Изобретение относится к методам управления в технических роботизированных распределенных системах, включающих объекты двух разных типов, между парами разнородных объектов каждой такой системы должно устанавливаться и производиться взаимодействие, с той или иной периодичностью, для того чтобы достигнуть цели функционирования этой системы.
В работе [1 - A Distributed Framework for Energy Trading Between UAVs and Charging Stations for Critical Applications)), Vikas Hassija, Vinay Chamola, Dara Nanda Gopala Krishna and Mohsen Guizani, Fellow IEEE, 2020], рассматривается диалоговая модель взаимодействия станции подзарядки с БПЛА группы, позволяющая обеспечить балансировку предложения и спроса на электроэнергию, а также безопасную и надежную покупку БПЛА энергии у станции.
В работе [2 - «Energy-controlled Optimization Algorithm for Rechargeable Unmanned Aerial Vehicle Network)), Li Li,Jie Wu,Yixiang Xu, Jun Che, Jin Liang, 2017], решается задача максимизации времени функционирования каждого БПЛА группы на основе решения соответствующей задачи коммивояжера.
Рассматриваемые в статьях [1-2] модели взаимодействия БПЛА группы со станциями подзарядки не учитывают локальные факторы, влияющие на эффективность выполнения БПЛА своих задач и вызванные подготовкой к взаимодействиям с отдельными станциями и самими этими взаимодействиями; не учитывают эволюцию этих факторов во времени. Кроме того, эти модели исходят из неограниченного запаса энергии на каждой станции, что может иметь место только при подключении таких станций к централизованной энергосети. Это есть существенное ограничение таких моделей, исключающих рассмотрение станций подзарядки на основе возобновляемых источников энергии.
Работы [1-2] будем считать аналогами.
Из известных технических решений наиболее близким по технической сущности к заявляемому способу является «MULTI-USE UAV DOCKING STATION SYSTEMIS AND METHODS)) (патент US 9387928B1, опубл. 12.07.2016). В этом патенте рассмотрен обобщенный централизованный метод управления функционированием группой подвижных автономных объектов разной природы для реализации таких задач, как перевозка грузов, подзарядка и ремонт на станциях обслуживания и т.п., с учетом обратной связи от датчиков, измеряющих текущие значения пространственного поля величин, характеризующих среду функционирования группы мобильных роботов.
В этом патенте раскрыты системы и способы обеспечения взаимодействия многоцелевых стыковочных станций с подвижными роботизированными средствами (ПРС). Док-станции могут быть объединены в сеть с центральным пультом управления и множеством ПРС. Док-станции могут включать в себя ряд услуг, облегчающих наведение и обслуживание ПРС. Док-станции могут включать оборудование для обработки доставляемых грузов/ посылок и могут выполнять функции как конечного пункта назначения, так и узла доставки. Док-станции могут расширить площадь действия ПРС, предоставив последним возможность подзарядки / дозаправки. В случае ПРС с электрическими движителями подзарядка может быть контактной или безконтактной.
Док-станции могут включать в себя средства навигации для направления беспилотных летательных аппаратов к стыковочным станциям и предоставления маршрутной информации от центрального пульта управления. Эти станции могут быть снабжены специальным измерительным оборудованием для оценивания текущих характеристик состояний ПРС, в частности, беспилотных летательных аппаратов (БПЛА), самой станции, окружающей среды в окрестности станции (например, метеорологическое оборудование).
Док-станции могут быть встроены в существующие конструкции, такие как вышки сотовой связи, осветительные и электрические опоры, а также здания. Док-станции могут также включать автономные конструкции для предоставления дополнительных услуг в недостаточно обслуживаемых районах.
Основой заявляемого в прототипе метода планирования траекторий движения каждого ПРС группы и управления взаимодействием ПРС с док-станциями является централизованное принятие решений оператором на основе: а) целей и задач функционирования группы ПРС; б) текущих данных, приходящих с измерительной аппаратуры станций и, возможно, каждого ПРС группы; в) прочих данных, приходящих от других источников и связанных с текущим или будущим процессами функционирования группы ПРС и док-станций.
Недостатками способа, заявленного в прототипе, являются: 1) отсутствие возможности децентрализованного управления в системе, что существенно ограничивает область применимости метода этого патента. Степень этого ограничения растет с увеличением числа элементов системы, количества потенциально возможных режимов их функционирования и площади зоны ее действия. Кроме того, надежность функционирования всей системы и вероятность успешного выполнения миссии снижаются из-за значительного риска выхода из строя центра управления при отсутствии резервирования его функций. 2) отсутствие возможности использования накопленной информации о предыдущих состояниях системы для оптимизации процесса последующих взаимодействий подвижных и неподвижных объектов системы по заданному критерию ее функционирования, т.е. отсутствие самообучаемости системы для лучшего решения поставленных перед нею задач на основе накопленного ею опыта в прошлом.
Полностью централизованное управление такой системой оправдано в тех случаях или тех режимах, когда требуется контроль оператора, координирующего действия всех элементов системы на верхнем уровне ее управления. Однако с ростом числа элементов группы и повышением сложности учета всего комплекса процессов, определяющего функционирование этой группы, более приоритетным решением становится сочетание централизованного и децентрализованного методов управления. В комплекс проблем децентрализованного управления такой группой входит задача организации оптимального взаимодействия ее элементов с целью достижения группой определенной цели своего функционирования.
В случае организации энергетического обмена между подвижными мобильными объектами системы и ее стационарными элементами - станциями подзарядки, решение этой задачи играет ключевую роль в разработке концепции оптимального энергопотребления указанной группы.
Технический результат заявляемого способа. Техническим результатом предлагаемого изобретения является повышение эффективности автономного функционирования группы подвижных роботизированных средств, в частности, снижение вероятности выходов из строя ее элементов, уменьшение времени выполнения миссии каждым элементом группы и группой в целом, снижение участия оператора или централизованного звена управления в координации действий группы, рост эффективности решения типовых задач с ростом времени самообучения системы, в том числе за счет адаптивной корректировки конфигурации статических элементов системы или/ режимов функционирования ПРС, возможность функционирования группы ПРС в условиях ограниченных энергетических ресурсов станций подзарядки.
Этот результат опирается на концепцию децентрализованного взаимодействия подвижных и стационарных объектов некоторой технической системы, подразумевающую возможность выбора каждым агентом потенциального взаимодействия соответствующего компаньона; базисом такого выбора является учет предыстории процесса, когда для принятия решения - выбора объекта для взаимодействия, используется как текущая информация о этих объектах на данный момент времени, так и оцененные результаты ранее сделанных выборов, показавших свою соответствующую эффективность в отношении некоторого целевого критерия.
Интеграция заявляемого способа с методами планирования и управления движением каждого подвижного роботизированного средства, а также методами управления функционированием каждой станции, обеспечивает автономное выполнение миссии группой ПРС с достижением заданного целевого качества этого выполнения при заданных ограничениях.
Технический результат достигается тем, что заявляемый способ осуществляет децентрализованное управление распределенной обобщенной сетью, включающей подвижные роботизированные средства и стыковочные станции, в котором каждый элемент сети оборудуют модулем для организации приема и передачи информационных сигналов, вычислительным модулем для автономного анализа и принятия решений о взаимодействии с другими элементами сети, датчиками для измерения характерных собственных величин или величин внешней среды, подвижные роботизированные средства дополнительно оборудуют навигационными модулями и специальными автопилотами, модулями полезной нагрузки, эти средства осуществляют автономное, либо дистанционно управляемое движение между пунктами назначения, включая этапы стыковки и посадки на специально оборудованные площадки стыковочных станций, в котором изначальные маршруты следования каждого подвижного робототехнического средства, а также моменты, когда элементам сети требуется существенная корректировка режимов их функционирования, ремонтное обслуживание или вывод их из строя, определяются оператором или автоматизированным командным звеном на основе цели и задач функционирования всей системы. Предлагаемый способ реализует децентрализованное регулирование взаимодействий между каждой парой, включающей подвижное роботизированное средство и стыковочную станцию, решение о потенциально возможном взаимодействии между каждой такой парой основано на выборах, производимых обоими ее элементами или одним из них, с возможностью использования накопленной информации о предыдущих взаимодействиях для оптимизации процесса последующих взаимодействий подвижных роботизированных средств и стыковочных станций по заданным критериям функционирования сети, в котором допускается принудительное подключение оператора или автоматизированного командного звена в контур управления. На основании результатов функционирования распределенной обобщенной сети становится возможным адаптивно корректировать конфигурации стыковочных станций и режимы функционирования подвижных робототехнических средств для оптимизации процесса функционирования сети по заданных критериям качества.
Проведенный анализ технических решений позволил установить, что аналоги, характеризующиеся совокупностью признаков, тождественных всем признакам заявленного технического решения, отсутствуют в известных носителях информации, что указывает на соответствие заявленного способа условию патентоспособности "новизна".
Поиск известных решений в данной и смежных областях техники с целью выявления заявляемого набора отличительных от прототипа признаков, показал отсутствие как явной формулировки таких признаков, так и каких-либо технических решений, где бы указанный набор признаков был реализован полностью.
Проведенный анализ настоящего уровня техники не позволил вынести заключение о том, что влияние предусматриваемых существенными признаками заявленного изобретения преобразований на достижение указанного технического результата известно. Следовательно, заявленное изобретение соответствует условию патентоспособности "изобретательский уровень".
Заявляемый способ применим к адаптивному управлению процессом функционирования обобщенной двусвязной технической системы - распределенной обобщенной сети (РОС), включающей статическую распределенную подсеть (СРП) и динамическую распределенную подсеть (ДРП). СРП включает в себя стационарные объекты (называемые нами далее стыковочными станциями или просто станциями), выполняющие те или иные функции сопровождения движения и/или обслуживания подвижных роботизированных средств, входящих в ДРП.
Этот способ позволяет проводить оптимизацию управления процессов функционирования РОС по заданным критериям: а) максимальная автономность функционирования/ минимальное участие оператора в контуре управления и обслуживании элементов РОС; б) критерий по быстродействию выполнения миссии; в) минимальный процент выходов из строя элементов системы; г) минимизация дисбалансов в энергетическом и информационном взаимодействиях между элементами РОС.
Кроме того, заявляемый способ позволяет проводить апостериорную корректировку конфигурации статических элементов системы и режимов функционирования динамических ее элементов - ПРС, с целью достижения заданного критерия качества.
Ключевым процессом функционирования РОС является взаимодействие между ее элементами для выполнения поставленных задач или достижения определенной цели. Например, целью функционирования могут быть: а) организация грузопотока между рядом пунктов приема/выдачи товаров; б) организация мониторинга местности; в) картографирование; г) проведение спасательной операции; д) проведение боевой операции на определенной территории; е) проведение операции обезвреживания/ разминирования и т.п.; ж) прочее.
Взаимодействие между элементами РОС может включать: информационный обмен; погрузку-выгрузку комплектующих, перевозимых ПРС, на станции; энергетический обмен между элементом СРП и ПРС, как правило, сводящийся к подзарядке ПРС на станции; прочее.
Стационарными объектами могут быть станции, выполняющие одну или несколько из следующих функций: а) погрузка -выгрузка товаров/грузов, перевозимых ПРС; б) восполнение энергетических потерь отдельных ПРС -подзарядка за счет централизованного подвода электроэнергии или выработки энергии той или иной природы с помощью возобновляемых источников; в) ремонт ПРС; г) прочее. Эти станции могут быть дополнительно снабжены измерительной аппаратурой, в общем случае фиксирующей текущие характеристики состояний ПРС, самой станции, окружающей среды в окрестности станции (например, с помощью метеостанции). Объекты СРП кроме док-станций могут включать различное приемо-передающее оборудование с соответствующим блоком управления, которое обеспечивает генерацию, прием, передачу или ретрансляцию сигналов какой-либо природы (радио-, оптических, акустических и проч. сигналов) для обмена информацией между всеми или частью элементов распределенной обобщенной сети.
Подвижными роботизированными средствами могут быть: а) БПЛА; б) автономные роботизированные катера; в) автономные роботизированные подводные аппараты; г) автономные роботизированные воздухоплавательные платформы.
Вариантом реализации РОС является распределенная обобщенная энергетическая сеть (РОЭС), кроме того, РОС может являться РОЭС и выполнять дополнительные функции обслуживания ПРС.
Важным частным случаем РОЭС является распределенная сеть, включающая станции подзарядки ПРС и группу ПРС; задачей функционирования такой сети является выполнение заданной миссии группой ПРС с возможностью осуществления подзарядки энергией на станциях сети.
Заявляемый способ совместно с методами планирования и управления движением каждого ПРС, а также методами управления функционированием каждой станции подзарядки, обеспечивает автономное выполнение миссии группой ПРС с минимизацией времени этого выполнения при заданных ограничениях по проценту выходов из строя элементов РОС.
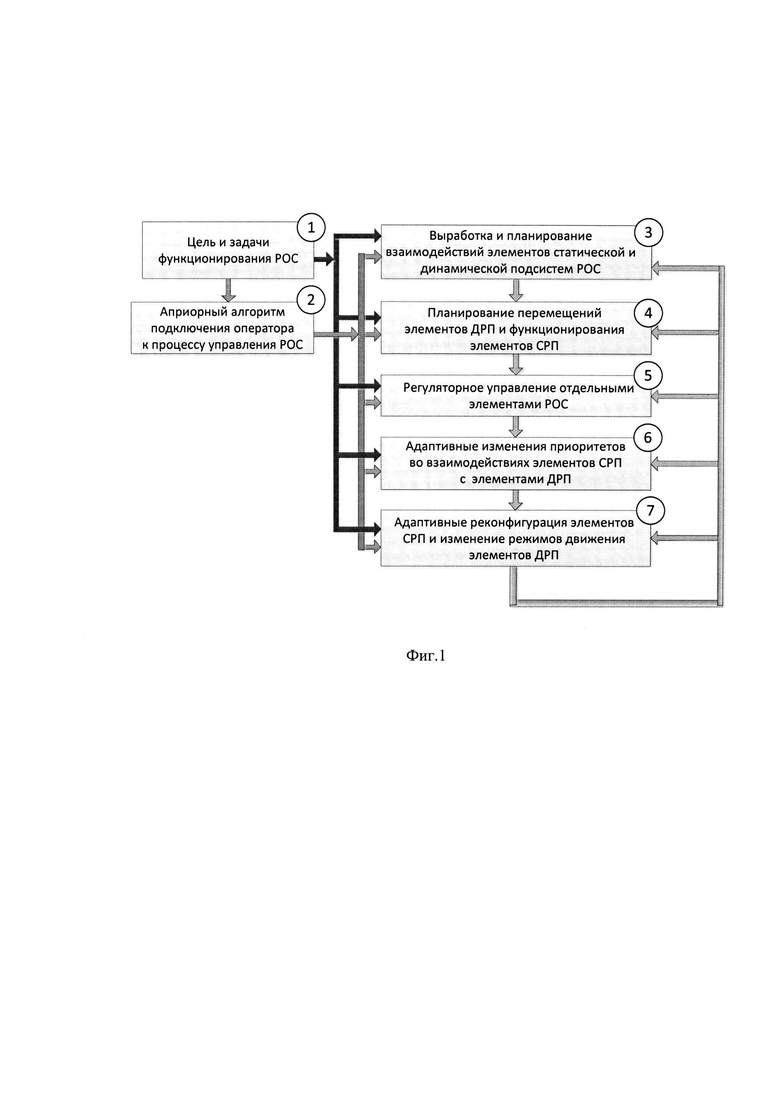
Заявляемый способ реализуется в системе управления распределенной обобщенной сетью, включающей подвижные роботизированные средства и стыковочные станции, функциональная схема которой представлена на Фиг. 1.
Перед началом функционирования распределенной обобщенной сети производится формирование цели и выработка задач соответствующей миссии в блоке 1, далее устанавливается правило, по которому оператор или/ автоматизированное централизованное командное звено может вмешиваться в процесс управления РОС на каждом или некоторых из этапов этого управления. В одном предельном случае только оператор имеет право принимать решения на всех этапах - получается режим централизованного управления, в другом - влияние оператора/ централизованного звена полностью исключено, по крайней мере, до окончания миссии. В общем случае оператор/ централизованное звено могут вмешиваться в процесс с той или иной периодичностью.
Затем в блоке 3 производится планирование взаимодействия пар элементов СРП и ДРП, на основании нижеприведенного алгоритма (фиг. 2), в блоке 4 производится планирование перемещений ПРС и функционирования станций, обеспечивающих, без учета случайных и априори неопределенных возмущений внутри системы, реализацию карты запланированных взаимодействий, намеченных в блоке 3. Блок 5 обеспечивает регуляторное управление низкого уровня для каждого из элементов РОС, обеспечивающего минимально возможное отклонение реальных траекторий движения элементов в фазовых пространствах своих переменных состояния от соответствующих программных траекторий, заложенных в блоке 4. Реализация самообучения, приобретения «опыта» элементами РОС в отношении критериев наилучшего выполнения вмененных им задач, обеспечена блоком 6, где происходит корректировка весовых коэффициентов - параметров алгоритма децентрализованного выбора взаимодействующих гетерогенных элементов РОС. В случае, когда возможно или целесообразно изменять конфигурацию, взаиморасположение элементов СРП или установочные величины каждой из станций, а также подстраивать характерные режимы движения ПРС для оптимизации заданных критериев качества РОС, используется блок 7; результаты таких изменений произведенных в блоке 7 по некоторому адаптивному алгоритму, корректируют последовательную работу блоков 3-6; однако включение блока 7 может осуществляться не чаще, чем через интервал времени, необходимый и достаточный для накопления соответствующей информации о функционировании РОС в предыдущей конфигурации и с предыдущими значениями установочных величин ее элементов.
Пусть на определенной территории имеется совокупность фиксированных пунктов назначения, приема-выдачи товара и/или станций подзарядки и т.п., между которыми осуществляется транспортная связь с помощью подвижных роботизированных объектов.
Взаимодействие с частью станций может быть запланирована заранее для ПРС, а возможность взаимодействия с остальными станциями в общем случае определяется по заявляемому способу. При этом объекты динамической/статической распределенной подсистемы будем относить к классу  , а объекты противоположной статической/динамической подсистемы - к классу
, а объекты противоположной статической/динамической подсистемы - к классу  .
.
В процессе движения ПРС может воспользоваться услугами одной из станций, расположенных на означенной территории. Аналогичным образом, станции могут также выбирать отдельные ПРС для взаимодействия на основании доступной им информации с учетом накопленного опыта.
В общем случае, для принятия решения о взаимодействии данной пары необходимо и достаточно выполнение жесткого условия, чтобы каждый из элементов этой пары выбрал противоположный элемент этой пары, таким образом, как это заложено в заявляемом способе. Также возможен случай, когда решение о взаимодействии могут принимать только объекты одного из классов - СРП или ДРП.
Введем понятие относительной эффективности объекта  класса
класса  для объекта
для объекта  класса
класса  в текущей ситуации с номером s, когда системе управления
в текущей ситуации с номером s, когда системе управления  требуется принять решение о взаимодействии с некоторым объектом противоположного класса в отношении реализации некоторой задачи или достижения цели функционирования отдельных ПРС или распределенной динамической подсети в целом. Такие задачи мы будем называть базовыми; ими могут быть: 1. подзарядка отдельных ПРО в процессе движения по произвольным или регулярным траекториям; 2. организация обмена товарами/грузами между ПРО и пунктами отправки назначения; 3. прочие задачи. Каждая базовая задача индуцирует соответствующую относительную эффективность данного объекта одного класса по отношению к некоторому другому объекту противоположного класса при их возможных взаимодействиях в данный момент времени.
требуется принять решение о взаимодействии с некоторым объектом противоположного класса в отношении реализации некоторой задачи или достижения цели функционирования отдельных ПРС или распределенной динамической подсети в целом. Такие задачи мы будем называть базовыми; ими могут быть: 1. подзарядка отдельных ПРО в процессе движения по произвольным или регулярным траекториям; 2. организация обмена товарами/грузами между ПРО и пунктами отправки назначения; 3. прочие задачи. Каждая базовая задача индуцирует соответствующую относительную эффективность данного объекта одного класса по отношению к некоторому другому объекту противоположного класса при их возможных взаимодействиях в данный момент времени.
Пусть  функционал, количественно выражающий относительную эффективность потенциально возможного взаимодействия
функционал, количественно выражающий относительную эффективность потенциально возможного взаимодействия  р-го объекта класса
р-го объекта класса  с q-м объектом класса
с q-м объектом класса  на шаге sp в отношении данной базовой задачи, решаемой р-м объектом класса
на шаге sp в отношении данной базовой задачи, решаемой р-м объектом класса  пусть, далее,
пусть, далее,  - функционал, количественно выражающий относительную эффективность того же взаимодействия, но в отношении базовой задачи, решаемой q-м объекта класса
- функционал, количественно выражающий относительную эффективность того же взаимодействия, но в отношении базовой задачи, решаемой q-м объекта класса  на шаге sq, причем шаги sp и sq относятся к одному и тому же времени.
на шаге sq, причем шаги sp и sq относятся к одному и тому же времени.
Эти функционалы должны учитывать: во-первых, текущую ситуацию, накладывающую пространственно-временные, информационные, энергетические и проч. ограничения на возможность взаимодействия  и
и  ; во-вторых, накопленный к настоящему времени опыт взаимодействия
; во-вторых, накопленный к настоящему времени опыт взаимодействия  со объектами класса
со объектами класса  и
и  с объектами класса
с объектами класса  Возможен вариант, когда, например, каждому объекту
Возможен вариант, когда, например, каждому объекту  становится доступен аналогичный предыдущий опыт всех других объектов класса
становится доступен аналогичный предыдущий опыт всех других объектов класса
Рассмотрим факторы, влияющие на значение функционала  Эти факторы будем называть частичными. Ими могут быть: 1. степень энергоемкости станции для данного ПРС в данной ситуации, выражаемая как разность между заявленной станцией энергией, потенциально доступной для данного ПРС, и энергетическим запросом самого ПРС с учетом движения его до этой станции; 2. затраты дополнительного времени на достижение станции, последующую зарядку и процесс возврата на целевую траекторию, выражаемые как реальное время подзарядки плюс время достижения самой станции; 3. точность оценивания времени движения до ПРС, определяющаяся в том числе особенностями расположения инфраструктуры и влияния природных факторов в малой окрестности станции, может быть выражена как разность между оцениваемым и реальным временем по п. 2; 4. возможность технического обслуживания данной станцией данного ПРС; 5. возможность принятия груза, перевозимого данным ПРС на данной станции; 6. прочие факторы и соответствующие величины.
Эти факторы будем называть частичными. Ими могут быть: 1. степень энергоемкости станции для данного ПРС в данной ситуации, выражаемая как разность между заявленной станцией энергией, потенциально доступной для данного ПРС, и энергетическим запросом самого ПРС с учетом движения его до этой станции; 2. затраты дополнительного времени на достижение станции, последующую зарядку и процесс возврата на целевую траекторию, выражаемые как реальное время подзарядки плюс время достижения самой станции; 3. точность оценивания времени движения до ПРС, определяющаяся в том числе особенностями расположения инфраструктуры и влияния природных факторов в малой окрестности станции, может быть выражена как разность между оцениваемым и реальным временем по п. 2; 4. возможность технического обслуживания данной станцией данного ПРС; 5. возможность принятия груза, перевозимого данным ПРС на данной станции; 6. прочие факторы и соответствующие величины.
Каждому k-му частичному фактору  поставим в соответствие частичный функционал
поставим в соответствие частичный функционал  , зависящий от а) вектора Xpq(s) всех учитываемых величин, влияющих на эффективность взаимодействия
, зависящий от а) вектора Xpq(s) всех учитываемых величин, влияющих на эффективность взаимодействия  и могущих быть измеренными р-м объектом класса
и могущих быть измеренными р-м объектом класса  б) вектора
б) вектора  всех учитываемых величин, влияющих на эффективность взаимодействия
всех учитываемых величин, влияющих на эффективность взаимодействия  и могущих быть измеренными q-м объектом класса
и могущих быть измеренными q-м объектом класса  Для оценки такого функционала, произведенной р-м объектом класса
Для оценки такого функционала, произведенной р-м объектом класса  априорно, до взаимодействия с q-м объектом класса
априорно, до взаимодействия с q-м объектом класса  можно записать:
можно записать:

Основой заявляемого способа является представление функционала  в следующем общем виде:
в следующем общем виде:

Здесь

- K × 1 -вектор оценок всех частичных функционалов  , определенных по (1) на основании измерений
, определенных по (1) на основании измерений  и
и 

- 1×K - вектор весовых коэффициентов, зависящий от массива размерности sp×K значений функционалов  на всех предыдущих этапах взаимодействий
на всех предыдущих этапах взаимодействий  с объектами класса
с объектами класса  определенных на основании измеренных векторов
определенных на основании измеренных векторов  , и интегрирующий в себе информацию об эффективности влияния каждого k-го фактора на результат этих взаимодействий
, и интегрирующий в себе информацию об эффективности влияния каждого k-го фактора на результат этих взаимодействий  в прошлом. Значениями векторов
в прошлом. Значениями векторов  и
и  элементы противоположных классов должны обмениваться через соответствующий информационный канал для корректного выбора подходящего объекта для взаимодействия.
элементы противоположных классов должны обмениваться через соответствующий информационный канал для корректного выбора подходящего объекта для взаимодействия.
Выражения для функционала  получаются из соответствующих равенств (2)-(4) заменами
получаются из соответствующих равенств (2)-(4) заменами  в том числе в нижних индексах.
в том числе в нижних индексах.
Функции многих переменных F и f определяются особенностями РОС и выполняемыми ею задачами.
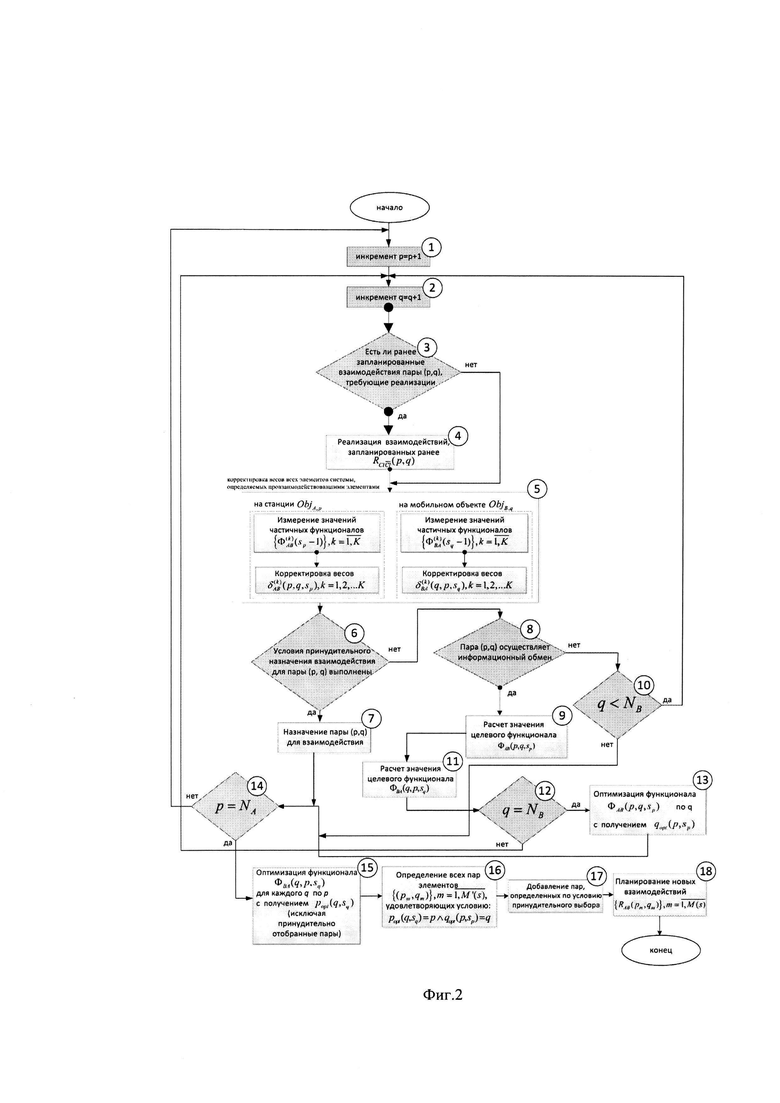
Отличительной части заявляемого способа соответствует алгоритм децентрализованного регулирования взаимодействий между каждой парой подвижных и неподвижных объектов сети, обобщенная блок-схема которого представлена на Фиг. 2; этот алгоритм реализуется в бортовых вычислителях всех или некоторых элементов распределенной обобщенной сети. Положим для определенности 
На Фиг. 2 введены следующие обозначения: 1 - инкрементирование номера элемента пары на первой позиции; 2 - инкрементирование номера элемента пары на второй позиции; 3 - проверка условия: «есть ли на данный момент времени пары, взаимодействие между которыми требуется реализовать?»; 4 - реализация ранее запланированных взаимодействий; 5 - корректировка весов всех элементов системы, определяемых провзаимодействовавшими элементами; 6 - проверка условий принудительного назначения взаимодействия данной пары; 7 - принудительное назначение пары для взаимодействия; 8 - осуществление информационного обмена между элементами пары; 9 - Проверка условия: «текущий номер элемента пары на второй позиции меньше общего числа элементов второго класса (В)»; 10 - расчет значения целевого функционала, определяемого элементом на первой позиции; 11-расчет значения целевого функционала, определяемого элементом на второй позиции; 12- проверка условия: «номер элемента на второй позиции равно общему числу элементов второго класса (В)»; 13 - оптимизация функционала для элемента на первой позиции с получением номера соответствующего оптимального элемента на второй позиции (второго класса); 14 - проверка условия: «номер элемента на первой позиции равен общему числу элементов первого класса (А)»; 15 -оптимизация функционалов для каждого элемента на второй позиции с получением номеров соответствующих оптимальных элементов на первых позициях (класса А); 16 - определение всех пар элементов, удовлетворяющих перекрестному критерию оптимального выбора; 17 - добавление пар, определенных по условию принудительного выбора; 18 - планирование взаимодействий выбранных пар.
Логика алгоритма, соответствующего блок-схеме на Фиг. 2, следующая. После инкрементирования номера обоих элементов пары (блоки 1 и 2) в блоках 3 и 4 производится проверка существования пар, взаимодействие между элементами которых подлежит реализации на данном временном шаге процессорного времени бортовых вычислителей (времена бортовых вычислителей различных элементов РОС идут синхронно) и реализация этого взаимодействия; на основании результатов этих взаимодействий в блоке 5 измеряются значения всех частичных функционалов (1) а затем - рассчитываются по (4) обновленные значения весов δ для объектов р и q:  и
и  реализация принудительного, производимого оператором назначения пар, подлежащих взаимодействию, производится в блоках 6 и 7 (если таковое назначение имеет место). Если после этого не достигается последний элемент первого класса А, т.е. не выполнено условие p=NA блока 14, то происходит возврат к пункту инкрементирования номера р, иначе - производятся действия, описываемые далее. Если условие блока 6 не выполнено, тогда в блоке 8 проверяется условие возможности осуществления информационного обмена парой (р, q); если такой обмен не возможен, то производится переход к следующему элементу через блоки 10 и 14 проверок условий q<NB и p=NA, или же - переход к этапу обработки данных после циклов (блок 15 и следующие). Если указанный обмен возможен, то он производится, и по его результатам рассчитываются функционалы ФАВ(р,q,sp) и ФBA(q,p,sq) в блоках 9 и 11. Если далее выполнено условие q=NB блока 12, то в блоке 13 производится оптимизация функционала ФАВ(р,q,sp) q с получением оптимального элемента qopt для данного р; затем, после проверки условия блока 14, происходит переход к следующему номеру р, либо к блоку 15 оптимизации функционала ФBA(q,p,sq) по р с получением оптимального элемента popt для данного q, исключая принудительно отобранные пары. На основании результатов работы блоков 13 и 15 в блоке 16 производится отбор всех пар
реализация принудительного, производимого оператором назначения пар, подлежащих взаимодействию, производится в блоках 6 и 7 (если таковое назначение имеет место). Если после этого не достигается последний элемент первого класса А, т.е. не выполнено условие p=NA блока 14, то происходит возврат к пункту инкрементирования номера р, иначе - производятся действия, описываемые далее. Если условие блока 6 не выполнено, тогда в блоке 8 проверяется условие возможности осуществления информационного обмена парой (р, q); если такой обмен не возможен, то производится переход к следующему элементу через блоки 10 и 14 проверок условий q<NB и p=NA, или же - переход к этапу обработки данных после циклов (блок 15 и следующие). Если указанный обмен возможен, то он производится, и по его результатам рассчитываются функционалы ФАВ(р,q,sp) и ФBA(q,p,sq) в блоках 9 и 11. Если далее выполнено условие q=NB блока 12, то в блоке 13 производится оптимизация функционала ФАВ(р,q,sp) q с получением оптимального элемента qopt для данного р; затем, после проверки условия блока 14, происходит переход к следующему номеру р, либо к блоку 15 оптимизации функционала ФBA(q,p,sq) по р с получением оптимального элемента popt для данного q, исключая принудительно отобранные пары. На основании результатов работы блоков 13 и 15 в блоке 16 производится отбор всех пар  удовлетворяющих условию: popt(q,sq)=p^qopt(p,sp)=q (в количестве М' штук, если М'=0, такие пары отсутствуют). Наконец, в блоке 17 происходит добавление принудительно отобранных пар с формированием полного множества пар (pm,qm),
удовлетворяющих условию: popt(q,sq)=p^qopt(p,sp)=q (в количестве М' штук, если М'=0, такие пары отсутствуют). Наконец, в блоке 17 происходит добавление принудительно отобранных пар с формированием полного множества пар (pm,qm),  , взаимодействие элементов которых планируется в блоке 18. На данном временном шаге может оказаться М=0.
, взаимодействие элементов которых планируется в блоке 18. На данном временном шаге может оказаться М=0.
Алгоритмы, подразумевающие возможность выбора только для объектов одного класса А или В, могут быть получены из рассмотренного алгоритма. Если элементам класса В запрещено выбирать наиболее подходящих для взаимодействия элементы класса А, тогда из блок-схемы на Фиг. 2, следует исключить блоки, связанные с расчетом и оптимизацией функционалов типа ФBA(q,p,sq), а также соответствующие весовые коэффициенты и частичные функционалы не рассчитываются; аналогично, если элементам класса А вменяется такой запрет, тогда, наоборот, из блок-схемы на Фиг. 2, следует исключить блоки, связанные с расчетом и оптимизацией функционалов типа ФАВ(р,q,sp), соответствующие весовые коэффициенты и частичные функционалы также не рассчитываются.
Рассмотрим конкретизацию заявляемого способа применительно к РОС, содержащей станции для подзарядки БПЛА. Пусть для РОС группа БПЛА есть ДСП, а СРП представляет собой совокупность станций, с которыми каждый БПЛА может стыковаться - тем или иным образом для выполнения задач РОС, причем каждая станция может быть снабжена модулем автоматической подзарядки БПЛА. В качестве базовой задачи, которую должна реализовать РОС, определим организацию оптимального по быстродействию транспортного потока между пунктами назначения - самими станциями. Будем считать, что группа БПЛА однородна; часть станций снабжена модулями подзарядки (МП) БПЛА, а другая часть - нет.
Каждый БПЛА, как только его энергетический запас снижается менее порогового значения, может приземлиться на одной из станций, снабженных МП, на другие станции БПЛА может приземляться, чтобы доставить либо забрать для перевозки груз; возможен случай, когда станция назначения используется БПЛА и как станция подзарядки.
Ниже рассмотрен частный случай, когда решение о взаимодействии между станцией и БПЛА принимают последние (это соответствует второму режиму работы заявляемого способа), тем самым корректируя свои маршруты между заданными пунктами назначения с целью минимизации выполнения своих миссий. Такая корректировка становится возможной спустя некоторое время, требующееся для определения адекватного набора весовых коэффициентов (4) в отношении каждой станции каждым БПЛА на основе выполняемых им задач.
Особенную актуальность рассмотренное выше децентрализованное управление приобретает для энергетических зарядных станций на базе возобновляемых источников энергии. Такие станции целесообразно устанавливать, во-первых, в труднодоступных местах, где затруднена или экономически неэффективна централизованная подача электроэнергии; во-вторых, в местах, где пребывание человека-оператора обслуживания станций/ мобильных объектов по тем или иным причинам должно быть сокращено или исключено. В обоих этих случаях отсутствие централизованной выработки энергии и требование сокращения участия оператора диктует необходимость использования заявленного выше децентрализованного способа управления, подразумевающего, в частности, оптимизацию процесса выработки энергии станциями, снабженными МП, и режимов функционирования БПЛА.
Каждый модуль подзарядки содержит: 1) платформу-носитель, которая может быть стационарной или мобильной и на которой устанавливается указываемое ниже оборудование; 2) комплексную силовую энергетическую установку, состоящую, в общем случае, из ветроэнергетической установки и фотопреобразующих элементов, совместная работа которых регулируется единым блоком управления; 3) модуль заряда/ смены аккумуляторных батарей БПЛА либо модуль беспроводной подзарядки; 4) модуль анализа энергетического состояния и прогнозирования работы данного МП; 5) модуль приемо-передачи для обмена информационными сигналами с отдельными ПРС группы.
Каждая станция получает сигналы запроса о подзарядке, приходящие от БПЛА, находящихся в ее окрестности, и анализирует возможность реализации каждой такой подзарядки, исходя из своего текущего энергетического запаса, а также, возможно, опираясь на прогноз вырабатываемой ею мощности в ближайшем будущем. В ответ станция направляет каждому БПЛА, пославшему ей запрос, ответный сигнал, в котором передается информация об энергии, которая может быть доступной для этого БПЛА на этой станции в текущий момент времени. Далее бортовой вычислитель данного БПЛА выбирает наиболее подходящую станцию с номером q=qopt(s) и посылает этой станции сигнал о намерении на ней приземлиться. Станция с номером qopt{s) после получения этого сигнала производит резервирование соответствующей части своей энергии под зарядку именного данного БПЛА. И обмен информацией этой станции со всеми другими БПЛА, которые могут обратиться позже, будет производиться с учетом этого резерва, равно как и с учетом информации обо всех ранее записанных резервах.
Компонентами вектора Xpq(s) являются: En,i(s) - потребность р-го БПЛА в энергии заряда с учетом достижения q-й станции; Tpq(s) - реальное время, которое потратит БПЛА на достижение ближайшей целевой точки маршрута с учетом предварительного достижения q-й станции и подзарядки на ней. Вектор  здесь состоит из одного элемента:
здесь состоит из одного элемента:  - реальной энергии, доступной для данного БПЛА на q-й станции в момент ее достижения, с учетом обращений к этой станции других БПЛА. Величины Xpq(s) и
- реальной энергии, доступной для данного БПЛА на q-й станции в момент ее достижения, с учетом обращений к этой станции других БПЛА. Величины Xpq(s) и  актуальны только при выборе пары в качестве подлежащей взаимодействию.
актуальны только при выборе пары в качестве подлежащей взаимодействию.
После принятая решения о выборе некоторой станции подзарядки формируется соответствующий сигнал, который с помощью приемо-передающего модуля данного ПРС передается выбранной станции.
Функционал ФАВ(р,q,sp) следующим образом зависит от A, δ по (2):

где частичные функционалы  заданы выражениями:
заданы выражениями:


s-порядковый номер приземления, совершенного данным р-м БПЛА; ΔT - оценка верхней границы  ;
;  - максимально возможная энергия, которая может быть выделена одному БПЛА подзарядки. Вектор весовых коэффициентов δ=[δЕ, δТ] обновляется по следующему правилу:
- максимально возможная энергия, которая может быть выделена одному БПЛА подзарядки. Вектор весовых коэффициентов δ=[δЕ, δТ] обновляется по следующему правилу:



Весовые коэффициенты δЕ,pq характеризуют среднюю степень востребованности накопленной на q-й станции свободной энергии для р-го БПЛА с учетом всех предыдущих (до на s-шага) опытов получения/ недополучения/ неполучения энергии этим БПЛА на этой станции; Весовые коэффициенты δT,pq характеризуют сравнительные средние временные затраты, которые сопутствовали подзарядке р-го БПЛА на q-й станции в прошлом вплоть до s-шага.
Коэффициенты δE,pq(s), δT,pq(s) для всех p,q,s удовлетворяют условиям нормировки:

В результате максимизации функционала (5) получаем станцию с номером qopt(s), которая и выбирается в качестве объекта для ближайшего взаимодействия БПЛА с номером р.
Эффективность адаптивного выбора подходящей станции подзарядки по заявляемому алгоритму, конкретизированному выражениями (5)-(12), повышается каждый раз за счет анализа накопленной к текущему моменту времени информации об опытах подзарядки данного БПЛА. Эта информация аккумулируется в величинах ηpq(s) и ξpq(s).
Снижение веса δE,pq (s) для q-станции по сравнению с ее начальным значением в (8) может быть вызвано следующими факторами: 1) редким использованием станции р-м БПЛА в силу особенностей используемых им регулярных траекторий; 2) периодическими и достаточно резкими изменениями в условиях функционирования станции, приводящими к значительному снижению реальной энергии Epq(s) по отношению к соответствующей заявленной  ; 3) непредвиденными изменениями на пути следования БПЛА до этой станции, которые могут происходить с самим БПЛА, в результате чего может резко повышаться величина En,pq(s), например, в результате спонтанных ветровых порывов, ухудшений условий видимости, появления случайных препятствий; 4) неточностью расчета значения энергии, которую станция потенциально может предоставить данному БПЛА; 5) помехой в канале связи, искажающей принимаемую на борту БПЛА информацию о величине
; 3) непредвиденными изменениями на пути следования БПЛА до этой станции, которые могут происходить с самим БПЛА, в результате чего может резко повышаться величина En,pq(s), например, в результате спонтанных ветровых порывов, ухудшений условий видимости, появления случайных препятствий; 4) неточностью расчета значения энергии, которую станция потенциально может предоставить данному БПЛА; 5) помехой в канале связи, искажающей принимаемую на борту БПЛА информацию о величине  ; 6) прочими причинами.
; 6) прочими причинами.
Снижение веса δT,pq (s) обусловлено факторами 1) и 3) из представленного выше перечня, а также определяется особенностью взаимного расположения области прохождения маршрутов БПЛА по отношению к месту нахождения станции.
Вычислительный блок каждого БПЛА учится выбирать наиболее подходящую, в отношении некоторого критерия, станцию в условиях данных территории функционирования, расположения отдельных станций и регулярных траекторий следования БПЛА. При принудительной смене этих условий обучение должно производиться заново. В то же время, опыт произведенного обучения позволяет корректировать указанные условия, если это возможно и/или целесообразно, конечно, с привлечением внешних по отношению к РОС сил, в том числе, оператора.
Заявляемый способ дает возможность отдельным БПЛА обмениваться накопленным опытом, децентрализовано или с помощью периодического подключения оператора, что целесообразно, если они осуществляют однотипные задачи или двигаются в среднем по одинаковым регулярным траекториям.
Рассмотренный здесь децентрализованный адаптивный выбор пар взаимодействующих объектов особенно эффективен для энергетических распределенных систем, включающих станции подзарядки автономных мобильных объектов, в том числе БПЛА, на базе возобновляемых источников ветровой и солнечной энергий.
Эффективность метода должна расти с увеличением числа элементов системы и ростом числа взаимодействий, осуществленных каждым данным элементом системы к текущему моменту, т.е. времени обучения.
Технико-экономические преимущества заявляемого способа перед известными. Технико-экономическим преимуществом заявляемого способа по отношению к существующим централизованным методам координации действий элементов рассматриваемой сети, а также к возможным децентрализованным методам без самообучения, является минимизация времени решения поставленных перед группой ПРС задач, а также выходов из строя ПРС в процессе выполнения миссии, что достигается за счет оптимизации выбора пары взаимодействующих станций и ПРС в каждом конкретном случае на базе как текущих характеристик всех элементов системы, так и предыстории всех предшествующих взаимодействий для каждого из элементов.
Одним из наиболее важных случаев указанного взаимодействия является автоматической подзарядка/ дозаправка, в том числе БПЛА, как в стационарных, так и нестационарных условиях, при этом группа ПРС заданной численности может функционировать полностью автономно в течение длительного срока на определенной географической территории. При этом месторасположение отдельных автономных станций подзарядки на этой территории зависит от формы, размеров, площади последней, и заданных/ возможных режимов функционирования группы ПРС на ней.
Данное решение, будучи примененным к энергетической распределенной сети, включающей группу подвижных роботизированных объектов и станции их подзарядки, в отличие от существующих, позволяет значительно расширить время автономной работы всей группы ПРС на определенной территории. В случае, когда, например, предполагается разовая работа группы БПЛА, например, для однократной съемки непротяженного объекта инфраструктуры, то может быть применена не вся сеть станций подзарядки, а только одна или, максимум, две таких станции; при этом время, затрачиваемое на процесс подзарядки, сокращается, минимум, в 5 раз по сравнению с ручной подзарядкой одного БПЛА одним оператором, и минимум в 10 раз по сравнению с ручной подзарядкой двух и более БПЛА, одним оператором. При работе группы ПРС, насчитывающих десятки элементов, время, затрачиваемое на подзарядку, может быть сокращено, минимум, на два порядка; при этом имеет место значительная экономия в использовании рутинного человеческого труда.
Свойство децентрализованности управления взаимодействием ПРС и стыковочных станций, существенное для заявляемого способа, делает его, в отличие от существующих, особенно эффективным в тех условиях, когда работа оператора невозможна, небезопасна или малоэффективна: гористой местности, поверхности воды, труднопроходимых районов лесных массивов и т.п.; местах радиационного заражения, очагов пожаров, северных районах и т.п.; сельских районах; в условиях плотной городской застройки, делающей применение обычного транспорта слабоэффективным.
Положительный эффект от применения заявляемого метода может быть связан с функционированием в городских или сельских условиях, где ручной тип подзарядки хотя и может применяться, но значительно менее эффективен, чем автоматическая система подзарядки. Причем разрыв в эффективности двух этих типов подзарядки будет сильно расти, во-первых, с ростом числа ПРС, подлежащих обслуживанию, во-вторых, с ростом площади территории, которая должна быть покрыта данной группой ПРС в процессе своего функционирования, и, в-третьих, - с увеличением времени функционирования указанной группы на данной территории вследствие эффекта самообучения при принятии решений.
Изобретение относится к способу децентрализованного управления распределенной обобщенной сетью подвижных роботизированные средств и стыковочных станций. Для децентрализованного управления осуществляют децентрализованное взаимодействие между каждой парой, образованной подвижным роботизированным средством, осуществляющим движение, и стыковочной станцией. Ремонтное обслуживание роботизированных средств или вывод их из строя определяются оператором или автоматизированным командным звеном определенным образом по заданным критериям функционирования сети с учетом накопленной информации о предыдущих взаимодействиях. Обеспечивается повышение эффективности автономного функционирования группы подвижных роботизированных средств. 2 ил.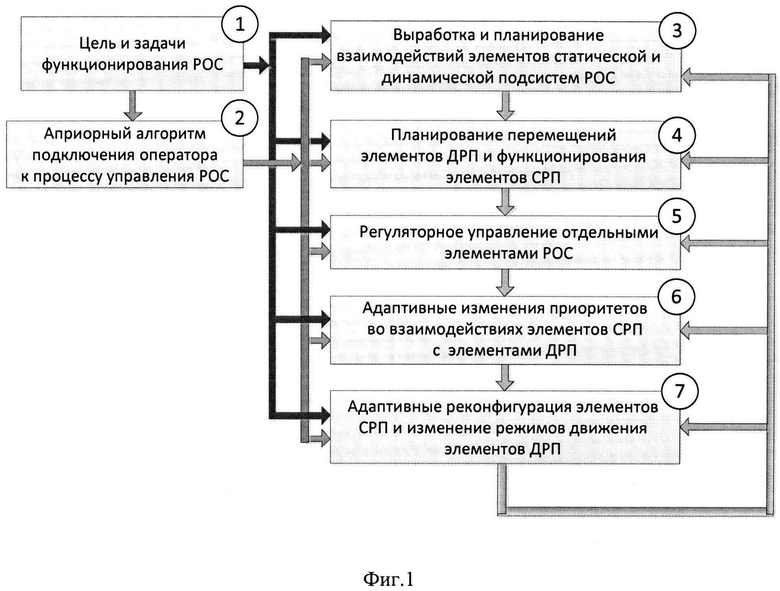
Способ децентрализованного управления распределенной обобщенной сетью подвижных роботизированных средств и стыковочных станций, заключающийся в том, что осуществляют децентрализованное взаимодействие между каждой парой, образованное подвижным роботизированным средством, осуществляющим автономное или дистанционно управляемое движение между пунктами назначения, включая этапы стыковки и посадки на специально оборудованные площадки станций, изначальные маршруты следования каждого подвижного робототехнического средства, а также моменты, когда элементам сети требуется существенная корректировка режимов их функционирования, и стыковочной станцией, реализованное с помощью модуля приема и передачи информационных сигналов, вычислительного модуля, датчиков для измерения собственных величин и величин внешней среды, которыми оборудован каждый элемент сети, а также навигационных модулей, автопилотов, модулей полезной нагрузки, которыми дополнительно оборудованы подвижные роботизированные средства,
отличающийся тем, что ремонтное обслуживание или вывод их из строя определяются оператором или автоматизированным командным звеном на основе цели и задач функционирования всей системы, а решение о потенциально возможном взаимодействии между каждой такой парой основано на выборах, производимых обоими ее элементами или одним из них, с возможностью использования накопленной информации о предыдущих взаимодействиях для оптимизации процесса последующих взаимодействий подвижных роботизированных средств и стыковочных станций по заданным критериям функционирования сети, в котором допускается принудительное подключение оператора или автоматизированного командного звена в контур управления.
| НАЗЕМНЫЙ ПУНКТ УПРАВЛЕНИЯ РОБОТОТЕХНИЧЕСКИМИ КОМПЛЕКСАМИ | 2017 |
|
RU2661264C1 |
| US 11029682 B2, 08.06.2021 | |||
| EP 3158553 B1, 28.11.2018 | |||
| EP 3633653 A1, 08.04.2020 | |||
| US 10860015 B2, 08.12.2020. | |||

