Область техники, к которой относится изобретение
Изобретение относится к технике механической обработки и может быть использовано в учебном процессе для демонстрации видов механической обработки материалов, а также в опытном и серийном производстве.
Механическая обработка материалов является основным способом изготовления большинства деталей машин. В рамках механической обработки материалов используются токарные, фрезерные, сверлильные и шлифовальные станки, в каждом из которых используется относительное перемещение рабочего инструмента и обрабатываемой заготовки, по крайней мере один из которых вращается.
Как правило, в учебном процессе используются промышленные станки, исполнение которые ориентировано на выполнение функциональных операций без учета потребностей процесса обучения.
Уровень техники
Известны круглошлифовальные станки, например универсальный круглошлифовальный станок (патент SU 1085772 A1 от 1982.07.14), предназначенный для шлифования цилиндрических и конических деталей, содержащий шлифовальную бабку и расположенные на продольном столе бабку изделия с неподвижным центром и шкивом-поводком, связанным с приводным двигателем, и заднюю бабку, снабжен установочно-подвижной в поперечном направлении плитой, закрепленной на столе, а бабка изделия установлена на плите, выполнена поворотной и снабжена связанным с приводным двигателем шпинделем с внутренним конусом, установленным параллельно оси шкива-поводка на расстоянии, равном удвоенному расстоянию от оси шкива-поводка до оси поворота бабки изделия.
К недостаткам данного круглошлифовального станка можно отнести невозможность обработки деталей в различных плоскостях в автоматическом режиме по заданной программе, а также отсутствует возможность выполнения не шлифовальных операций (обрезки заготовки, фрезеровки, сверления и т.д.).
Ближайшим аналогом к заявляемому техническому решению является специальный станок с ЧПУ (патент RU 2463149C1 от 20.01.2011) содержащий станину с направляющими, переднюю бабку с возможностью установки обрабатываемой детали и коробкой подач, главный привод, суппорт с ползушкой и установленным на нем обрабатывающим узлом, заднюю бабку с пинолью и элементами ее перемещения по направляющим станины, отличающийся тем, что он включает измерительный узел, закрепленный на балке, установленной на станине, и состоящий из модуля перемещения, измерительного датчика и сервопривода, обрабатывающий узел, выполненный в виде кронштейна, оснащенного котировочными винтами и закрепленным на нем электрошпинделем с цангой и гайкой для установки шлифовального круга, и частотный преобразователь для управления электрошпинделем, при этом управляющие выходы главного привода, привода суппорта, привода ползушки, частотного преобразователя, измерительного датчика и сервопривода соединены с входами интерфейсных узлов системы ЧПУ.
К недостаткам данного специального станка с ЧПУ можно отнести низкую функциональность станка. Данный станок не обеспечивает обработку поверхностей не вращающегося типа, что обусловлено конструктивным выполнением передней бабки.
Также к недостаткам обоих станков можно отнести высокую стоимость и низкую адаптацию к процессу обучения.
Целью изобретения является получение заготовок заданной формы при обучении процесса производства.
Раскрытие сущности изобретения
Поставленная цель достигается следующим образом.
Станок реализуется в компактном форм-факторе, позволяющем наглядно демонстрировать все элементы процессов механической обработки материалов. Все подвижные элементы станка размещаются на круглом неподвижном основании, закрытом прозрачным защитным куполом, что позволяет демонстрировать процессы механической обработки заготовок во всех ракурсах.
Обрабатываемая заготовка и инструмент имеют по три степени свободы (одна линейная и две вращательных). Устройство управления обеспечивает возможность перемещать заготовку и инструмент относительно друг друга различными вариантами:
- инструмент типа резец линейно перемещается относительно вращающейся заготовки,
- вращающийся инструмент типа фреза линейно перемещается относительно вращающейся заготовки,
- вращающийся инструмент типа сверло линейно перемещается относительно вращающейся заготовки,
- вращающийся инструмент типа шлифовальный круг линейно перемещается относительно вращающейся заготовки,
- вращающийся инструмент типа шлифовальный круг линейно перемещается относительно неподвижной заготовки и др.
Краткое описание чертежей
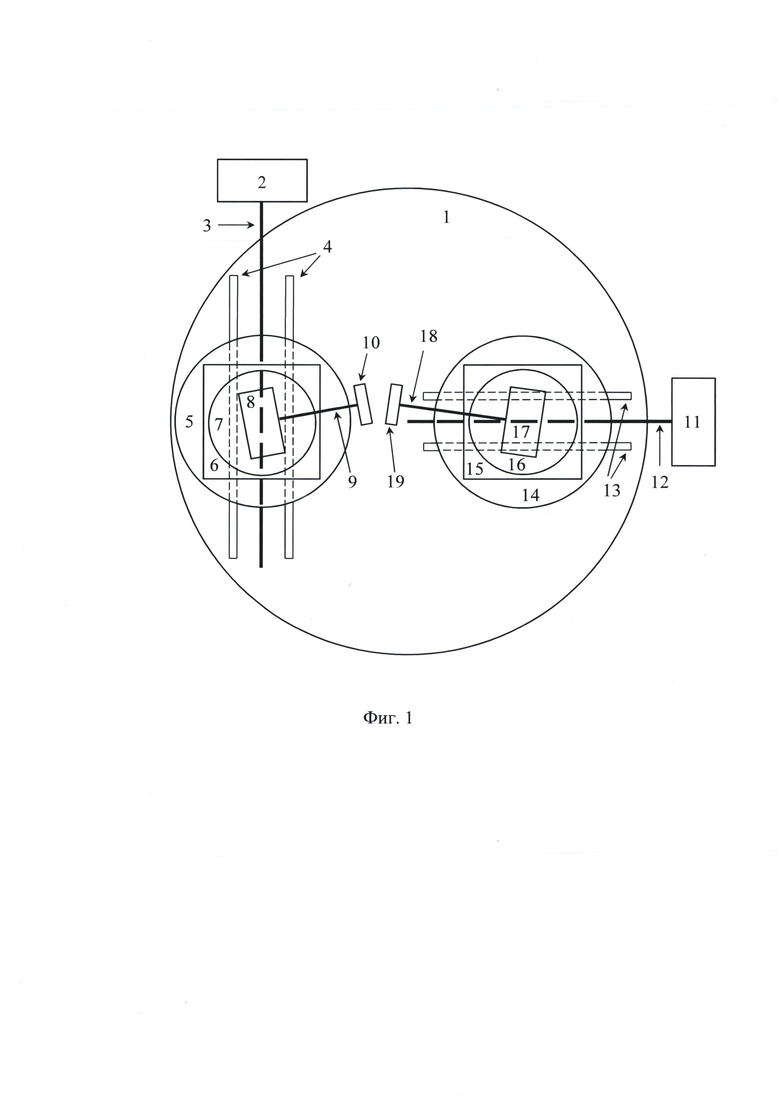
Фиг. 1 - Схема Учебного универсального станка для механической обработки деталей. Показаны основные электрические и механические элементы устройства и связи между ними.
Фиг.2 - Схема Учебного универсального станка для механической обработки деталей. Показана компоновка частей станка.
Фиг. 3 - Схема Учебного универсального станка для механической обработки деталей. Показана схема управления электродвигателями.
Фиг. 4 - Внешний вид экспериментального образца Учебного универсального станка для механической обработки деталей. Показаны основные элементы устройства и связи между ними.
Осуществление изобретения
Устройство содержит:
1 - неподвижное основание,
2 - электродвигатель,
3 - винтовая передача,
4 - линейные направляющие,
5 - подвижная платформа,
6 - электродвигатель,
7 - подвижное основание,
8 - электродвигатель,
9 - вал,
10 - цанговый механизм,
11 - электродвигатель,
12 - винтовая передача,
13 - линейные направляющие,
14 - подвижная платформа,
15 - электродвигатель,
16 - подвижное основание,
17 - электродвигатель,
18 - вал,
19 - цанговый механизм,
20 - модуль управления,
21 - прозрачный защитный кожух,
22 - блок управления электродвигателями,
23 - блок управления,
24 - блок питания.
Функциональная схема Учебного универсального станка для механической обработки деталей представлена на фиг. 1. Компоновка частей Станка представлена на фиг. 2.
Неподвижное основание 1 представляет собой ровную площадку круглой формы, предназначенную для размещения элементов и формирования конструктивной основы станка.
Электродвигатель 2 представляет собой устройство, обеспечивающее вращение винтовой передачи 3.
Винтовая передача 3 представляет собой винт.
Линейные направляющие 4 представляют собой рельсовые направляющие, по которым перемещается Подвижная платформа 5.
Подвижная платформа 5 представляет собой площадку, содержащую гайку, через которую вращательное движение винтовой передачи 3 обеспечивает ее линейное перемещение.
Электродвигатель 6 представляет собой устройство, обеспечивающее поворот подвижного основания 7.
Подвижное основание 7 представляет собой площадку, предназначенную для размещения и поворота электродвигателя 8.
Электродвигатель 8 представляет собой устройство, обеспечивающее вращение вала 9.
Вал 9 представляет собой ось, передающую вращение электромотора на цанговый механизм 10.
Цанговый механизм 10 представляет собой устройство, обеспечивающее крепление инструмента или заготовки к валу 9.
Электродвигатель 11 представляет собой устройство, обеспечивающее вращение винтовой передачи 12.
Винтовая передача 12 представляет собой винт.
Линейные направляющие 13 представляют собой рельсовые направляющие, по которым перемещается Подвижная платформа 14.
Подвижная платформа 14 представляет собой площадку, содержащую гайку, через которую вращательное движение винтовой передачи 12 обеспечивает ее линейное перемещение.
Электродвигатель 15 представляет собой устройство, обеспечивающее поворот подвижного основания 16.
Подвижное основание 16 представляет собой площадку, предназначенную для размещения и поворота электродвигателя 17.
Электродвигатель 17 представляет собой устройство, обеспечивающее вращение вала 18.
Вал 18 представляет собой ось, передающую вращение электродвигателя на цанговый зажим 19.
Цанговый механизм 19 представляет собой устройство, обеспечивающее крепление инструмента или заготовки к валу 18.
Модуль управления 20 представляет собой устройство, предназначенное для формирования управляющих воздействий для электродвигателей станка.
Прозрачный защитный кожух 21 представляет собой полусферический экран, выполненный из прозрачного материала, предназначенный для защиты людей от стружки и пыли, образующихся при работе станка.
Блок управления электродвигателями 22 представляет собой устройство, формирующее питающие токи для электродвигателей 2, 6, 8, 11, 15 и 17.
Блок управления 23 представляет собой устройство, обеспечивающее взаимодействие оператора со станком.
Блок питания 24 представляет собой устройство, формирующее питающие напряжения для всех элементов станка.
Достижение заявленных технических результатов при реализации Учебного универсального станка для механической обработки деталей обеспечивается нижеперечисленными существенными признаками.
Неподвижное основание 1 располагается горизонтально. К Неподвижному основанию 1 крепятся Электрические двигатели 2 и 11, Валы 3 и 12 которых соответственно имеют резьбу и образуют между собой прямой угол. Линейные направляющие 4 и 13 располагаются параллельно валам Винтовых передач 3 и 12 соответственно. На Линейных направляющих 4 и 13 располагаются Подвижные платформы 5 и 14 соответственно. Подвижная платформа 5 соединена с Валом 3 винтовым скользящим соединением. Подвижная платформа 14 соединена с Валом 12 винтовым скользящим соединением. На Подвижных платформах 5 и 14 закреплены вертикально Электродвигатели 6 и 15 соответственно, на которых закреплены Подвижные основания 7 и 16 соответственно, на которых закреплены Электродвигатели 8 и 17 соответственно. На Валу 9 Электродвигателя 8 закреплен Цанговый зажим 10. На Валу 18 Электродвигателя 17 закреплен Цанговый зажим 19.
Модуль управления 20 располагается под Неподвижным основанием 1 и включает в себя Блок управления электродвигателями 22, Блок управления 23 и Блок питания 24.
Прозрачный защитный кожух 21 съемно размещается на Неподвижном основании 1, экранируя зону взаимодействия инструмента и заготовки от персонала.
Блок питания 24 через Блок управления 23 подключен к Блоку управления электродвигателями 22, шесть выходов которого подключены к питающим входам шести Электродвигателей 2, 6, 8, 11, 15 и 17 соответственно. Схема управления электродвигателями представлена на фиг. 3.
Учебный универсальный станок для механической обработки деталей работает следующим образом.
При открытом Прозрачном защитном кожухе 21 оператор закрепляет в Цанговые зажимы 10 и 19 заготовку и инструмент, после чего Прозрачный защитный кожух 21 закрывается для безопасности персонала.
Блок питания 24 формирует напряжение питания, которое поступает через Блок управления 23 на Блок управления электродвигателями 22, который формирует питающие напряжения для Электродвигателей. Блок управления 23 под управлением оператора обеспечивает формирование сигналов управления для подачи питания на каждый Электродвигатель станка. При подаче питания на Элекродвигатели 2 и 11 вращательное движение Валов 3 и 13 обеспечивает линейное перемещение Подвижных платформ 5 и 14 соответственно. При подаче питания на Элекродвигатели 6 и 15 происходит вращательное движение Подвижных оснований 7 и 16 соответственно. При подаче питания на Элекродвигатели 8 и 17 вращательное движение Валов 9 и 18 обеспечивает вращение закрепленных в Цанговых зажимах 10 и 18 инструмента и заготовки.
В зависимости от решаемой задачи станок обеспечивает возможность перемещать заготовку и инструмент относительно друг друга различными способами:
- инструмент типа резец линейно перемещается относительно вращающейся заготовки - имитация токарного станка;
- вращающийся инструмент типа фреза линейно перемещается относительно невращающейся заготовки - имитация фрезерного станка;
- вращающийся инструмент типа сверло линейно перемещается относительно невращающейся заготовки - имитация сверлильного станка;
- вращающийся инструмент типа шлифовальный круг линейно перемещается относительно вращающейся заготовки - имитация шлифовального станка и др.
Вращение Подвижных платформ 7 и 16 обеспечивает возможность выполнения фасонных работ, например, снятия фаски.
Заданные значения параметров режима работы станка вводятся оператором через Блок управления 23.
Заложенные принципы позволяют усовершенствовать Станок в направлении автоматизации операций путем составления программ управления двигателями.
Таким образом, цель изобретения достигнута.
Стендовая проверка работоспособности заявленного устройства подтвердила его способность решать поставленную задачу. При реализации стенда в качестве его элементов использованы:
1 - полимерное основание диаметром 40 см,
2 - шаговый двигатель типа NEMA17,
3 - шариковая-винтовая передача 0802,
4 - линейные направляющие MGN9,
5 - подвижная платформа, изготовленная по технологии 3D-печати,
6 - шаговый двигатель плоского типа,
7 - подвижное основание, изготовленное по технологии 3D-печати,
8 - шаговый двигатель NEMA23,
9 - вал шпинделя с конусом для цанги ER11,
10 - цанговый механизм ER11,
11 - шаговый двигатель типа NEMA17,
12 - шариковая-винтовая передача 0802,
13 - линейные направляющие MGN9,
14 - подвижная платформа, изготовленная по технологии 3D-печати,
15 - шаговый двигатель плоского типа,
16 - подвижное основание, изготовленное по технологии 3D-печати,
17 - шаговый двигатель с полым валом типа NEMA23,
18 - вал шпинделя,
19 - кулачковый патрон 60 мм,
20 - модуль управления,
21 - прозрачный защитный кожух,
22 - драйверы управления шаговыми двигателями ТМС2208, DM556,
23 - блок управления (контроллер),
24 - универсальный блок питания.
Внешний вид экспериментального образца Учебного универсального станка для механической обработки деталей приведен на фиг. 4.
Экспериментальный образец Учебного универсального станка для механической обработки деталей позволяет выполнить комплекс работ по настройке оборудования и провести обучающие и тренировочные занятия с персоналом.
| название | год | авторы | номер документа |
|---|---|---|---|
| ФРЕЗЕРНЫЙ СТАНОК | 2019 |
|
RU2705482C1 |
| УНИВЕРСАЛЬНЫЙ ДЕРЕВООБРАБАТЫВАЮЩИЙ СТАНОК | 1994 |
|
RU2064860C1 |
| АВТОМАТИЗИРОВАННЫЙ ПОДВИЖНЫЙ СТАНОК | 2020 |
|
RU2752349C1 |
| КОМПЛЕКС ДЛЯ ОБРАБОТКИ РАДИУСНЫХ ПОВЕРХНОСТЕЙ КРУПНОГАБАРИТНЫХ ЛИСТОВЫХ ЗАГОТОВОК | 2007 |
|
RU2360770C2 |
| СПОСОБ МЕХАНИЧЕСКОЙ ОБРАБОТКИ АСИММЕТРИЧНОЙ ЗАГОТОВКИ С ОДНОЙ УСТАНОВКИ, СТАНОК И УСТРОЙСТВО ДЛЯ ЗАКРЕПЛЕНИЯ ЗАГОТОВКИ | 2013 |
|
RU2600685C1 |
| КРУГЛОПИЛЬНЫЙ СТАНОК ДЛЯ ПРОДОЛЬНОЙ РАСПИЛОВКИ | 2000 |
|
RU2186674C2 |
| НАСТОЛЬНЫЙ ФРЕЗЕРНЫЙ СТАНОК | 2023 |
|
RU2819772C1 |
| КОМБИНИРОВАННЫЙ ДЕРЕВООБРАБАТЫВАЮЩИЙ СТАНОК | 1992 |
|
RU2044627C1 |
| Комбинированный деревообрабатывающий станок | 2024 |
|
RU2830037C1 |
| Станок для точения фланцев | 2021 |
|
RU2780213C1 |



Изобретение относится к машиностроению и может быть использовано в учебном процессе для демонстрации видов механической обработки материалов, а также в опытном и серийном производстве. Станок содержит горизонтально расположенное неподвижное основание, электродвигатели, модуль управления и инструменты для механической обработки и выполнен с возможностью обеспечения обрабатываемой детали и инструменту по три степени свободы. Станок содержит шесть электродвигателей и снабжен съемно размещенным на неподвижном основании прозрачным защитным кожухом. Блок управления станка обеспечивает формирование сигналов управления для подачи питания на указанные электродвигатели. Блок питания через блок управления подключен к блоку управления электродвигателями, шесть выходов которого подключены к питающим входам указанных шести электродвигателей. В качестве инструмента для механической обработки использованы резец, фреза, сверло или шлифовальный круг. Обеспечивается обработка заготовок заданной формы при обучении процессам производства. 4 ил.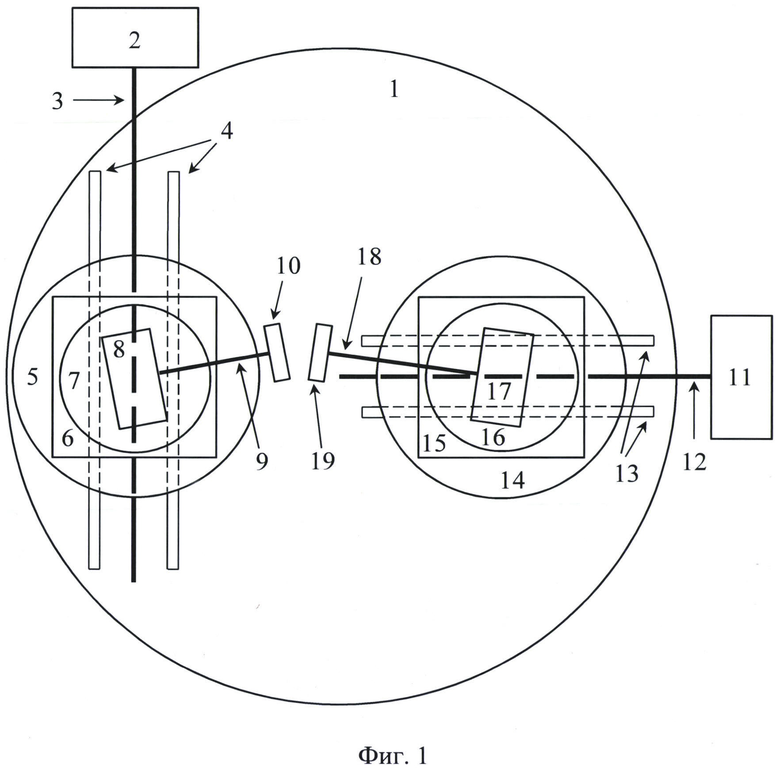
Учебный универсальный станок для механической обработки деталей, содержащий горизонтально расположенное неподвижное основание 1, электродвигатели, модуль управления 20 и инструменты для механической обработки, отличающийся тем, что он выполнен с возможностью обеспечения обрабатываемой детали и инструменту по три степени свободы, содержит шесть электродвигателей 2, 6, 8, 11, 15 и 17 и снабжен съемно размещенным на неподвижном основании 1 прозрачным защитным кожухом 21, линейными направляющими 4 и 13, подвижными платформами 5 и 14, расположенными соответственно на указанных линейных направляющих 4 и 13, цанговыми механизмами 10 и 19, закрепленными на валах 9 и 18 электродвигателей 8 и 17 соответственно и обеспечивающими закрепление инструментов для механической обработки и детали на указанных валах 9 и 18, винтовыми передачами 3 и 12, расположенными с возможностью вращения от электродвигателей 2 и 11 соответственно и образующими между ними собой прямой угол, и подвижными основаниями 7 и 16, закрепленными на электродвигателях 6 и 15 соответственно, при этом электродвигатели 2 и 11 закреплены к неподвижному основанию 1 с образованием между их валами прямого угла, электродвигатели 6 и 15 вертикально закреплены на указанных подвижных платформах 5 и 14 соответственно, а линейные направляющие 4 и 13 расположены параллельно валам указанных винтовых передач 3 и 12, соединенных с подвижными платформами 5 и 14 винтовыми скользящими соединениями, при этом указанный модуль управления 20 расположен под неподвижным основанием 1 и включает блок управления 22 электродвигателями, блок управления 23, обеспечивающий формирование сигналов управления для подачи питания на указанные электродвигатели, и блок питания 24, причем указанный блок питания 24 через блок управления 23 подключен к блоку управления 22 электродвигателями, шесть выходов которого подключены к питающим входам указанных шести электродвигателей 2, 6, 8, 11, 15 и 17 соответственно, а в качестве инструмента для механической обработки использованы резец, фреза, сверло или шлифовальный круг.
| Карбуратор для двигателей внутреннего горения | 1935 |
|
SU49640A1 |
| Аппарат для контроля очистки почтовых ящиков | 1933 |
|
SU35457A1 |
| Упорное приспособление для подъемно-опускной стрелы экскаватора | 1938 |
|
SU54453A1 |
| Катодный усилитель с промежуточными контурами и батарейным коммутатором для цепей сетки | 1923 |
|
SU404A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Прибор с двумя призмами | 1917 |
|
SU27A1 |
| CN 200993823 Y, 19.12.2007. | |||

