (ВАРИАНТЫ) | 2023 |
|
RU2828657C1 |
| ГИДРАВЛИЧЕСКАЯ МАШИНА | 1997 |
|
RU2177080C2 |
Изобретение относится к линейным электроприводам. Линейный электропривод содержит корпус, в теле которого выполнен тороидальный канал, заполненный жидкостью, передачу винт-гайка, в которой зафиксированная от поворота гайка, соединенная с полым выдвижным штоком, сопрягается с ходовым винтом, закрепленным по центру осевой турбины с прямыми лопатками, установленной в тороидальном канале. Тороидальный канал имеет снабженные обратными клапанами разветвления, в которых установлены осевые насосы с обратными клапанами, соединенные с электромоторами, расположенными в корпусе. Перед турбиной, по ходу перемещения жидкости, размещен направляющий аппарат с прямыми поворотными лопатками, установленными с возможностью изменения угла поворота относительно вектора скорости потока рабочей жидкости. Технический результат - повышение быстродействия линейного электропривода и повышение его надежности. 1 з.п. ф-лы, 4 ил.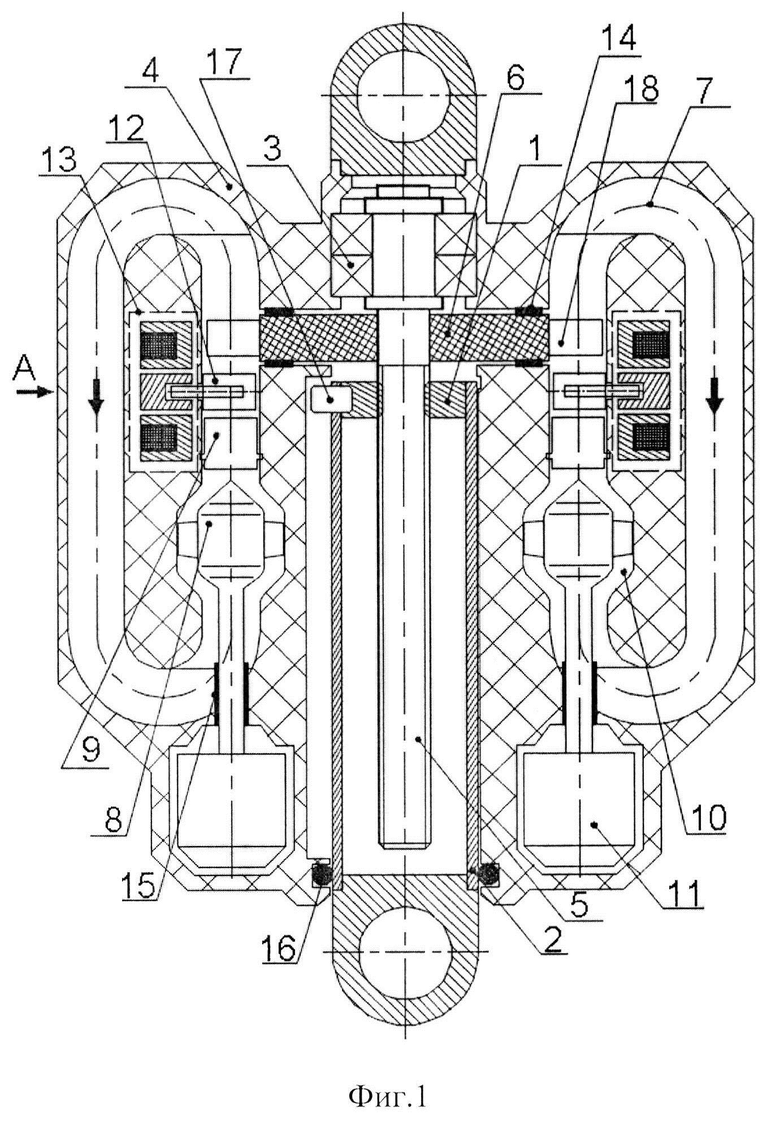
1. Линейный электропривод, содержащий корпус, в теле которого выполнен тороидальный канал, заполненный жидкостью и снабженный как минимум двумя разветвлениями, передачу винт-гайка, в которой зафиксированная от поворота гайка, соединенная с полым выдвижным штоком, сопрягается с ходовым винтом, закрепленным по центру осевой турбины с прямыми лопатками, установленной в тороидальном канале, причем перед турбиной, по ходу перемещения жидкости, размещен направляющий аппарат с прямыми поворотными лопатками, установленными с возможностью изменения угла поворота относительно вектора скорости потока рабочей жидкости с помощью переключающего устройства, при этом в разветвлениях тороидального канала, снабженных обратными клапанами, установлены как минимум два осевых насоса, соединенных с электромоторами, расположенными в корпусе.
2. Линейный электропривод по п. 1, в котором переключающее устройство выполнено в виде подвижного якоря с пазом, перемещающегося под действием сил притяжения кольцевых магнитов и воздействующего на кривошипы лопаток направляющего аппарата.
| ЛИНЕЙНЫЙ ИСПОЛНИТЕЛЬНЫЙ МЕХАНИЗМ, В ЧАСТНОСТИ, ДЛЯ ДИСТАНЦИОННОГО УПРАВЛЕНИЯ РЕГУЛИРУЕМЫМИ КОМПОНЕНТАМИ АЭРОДИНАМИЧЕСКИХ МОДЕЛЕЙ | 2006 |
|
RU2419009C2 |
| ЭЛЕКТРОПРИВОД | 2000 |
|
RU2186451C1 |
| Прибор для эпи-диа- и микропроектирования | 1931 |
|
SU26095A1 |
| WO 2015082199 A1, 11.06.2015. | |||

