Предлагаемое устройство относится к области систем управления распределенными группами роботизированных (автоматизированных) и автономных (автоматических) транспортных средств, решающих задачи транспортной логистики на ограниченных участках территорий или помещениях с большой шириной разъездов.
Многосвязная адаптивная система управления маневрированием группы роботизированных и автономных наземных транспортных средств относится к системам управления сложными распределенными нелинейными объектами в условиях не предсказуемых по времени и характеру возмущений.
Разработанное устройство управления движением группы наземных роботизированных транспортных средств предполагает наличие информационной системы управления для автоматизации процессов формирования маршрутов, эмуляции движения, оптимизации логистики группы транспортных средств и формирования задач как для группы, так и для сепаратных автомобилей.
Роботизированные автомобили предполагают наличие большого количества систем управления высокого уровня, в том числе систем технического зрения, навигации и связи, дистанционного и автономного управления, а также системы принятия решений, которая является центральной среди перечисленных. Формирование маршрутов движения для автономного или роботизированного наземного транспортного средства осуществляется либо извне (оператором транспортного средства), либо вычислителем системы принятия решений при условии наличия на борту продвинутых подсистем цифровых карт, инерциальной навигации высокой точности, дублированных подсистем технического зрения с продвинутым обработчиком для распознавания объектов и их параметров.
В случае автономного транспортного средства обычно выбирается второй способ формирования маршрута, в случае роботизированного - первый.
Вне зависимости от степени автономности транспортного средства любой автомобиль без водителя должен получать задание на движение в виде условно-временной программы выполнения операций или элементарных маневров, которые должны содержать как минимум следующие переменные:
- метка даты и времени;
- текущая координата в формате «широта - долгота - высота»;
- скорость в точке;
- ускорение в точке;
- вектор направления движения в точке;
- условие окончания (останова) движения;
- условие начала (возобновления) движения.
Для каждого маршрута, на выполнение которого назначено роботизированное или автономное транспортное средство, формируется массив значений вышеперечисленных переменных в виде базы данных, загружаемой в систему принятия решений роботизированного или автономного транспортного средства.
Каждое транспортное средство может выполнять в различные моменты времени отдельные маршруты, часто не связанные друг с другом. Во время выполнения маршрута каждое транспортное средство занимает часть дорожного полотна, а в случае роботизированного или автономного транспортного средства нужно учитывать риски несовершенства систем управления и невозможности учета всех факторов возмущений, действующих на автомобиль во время движения по маршруту (выполнения задания).
Таким образом, задачей более высокого уровня управления является формирование множества маршрутов, непротиворечащих друг другу, совокупность которых представляет собой единую систему движения группы роботизированных или автономных транспортных средств для выполнения транспортных задач организации.
Классические системы мониторинга движения транспортных средств организаций представляют собой системы диспетчеризации, которые осуществляют следующие функции:
- отображение статуса и локации транспортного средства и груза;
- отображение параметров транспортного средства;
- обеспечение многоканальной связи с водителем;
- назначение оператором задач на перевозку.
Ключевым элементом данной системы является водитель (оператор) транспортного средства, который является исполнительным элементом системы диспетчеризации и одновременно системой управления для транспортного средства, его знания, опыт и интеллект являются необходимым элементом данной многоуровневой многосвязной системы управления, целью которой является установление коридора возможных значений параметров, главными из которых являются дата, время и место доставки груза потребителю.
В случае применения роботизированных или автономных транспортных средств задача доставки груза или выполнение любой другой транспортной задачи может быть достаточно сильно конкретизирована и уточнена ввиду наличия у оператора или собственника транспортного средства объемного массива информации о локации, статусе и технических и эксплуатационных параметрах транспортного средства, которое неразрывно связано с некоторой подсистемой управления (пультом управления, системой назначения заданий и маршрутов). В этом случае для роботизированного транспортного средства подсистема управления верхнего уровня представляет собой задатчик маршрута движения в виде массива данных с метками даты, времени, скорости, ускорения, вектора направления движения, условий начала и окончания движения, а для автономного транспортного средства - метки даты, времени, локаций начала и окончания движения, условий начала и окончания движения (в этом случае вычислитель системы принятия решений на борту самостоятельно формирует маршрут движения).
Движение группы роботизированных или автономных транспортных средств предполагает выполнение следующих условий:
- отсутствие пересечений маршрутов в близкие моменты времени с учетом рисков беспилотного движения, минимизация рисков останова выполнения комплексной транспортной задачи;
- полное формальное описание задания, пригодное для использования в системе управления роботизированным или автономным транспортным средством, т.е. присутствие интерфейса коммутации систем различных уровней;
- потребность в безопасности движения и отсутствии нарушений процессов организации, которое выражается в требованиях синхронности выполнения транспортных задач;
- потребность в оптимизации реализации логистики (выполнения транспортных задач) по критериям минимизации времени выполнения комплексной задачи, экономии топлива, экономии ресурса транспортных средств.
Современные системы управления движением группы транспортных средств предполагают наличие модулей задания и мониторинга выполнения заданий, при этом не обладают свойствами многосвязных систем (сквозная или целенаправленная передача данных между уровнями управления с целью увеличения скорости реагирования или недопущения разнонаправленной работы подсистем) и адаптивных систем (меняющих структуру и параметры в зависимости от внешних воздействий, изменения условий функционирования или по команде оператора системы). В современных системах отсутствует реализация наблюдателя состояния системы (предназначен для повышения точности управления с помощью восстановления неизмеряемых или ненаблюдаемых параметров или определения параметров возмущений), который может быть использован с целью корректировки параметров движения в реальном времени при изменении внешних условий, задания или наличии внутренних сбоев в системе управления движением группы транспортных средств. Любое изменение в этих системах происходит по команде оператора, при этом каждое транспортное средство необходимо оповестить отдельно, что удлиняет срок непредвиденного останова всей группы транспортных средств для получения заданий, отвечающих описанным выше требованиям.
В качестве одного из аналогов можно рассматривать систему и метод децентрализованного мультиагентного управления навигацией и параметрами беспилотного транспортного средства (патент US 9436187 В2, дата опубликования 15 января 2015 года, авторы - Вильям Дэйл Эброгаст, Валид Барнави, Микаэль Эрик Линд, Блэйк Волл).
Рассматриваемая в патенте система описывает метод управления движением группы автономных транспортных средств на основе системы V2V (автомобиль - автомобиль) на основе подходов мультиагентных систем (каждый объект системы взаимодействует с другим на основе особой системы правил и ограничений) и децентрализованных способов принятия решений (отсутствие центра координации, мониторинга и управления) при их движении на изученной территории. Данная подсистема предполагает наличие набора подходов и правил взаимодействия автономных транспортных средств с набором подсистем для принятия решений в автоматическом режиме без связи с оператором или системой верхнего уровня.
Значительными недостатками рассматриваемой системы являются:
- отсутствие моделеориентированного подхода при управлении, что рождает возможность возникновения внештатных и небезопасных ситуаций;
- отсутствие возможности назначения спектра задач, разнесенных во времени;
- отсутствие механизма наблюдателя состояния для пошагового изменения управления в реальном времени, задача ставится один раз и алгоритм ее решения зависит от непредсказуемой траектории движения одного из транспортных средств группы;
- отсутствие возможности реализации подхода в случае управления группой роботизированных транспортных средств.
Еще одним из аналогов предлагаемой к патентованию разработки можно считать аппаратную систему и метод управления группой пилотных и беспилотных транспортных средств, функционирующих совместно (патент US 6308502, дата опубликования 14 марта 2000 года, автор - Тцугио Судо).
Метод управления группой транспортных средств в рассматриваемой системе базируется на телеметрии с пилотных и беспилотных транспортных средств, информация обрабатывается в едином мониторинговом центре, который выдает предписания пилотным транспортным средствам и корректирует режимы движения беспилотных автомобилей. Сепаратные подсистемы беспилотного автомобиля и водитель пилотного автомобиля получают информационные сообщения, в которых указываются требуемая скорость движения, приоритет на конкретном участке дороги, дальнейшие указания по режимам движения после преодоления потенциальной коллизии.
Очевидными недостатками рассматриваемой системы являются:
- отсутствие подсистемы формирования и мониторинга выполнения транспортных задач для определения приоритета;
- отсутствие возможности адаптивной коррекции маршрутов на более ранних этапах движения, отсутствие учета большого количества факторов, влияющих на дорожную сцену;
- робастность алгоритма работы системы;
- отсутствие модуля эмулятора в контуре системы как наблюдателя состояния с предиктивным планированием ситуации для оценки рисков.
Наиболее близким аналогом к разработанной системе можно считать разработку «Система и сервис группы автономных автомобилей» (патент US 9606539, дата опубликования 28 марта 2017 года, авторы - Тимоти Дэвид Кентли, Джесси Сол Левинсон, Рашад Юсеф Гамара, Габриэль Чарстон Сибли).
Данная система предполагает наличие большого количества сервисов для автономных автомобилей, двигающихся по заданным маршрутам. Система предназначена для комплексной оценки окружающей дорожной сцены с расчетом и прогнозированием рисков, коммуникации максимального количества участников движения, расчета траекторий движения отдельных автомобилей с учетом данных систем автомобиля (техническое зрение, навигация и связь, система принятия решений). В контуре системы функционирует модель логистики, результатом работы которой является предсказание коллизий, а также эмулятор логистики, позволяющий оценить будущие дорожные ситуации.
Несмотря на большое количество схожих признаков, с разработанной и предлагаемой к патентованию системой есть одно ключевое различие - отсутствие модуля формирования заданий и модуля оптимизации маршрутов движения. Запатентованная система работает с уже заранее выбранными маршрутами и не осуществляет управление комплексной логистикой большого парка автомобилей, объединенных в группу для решения единой системы транспортных задач организации любого уровня (предприятие, район, город, регион).
Еще одним очевидным недостатком является обязательное наличие на борту автомобиля в группе системы автономного движения, что не предполагает управления роботизированными автомобилями (отсутствует интерфейс связи с операторами роботов или механизм пошагового формирования массива данных о маршруте).
Авторами предлагается устройство управления движением и маневрированием группы роботизированных и автономных наземных транспортных средств на основе применения многосвязной адаптивной системы управления, включающей в себя микропроцессорный блок визуализации и коммутации и информационную систему расчета последовательности и параметров маневрирования (программы движения) группы транспортных средств, преимуществом которой является наличие в расчетном модуле информационной системы алгоритма адаптивного управления движением группы транспортных средств, заключающегося в корректировке в режиме реального времени программы движения при появлении возмущающих воздействий (погода, внештатные ситуации, потеря работоспособности), а также наличие программного модуля оптимизации программы движения группы транспортных средств по критериям минимизации времени выполнения транспортных задач, минимизации расхода топлива, минимизации использования парка.
Изобретение относится к области систем управления распределенными группами роботизированных (автоматизированных) и автономных (автоматических) транспортных средств, решающих задачи транспортной логистики на ограниченных участках территорий или помещениях с большой шириной разъездов.
Микропроцессорный блок представляет собой аппаратную подсистему, предназначенную для решения задач коммутации клиентской и серверной части системы, идентификации параметров движения автомобиля и сигнализирования об отклонении от программы движения, реализуемой автоматизированным или автоматическим транспортным средством в ходе решения хозяйственных задач.
Информационная подсистема представляет собой совокупность взаимосвязанных приложений, реализующих функцию формирования, распределения и корректирования маршрутов движения отдельных автономных транспортных средств на основе получения заданий от оператора парка транспортных средств, объективного контроля выполнения маршрута (по геолокации и параметрам движения), эмуляции выполнения заданий с точки зрения предотвращения коллизий, оптимизации программ движения как парка, так и отдельных транспортных средств по критериям (по выбору оператора) быстродействия, минимизации использования ресурса топлива, минимизации использования ресурса техники.
Изобретение позволяет в режиме реального времени использовать адаптивные механизмы управления движением группы автономных и роботизированных транспортных средств как сложной многосвязной распределенной нелинейной системы с высокой вероятностью возникновения нештатных и критических ситуаций, связанных с изменениями внешней среды (погода, выход животных на пути следования и пр.) и самого объекта управления (невозможность продолжения движения по объективным причинам - отказ техники, невозможность преодоления препятствия).
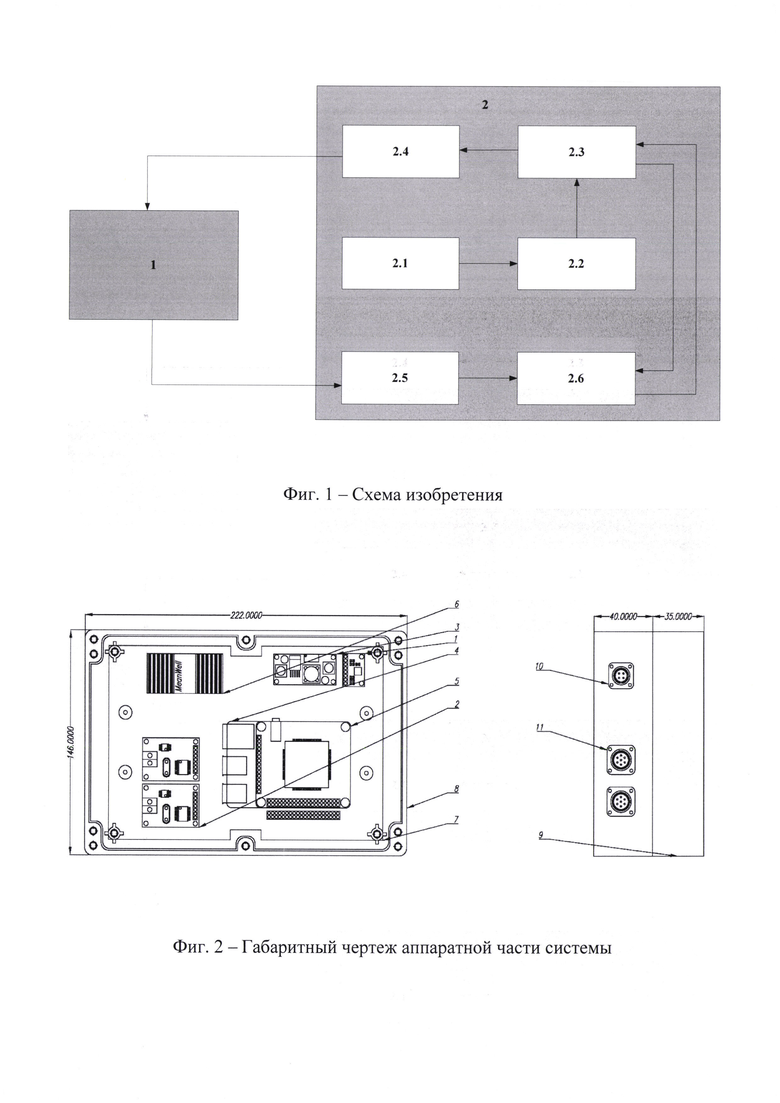
Схема изобретения представлена на фигуре 1.
На фигуре 1 представлены следующие элементы и связи между ними:
1 - Аппаратная часть системы - блок визуализации задания и коммутации с информационной частью системы
2 - Программная часть системы:
2.1 - Модуль формирования заданий;
2.2 - Модуль оптимизации логистики;
2.3 - Модуль эмулятора движения;
2.4 - Модуль формирования программы движения;
2.5 - Модуль мониторинга движения и выполнения программы движения;
2.6 - Модуль эмулятора корректировки движения
Аппаратная часть системы представляет собой локальный компьютер, установленный на борту автономного или роботизированного транспортного средства и предназначенный для коммуникации на физическом уровне (передачи информации).
Локальный контроллер подключен как к системе обмена данными между электронными блоками управления узлами и агрегатами автомобиля (CAN-шине), так и к сети обмена данными системы роботизации или системы автономного движения. Потоковая передача данных с борта транспортного средства включает в себя следующий массив данных:
- дата, время;
- текущая локация в формате «широта-долгота-высота»;
- скорость;
- ускорение;
- вектор направления движения;
- масса груза;
- положение педали акселератора (виртуальной);
- положение педали тормоза (виртуальной);
- положение руля (виртуального);
- текущий маршрут;
- локация старта;
- локация назначения;
- данные о препятствиях на пути следования;
- данные о иных транспортных средствах, распознанных на пути следования;
- данные об окружающей среде.
Потоковая передача данных на борт автомобиля включает в себя следующий массив данных:
- дата, время;
- массив локаций движения в привязке к дате и времени;
- массив условий начала и окончания движения;
- требуемая скорость;
- требуемое ускорение;
- требуемое направление движения;
- сигнал останова / старта.
На фигуре 2 приведен габаритный чертеж аппаратной части системы управления группой транспортных средств.
На фигуре 2 обозначены:
1 - блок акселерометра и гирокомпаса;
2 - CAN-интерфейс;
3 - понижающий преобразователь;
4 - микрокомпьютер;
5 - модуль коммутации;
6 - преобразователь постоянного тока;
7 - печатная плата;
8 - корпус;
9 - крышка корпуса;
10 - разъем питания;
11 - разъем CAN-интерфейса.
На фигуре 3 изображен изготовленный экспериментальный образец аппаратной части системы для борта автомобиля.
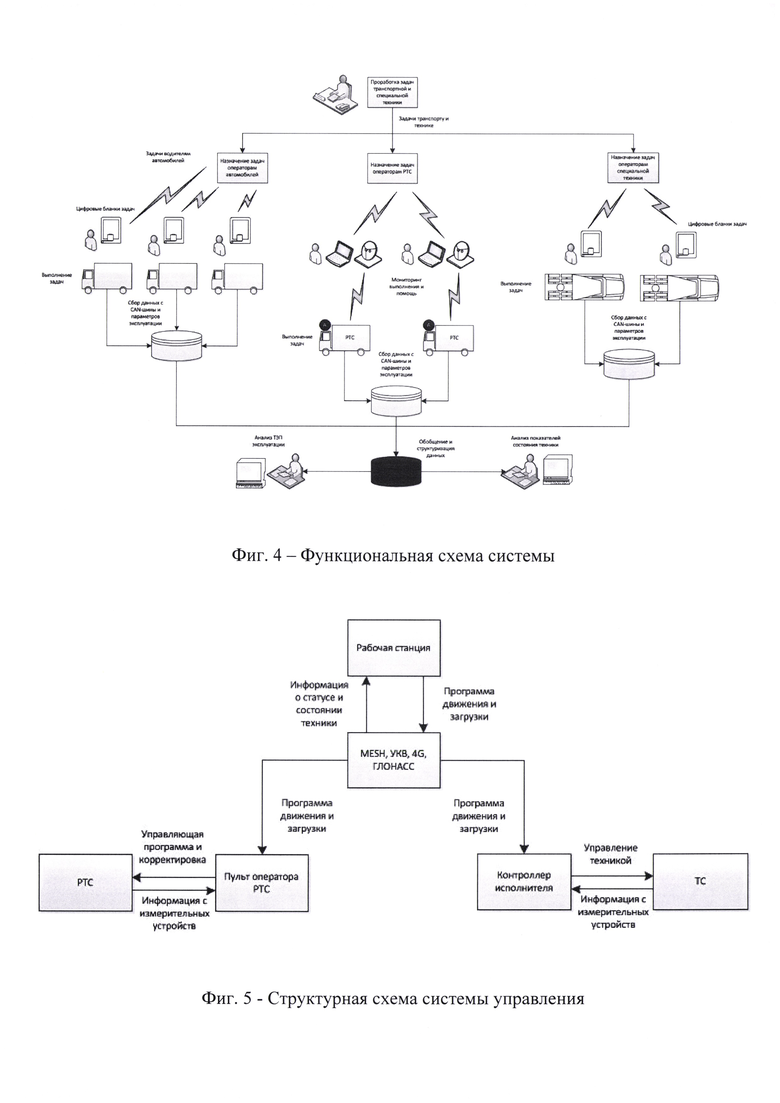
Общая функциональная схема системы приведена на фигуре 4.
Функционал системы предполагает наличие не менее чем 4 уровней управления. 1 уровень отвечает за постановку задач операторам транспортных средств (пилотируемых, роботизированных и автономных), 2 уровень - за обработку и исполнение команд, 3 уровень - за сбор информации о текущем статусе и параметрах транспортных средств, 4 уровень - за обработку информации и ее анализ с целью корректировки изначально заданных целей и способов их достижения.
Структурная схема системы управления приведена на фигуре 5.
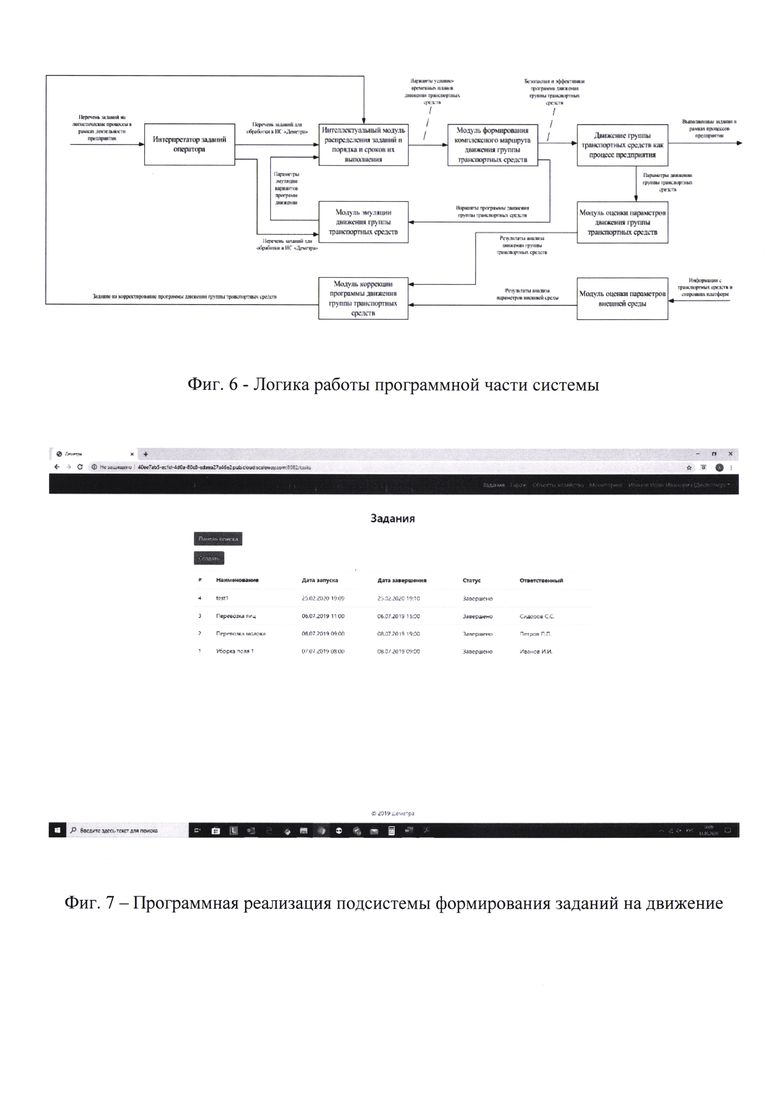
Схема связей системы управления (логика работы программной части системы) приведена на фигуре 6.
Система управления движением группы транспортных средств построена как адаптивная система управления с наблюдателем состояния, роль которого играет модуль эмуляции движения группы транспортных средств.
Логика функционирования системы управления движения группы транспортных средств следующая: при наличии множества заданий на движение транспортных средств оператор системы создает их в системе, указывая тип логистического процесса, нужный вид транспорта, время и дату выполнения задания (интерпретатор заданий оператора), система управления заносит запись в базу данных выполненных заданий и осуществляет проверку выполнимости данного задания в соответствии с наличием ресурсов ее выполнения (интеллектуальный модуль распределения заданий), после этого проверяет возможность осуществления данного маршрута, сравнивая условия и параметры реализации заданного маршрута с уже имеющимися в базе данных (модуль формирования комплексного маршрута) и запускает эмулятор движения группы транспортных средств, где осуществляется проверка выполнимости заданий в той последовательности, которая задана оператором. В случае отсутствия возможности исполнения заданного порядка транспортных процессов, данный контур формирует рассогласования, связанные с невозможностью осуществления операций, и дает задание модулю распределения заданий на формирование новой очередности заданий в соответствии с начальными и граничными условиями и критериями качества и оптимальности выполнения процессов.
При получении оптимального (квазиоптимального) набора последовательных транспортных операций, соответствующего своими параметрами выполнимости и эффективности заданиям оператора, модуль формирования комплексного маршрута формирует программу движения транспортных средств как файл, содержащий параметры координат, скорости движения, типовых маршрутов и маневров, точек синхронизации маршрутов и условий начала и окончания выполнения маршрутов, раздаваемый операторам транспортных средств (водителям или операторам роботизированных шасси специального назначения), и данная программа исполняется транспортными средствами с переходом функционирования системы в режим мониторинга (внешний контур системы).
При движении транспортных средств производится проверка параметров движения группы транспортных средств условиям сформированной программы движения на предмет соблюдения сроков, условий и иных параметров прохождения ключевых точек, точек синхронизации и прочих контрольных условий. В случаях осуществления остановов и аварийных остановов движения хотя бы одного транспортного средства внутренним контуром системы производится проверка возможности движения других транспортных средств посредством проверки их заданий на реализуемость в данных условиях (с подключением эмулятора движения группы транспортных средств).
Помимо контроля непреднамеренных и непредсказуемых остановов и аварийных остановов транспортных средств, система управления производит мониторинг параметров транспортных средств и параметров внешней среды (изменения погоды, изменения в объектах инфраструктуры, изменения в параметрах маршрутов и пр.), которые требуют корректировки условий проверки выполнения заданий на безопасность и эффективность. Этой цели в системе служит модуль коррекции программы движения группы транспортных средств, целью которого является изменение граничных условий формирования маршрутов, таких как изменение средней и моментальной скорости, изменение максимальной загрузки транспортных средств, изменение возможности проезда по отдельным маршрутам. Сформированные ограничения в режиме реального времени передаются в модуль распределения заданий для изменения вариантов выполнения заданий.
2.1 - Модуль формирования заданий;
2.2 - Модуль оптимизации логистики;
2.3 - Модуль эмулятора движения;
2.4 - Модуль формирования программы движения;
2.5 - Модуль мониторинга движения и выполнения программы движения;
2.6 - Модуль эмулятора корректировки движения
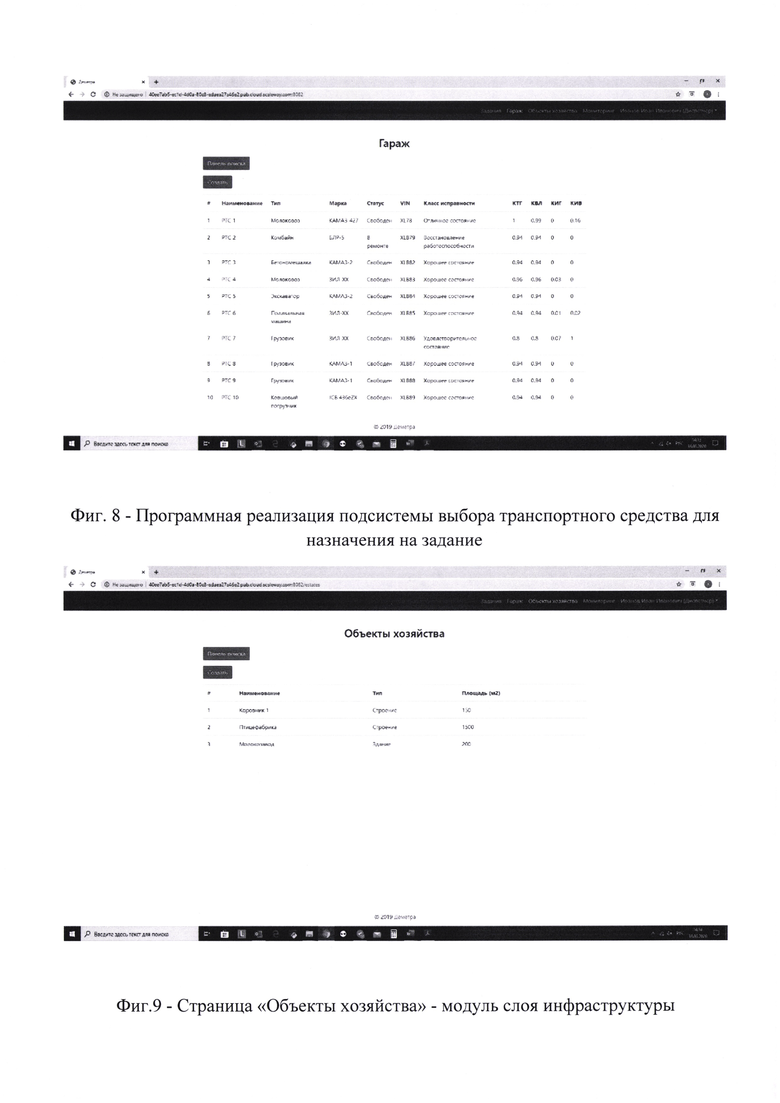
Модуль формирования заданий 2.1 представляет собой программный компонент записи в систему оператором требуемых к выполнению транспортных задач и назначения транспортных средств на эту задачу. Этот компонент состоит их двух подмодулей - системы «Задания» (фигура 7) и системы «Гараж» (фигура 8). Каждые сутки формируется начальный комплексный маршрут движения группы транспортных средств, проходя этапы оптимизации и эмуляции.
Модуль оптимизации логистики предполагает решение нелинейной транспортной задачи с применением методов анализа графов. Формирование графов (вершин и ребер) происходит в подсистеме формирования слоя территории и маршрутов во встроенной ГИС-системе (фигура 9). Для оптимизации маршрутов оператор системы может выбрать 3 варианта критериев оптимизации:
- минимизация времени выполнения массива задач;
- минимизация расхода топлива;
- минимизация использования ресурса транспортных средств.
Модуль эмулятора движения (фигура 10) предполагает исполнение сформированной на предыдущем этапе программы движения как всего парка транспортных средств, назначенных на задания, так и отдельных транспортных средств с визуализацией исполнения задач на карте, расчетом эксплуатационных показателей и отдельных экономических показателей эффективности.
Модуль формирования программы движения предполагает компоновку программы движения как для оператора системы (для мониторинга), так и для отдельных транспортных средств с программируемым интерфейсом для разграничения автономных и роботизированных транспортных средств.
Модуль мониторинга движения и выполнения программы движения предполагает отображение на экране оператора локаций и статусов транспортных средств, аварийных ситуаций, ошибок и значимых событий при движении парка техники. Данный модуль обрабатывает информацию с аппаратной части системы и определяет потребность в корректировке программы движения ввиду условий окружающей среды, возмущений и собственных ошибок транспортных средств или влияния иных технологических процессов.
Модуль эмулятора корректировки движения предполагает выработку решений для нивелирования последствий нарушения условий и времени выполнения задач и предложений для корректировки программы движения.
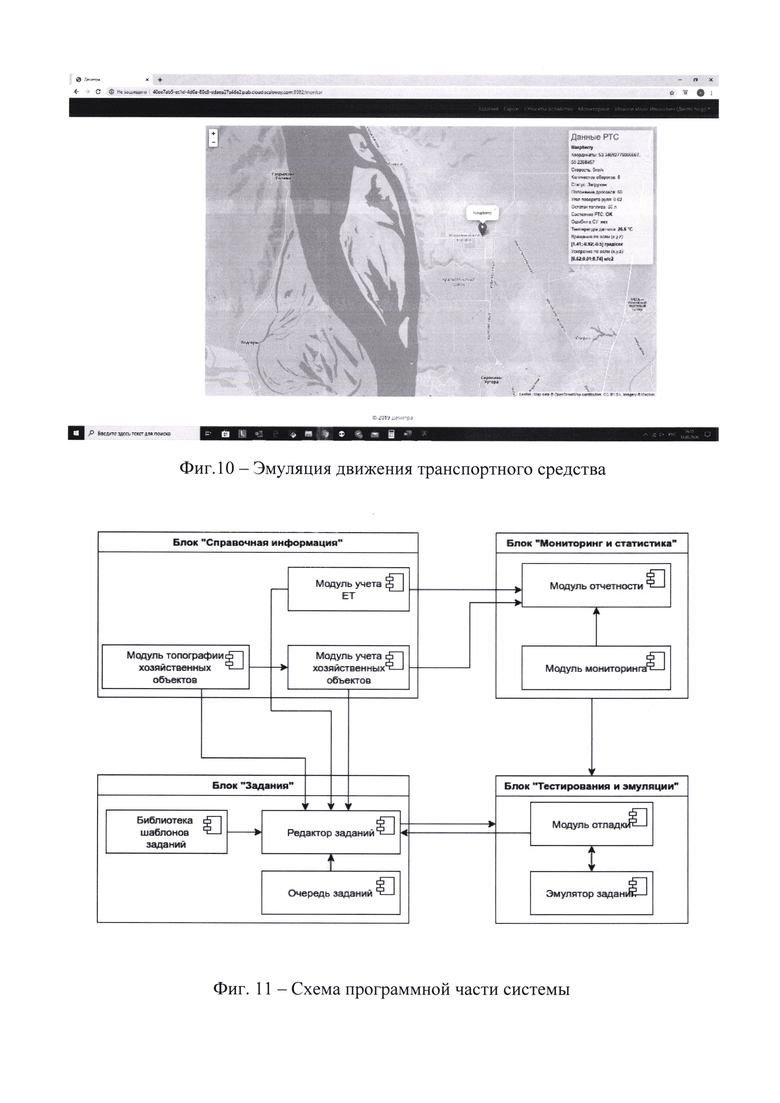
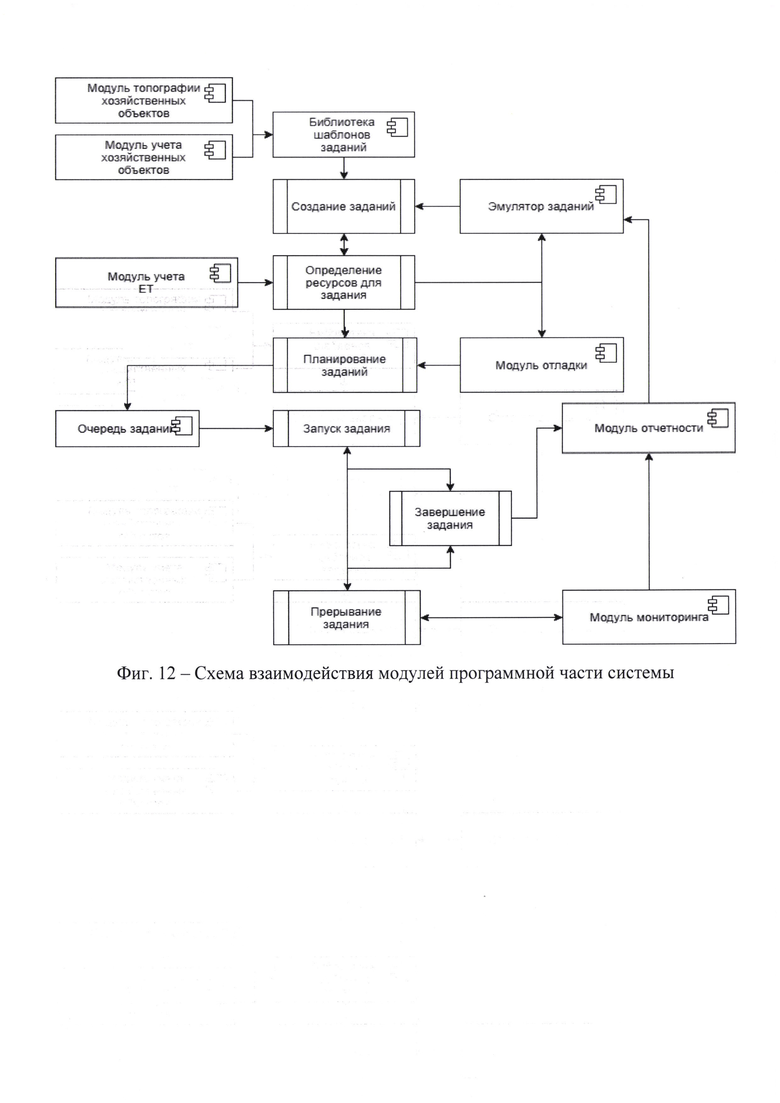
Структура системы обусловлена разделением на логические блоки данных и функций в зависимости от типа объекта, взаимодействие с которым описывается в блоке. Схематически структура системы и функции взаимодействия представлена на фигуре 11. Функциональное взаимодействие модулей структуры представлено на фигуре 12.
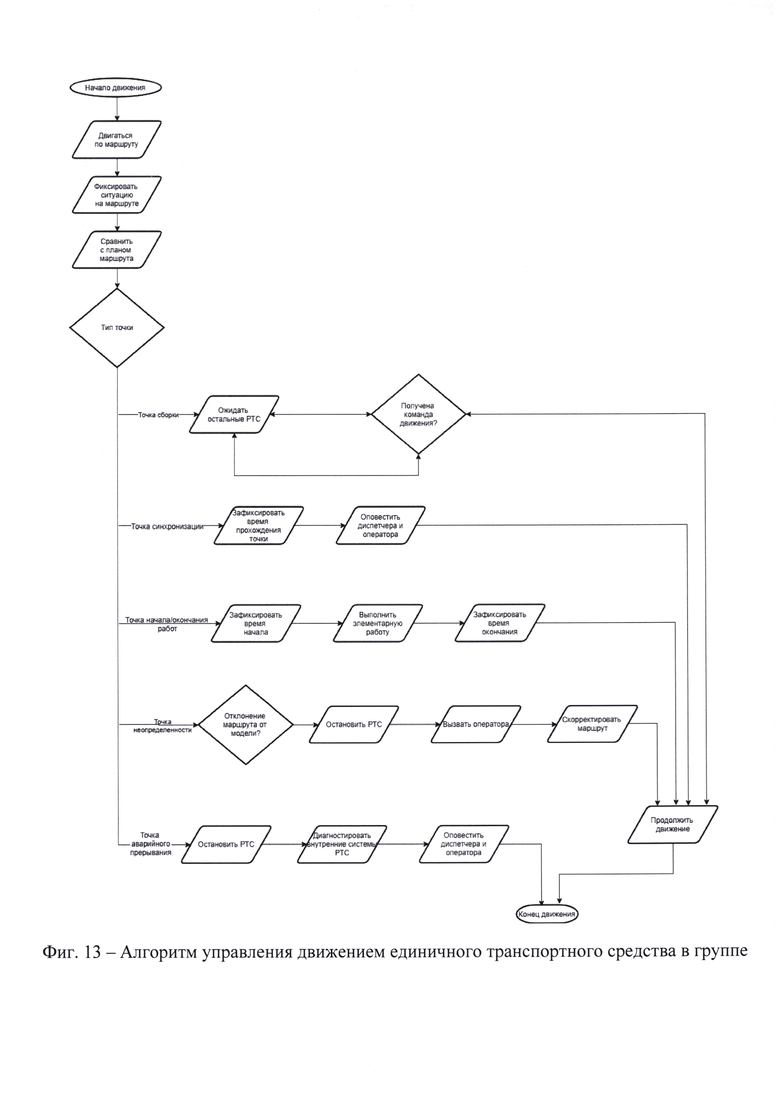
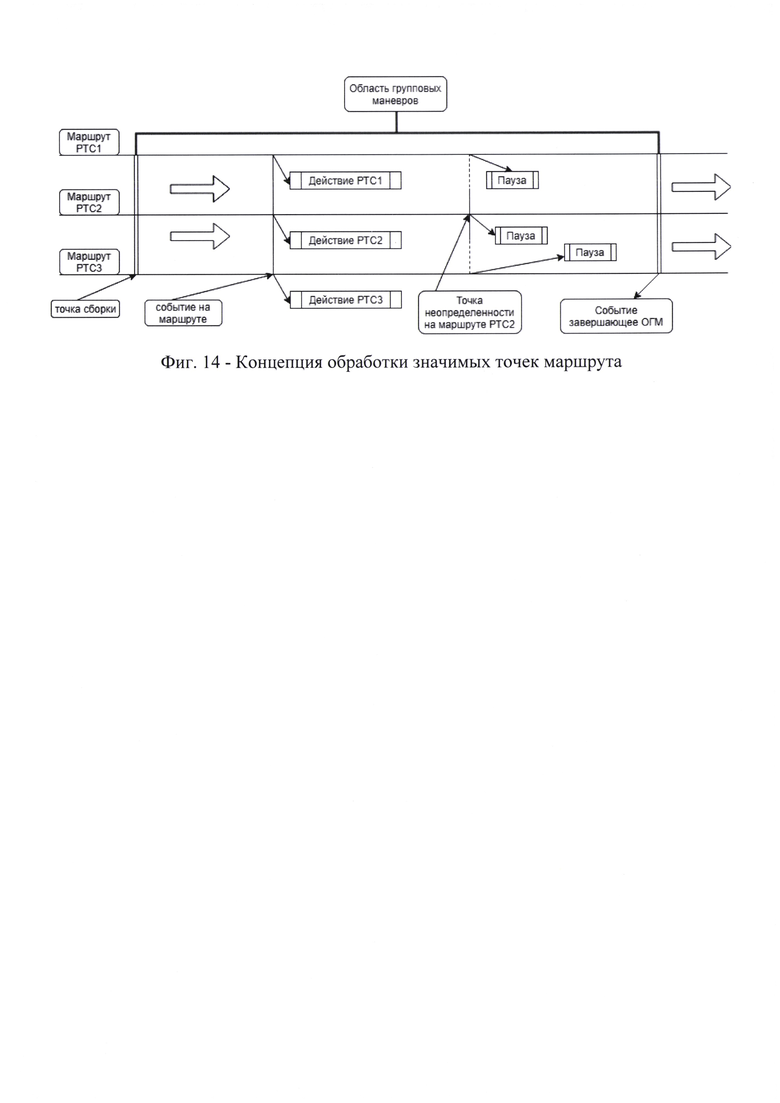
Диспетчер и система мониторинга в полуавтоматическом режиме осуществляют синхронизацию выполнения задания по значимым точкам, которые задаются автоматически или могут быть выставлены диспетчером при формировании задания. Значимые точки маршрута могут быть разных видов в зависимости от способа возникновения и метода прохождения точки (алгоритм представлен на фигуре 13). Концепция обработки значимых точек маршрута приведена на фигуре 14.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ децентрализованного управления распределенной обобщенной сетью, включающей подвижные роботизированные средства и стыковочные станции | 2020 |
|
RU2781391C2 |
| МНОГОФУНКЦИОНАЛЬНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС ОБЕСПЕЧЕНИЯ БОЕВЫХ ДЕЙСТВИЙ | 2013 |
|
RU2533229C2 |
| РОБОТИЗИРОВАННАЯ МОДУЛЬНАЯ ТЕЛЕЖКА | 2023 |
|
RU2800784C1 |
| ПРОГРАММНО-АППАРАТНЫЙ КОМПЛЕКС ПО АВТОМАТИЗАЦИИ СКЛАДСКОЙ ЛОГИСТИКИ ПРЕДПРИЯТИЙ | 2023 |
|
RU2822722C1 |
| Система и способ контроля скорости автомобиля, автомобиль с системой контроля скорости | 2020 |
|
RU2746533C1 |
| Способ построения оптимальной траектории движения сервисных роботов в динамической среде | 2023 |
|
RU2828296C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ТОВАРНОГО ПОТОКА В КРУПНОМ ТОРГОВОМ КОМПЛЕКСЕ, СИСТЕМА УПРАВЛЕНИЯ ТОВАРНЫМ ПОТОКОМ В КРУПНОМ ТОРГОВОМ КОМПЛЕКСЕ | 2004 |
|
RU2251731C1 |
| Система стабилизации безопасной скорости колесного транспортного средства | 2019 |
|
RU2744642C1 |
| Система управления многофункционального робототехнического комплекса обеспечения боевых действий | 2016 |
|
RU2652329C1 |
| Универсальная роботизированная платформа | 2016 |
|
RU2639009C1 |
Изобретение относится к устройству управления движением и маневрированием группы роботизированных и автономных наземных транспортных средств на основе многосвязной адаптивной системы управления. Устройство управления движением и маневрированием группы роботизированных и автономных наземных транспортных средств на основе применения многосвязной адаптивной системы управления, включающей в себя микропроцессорный блок визуализации и коммутации и информационную систему расчета последовательности и параметров маневрирования (программы движения) группы транспортных средств. В расчетном модуле информационной системы содержится алгоритм адаптивного управления движением группы транспортных средств, заключающийся в корректировке в режиме реального времени программы движения при появлении возмущающих воздействий (погода, внештатные ситуации, потеря работоспособности). Также устройство управления содержит программный модуль оптимизации программы движения группы транспортных средств по критериям минимизации времени выполнения транспортных задач, минимизации расхода топлива, минимизации использования парка. Достигается повышение эффективности выполнения транспортных задач. 14 ил.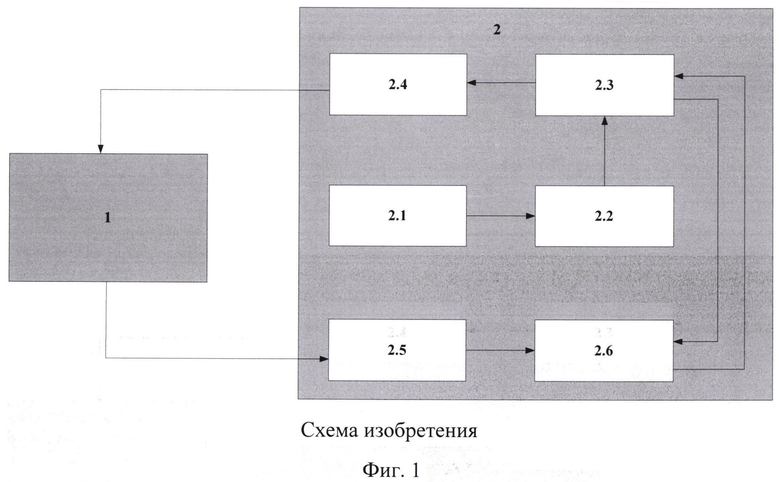
Устройство управления движением и маневрированием группы роботизированных и автономных наземных транспортных средств на основе применения многосвязной адаптивной системы управления, включающей в себя микропроцессорный блок визуализации и коммутации и информационную систему расчета последовательности и параметров маневрирования (программы движения) группы транспортных средств, преимуществом которой является наличие в расчетном модуле информационной системы алгоритма адаптивного управления движением группы транспортных средств, заключающегося в корректировке в режиме реального времени программы движения при появлении возмущающих воздействий (погода, внештатные ситуации, потеря работоспособности), а также наличие программного модуля оптимизации программы движения группы транспортных средств по критериям минимизации времени выполнения транспортных задач, минимизации расхода топлива, минимизации использования парка.
| US 9606539 B1, 28.03.2017 | |||
| US 9650042 B2, 16.05.2017 | |||
| ВЗАИМОДЕЙСТВИЕ МЕЖДУ ТРАНСПОРТНЫМИ СРЕДСТВАМИ ДЛЯ УПОРЯДОЧИВАНИЯ ДОРОЖНОГО ДВИЖЕНИЯ | 2017 |
|
RU2674744C1 |

