Изобретение относится к специализированным расточным станкам для восстановления или ремонта изделий путем наплавки металла на внутреннюю поверхность их отверстий с дальнейшей расточкой. Станок предназначен для восстановления цилиндрических отверстий и посадок под валы и подшипники, а также выравнивания соосности цилиндров непосредственно на подлежащем ремонту узле, без необходимости полной разборки агрегата и транспортировки его в ремонтную зону для последующей обработки на стационарных станках.
Из уровня техники известна машина для расточки и наплавки (US 6073322A, МПК В23К 9/04, В23К 9/28, В23Р 6/00, опубл. 13.06.2000). Машина представляет собой универсальный переносной автоматический сверлильно-наплавочный станок для выполнения сверления и сварки внутри и снаружи глухих и сквозных отверстий, содержащий патрубок; три полых вала, расположенных в упомянутом патрубке и расположенных соосно. При этом первый внутренний полый вал расположен внутри второго промежуточного полого вала, а третий вал является внешним, по отношению ко второму промежуточному; валы разделены друг от друга парами роликовых подшипников. Станок дополнительно содержит полый держатель для инструмента со средством для его удерживания, головки для инструмента и сварочной горелки, введенной через первый внутренний полый вал. Рабочие органы станка приводятся в действие тремя двигателями.
Недостатком известного технического решения является то, станок обладает низкой технологичностью, связанной с необходимостью использовать сразу три двигателя для приведения в движение его рабочих органов, при этом двигатель привода вращения не может работать на малых оборотах. Кроме того конструкция приводов требует сложной кинематики узлов привода борштанги - двухскоростного редуктора со сложной системой управления.
Наиболее близким техническим решением к заявленному изобретению и выбранным в качестве прототипа признан мобильный расточно-наплавочный комплекс (RU 2421303C2, МПК В23В 39/14, В23К 37/00, опубл. 20.06.2011). Комплекс содержит привод рабочего инструмента в виде борштанги или диэлектрического вала с наплавочной головкой, шасси, установленные на нем приводы механизма вращения и механизма продольной подачи борштанги с соответствующими двигателями, и закрепляемые на обрабатываемой детали, по меньшей мере, два суппорта, из которых один несущий суппорт выполнен с возможностью установки на него шасси, при этом суппорт дополнительно снабжен быстроразъемным конусным соединением шасси с несущим суппортом, имеющим цанговый зажим, установленный во вращающейся втулке суппорта.
Недостатком известного технического решения является его низкая технологичность, связанная со сложностью конструкции мобильного комплекса. Кроме того, в конструкции комплекса не предусмотрены средства числового программного управления, позволяющие управлять комплексом в полуавтоматическом и автоматическом режимах.
Технической задачей, на решение которой направлено заявленное изобретение, является повышение технологичности комплекса, эффективности его использования и точности обработки с его помощью отверстий при одновременном сохранении мобильности, надежности и низкой стоимости.
Указанная задача решена тем, что мобильный расточно-наплавочный комплекс состоит из цанговой передней траверсы, снабженной зажимными винтами и задней траверсы, соединенных левой и правой цилиндрическими направляющими, между которыми на ходовом винте, установлена разъемная цанговая каретка, снабженная зажимными винтами, с закрепленным в ней приводом осевого вращения. Ходовой винт снабжен маховиком ручного перемещения каретки и связан зубчато-ременной передачей с валом двигателя привода продольной подачи, закрепленного на нижнем торце задней траверсы. К приводу осевого вращения и двигателю привода продольной подачи подключены силовые выходы блока управления, выполненного на основе микроконтроллера. Дополнительно на передней и задней траверсах закреплены концевые датчики, выходы которых подключены к измерительным входам блока управления.
Положительным техническим результатом, обеспечиваемым раскрытой выше совокупностью признаков комплекса, является возможность использования в качестве привода осевого вращения сервопривод постоянного тока, электродрель или наплавочный модуль, за счет применения в конструкции комплекса разъемной цанговой каретки, что дает возможность устанавливать в нее приводы осевого вращения в разных исполнениях. Последнее дает возможность выполнять с помощью мобильного комплекса различные технологические операции в зависимости от вида применяемого привода, в частности использовать станок как для выполнения расточных, так и наплавочных операций. Кроме того, применение ходового винта, маховика ручного перемещения каретки, привода продольной подачи, концевых датчиков и блока управления дает возможность выполнять упомянутые технологические операции как в ручном, так и в полуавтоматическом и автоматическом режимах. Таким образом, комплекс повышает эффективность ремонта шарнирного соединения с одной степенью свободы в деталях и узлах крупногабаритных машин и механизмов, таких как экскаваторы, краны, дорожно-строительная техника, а также металлопрокатывающее, горношахтное, горнообогатительное и другое оборудование, предполагающее стационарное использование.
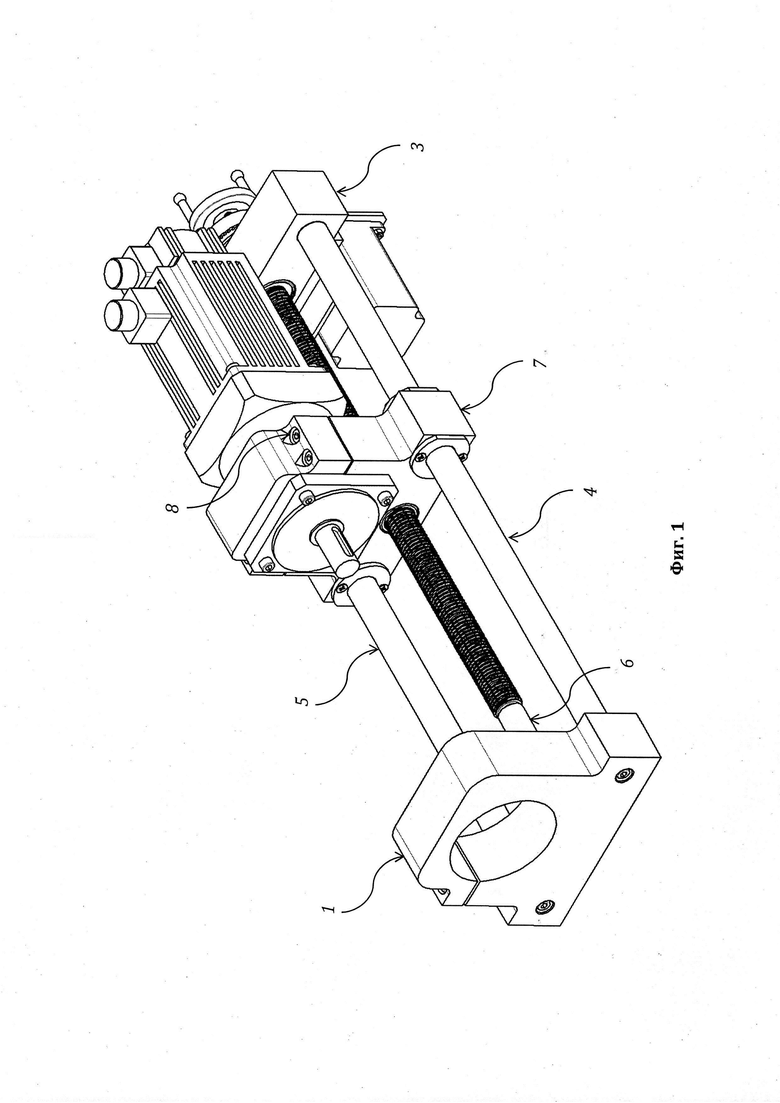
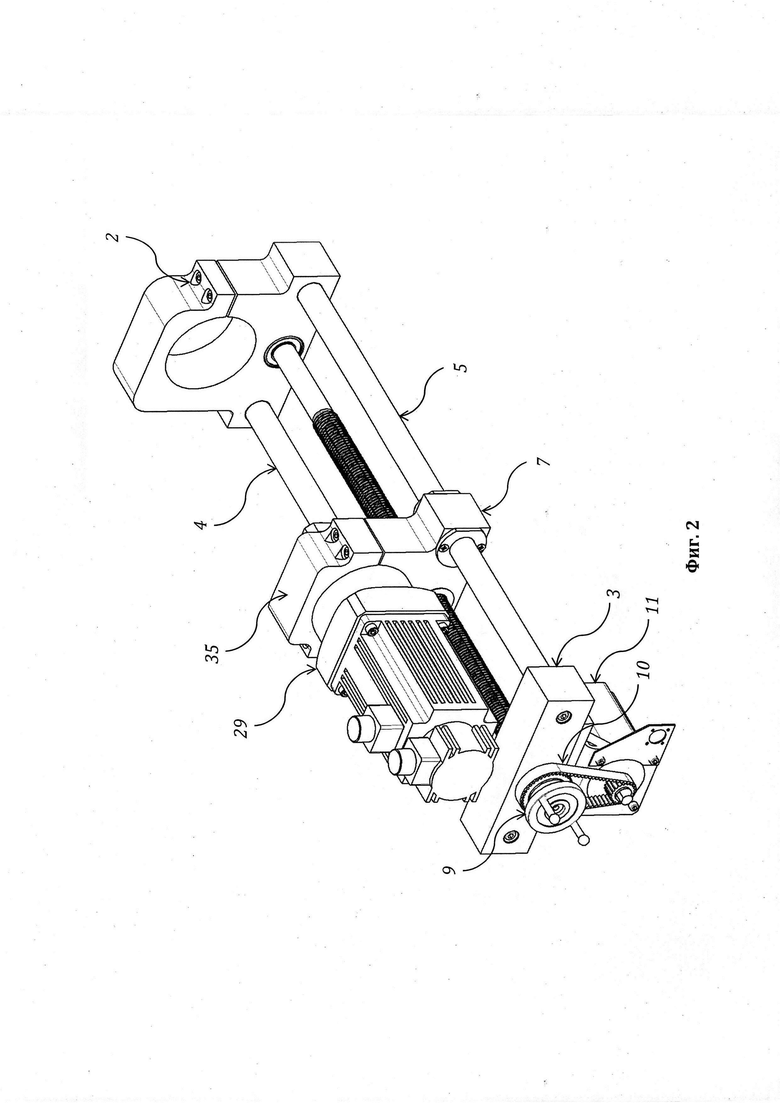
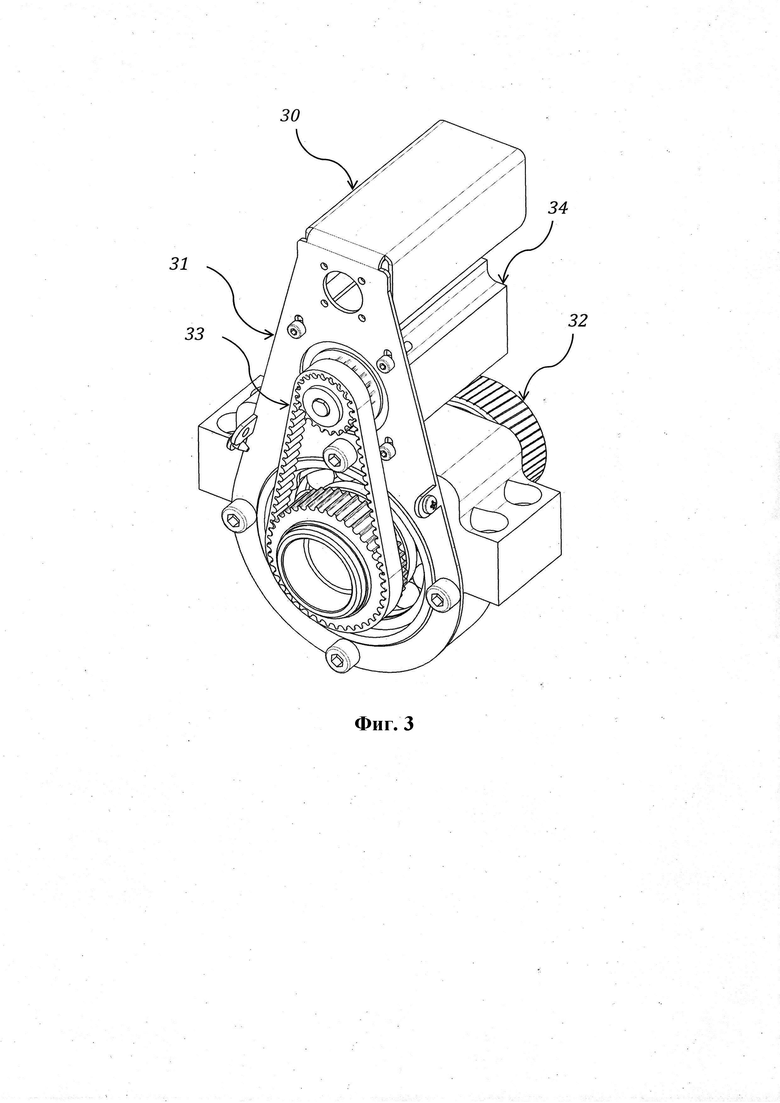
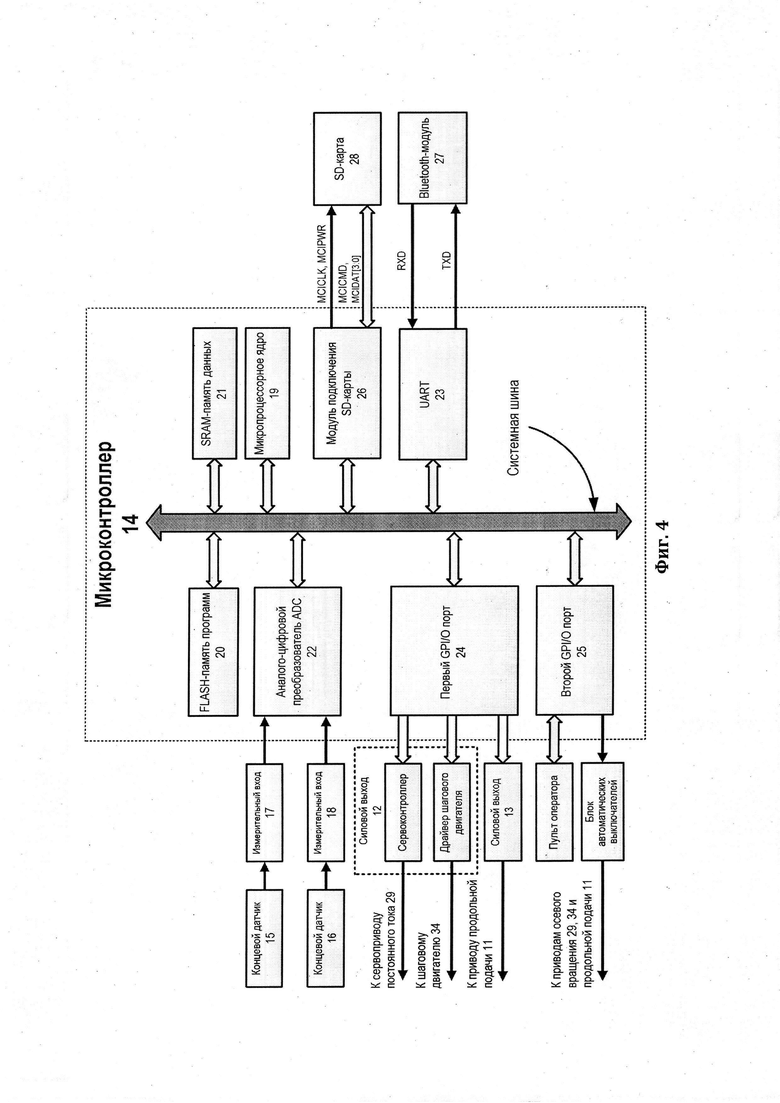
Конструкция мобильного расточно-наплавочныого комплекса поясняется чертежами, где на фиг. 1 показан его внешний вид в изометрической проекции со стороны передней траверсы; на фиг. 2 представлен внешний вид комплекса в изометрической проекции со стороны задней траверсы; на фиг. 3 приведен внешний вид привода осевого вращения в виде наплавочного модуля; на фиг. 4 приведена структурная схема блока управления комплексом.
Мобильный расточно-наплавочный комплекс устроен следующим образом.
Комплекс состоит из цанговой передней траверсы 1, снабженной зажимными винтами 2 и задней траверсы 3, соединенных левой и правой цилиндрическими направляющими 4 и 5, между которыми на ходовом винте 6, установлена цанговая каретка 7, снабженная зажимными винтами 8, с закрепленным в ней приводом осевого вращения. Ходовой винт 6 снабжен маховиком 9 ручного перемещения каретки 7 и связан зубчато-ременной передачей 10 с валом двигателя привода продольной подачи 11, закрепленного на нижнем торце задней траверсы 3. К приводу осевого вращения и двигателю привода продольной подачи 11 подключены первый и второй силовые выходы 12 и 13 блока управления, выполненного на основе микроконтроллера 14, при этом к входам упомянутых приводов дополнительно подключены входы блока автоматических выключателей. Дополнительно на передней и задней траверсах 1 и 3 закреплены первый и второй концевые датчики 15 и 16, выходы которых подключены, соответственно, к измерительным входам 17 и 18. Блок управления снабжен пультом оператора, содержащим клавиши «Старт» и «Стоп», а также светодиодные индикаторы текущих режимов работы устройства.
Цилиндрические направляющие 4 и 5 могут быть изготовлены из калиброванных хромированных штоков и установлены в отверстия передней и задней траверс 1 и 3 легкой прессовой посадкой, ходовой винт 6 может иметь трапециевидную или треугольную метрическую резьбу, а отверстия под цилиндрические направляющие 4, 5 и ходовой винт 6 целесообразно выполнять в единой заготовке для передней траверсы 1 и цанговой каретки 7 по одной программе на станке с числовым программным управлением для обеспечения соосности отверстий с дальнейшей резкой заготовки на упомянутые траверсу и каретку.
Микроконтроллер 14 блока управления содержит микропроцессорное ядро 19, соединенное с помощью системной шины с FLASH-памятью программ 20, SRAM-памятью данных 21, многоканальным аналого-цифровым преобразователем ADC 22, универсальным асинхронным приемопередатчиком UART 23, интерфейсом ввода/вывода общего назначения, сгруппированного, по крайней мере, в два GPI/O-порта ввода-вывода 24 и 25, и модулем подключения SD-карты 26.
К первой и второй линиям аналого-цифрового преобразователя ADC 22 подключены измерительные входы 17 и 18, универсальный асинхронный приемопередатчик UART 23 подключен к Bluetooth-модулю 27, линии первого GPI/O-порта ввода-вывода 24 подключены к первому силовому выходу 12 и второму силовому выходу 13, ко второму GPI/0-порту ввода-вывода 25 подключен пульт оператора и блок автоматических выключателей, а к модулю подключения SD-карты 26 может быть подключено устройство для чтения карт памяти (card reader], в которое установлена и электрически соединена с модулем SD-карта 28.
В качестве привода осевого вращения может быть использован сервопривод постоянного тока 29 с двигателем мощностью 1,5 кВт, снабженным планетарным редуктором (например, может быть применен сервопривод модели ADTECH QS7(Сервопривод ADTECH QS7 // AliExpress.ru URL: https://h5.aliexpress.ru/item/4000994043979.html (дата обращения: 10.11.2020).)), электродрель или наплавочный модуль 30, содержащий корпус 31, с установленной в нем головкой 32 под наплавочную штангу, соединенной зубчато-ременной передачей 33 с валом шагового двигателя 34. Привод продольной подачи 11 может быть выполнен в виде шагового двигателя, при этом силовой выход 12, подключенный к приводу осевого вращения, может быть выполнен комбинированным, включающим в себя сервоконтроллер, управляющий сервоприводом постоянного тока 29, в качестве которого целесообразно применить модуль QS7AA030M, входящий в комплект упомянутого сервопривода ADTECH QS7, и драйвер шагового двигателя, управляющий шаговым двигателем 34 наплавочного модуля 30. Силовой выход 13, подключенный к приводу продольной подачи 11, может представлять собой драйвер шагового двигателя, при этом в качестве упомянутых драйверов может быть использованы цифроаналоговые микрошаговые драйверы модели М880А(Драйвер шагового двигателя М880А // CompaactTool.ru URL: https://compacttool.ru/ viewtovar.php?id=1826 (дата обращения: 10.11.20201.). В качестве микроконтроллера может быть применена микросхема LPC2478(Single-chip 16-bit/32-bit micro; 512 kB flash, Ethernet, CAN, LCD, USB 2.0 device/host/OTG, external memory interface // LPC2478 URL: https://www.nxp.com/docs/en/data-sheet/LPC2478.pdf), основанная на микропроцессорном ядре ARM7TDMI-S, работающем на частоте 180 МГц. В качестве Bluetooth-модуля может быть использована сборка НС-05(Bluetooth модуль HC-05 // 3DiY URL: https://3d-diy.ru/wiki/arduino-moduli/bluetooth-modul-hc-05/).
Мобильный расточно-наплавочный комплекс работает следующим образом.
Первоначально, в зависимости от выполняемой операции (расточка или наплавка), в цанговую каретку 7 устанавливают привод осевого вращения, при этом в первом случае его роль выполняет сервопривод постоянного тока 29 (или электродрель), во втором случае привод представляет собой наплавочный модуль 30. В случае применения в качестве привода осевого вращения сервопривода постоянного тока 29, последний закрепляется на каретке 7 винтами 8 с помощью крышки 35. В случае применения наплавочного модуля 30 применение крышки не требуется, так как соответствующие фланцы 36 выполнены заодно с корпусом 31 и функцию крышки выполняет сам модуль. В случае выполнения расточной операции на вал сервопривода или электродрели посредством муфты монтируется расточная головка (на фигурах условно не показаны), в случае выполнения наплавочной операции в головку 32 устанавливается наплавочная штанга, выдвигается на требуемую длину и фиксируется. Затем к приводу продольной подачи 11 и приводу осевого вращения (сервоприводу постоянного тока 29 или шаговому двигателю 34 наплавочного модуля 30 в зависимости от операции) подключают силовые выходы 12 и 13. После выполнения описанных операций наладки комплекса приступают к выполнению расточных или наплавочных технологических операций.
Как при выполнении расточных, так и при выполнении наплавочных операций микроконтроллер 14 блока управления на основе управляющей программы, хранящейся во FLASH-памяти 20, с использованием SRAM-памяти данных 21 управляет приводом осевого вращения и приводом продольной подачи 11 с помощью линий первого GPI/O-порта 24. При этом для управления скоростью вращения вала сервопривода постоянного тока 29 или шагового двигателя 34 могут использоваться широтно-импульсно модулированные сигналы, а для управления приводом продольной подачи 11 может применяться алгоритм бегущей единицы. Ходовым винтом 6 можно управлять также вручную с помощью маховика 9 ручного перемещения каретки 7 при выключенном двигателе привода продольной подачи 11.
Во все время работы привода продольной подачи микроконтроллер 14 опрашивает концевые датчики 15 и 16 с целью предотвращения возможного аварийного контакта каретки 7 с передней 1 или задней 3 траверсами. В случае фиксации блоком управления аварийной ситуации он автоматически блокирует приводы комплекса с помощью блока аварийных выключателей.
Для управления работой комплекса может использоваться как пульт оператора, так и дополнительный выносной пульт, представляющий собой планшетный компьютер, связанный с блоком управления при помощи беспроводного радио-интерфейса интерфейса Bluetooth. Связь с выносным пультом обеспечивается с помощью универсального асинхронного приемопередатчика UART 23 и Bluetooth-модуля 27. Все типовые настройки и режимы работы комплекса, такие как скорость вращения расточной головки или наплавочной штанги, а также скорость перемещения каретки 7 настраиваются и регулируются с помощью упомянутых пультов и могут быть сохранены при необходимости на SD-карте 28 для их дальнейшего использования.
Таким образом, рассмотренный в настоящей заявке расточно-наплавочный комплекс, является универсальным мобильным станком для выполнения как расточных, так и наплавочных операций и может эффективно применяться при ремонте и восстановлении отверстий по месту нахождения техники, включая расточку изношенного отверстия для устранения эллипсности, восстановление изношенного отверстия путем наплавки и расточку отверстия под нужный диаметр.
| название | год | авторы | номер документа |
|---|---|---|---|
| Мобильный расточно-наплавочный станок | 2021 |
|
RU2760350C1 |
| Мобильный расточной станок | 2020 |
|
RU2753848C1 |
| МОБИЛЬНЫЙ НАПЛАВОЧНЫЙ КОМПЛЕКС «САРМАТ НК 450» | 2021 |
|
RU2773541C1 |
| МОБИЛЬНЫЙ РАСТОЧНО-НАПЛАВОЧНЫЙ КОМПЛЕКС | 2009 |
|
RU2421303C2 |
| Мобильный расточной станок | 2021 |
|
RU2760351C1 |
| Комплекс роботизированный медицинский для реабилитации нижних конечностей и механотренажер реабилитационного комплекса для нижних конечностей | 2022 |
|
RU2820327C1 |
| АВТОМАТИЗИРОВАННЫЙ ПОДВИЖНЫЙ СТАНОК | 2020 |
|
RU2752349C1 |
| УЧЕБНЫЙ УНИВЕРСАЛЬНЫЙ СТАНОК ДЛЯ МЕХАНИЧЕСКОЙ ОБРАБОТКИ ДЕТАЛЕЙ | 2023 |
|
RU2816474C1 |
| ОПЫТОВЫЙ МОРСКОЙ МОДУЛЬНЫЙ КОМПЛЕКС | 2021 |
|
RU2760823C1 |
| Способ изготовления внутреннего отверстия в трубе при помощи расточного устройства | 2024 |
|
RU2839745C1 |
Изобретение относится к специализированным расточным станкам и может быть использовано для восстановления или ремонта изделий путем наплавки металла на внутреннюю поверхность их отверстий с дальнейшей расточкой. Комплекс состоит из цанговой передней траверсы с зажимными винтами и задней траверсы, соединенных левой и правой цилиндрическими направляющими, между которыми на ходовом винте установлена разъемная цанговая каретка с зажимными винтами, в которой закреплен привод осевого вращения. Ходовой винт снабжен маховиком ручного перемещения каретки и связан зубчато-ременной передачей с валом двигателя привода продольной подачи, закрепленного на нижнем торце задней траверсы. К приводу осевого вращения и двигателю привода продольной подачи подключены силовые выходы блока управления, выполненного на основе микроконтроллера. На передней и задней траверсах закреплены концевые датчики, выходы которых подключены к измерительным входам блока управления. Обеспечивается повышение точности обработки отверстий. 7 з.п. ф-лы, 4 ил.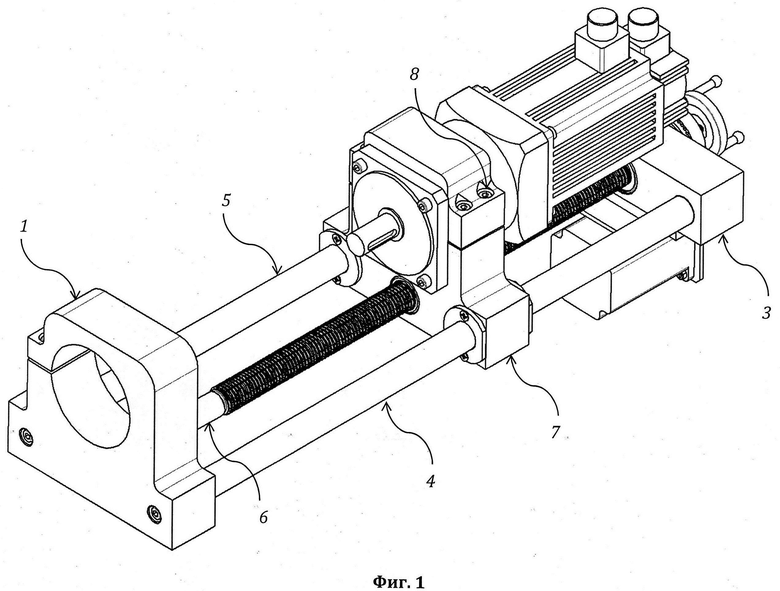
1. Мобильный расточно-наплавочный комплекс, содержащий цанговую переднюю траверсу с зажимными винтами и заднюю траверсу, соединенные левой и правой цилиндрическими направляющими, отличающийся тем, что он снабжен цанговой кареткой с зажимными винтами, установленной между направляющими на ходовом винте и содержащей закрепленный в ней привод осевого вращения, при этом ходовой винт снабжен маховиком ручного перемещения каретки и связан зубчато-ременной передачей с валом двигателя привода продольной подачи, закрепленного на нижнем торце задней траверсы, к приводу осевого вращения и двигателю привода продольной подачи подключены силовые выходы блока управления, выполненного на основе микроконтроллера, а на передней и задней траверсах закреплены концевые датчики, выходы которых подключены к измерительным входам блока управления.
2. Мобильный расточно-наплавочный комплекс по п. 1, отличающийся тем, что цилиндрические направляющие выполнены из калиброванных хромированных штоков.
3. Мобильный расточно-наплавочный комплекс по п. 1, отличающийся тем, что ходовой винт выполнен с трапециевидной резьбой.
4. Мобильный расточно-наплавочный комплекс по п. 1, отличающийся тем, что ходовой винт выполнен с треугольной метрической резьбой.
5. Мобильный расточно-наплавочный комплекс по п. 1, отличающийся тем, что в качестве привода осевого вращения использован сервопривод постоянного тока с двигателем, имеющим планетарный редуктор.
6. Мобильный расточно-наплавочный комплекс по п. 1, отличающийся тем, что в качестве привода осевого вращения использована электродрель.
7. Мобильный расточно-наплавочный комплекс по п. 1, отличающийся тем, что в качестве привода осевого вращения использован наплавочный модуль, содержащий корпус с установленной в нем головкой под наплавочную штангу, соединенной зубчато-ременной передачей с валом шагового двигателя.
8. Мобильный расточно-наплавочный комплекс по п. 1, отличающийся тем, что привод продольной подачи выполнен в виде шагового двигателя.
| МОБИЛЬНЫЙ РАСТОЧНО-НАПЛАВОЧНЫЙ КОМПЛЕКС | 2009 |
|
RU2421303C2 |
| 0 |
|
SU327983A1 | |
| Механический гранулятор кормов | 1961 |
|
SU143305A1 |
| Насос | 1974 |
|
SU979702A1 |

