Изобретение относится к области безопасности полетов и может быть использовано в бортовых системах обеспечения безопасности полета воздушных судов военного назначения для снижения потерь, связанных с воздействием различных источников и носителей опасности, включая боевые опасные факторы.
Успешное применение авиации при выполнении боевых задач во многом определяется выполнением боевого маневрирования, сопровождающегося повышенной нагрузкой на систему «Экипаж - воздушное судно», что характеризуется сложностью принятия решения при возникновении особых ситуаций в полете. Возникновение особой ситуации связано не только с воздействием боевых (средства противодействия противника), но также и небоевых опасных факторов, таких как отказы авиационной техники, внешние неблагоприятные воздействия и ошибочные действия экипажей, среди которых основную долю занимают ошибочные действия экипажей (см. Концепция безопасности полетов авиации вооруженных сил Российской Федерации. - М: МО РФ, 2017. - 19 с.), что влечет за собой снижение собственных защитных свойств эргатической системы «Экипаж - воздушное судно» и как следствие приводит к ее гибели. В таких случаях необходимо предупредить развитие особой ситуации, вызванной влиянием всей совокупности опасных факторов, а при возникновении особой ситуации устранить таким наименее опасным способом, чтобы обеспечить выполнение боевой задачи.
Известен способ управления воздушным судном, реализованный бортовой активной системой безопасности полетов (см. Воеводин B.C. Бортовая активная система безопасности полетов ИКСЛ-2 / B.C. Воеводин, Е.Л. Дорофеев, А.В. Капустин, Ю.А. Янышев, М.В. Дворников, В.А. Сухолитко // Мехатроника. - 2000. - № 5. - С.19-21), предназначенный для предотвращения аварийных ситуаций и спасения летчика и самолета при временной потере работоспособности экипажа. Недостатком является то, что при функционировании системы учитываются не все опасные факторы, действующие в текущей ситуации.
Известны способы управления воздушным судном, реализованные в системах предупреждения критических режимов полета (см. Авиационные приборы и системы / Г.И. Клюев, Н.Н. Макаров, В.М. Солдаткин. Учебное пособие. - Ульяновск.: УлГТУ, 2000. - 343 с.), повышающие уровень безопасности полета путем предупреждения выхода пилотируемого летательного аппарата на критические режимы полета. Недостатками известных способов является их ограниченность по функциональным возможностям, поскольку управляющие воздействия осуществляются только для предупреждения особых ситуаций и не реализуются при непосредственном их возникновении, а задача повышения безопасности полета решается без учета применения в условиях боевых действий. Для военной авиации безопасность полетов необходимо рассматривать с учетом целевого предназначения системы «Экипаж - воздушное судно» по выполнению боевых задач.
Известен способ управления воздушным судном, реализованный в бортовой активной системе обеспечения безопасности полетов (см. пат. 2223542 РФ, МПК G06F 19/00, G05D 1/10. Бортовая активная система безопасности полетов [Текст] / В.А. Сухолитко; заявитель и патентообладатель Сухолитко В.А. - № 2001120922/09; заявл. 27.07.2001; опубл. 10.02.2004. - 5 с.: ил.), содержащей блоки анализа и управления, блоки функциональных измерителей, биомедицинских параметров, контроля бортового оборудования, предназначенная для контроля, управления, спасения, летательного аппарата и экипажа. Однако данная система не обеспечивает контроль, управление и спасение летательного аппарата и экипажа при влиянии ошибочных действий экипажа и возврат на заданную траекторию полета.
Наиболее близким по технической сущности является способ управления воздушным судном с использованием бортовой комплексной системы обеспечения безопасности полета (см. Жмеренецкий В.Ф. Активное обеспечение безопасности полета летательного аппарата: методология, модели, алгоритмы / В.Ф. Жмеренецкий, К.Д. Полулях, О.Ф. Акбашев. М.: ЛЕНАНД, 2014. 320 с.), принятый за прототип.
Способ-прототип основан на определении параметров вектора собственного состояния воздушного судна и внешней среды, определении вероятности гибели системы «Экипаж - воздушное судно» при выполнении полетного задания, выборе наименее опасной траектории выполнения полетного задания и формировании управляющих воздействий на управляющие системы. Вероятность гибели системы «Экипаж - воздушное судно» определяется как функция вероятности гибели от возникновения авиационного происшествия - РгБЗП и суммарной вероятности гибели из-за воздействия боевых опасных факторов (средств поражения ПВО противника) различного типа - РГПВО и представлена выражением РГ=ƒ(РгБЗП, РГПВО). Вероятность гибели по причине авиационного происшествия представлена зависимостью вида:
РгБЗП=ƒ(РГот, ΡГNy, ΡГQ, ΡГПС, ΡГрельеф),
где РГот - вероятность гибели из-за отказа техники; РгNy - вероятность гибели из-за превышения ограничений по вертикальной перегрузке Ny; РГа - вероятность гибели из-за превышения ограничений по углу атаки; РГпс - вероятность гибели из-за потери сознания летчиком; РΓрельеф - вероятность гибели из-за столкновения с рельефом местности.
Недостатком данного способа является то, что способ учитывает не в полном объеме регламентированные руководящими документами опасные факторы полета (см. Приложение 7. Правила расследования авиационных происшествий и авиационных инцидентов с государственными воздушными судами в Российской Федерации. М: ЦЕНТРМАГ, 2019. 94 с.), связанные с ошибочными действиями экипажа (за исключением вероятностей выхода за ограничения по углу атаки и вертикальной перегрузке, характеризующих только продольный канал управления самолетом), что характеризуется недостаточным уровнем собственных защитных свойств эргатической системы «Экипаж - воздушное судно».
Техническим результатом изобретения является повышение безопасности полета воздушного судна военного назначения, выраженное в усилении собственных защитных свойств эргатической системы «Экипаж - воздушное судно».
Указанный технический результат достигается тем, что в способе управления воздушным судном с использованием бортовой комплексной системы обеспечения безопасности полета, основанном на определении параметров вектора собственного состояния воздушного судна и внешней среды, определении вероятности гибели системы «Экипаж - воздушное судно», согласно изобретению, дополнительно определяют параметры, характеризующие положение органов управления воздушным судном, анализируют соответствие параметров органов управления вектору собственного состояния и режиму полета, рассчитывают общую вероятность ошибочных действий экипажа и на ее основании уточняют вероятность гибели системы «Экипаж - воздушное судно», рассчитывают вероятность выполнения боевой задачи и выбирают эффективную траекторию выполнения полетного задания, сравнивают текущую траекторию с эффективной траекторией, и если текущая траектория не соответствует эффективной, то сравнивают значение вероятности гибели РГ с вероятностями возникновения особых ситуаций в полете:
ΡГ>Рас - катастрофическая ситуация;
РАС≥РГ>Рсс - аварийная ситуация;
Рсс≥РГ>Рууп - сложная ситуация;
Рууп≥РГ>Рнуп - усложнение условий полета, где РАС - вероятность возникновения аварийной ситуаций, Рсс - вероятность возникновения сложной ситуаций, Рууп - вероятность усложнения условий полета, Рнуп - вероятность возникновения нормальных условий полета, и если выполняется условие РГ>РАС, то выдают сигнал на выполнение действий по спасению экипажа, а в остальных случаях формируют управляющие воздействия на исполнительные системы, обеспечивающие устранение особых ситуаций.
Сущность изобретения заключается в том, что дополнительно определяют параметры, характеризующие положение органов управления воздушным судном, анализируют соответствие параметров органов управления вектору собственного состояния и режиму полета, рассчитывают общую вероятность ошибочных действий экипажа и на ее основании уточняют вероятность гибели системы «Экипаж - воздушное судно», рассчитывают вероятность выполнения боевой задачи и выбирают эффективную траекторию выполнения полетного задания, сравнивают текущую траекторию с эффективной траекторией, и если текущая траектория не соответствует эффективной, то сравнивают значение вероятности гибели РГ с вероятностями возникновения особых ситуаций в полете:
ΡГ>Рас - катастрофическая ситуация;
РАС≥РГ>Рсс - аварийная ситуация;
Рсс≥РГ>РууП - сложная ситуация;
Рууп≥РГ>Рнуп - усложнение условий полета,
где РАС - вероятность возникновения аварийной ситуаций, Рсс - вероятность возникновения сложной ситуаций, Рууп - вероятность усложнения условий полета, Рнуп - вероятность возникновения нормальных условий полета, и если выполняется условие РГ>РАС, то выдают сигнал на выполнение действий по спасению экипажа, в остальных случаях формируют управляющие воздействия на исполнительные системы, обеспечивающие устранение особых ситуаций, что позволяет выполнить боевую задачу в условиях воздействия опасных факторов наиболее безопасным способом, а при необходимости обеспечить спасение экипажа. Этим достигается повышение безопасности полета воздушного судна военного назначения, выраженное в усилении собственных защитных свойств эргатической системы «Экипаж - воздушное судно».
Анализ соответствия параметров органов управления вектору собственного состояния и режиму полета выполняют путем сравнения фактических значений параметров, полученных от объекта управления, и номинальных значений параметров для заданного режима функционирования воздушного судна (см. Безопасность полетов: учебник / под ред. А.В. Головнева. - Воронеж.: ВУНЦ ВВС «ВВА», 2018. - 404 с.; или пат. 2223542 РФ, МПК G06F 19/00, G05D 1/10. Бортовая активная система безопасности полетов [Текст] / В.А. Сухолитко; заявитель и патентообладатель Сухолитко В.А. - № 2001120922/09; заявл. 27.07.2001; опубл. 10.02.2004. - 5 с.: ил.).
Общая вероятность ошибочных действий экипажа Родэ рассчитывается как функция частных показателей, учитывающих весь комплекс опасных факторов полета, связанных с ошибочными действиями экипажа, установленных руководящими документами (см. Приложение 7. Правила расследования авиационных происшествий и авиационных инцидентов с государственными воздушными судами в Российской Федерации. М: ЦЕНТРМАГ, 2019. 94 с.), нарушениями порядка и правил выполнения полетного задания; ошибками в технике пилотирования; ошибками экипажа в эксплуатации авиационной техники: Родэ=ƒ(РОПЗ, Ртп, РЭАТ), где РоПЗ - вероятность нарушений порядка и правил выполнения полетного задания; Ртп - вероятность ошибок в технике пилотирования; РЭАТ - вероятность ошибок в эксплуатации авиационной техники. Вероятность ошибочных действий экипажа по каждому опасному фактору РОПЗ, РТП, РЭАТ может быть определена, например, зависимостью  (см. Справочник по инженерной психологии / Под ред. Б.Ф. Ломова. - М.: Машиностроение, 1982. - 368 с.), где КЗ - коэффициент загрузки экипажа; А, В, С - эмпирические коэффициенты, характеризующие соответственно усталость, адаптивность, устойчивость работоспособности и влияние рабочей среды, рассчитываемые с учетом выполняемых действий; β - поправочный коэффициент, учитывающий соответствующие ошибочные действия в деятельности экипажа.
(см. Справочник по инженерной психологии / Под ред. Б.Ф. Ломова. - М.: Машиностроение, 1982. - 368 с.), где КЗ - коэффициент загрузки экипажа; А, В, С - эмпирические коэффициенты, характеризующие соответственно усталость, адаптивность, устойчивость работоспособности и влияние рабочей среды, рассчитываемые с учетом выполняемых действий; β - поправочный коэффициент, учитывающий соответствующие ошибочные действия в деятельности экипажа.
Уточнение вероятности гибели системы «Экипаж - воздушное судно» выполняют путем дополнительного введения в выражение вероятности гибели системы «Экипаж - воздушное судно» общей вероятности ошибочных действий экипажа, представленной функцией частных показателей, учитывающих весь комплекс опасных факторов полета, связанных с ошибочными действиями экипажа, установленных руководящими документами (см. Приложение 7. Правила расследования авиационных происшествий и авиационных инцидентов с государственными воздушными судами в Российской Федерации. М: ЦЕНТРМАГ, 2019. 94 с.).
Расчет вероятности выполнения боевой задачи может быть выполнен, например, в зависимости от типа цели и характера выполняемых системой «Экипаж - воздушное судно» задач и может быть рассчитана исходя из выполнения истребительных, ударных, разведывательных и других задач (см. Боевые авиационные комплексы и их эффективность: учебник для слушателей и курсантов инженерных ВУЗов ВВС / Под ред. О.В. Болховитинова. - М.: Изд. ВВИА им. проф. Н.Е. Жуковского, 2008. - 224 с.).
Выбор эффективной траектории выполнения полетного задания осуществляют путем определения траектории достижения цели, обеспечивающей минимальное значение вероятности гибели системы «Экипаж - воздушное судно» с учетом гарантированного выполнения боевой задачи.
Сравнение текущей траектории с эффективной траекторией выполняют путем определения рассогласования текущих координат местоположения воздушного судна, определяемых датчиками параметров собственного состояния воздушного судна (в пилотажно-навигационном комплексе), с расчетными координатами, например, для геоцентрической системы координат отклонения широты Δϕ, долготы Δλ и высоты ΔН относительно земной поверхности (см. Боевое применение и эффективность пилотажно-навигационных комплексов летательных аппаратов: учебник / Под ред. А.А. Красовского. - М.: Изд. ВВИА им. проф. Н.Е. Жуковского, 1989. - 288 с.).
Сравнение вероятности гибели Рг с вероятностями возникновения особых ситуаций: Рг>РАС; РАС≥Рг>Рсс; Рсс≥Рг>Рууп; Рууп≥Рг>РНУП выполняют путем последовательного сравнения текущего значения вероятности гибели системы «Экипаж - воздушное судно» с заданными значениями вероятностей аварийной ситуации, сложной ситуации, усложнения условий полета и нормальных условий полета, определяемых в соответствии с требованиями безопасности полетов и нормами летной годности для различных типов воздушных судов, например, в соответствии с Авиационными правилами. Ч. 25. Нормы летной годности самолетов транспортной категории. М.: Изд. Международного авиационного комитета, 1994. 321 с.
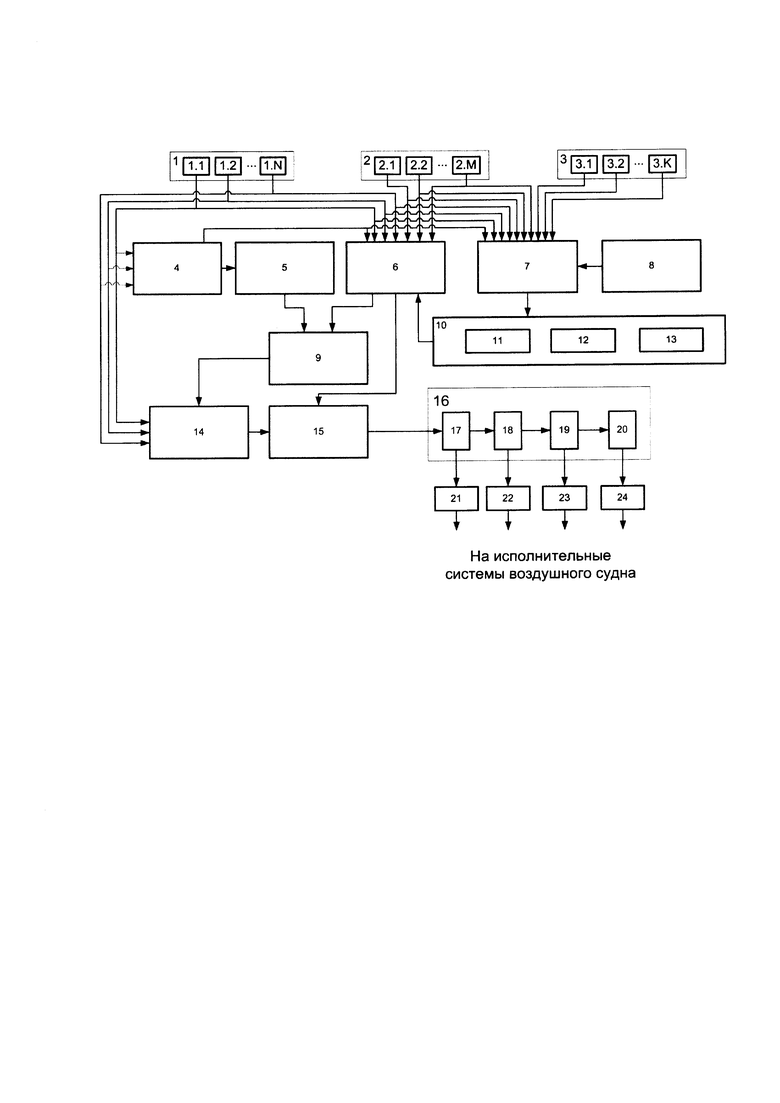
Способ управления воздушным судном при боевом маневрировании может быть реализован с помощью устройства, структурная схема которого представлена на фигуре, где обозначено: 1 - датчики определения параметров собственного состояния воздушного судна; 2 - датчики определения параметров внешней среды; 3 - датчики параметров органов управления; 4 - блок полетного задания; 5 - блок расчета вероятности выполнения боевой задачи; 6 - блок расчета вероятности гибели; 7 - блок анализа ошибочных действий экипажа; 8 - блок режимов полета; 9 - блок определения эффективной траектории; 10 - блок расчета общей вероятности ошибочных действий экипажа; 11 - блок расчета вероятности нарушений порядка и правил выполнения полетного задания; 12 - блок расчета вероятности ошибок в технике пилотирования; 13 - блок расчета вероятности ошибок экипажа в эксплуатации авиационной техники; 14 - блок сравнения траекторий; 15 - ключевая схема; 16 - блок проверки особых ситуаций; 17 - блок проверки условия Рг>РАС; 18 - блок проверки условия РАС≥Рг>Рсс; 19 - блок проверки условия Рсс≥Рг>РУУП; 20 - блок проверки условия Рууп≥Рг>Рнуп; 21 - блок формирования управляющих воздействий по спасению экипажа; 22 - блок формирования управляющих воздействий по устранению аварийной ситуации; 23 - блок формирования управляющих воздействий по устранению сложной ситуации; 24 - блок формирования управляющих воздействий по устранению усложнения условий полета.
Блок датчиков параметров органов управления 3 предназначен для выдачи актуальной информации о состоянии и параметрах органов управления и может быть выполнен, например, с использованием бортовых датчиков положения кнопок, переключателей, тумблеров на пультах кабины экипажа, ручки управления самолетом, ручки уборки-выпуска шасси, аварийного сброса фонаря и т.д., например, бесконтактные датчики integral Health Monitoring фирмы Honeywell (см. Honeywell.com/en-us/industries/aerospace) или датчики, используемые в бортовых активных системах безопасности полетов БАСБП-130, ИКСЛ-2 (см. пат. 2150886 РФ, МПК А61В 5/16, А61В 5/18, G09B 9/08, G09B 9/10, G09B 9/28. Способ контроля и управления функциональным состоянием летчика в полете и устройство для осуществления способа [Текст] / В.А. Сухолитко; заявитель и патентообладатель Сухолитко В.А. - № 99114971/28; заявл. 08.07.1999; опубл. 20.06.2000. - 8 с.: ил.).
Блоки 4…24 могут быть выполнены, например, на платформе, интегрированной модульной авионики (см. Федосов Е.А., Косьянчук В.В., Сельвесюк Н.И. Интегрированная модульная авионика // Радиоэлектронные технологии 2015. № 1. С.66-71. URL: https://gosniias.ru/pages/d/ret-01-2015_1.pdf).
Блок полетного задания 4 предназначен для выдачи в блоки 5, 6, 7, информации о текущем полетном задании, включая информацию о целях управления, боевых и небоевых источниках и носителях опасности, данных разведки, запасных аэродромах и т.д., которые вводят непосредственно при подготовке к вылету.
Блок 5 предназначен для выдачи в блок определения эффективной траектории 9 информации о вероятности выполнения боевой задачи, рассчитанной исходя из выполнения истребительных, ударных, разведывательных и других задач (см. Боевые авиационные комплексы и их эффективность: учебник для слушателей и курсантов инженерных ВУЗов ВВС / Под ред. О.В. Болховитинова. - М.: Изд. ВВИА им. проф. Н.Е. Жуковского, 2008. - 224 с.).
Блок анализа ошибочных действий экипажа 7 предназначен для определения ошибочных действий экипажа путем сравнения фактических значений параметров, полученных от объекта управления - блоки 1, 2, 3, 4 и номинальных значений параметров для заданного режима функционирования воздушного судна, определяемых в блоке 8 режимов полета.
Блок режимов полета 8 предназначен для хранения и выдачи в блок 7 номинальных значений параметров и их допусков, соответствующих заданному режиму полета и может быть выполнен в виде банка данных параметров, определяемых эмпирическим путем в ходе испытаний авиационной техники или полученных на основе моделирования.
Блок определения эффективной траектории 9 предназначен для определения и выдачи в блок 14 эффективной траектории выполнения полетного задания.
Блок 10 предназначен для расчета и выдачи в блок расчета вероятности гибели 6 общей вероятности ошибочных действий экипажа, учитывающих комплекс опасных факторов полета, связанных с ошибочными действиями экипажа при выполнении полетного задания (см. Приложение 7. Правила расследования авиационных происшествий и авиационных инцидентов с государственными воздушными судами в Российской Федерации. М: ЦЕНТРМАГ, 2019. 94 с.).
Блоки 11, 12, 13 предназначены для расчета частных вероятностей: вероятности нарушений порядка и правил выполнения полетного задания, вероятности ошибок в технике пилотирования, вероятности ошибок в эксплуатации авиационной техники.
Блок 14 сравнения траекторий предназначен для сравнения текущей траектории с эффективной путем определения рассогласования текущих координат местоположения воздушного судна с расчетными координатами и выдачи сигнала управления на ключевую схему 15.
Ключевая схема 15 предназначена для подачи текущего значения вероятности гибели системы «Экипаж - воздушное судно» в блок проверки особых ситуаций 16 при наличии сигнала управления (от блока 14 сравнения траектории).
Блок 16 проверки особых ситуаций содержит блок 17 проверки условия Рг>РАС, блок 18 проверки условия РАС≥Рг>Рсс, блок 19 проверки условия Рсс≥Рг>Рууп, блок 20 проверки условия Рууп≥Рг>Рнуп.
Блок 17 проверки условия Рг>ΡАС предназначен для определения катастрофической ситуации и выдачи сигнала на выполнение действий по спасению экипажа.
Блок 18 проверки условия РАС≥Рг>Рсс предназначен для определения аварийной ситуации и выдачи сигнала на формирование управляющих воздействий по устранению аварийной ситуации.
Блок 19 проверки условия РСС≥Рг>РУУП предназначен для определения сложной ситуации и выдачи сигнала на формирование управляющих воздействий по устранению сложной ситуации.
Блок 20 проверки условия Рууп≥Рг>Рнуп предназначен для определения усложнения условий полета и выдачи сигнала на формирование управляющих воздействий по устранению усложнения условий полета.
Блоки 21, 22, 23, 24 предназначены для формирования управляющих воздействий на исполнительные системы воздушного судна с целью устранения особых ситуаций, например, при возникновении катастрофической ситуации выдают звуковую и световую сигнализацию, речевое предупреждение экипажу о катастрофической ситуации, приводят в действие систему аварийного покидания самолета, выдают тревожное сообщение на командный пункт через бортовую радиостанцию. При возникновении аварийной ситуации выполняют индикацию, звуковую и световую сигнализацию, речевое предупреждение экипажа об аварийной ситуации, обеспечивают своевременное включение экипажа или средств автоматики в контур управления по выводу воздушного судна из опасной зоны путем корректировки параметров или изменения режима полета (см. Макаров Н.Н. Системы обеспечения безопасности функционирования бортового эргатического комплекса: теория, проектирование, применение / под ред. док. техн. наук В.М. Солдаткина. - М: Машиностроение / Машиностроение-Полет, 2009. - 760 с.).
Работа устройства заключается в следующем - с датчиков определения параметров собственного состояния воздушного судна 1, датчиков определения параметров внешней среды 2 непрерывно поступает информация в блок 6 расчета вероятности гибели и блок 7 анализа ошибочных действий экипажа, в который дополнительно поступает информация с датчиков параметров органов управления 3. В блоке 7 анализируют соответствие значений параметров положения органов управления и вектора собственного состояния воздушного судна режиму полета (от блока 8 режимов полета) и передают в блок 10 ошибочных действий экипажа. В блоке 10 рассчитывают вероятности: нарушений порядка и правил выполнения полетного задания в блоке 11, ошибок в технике пилотирования в блоке 12, вероятность ошибок в эксплуатации авиационной техники в блоке 13 и общую вероятность ошибочных действий экипажа, которую по каналам связи передают в блок 6 для уточнения вероятности гибели системы «Экипаж - воздушное судно». В блоке 5 рассчитывают вероятность выполнения боевой задачи на основании информации о текущем местоположении (от блока 1 датчиков определения параметров собственного состояния воздушного судна) и информации о полетном задании (от блока 4 полетного задания). На основании полученной информации о вероятности выполнения боевой задачи (от блока 5) и вероятности гибели (от блока 6) в блоке 9 определяют эффективную траекторию выполнения полетного задания и выдают расчетное значение траектории в блок 14 сравнения траекторий, в котором сравнивают текущую траекторию с расчетной и при отсутствии рассогласования траекторий выполняют полет в штатном режиме, при наличии рассогласования - выдают сигнал на ключевую схему 15 о проверке в блоке 16 соответствия текущего значения вероятности гибели (от блока 6) вероятностям возникновения особых ситуаций в полете. В блоке 16 последовательно выполняют проверку условий: в блоке 17 выполняют проверку условия Рг>РАС, и если выполняется условие, то ситуация соответствует катастрофической и выдают сигнал в блок 21, в котором формируют управляющие воздействия по спасению экипажа на исполнительные системы воздушного судна; если условие не выполняется, то в блоке 18 выполняют проверку условия РАС≥Рг>Рсс, и если выполняется условие, то ситуация соответствует аварийной и выдают сигнал в блок 22, в котором формируют управляющие воздействия по устранению аварийной ситуации на исполнительные системы воздушного судна; если условие не выполняется, то в блоке 19 выполняют проверку условия Рсс≥Рг>Рууп, и если выполняется условие, то ситуация соответствует сложной и выдают сигнал в блок 23, в котором формируют управляющие воздействия по устранению сложной ситуации на исполнительные системы воздушного судна; если условие не выполняется, то в блоке 20 выполняют проверку условия РУУП≥Рг>Рнуп, и если выполняется условие, то ситуация соответствует усложнению условий полета и выдают сигнал в блок 24, в котором формируют управляющие воздействия на исполнительные системы воздушного судна по устранению усложнения условий полета, если условие не выполняется, то ситуация соответствует нормальным условиям полета и полет продолжается в штатном режиме.
Предлагаемое техническое решение является новым, поскольку из общедоступных сведений не известен способ управления воздушным судном при боевом маневрировании, учитывающий максимально полный комплекс опасных факторов полета, связанных с воздействием различных источников и носителей опасности, включая ошибочные действия экипажа, регламентированные руководящими документами и оценивающий боевую эффективность эргатической системы «Экипаж - воздушное судно» в процессе выполнения полетного задания.
Предлагаемое техническое решение имеет изобретательский уровень, поскольку из опубликованных научных данных и известных технических решений явным образом не следует, что заявленная последовательность операций приводит к повышению безопасности полета воздушного судна военного назначения, выраженное в усилении собственных защитных свойств эргатической системы «Экипаж - воздушное судно».
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ МАЛОВЫСОТНЫМ ПОЛЕТОМ ЛЕТАТЕЛЬНОГО АППАРАТА В ВЕРТИКАЛЬНОЙ ПЛОСКОСТИ | 2023 |
|
RU2822805C1 |
| СПОСОБ УСТРАНЕНИЯ ОСОБОЙ СИТУАЦИИ ПРИ РАЗГЕРМЕТИЗАЦИИ КАБИНЫ САМОЛЕТА | 2017 |
|
RU2694954C2 |
| Способ интеллектуальной поддержки экипажа | 2020 |
|
RU2767406C1 |
| СПОСОБ ОЦЕНКИ И АНАЛИЗА ТЕХНИКИ ПИЛОТИРОВАНИЯ ПО ДАННЫМ БОРТОВЫХ УСТРОЙСТВ РЕГИСТРАЦИИ ПАРАМЕТРИЧЕСКОЙ ПОЛЕТНОЙ ИНФОРМАЦИИ | 2016 |
|
RU2628031C1 |
| СПОСОБ ФОРМИРОВАНИЯ СИГНАЛА ОПОВЕЩЕНИЯ ПИЛОТА О ДИСТАНЦИИ ТОРМОЖЕНИЯ ВОЗДУШНЫХ СУДОВ НА ЭТАПЕ ПОСАДКИ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2021 |
|
RU2781533C1 |
| Способ конфигурирования информационного поля кабины пилотов воздушного судна | 2019 |
|
RU2733178C1 |
| ИНТЕЛЛЕКТУАЛЬНАЯ СИСТЕМА ПОДДЕРЖКИ ЭКИПАЖА | 2013 |
|
RU2541902C2 |
| БОРТОВАЯ ИНТЕГРИРОВАННАЯ СИСТЕМА ИНФОРМАЦИОННОЙ ПОДДЕРЖКИ ЭКИПАЖА И КОГНИТИВНЫЙ ФОРМАТ ПРЕДСТАВЛЕНИЯ ПОЛЕТНОЙ ИНФОРМАЦИИ НА ЭТАПЕ "ВЗЛЕТ" МНОГОДВИГАТЕЛЬНОГО ВОЗДУШНОГО СУДНА | 2013 |
|
RU2550887C2 |
| ИНТЕЛЛЕКТУАЛЬНАЯ СИСТЕМА ПОДДЕРЖКИ ЭКИПАЖА | 2015 |
|
RU2598130C1 |
| СПОСОБ И СИСТЕМА ИНФОРМИРОВАНИЯ ЭКИПАЖА О БЕЗОПАСНОСТИ КАТАПУЛЬТИРОВАНИЯ | 2021 |
|
RU2774269C1 |
Изобретение относится к способу управления воздушным судном при боевом маневрировании. Для управления воздушным судном определяют параметры вектора собственного состояния воздушного судна, определяют параметры, характеризующие положение органов управления и анализируют их соответствие вектору собственного состояния и режиму полета, рассчитывают вероятность ошибочных действий экипажа и уточняют вероятность гибели экипажа и воздушного судна. При катастрофической ситуации выдают сигнал на спасение экипажа. В остальных случаях формируют управляющие воздействия на исполнительные системы, обеспечивающие устранение особых ситуаций. Обеспечивается повышение безопасности полета воздушного судна. 1 ил.
Способ управления воздушным судном при боевом маневрировании, основанный на определении параметров вектора собственного состояния воздушного судна и внешней среды, определении вероятности гибели системы «Экипаж - воздушное судно», отличающийся тем, что дополнительно определяют параметры, характеризующие положение органов управления воздушным судном, анализируют соответствие параметров органов управления вектору собственного состояния и режиму полета, рассчитывают вероятность ошибочных действий экипажа и на ее основании уточняют вероятность гибели системы «Экипаж - воздушное судно», рассчитывают вероятность выполнения боевой задачи и выбирают эффективную траекторию выполнения полетного задания, сравнивают текущую траекторию с эффективной траекторией, и если текущая траектория не соответствует эффективной, то сравнивают значение вероятности гибели Рг с вероятностями возникновения особых ситуаций в полете:
Ρг>Ρас - катастрофическая ситуация;
РАС≥Рг>Рсс - аварийная ситуация;
Рсс≥РГ>Рууп - сложная ситуация;
Рууп≥РГ>Рнуп - усложнение условий полета,
где РАС - вероятность возникновения аварийной ситуаций, Рсс - вероятность возникновения сложной ситуаций, Рууп - вероятность возникновения усложнения условий полета, Рнуп - вероятность возникновения нормальных условий полета, и если выполняется условие Рг>РАС, то выдают сигнал на выполнение действий по спасению экипажа, а в остальных случаях формируют управляющие воздействия на исполнительные системы, обеспечивающие устранение особых ситуаций.
| АВТОМАТИЗИРОВАННАЯ ВЫСОКОИНТЕЛЛЕКТУАЛЬНАЯ СИСТЕМА ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ ПОЛЕТОВ ЛЕТАТЕЛЬНОГО АППАРАТА | 2009 |
|
RU2388663C1 |
| Устройство для автоматического съема листа с форматного вала папп-машины | 1934 |
|
SU42024A1 |
| СИСТЕМА ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ ПОЛЕТА ПИЛОТИРУЕМОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 1999 |
|
RU2151714C1 |
| КОНУСОВИДНАЯ ПРОТИВОГАЗНАЯ МАСКА ИЗ ГИБКОГО МАТЕРИАЛА | 1926 |
|
SU6079A1 |
| CA 3059926 A1, 24.11.2020. | |||

