Группа изобретений относится к системам управления дорожными транспортными средствами.
В настоящее время в автомобилях для управления скоростью используются системы круиз-контроля (СКК) как адаптивные, так и неадаптивные. Неадаптивные имеют возможность поддержания заданной водителем скорости или ограничения максимальной заданной водителем скорости. Адаптивные системы, кроме того, позволяют выдерживать заданное расстояние от впереди идущих автомобилей, останавливаться при остановке впереди идущего автомобиля, возможны и некоторые другие функции.
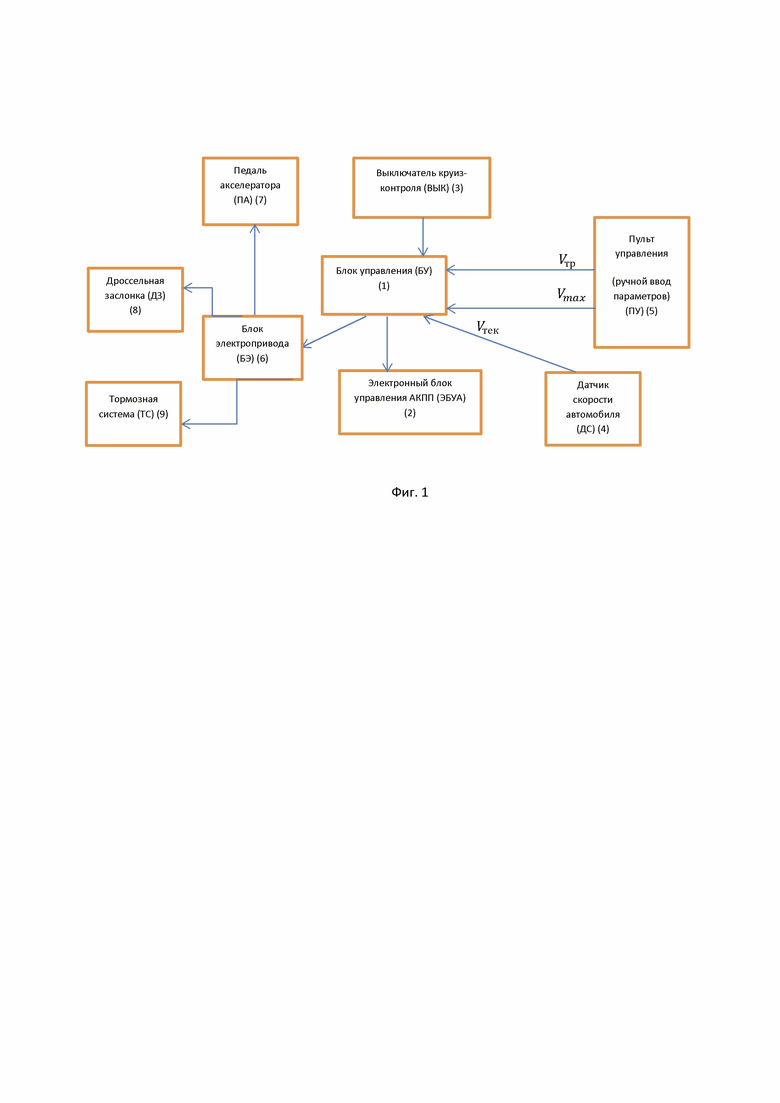
На фиг. 1 приведена блок-схема одного из вариантов известных из предшествующего заявленной группе изобретений уровня техники пассивной системы круиз-контроля, в состав которой входят: пульт управления (ПУ), блок управления (БУ), блок электропривода (БЭ), датчик скорости автомобиля (ДС), электронный блок управления (ЭБУА) автоматической коробкой переключения передач (АККП) и выключатель системы круиз-контроля (ВЫК).
ВЫК - производит включение или выключение системы круиз-контроля;
ПУ - с помощью него водитель задает значения необходимой скорости Vтp или(и) значение максимальной скорости Vmax, увеличивает или уменьшает заданную скорость, возвращается к ранее заданной скорости;
БУ - обеспечивает расчет и формирование управляющих сигналов для управления дроссельной заслонки, педалью акселератора, тормозной системой и автоматической коробкой передач.
Известна система контроля движения транспортного средства, включающая контроллер, запрограммированный, чтобы в ответ на превышение транспортным средством порогового значения скорости, уменьшать крутящий момент на выходном валу силовой передачи на основании параметра комфорта торможения, так что скорость становится меньше порогового значения, причем контроллер также запрограммирован, чтобы в ответ на сигнал, указывающий расстояние между транспортным средством и объектом, и скорость, превышающую другое пороговое значение, продиктованное данным расстоянием, приводить в действие тормозную систему на основании параметра комфорта торможения, из условия, чтобы скорость становилась меньшей, чем другое пороговое значение (RU 2699325 25.02.2016). Данная система не применима при движении транспортного средства с высокой скоростью.
Известна система контроля движения транспортного средства, включающая навигационное устройство для обнаружения параметров местности, в которой находится транспортное средство, датчик акселератора, микропроцессор, запрограммированный на определение характеристик движения так, чтобы движение изменялось в соответствии с изменениями параметров местности, устройство управления в соответствии с характеристиками движения, определенными микропроцессором (GB 2319635 А 18.01.2000). Данная система недостаточно эффективно реагирует на колебания скорости и не обеспечивает эффективный ее контроль.
Известна навигационная система для автотранспортного средства, содержащая блок ввода, определяющего максимальное время в пути для поездки из первого местоположения во второе местоположение, блок определения местоположения для определения текущего местоположения транспортного средства, блок вывода команд движения, которые соответствуют текущей позиции транспортного средства, центральный процессор, соединенный с модулем ввода, модулем определения положения, модулем вывода и выполненный с возможностью вычисления маршрута между первым местоположением и вторым местоположением со ссылкой на картографические данные, содержащие информацию для определения прогнозируемого расхода топлива для маршрута, чтобы максимальное время в пути не превышалось, а ожидаемый расход топлива был минимальным (US 2005055157 А1, 10.03.2005). Данная система не в достаточной степени обеспечивает гибкий контроль скорости в реальном времени.
Ближайшим аналогом предлагаемой группы изобретений можно считать систему контроля движения и метод ее применения по US 2005055157 А1, 10.03.2005.
Технической проблемой является контроль скорости транспортного средства в реальном времени, время реакция навигационной системы на изменение параметров движения, своевременность коррекции скорости транспортного средства.
Существующие системы контроля скорости не всегда способны обеспечить надлежащий своевременный контроль в связи с высокими скоростями современных дорожных транспортных средств.
Предлагается группа изобретений, включающая способ управления скоростью автомобиля, система управления скоростью автомобиля, позволяющая осуществить этот способ, автомобиль, оснащенный системой управления скоростью.
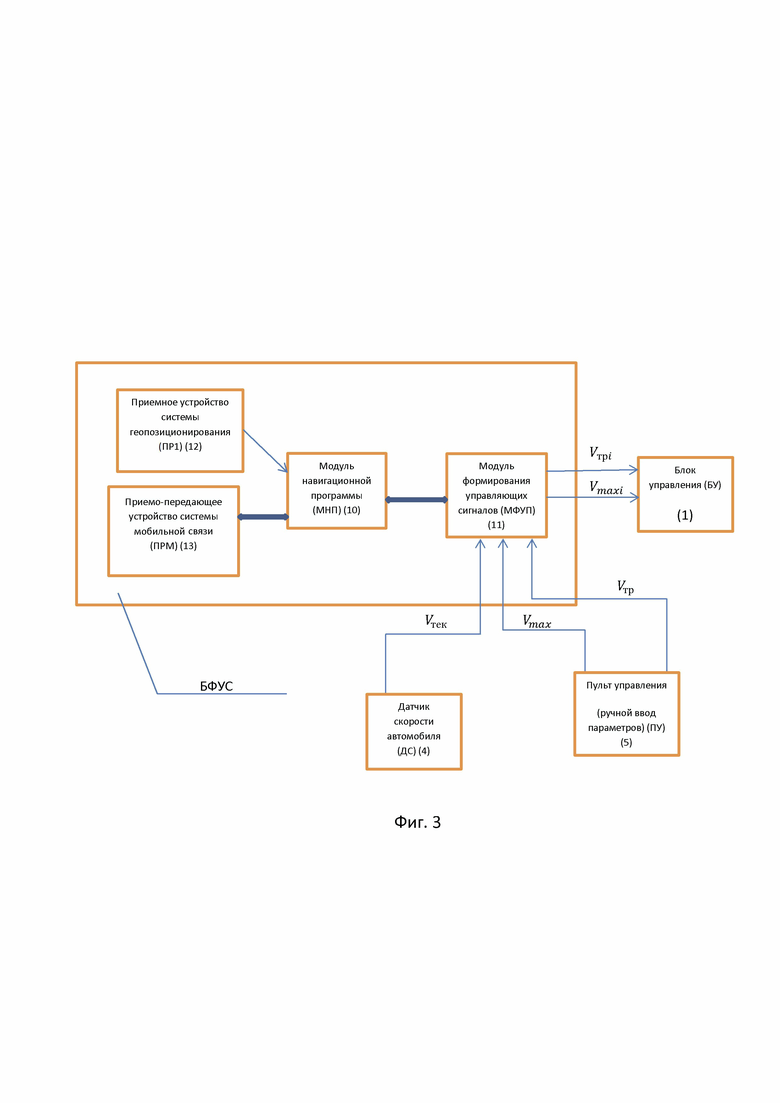
Система управления скоростью автомобиля (фиг. 2) включает СКК и водительский интерфейс ввода, причем СКК содержит ПУ, БУ, ДС, также включает блок формирования управляющих сигналов (БФУС), присоединенный к СКК, БФУС (фиг. 3) состоит из приемного устройства системы геопозиционирования (ПР1), приемо-передающего устройства системы мобильной связи (ПРМ), модуля навигационной программы (МНП) и модуля формирования управляющих параметров для системы круиз контроля (МФУП), причем ПР1 и ПРМ подключены к МНП, МНП подключен к МФУП, МФУП подключен к СКК, а именно к БУ, ПУ и ДС, в МНП установлена навигационная программа, выполненная с возможностью получения информации от ПР1 и ПРМ в реальном времени для передачи в МФУП, который выполнен с возможностью формирования управляющих сигналов.
Данная система устанавливается на автомобиль.
Предлагаемый способ управления скоростью автомобиля включает задание максимальной скорости Vmax или требуемой скорости Vтp для системы круиз контроля, измерение текущей скорости автомобиля Vтек, формирование и подачу системой круиз-контроля управляющих сигналов для поддержания заданной Vтp или для не превышения Vmax на узлы управления двигателем, а именно, дроссельную заслонку двигателя внутреннего сгорания или на устройство, регулирующее напряжение на электромоторах, и тормозную систему автомобиля. При осуществлении способа контроля скорости автомобиля принимают сигналы от спутниковых систем геопозиционирования, запускают навигационную программу, получают по мобильной системе связи необходимую информацию для работы навигационной программы, строят с помощью навигационной программы маршрут следования с учетом карт местности, определяют разрешенные скорости Vpi сразу на всех n участках маршрута, причем i меняется от 1 до n или по мере продвижения автомобиля по маршруту определяют с помощью навигационной программы местоположение автомобиля и разрешенную в данном месте скорость Vpi, изменяют на каждом n-м участке маршрута значения задаваемых для системы круиз контроля параметров максимальную скорость Vmax или требуемую скорость Vтp, то есть определяют Vmaxi и Vтpi для данных координат автомобиля, для этого сравнивают Vpi с Vmax или с Vтp, и если Vpi<Vmax, то Vmaxi=Vpi, если Vpi<Vтp то Vтpi=Vpi, если Vpi≥Vmax, то Vmaxi=Vmax, если Vpi≥Vтр, то VTpi=VTp.
Также при осуществлении способа контроля скорости автомобиля сравнивают Vmaxi или Vтpi с Vp(i+1), и если (Vp(i+1)-Vmaxi)<0 или (Vp(i+1)-Vтpi)<0, то принимается решение о торможении автомобиля, для чего определяется точка на маршруте, где начнется торможение Sтopт(i,k) или Sторм1(i,k) (k - количество последующих после (i)-гo участка участков маршрута на которых необходимо непрерывно снижать скорость), для этого в реальном времени с периодом достаточном для плавного и эффективного торможения (например 0,1 сек.) вычисляют расстояние от текущей точки нахождения автомобиля до точки начала (i+k+1) участка маршрута Sтек(t), сравнивают Sтек(t) с Sторм(i,k) или с Sторм1(i,k), вычисляют расстояние Sторм(i,k) или Sторм1(i,k), и если выполняется условие Sтек(t)≤Sторм(i,k), то параметру Vmaxi на маршруте на протяжении расстояния Sторм(i,k) присваивается значение  то есть Vmaxi=Vпорi(t), если выполняется условие Sтек(t)≤Sторм1(i,k), то параметру Vтpi присваивается значение
то есть Vmaxi=Vпорi(t), если выполняется условие Sтек(t)≤Sторм1(i,k), то параметру Vтpi присваивается значение  то есть Vтpi=Vпорi(t).
то есть Vтpi=Vпорi(t).
Также при осуществлении способа контроля скорости автомобиля расстояние Sторм(i,k) или Sторм1(i,k) вычисляют следующим образом. Определяют участки маршрута, на которых скорость Vp(i+j)>Vр(i+j+1) (j= , для каждого из этих (n-i+1) участков определяют расстояние торможения
, для каждого из этих (n-i+1) участков определяют расстояние торможения  или
или  по следующим формулам
по следующим формулам
=( -
- )/
)/ (+
(+
или =( -)/(+, где
-)/(+, где  например равно 0,5
например равно 0,5 сравнивают
сравнивают  или
или  , выделяют k участков следующих подряд за (i)-м участком, у которых
, выделяют k участков следующих подряд за (i)-м участком, у которых  , или
, или  (j=1
(j=1 , определяют
, определяют  =
= или
или  =
= , причем расстояния торможения или отсчитывается от начала (i+k+1)участка.
, причем расстояния торможения или отсчитывается от начала (i+k+1)участка.
Ускорение торможения может выбираться водителем из рекомендуемых значений или исходя из своих индивидуальных предпочтений на основании пробных заездов с разными ускорениями, задаваемыми им в пределах, предпочтительно, 0,3-1,5 .
.
Ускорение торможения может быть выбрано, например, 0,5 .
.
Техническим результатом предлагаемой группы изобретений является обеспечение контроля в реальном времени скорости транспортного средства, быстрота реакции навигационной системы на изменение параметров движения транспортного средства и своевременная, при необходимости, их коррекция. Кроме того становится возможным оперативное управление скоростью транспортного средства, вызванное изменением внешних условий из-за различных аварийных или чрезвычайных ситуаций. Предлагаемая группа изобретений в состоянии обеспечить достижение технического результата при высоких скоростях современных дорожных транспортных средств.
Предлагаемая группа изобретений характеризуется подключением к системе круиз-контроля дополнительного блока формирования управляющих сигналов (БФУС), обеспечивающего автоматическое изменение задаваемых
параметров Vтp и Vmax в зависимости от реальных скоростных ограничений на трассе.
На фиг. 1-3 обозначены:
1 - блок управления (БУ),
2 - электронный блок управления АКПП (ЭБУА),
3 - выключатель круиз-контроля (ВЫК),
4 - датчик скорости автомобиля (ДС),
5 - пульт управления (ПУ),
6 - блок электропривода (БЭ),
7 - педаль акселератора (ПА),
8 - дроссельная заслонка (ДЗ),
9 - тормозная система (ТС),
10 - модуль навигационной программы (МНП),
11 - модуль формирования управляющих сигналов (МФУП),
12 - приемное устройство системы геопозиционирования (ПР1),
13 - приемо-передающее устройство системы мобильной связи (ПРМ).
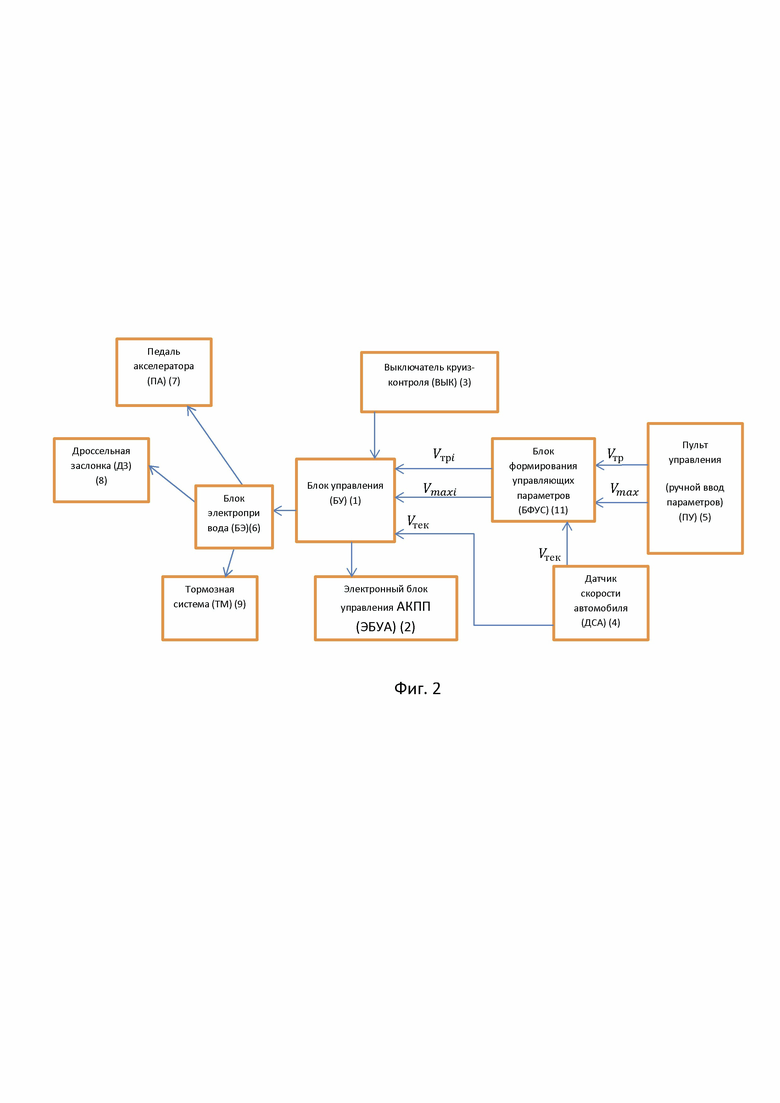
На фиг. 2 приведена блок схема измененной системы круиз-контроля с добавлением предлагаемого БФУС. Следует заметить, что данное предложение годится и для адаптивных систем круиз-контроля.
БФУС размещается между ПУ и БУ и выдает на БУ вместо заданных водителем Vтp и Vmax, Vтpi и Vmaxi, значения которых определяются в БФУС.
На фиг. 3 представлена блок-схема БФУС, в состав которого входит приемное устройство системы геопозиционирования (ПР1), приемопередающее устройство мобильной связи (ПРМ), модуль навигационной программы (МНП) и модуль формирования управляющих параметров (МФУП).
МФУП с помощью данных от МНП обеспечивает формирование в реальном времени текущих значений Vтpi и Vmaxi для управления с их помощью системой круиз-контроля.
Группа изобретений функционирует следующим образом. Задают с помощью водительского интерфейса ввода максимальную скорость Vmax или требуемую скорость Vтр. Измеряют с помощью ДС текущую скорость автомобиля Vтек. Принимают сигналы от спутниковых систем геопозиционирования с помощью ПР1, запускают навигационную программу на МНП, получают с помощью ПРМ необходимую информацию для работы навигационной программы, строят с помощью навигационной программы с МНП маршрут следования с учетом карт местности, определяют с помощью МФУП разрешенные скорости Vpi сразу на всех n участках маршрута следующим образом, i меняется от 1 до n или по мере продвижения автомобиля по маршруту определяют с помощью навигационной программы местоположение автомобиля и разрешенную в данном месте скорость Vpi. На каждом n-м участке маршрута изменяют значения задаваемых для системы круиз-контроля параметров максимальную скорость Vmax или требуемую скорость Vтр, то есть определяют Vmaxi и Vтрi для данных координат автомобиля, для этого сравнивают Vpi с Vmax или с Vтр, и если Vpi<Vmax, то Vmaxi=Vpi, если Vpi<Vтр то Vтрi=Vрi, если Vpi≥Vmax, то Vmaxi=Vmax, если Vpi≥Утр, то VTpi-Vтр.
При необходимости торможения сравнивают Vmaxi или с Vp(i+1), и если (Vp(i+1)-Vmaxi)<0 или (Vp(i+1)-Vтpi)<0, то принимается решение о торможении автомобиля, для чего определяется точка на маршруте, где начнется торможение Sторм(i,k) или Sторм1(i,k) (k - количество последующих после (i)-гo участка участков маршрута на которых необходимо непрерывно снижать скорость), для этого в реальном времени с периодом достаточном для плавного и эффективного торможения (например 0,1 сек.) вычисляют расстояние от текущей точки нахождения автомобиля до точки начала (i+k+1) участка маршрута Sтек(t), сравнивают Sтек(t) с Sтopм(i,k) или с Sтopм1(i,k), вычисляют расстояние Sтopм(i,k) или Sтopм1(i,k), и если выполняется условие Sтек(t)≤Sтopм(i,k), то параметру Vmaxi на маршруте на протяжении расстояния Sтopм(i,k) присваивается значение  то есть Vmaxi-Vпopi(t), если выполняется условие Sтек(t)≤Sтopм1(i,k), то параметру Vтpi присваивается значение
то есть Vmaxi-Vпopi(t), если выполняется условие Sтек(t)≤Sтopм1(i,k), то параметру Vтpi присваивается значение  то есть Vтpi=Vпорi(t).
то есть Vтpi=Vпорi(t).
Расстояние Sтopм(i,k) или Sтopм1(i,k) вычисляют следующим образом. Определяют участки маршрута, на которых скорость Vp(i+j)>Vp(i+j+1) (j=0÷n-i), для каждого из этих (n-i+1) участков определяют расстояние торможения Sторм(i+j) или Sторм1(i+j) по следующим формулам

или  где аторм например равно
где аторм например равно  сравнивают Sторм(i+j) или Sторм1(i+j) c длиной (i+j)участков маршрута Li+j, выделяют к участков следующих подряд за (i)-м участком, у которых Sторм(i+j)>Li+j, или Sторм(i+j)>Li+j (j=1÷k), определяют
сравнивают Sторм(i+j) или Sторм1(i+j) c длиной (i+j)участков маршрута Li+j, выделяют к участков следующих подряд за (i)-м участком, у которых Sторм(i+j)>Li+j, или Sторм(i+j)>Li+j (j=1÷k), определяют  или
или  причем расстояния торможения Sторм(i,k) или Sторм1(i,k) отсчитывается от начала (i+k+1)участка.
причем расстояния торможения Sторм(i,k) или Sторм1(i,k) отсчитывается от начала (i+k+1)участка.
Наличие подключенного к системе круиз-контроля дополнительного специализированного блока БФУС обеспечивает эффективный контроль при движении на высокой скорости, гибкое и своевременное реагирование на изменение параметров.
Установка на автомобили систем контроля скорости с дополнительным специализированным блоком будет способствовать улучшению безопасности движения.
Изобретение относится к транспортным средствам. Система управления скоростью автомобиля включает систему круиз-контроля и водительский интерфейс ввода. Дополнительно имеется блок формирования управляющих сигналов, присоединённый к системе круиз-контроля. Блок формирования управляющих сигналов состоит из приёмного устройства системы геопозиционирования, приемо-передающего устройства системы мобильной связи, модуля навигационной программы и модуля формирования управляющих параметров для системы круиз-контроля. Навигационная программа получает информацию от приёмного устройства системы геопозиционирования и приемо-передающего устройства системы мобильной связи в реальном времени для передачи в модуль формирования управляющих параметров для системы круиз-контроля. Улучшается контроль скорости. 3 н. и 6 з.п. ф-лы, 3 ил.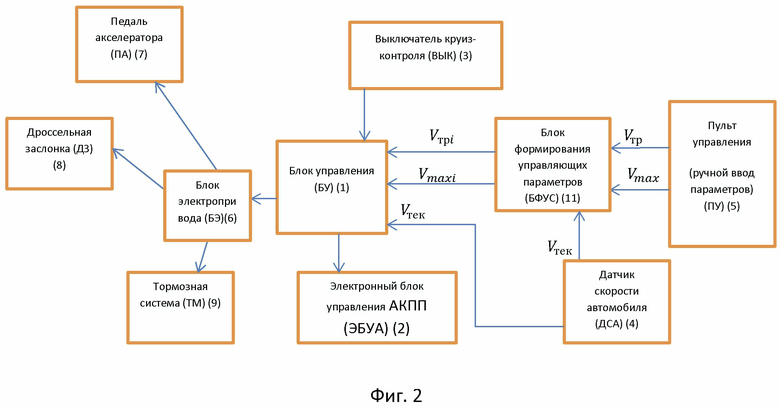
1. Система управления скоростью автомобиля, включающая систему круиз-контроля (СКК) и водительский интерфейс ввода, причём СКК содержит пульт управления (ПУ), блок управления (БУ), датчик скорости (ДС), отличающаяся тем, что дополнительно включает блок формирования управляющих сигналов (БФУС), присоединённый к СКК, БФУС состоит из приёмного устройства системы геопозиционирования (ПР1), приемо-передающего устройства системы мобильной связи (ПРМ), модуля навигационной программы (МНП) и модуля формирования управляющих параметров для системы круиз-контроля (МФУП), причём ПР1 и ПРМ подключены к МНП, МНП подключен к МФУП, МФУП подключён к СКК, а именно к БУ, ПУ и ДС, в МНП установлена навигационная программа, выполненная с возможностью получения информации от ПР1 и ПРМ в реальном времени для передачи в МФУП, который выполнен с возможностью формирования управляющих сигналов.
2. Способ управления скоростью автомобиля, включающий задание максимальной скорости  или требуемой скорости
или требуемой скорости  для системы круиз-контроля, измерение текущей скорости автомобиля
для системы круиз-контроля, измерение текущей скорости автомобиля  формирование и подачу системой круиз-контроля управляющих сигналов для поддержания заданной или для не превышения
формирование и подачу системой круиз-контроля управляющих сигналов для поддержания заданной или для не превышения на узлы управления двигателем, а именно дроссельную заслонку двигателя внутреннего сгорания или на устройство, регулирующее напряжение на электромоторах, и тормозную систему автомобиля, отличающийся тем, что способ осуществляют с помощью системы по п.1, причём принимают сигналы от спутниковых систем геопозиционирования, запускают навигационную программу, получают по мобильной системе связи необходимую информацию для работы навигационной программы, строят с помощью навигационной программы маршрут следования с учетом карт местности, определяют разрешенные скорости
на узлы управления двигателем, а именно дроссельную заслонку двигателя внутреннего сгорания или на устройство, регулирующее напряжение на электромоторах, и тормозную систему автомобиля, отличающийся тем, что способ осуществляют с помощью системы по п.1, причём принимают сигналы от спутниковых систем геопозиционирования, запускают навигационную программу, получают по мобильной системе связи необходимую информацию для работы навигационной программы, строят с помощью навигационной программы маршрут следования с учетом карт местности, определяют разрешенные скорости  сразу на всех
сразу на всех  участках маршрута, причём
участках маршрута, причём  меняется от 1 до
меняется от 1 до  или по мере продвижения автомобиля по маршруту определяют с помощью навигационной программы местоположение автомобиля и разрешенную в данном месте скорость
или по мере продвижения автомобиля по маршруту определяют с помощью навигационной программы местоположение автомобиля и разрешенную в данном месте скорость  , изменяют на каждом n-м участке маршрута значения задаваемых для системы круиз-контроля параметров максимальную скорость или требуемую скорость , то есть определяют
, изменяют на каждом n-м участке маршрута значения задаваемых для системы круиз-контроля параметров максимальную скорость или требуемую скорость , то есть определяют  и
и  для данных координат автомобиля, для этого сравнивают с или с , и если
для данных координат автомобиля, для этого сравнивают с или с , и если  , то
, то 
 если , то =, если
если , то =, если  , то =, если ≥ Vтр, то Vтрi=Vтр.
, то =, если ≥ Vтр, то Vтрi=Vтр.
3. Способ по п.2, отличающийся тем, что сравнивают  с
с или , если (
или , если ( 
 или (
или (  , то принимается решение о торможении автомобиля, для чего определяется точка на маршруте, где начнется торможение
, то принимается решение о торможении автомобиля, для чего определяется точка на маршруте, где начнется торможение  или
или  , где k - количество последующих после i-го участка участков маршрута, на которых необходимо непрерывно снижать скорость, для этого в реальном времени с периодом, достаточным для плавного и эффективного торможения, вычисляют расстояние от текущей точки нахождения автомобиля до точки начала (i+k+1) участка маршрута
, где k - количество последующих после i-го участка участков маршрута, на которых необходимо непрерывно снижать скорость, для этого в реальном времени с периодом, достаточным для плавного и эффективного торможения, вычисляют расстояние от текущей точки нахождения автомобиля до точки начала (i+k+1) участка маршрута  , сравнивают
, сравнивают  t) с
t) с  или с
или с  , вычисляют расстояние
, вычисляют расстояние , и если выполняется условие
, и если выполняется условие  , то параметру
, то параметру  присваивается
присваивается
значение  ,
,
то есть  =
= , если выполняется условие
, если выполняется условие  , то параметру
, то параметру  присваивается значение
присваивается значение  , то есть
, то есть  .
.
4. Способ по п.3, где период, достаточный для плавного и эффективного торможения, равен 0,1 сек.
5. Способ по п.2, отличающийся тем, что расстояние  вычисляют следующим образом: определяют участки маршрута, на которых скорость
вычисляют следующим образом: определяют участки маршрута, на которых скорость  , для каждого из этих (n-i+1) участков определяют расстояние торможения
, для каждого из этих (n-i+1) участков определяют расстояние торможения  или
или  по следующим формулам
по следующим формулам
=( -
- )/
)/ (+
(+
или =( -)/(+,
-)/(+,
сравнивают  или
или  , выделяют k участков следующих подряд за i-м участком, у которых
, выделяют k участков следующих подряд за i-м участком, у которых  , или
, или  (j=1
(j=1 , определяют
, определяют  =
= или
или  =
= , причем расстояния торможения или отсчитываются от начала (i+k+1) участка.
, причем расстояния торможения или отсчитываются от начала (i+k+1) участка.
6. Способ по п.5, где  равно 0,5
равно 0,5 
7. Способ по п.5, где выбирается водителем из рекомендуемых значений или исходя из своих индивидуальных предпочтений на основании пробных заездов с разными ускорениями.
8. Способ по п.7, где от 0,3 до 1,5  .
.
9. Автомобиль, включающий систему управления скоростью автомобиля по п.1.
| US 20050055157 A1, 10.03.2005 | |||
| ТРАНСПОРТНОЕ СРЕДСТВО, СИСТЕМА И СПОСОБ УПРАВЛЕНИЯ СКОРОСТЬЮ ТРАНСПОРТНОГО СРЕДСТВА | 2016 |
|
RU2699325C2 |
| СПОСОБ И МОДУЛЬ ДЛЯ УПРАВЛЕНИЯ СКОРОСТЬЮ ТРАНСПОРТНОГО СРЕДСТВА | 2011 |
|
RU2535833C2 |
| СПОСОБ И МОДУЛЬ ДЛЯ УПРАВЛЕНИЯ СКОРОСТЬЮ ТРАНСПОРТНОГО СРЕДСТВА | 2011 |
|
RU2534114C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ТОРМОЖЕНИЕМ И СПОСОБ УПРАВЛЕНИЯ ТОРМОЖЕНИЕМ | 2015 |
|
RU2669505C1 |
| WO 2019008647 А1, 10.01.2019 | |||
| Рейсфедер | 1930 |
|
SU25731A1 |

