Предлагаемое изобретение относится к области измерения параметров объектов и может быть использовано в следующих приложениях: акушерство и гинекология; архитектурные и скульптурные работы; искусствоведение и реставрация; косметология; патологоанатомические исследования; проектирование и разработка образцов повседневной, рабочей, специальной и эксклюзивной одежды; реабилитационные мероприятия при наблюдаемых патологиях конечностей и опорно-мышечного аппарата; терапия и наблюдение пациентов с нарушениями обмена веществ, сопровождающихся выраженными изменениями осанки и вариациями массы тела; челюстно-лицевая хирургия и т.д. Сформированный в результате измерений и обработки измерительной информации 3D-образ объекта наблюдений может быть сохранен в подходящем цифровом формате и использоваться многократно при числовой оценке параметров формы объектов, а также в качестве дополнительной информации при периодических наблюдениях за динамикой формирования симптомов и внешних признаков естественных изменений и патологических вариаций состояния биологических объектов, а также в качестве дополнительной информации при формировании биометрических паспортов индивидуумов и т.п.
Наиболее близким по технической сущности к предлагаемому устройству является устройство для измерения параметров цилиндрических изделий (А. С. 242414, опубликовано 20.04.1967, Б. И. № 15).
Недостатками устройства являются: ограниченная номенклатура объектов измерений, являющихся изделиями цилиндрической формы; невозможность определения вспомогательных геометрических параметров формы и размеров объектов; невозможность хранения, обработки и представления измерительной информации в качестве 3D-образа обследуемого объекта.
Задачей, решаемой предлагаемым изобретением, является расширение функциональных возможностей ультразвуковых дальномеров в направлении измерений объемов и других параметров форм сложных протяженных звукоотражающих объектов и изделий.
Поставленная задача решается за счет того, что предлагаемое устройство, так же, как и известное, содержит эталонное кольцо, охватывающее контролируемое изделие или объект, измерительные органы в виде ультразвуковых приемо-передающих головок, расположенных на внутренней стороне поверхности эталонного кольца и отсчетную систему. Но, в отличие от известного, в предлагаемом устройстве эталонное кольцо выполнено подвижным в вертикальном направлении по направляющим, а приемо-передающие ультразвуковые головки (датчики) выполнены фокусирующими, с фокусным расстоянием, расположенным в области геометрического центра эталонного кольца, а отсчетная система, дополнительно реализует алгоритм управления, обеспечивающий формирование 3D-образа объекта, визуализируемого с помощью персонального компьютера.
Достигаемым техническим результатом является расширение номенклатуры измеряемых объектов и параметров их формы.
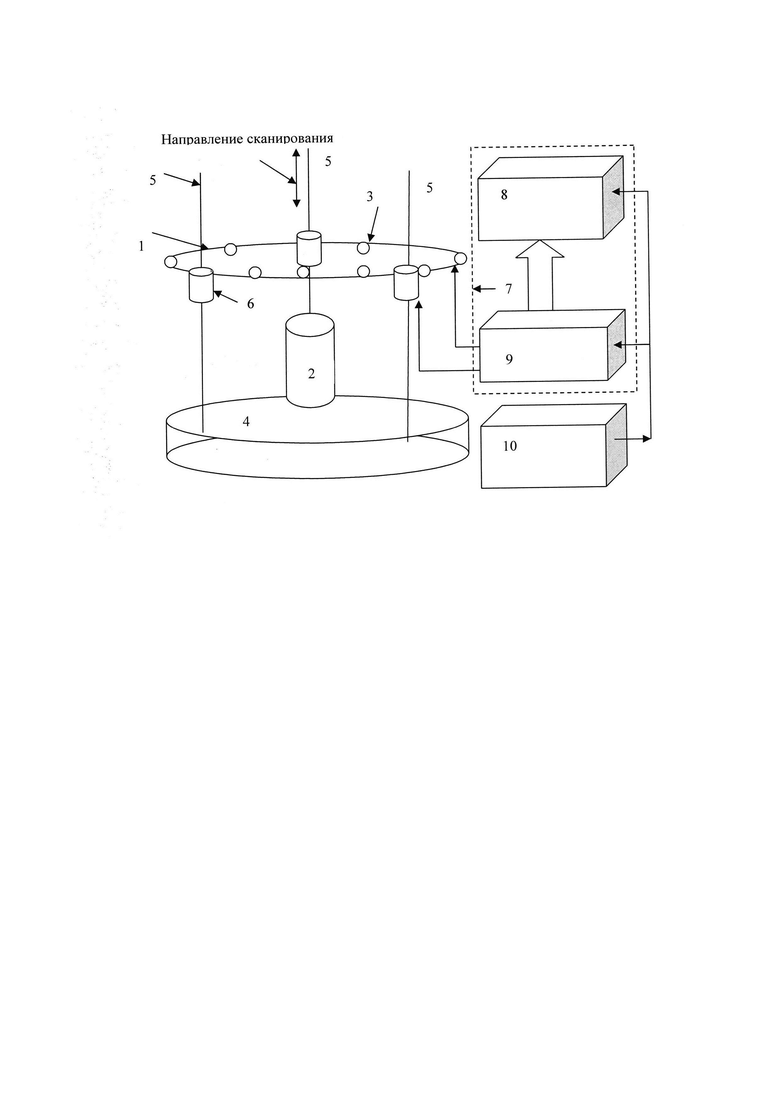
Изобретение поясняется чертежом, где показана схема организации предлагаемого устройства и обозначены: 1 - эталонное кольцо; 2 - обследуемое изделие; 3 - измерительные органы в виде ультразвуковых приемо-передающих фокусирующих головок (датчиков); 4 - основание; 5 - винтовые направляющие; 6 - электрические серводвигатели (3 шт.); 7 - отсчетно-управляющее устройство (ОУУ), состоящее из 8 - отсчетного устройства и 9 - ПЭВМ (компьютера); 10 - источник электропитания;
двунаправленная вертикальная стрелка показывает направление сканирования в вертикальном направлении (для создания объемного образа объекта) вдоль оси, проходящей через центр эталонной базы акустической системы.
Предлагаемое устройство имеет эталонное кольцо 1, являющееся основанием акустической системы, расположенной на круговой базе, и охватывающее контролируемое изделие 2, измерительные органы в виде ультразвуковых приемо-передающих фокусирующих головок 3, расположенных на внутренней поверхности эталонного кольца, а также основание 4, обеспечивающее устойчивость и механическую жесткость сканирующего устройства в функциональном состоянии, винтовые направляющие 5 (3 штуки), обеспечивающие прямолинейное возвратно-поступательное движение эталонного кольца в вертикальном направлении, электрические серводвигатели 6 (3 штуки), сообщающие вращательное движение винтовым направляющим при сканировании, отсчетно-управляющее устройство 7 (ОУУ), объединяющее отсчетное устройство - 8 и управляющий компьютер 9, и блок питания 10. Двунаправленная стрелка показывает направление сканирования эталонного кольца.
В исходном положении акустическая система 1 должна находиться внизу близко к основанию для обеспечения доступа объекта (пациента) 2 в измерительное пространство установки. Перед измерением объект 2 располагается приблизительно в средней части платформы-основания 4 в естественном (вертикальном) положении. Рабочим ходом устройства является движение акустической системы 1 вверх. После чего объект (пациент) 2 покидает установку, а акустическая система перемещается вниз в исходное положение автоматически или по выбору оператора. Контролируемое изделие устанавливают (с помощью подставок - на чертеже не показаны) внутрь пространства, образованного основанием, эталонным кольцом и винтовыми направляющими, и при движении эталонного кольца с датчиками «облучают» ультразвуковыми колебаниями от головок в режиме передачи по направлениям от внутренней поверхности эталонного кольца к его центру. Образующиеся сигналы, идущие обратно после отражения от поверхности изделия, принимаются датчиками в режиме приема. Расстояние от поверхности изделия до каждой головки (датчика) измеряют после измерения расстояния с помощью предыдущей головки (датчика). Таким образом, осуществляется последовательное скачкообразное сканирование ультразвукового луча на угол θ=360°/n, где n - количество ультразвуковых головок, определяемое соотношением n=(π⋅D)/d, где D - диаметр эталонной базы, a d - поперечный размер ультразвукового датчика. Искомый размер объекта в направлении «прозвучивания» определяется как разность между диаметром эталонного кольца и двумя расстояниями от поверхности изделия для произвольного датчика 3 и «зеркального» ему (3* - на чертеже не показан) на противоположной поверхности эталонного кольца 1). Совокупность значений размеров объекта вместе с данными угла сканирования образуют своеобразный срез («томограмму») изделия в плоскости эталонного кольца. При перемещении с помощью шаговых двигателей 6 эталонного кольца 1 в вертикальном направлении по винтовым стержням 5 на заданное расстояние можно сформировать новый «срез» и т.д. Если фиксировать, таким образом, координаты отражающих участков поверхности изделия в отсчетно-управляющем устройстве 7, то можно сформировать массив данных в отсчетном устройстве 8, как предпосылки для вычисления на компьютере 9, который входит в состав отсчетно-управляющего устройства, при последующей обработке характерных размеров, площади поверхности и объема контролируемого изделия, и построения «цифровой копии» пространственного изображения наблюдаемого объекта, реализуя необходимые операции анализа характеристик ультразвукового поля. Блок питания 10 обеспечивает рабочие напряжения всех электронных устройств системы, включая серводвигатели. Полное движение эталонного кольца в вертикальном направлении осуществляется на расстояние, несколько превышающее размер объекта в вертикальном направлении. Собранные рассмотренными способами данные дополнительно структурируются, и обрабатываются с целью вывода на экран монитора ПЭВМ 9 «зрительного образа» объекта (фигуры пациента). Целесообразно формировать такое изображение программным способом как масштабируемое и дополненное функцией «многоракурсного наблюдения» по выбору оператора. В практических условиях для измерения геометрических параметров материальных объектов используется ряд устройств, основанных на разнообразных физических принципах. Так, например, для измерения расстояний в воздушной среде используются ультразвуковые дальномеры, использующие в качестве информативного параметра время распространения ультразвукового сигнала до отражающей поверхности объекта и обратно. Для аналогичных целей используются лазерные, радиолокационные дальномеры и т.п. Все эти устройства позволяют с реализуемой ими на данный момент точностью обеспечивать оценку расстояния от измерительного устройства до ближайшей области или части объекта (его отражающей поверхности) с приемлемыми для практики временными и экономическими затратами. Принципиальная возможность получения с помощью ультразвукового дальномера в воздушной среде дополнительной информации о форме, размерах объекта и других параметрах существует, однако практическая реализация таких операций, как с точки зрения метрологических характеристик, так и в плане возрастания временных затрат на процессы измерений, делают такую постановку вопроса преобразования измерений нецелесообразной. В практических ситуациях области применения дальномерных устройств, использующих физические принципы, схожие и отличающиеся от ультразвуковых, обладают известным многообразием. Так, например, в клинической практике в настоящее время при осмотровых процедурах, лечащий врач обычно вынужден ограничиваться визуальным осмотром пациента, дополненным минимальным набором количественных показателей (масса тела, рост, объем грудной клетки, талии и т.п.), что в современных условиях является недостаточным для предоставления лечащему врачу дополнительных данных по клинически значимым признакам и симптомам заболеваний. Устранение указанных недостатков в данном и других характерных случаях предполагается возможным осуществить путем создания нового вида измерительных устройств - ультразвукового воздушного 3D-сканера. Схема, определяющая принцип действия указанного устройства, представлена на чертеже. Устройство должно обладать рядом конструктивных особенностей. На достаточно массивном для устойчивости основании 4 крепятся три вертикальные штанги 5 с винтовыми (или перфорированными) направляющими для перемещения шаговых двигателей 6, закрепленных на акустической системе 1. Схема подключения и управления работой шаговых двигателей должна обеспечивать их синхронную работу, исключающую перекос эталонного кольца в процессе сканирования по всей длине направляющих. На акустической системе в определенном порядке закрепляются ультразвуковые преобразователи 3 для работы в воздушной среде. Рабочая частота ультразвуковых ПЭП должна обеспечивать приемлемое разрешение по дальности при анализе отраженных от обследуемого объекта 2 (например, пациента) сигналов при рекомендуемой дальности. Для дальности, не превышающей 1 м, по предварительным оценкам рабочая частота ультразвука может лежать в пределах 40…300 кГц, а интенсивность возбуждаемых в воздушной среде ультразвуковых колебаний может составлять не более 0,01…0,02 Вт/см2, что не превышает допустимых значений, обеспечивающих безопасность пациента и обслуживающего персонала в процессе исследований. Вращение шаговых двигателей обеспечивает возвратно-поступательное движение акустической системы вместе с датчиками вдоль вертикальных направляющих вверх и вниз. Вдоль круговой образующей акустической системы эквидистантно располагаются ультразвуковые ПЭП. Акустические оси ПЭП ориентируются радиально по направлению к центру круга эталонной базы. При условном диаметре акустической системы ~1 м число датчиков по предварительным оценкам может составлять от 100 до 200. Геометрические размеры датчика в направлении ортогональном акустической оси датчика, должны обеспечивать требуемую «остроту» (ширину основного «лепестка» диаграммы направленности) акустического излучения (15…25 мм). Желательно, что бы число датчиков было четным и напротив датчика, работающего в режиме излучения, мог располагаться датчик - оппонент, работающий в режиме приема. Каждый из n датчиков акустической системы может работать в совмещенном режиме, являясь одновременно излучателем и приемником ультразвука. В процессе измерений излучающий преобразователь возбуждается электрическим сигналом, сформированным в генераторных устройствах счетного блока, создает импульсный ультразвуковой сигнал в воздушной среде, который распространяется до поверхности объекта обследований, отражается от нее из-за разности волновых сопротивлений воздуха и объекта (например, биологических тканей тела пациента), и принимается тем же датчиком, выполняющим функции приемника, затем усиливается усилителем и поступает на устройство регистрации счетного блока. При этом регистрируется время распространения первого отраженного импульса. При известной скорости распространения ультразвука в воздухе величина расстояния определяется дополнительным вычислением. После этого рабочий такт измерения осуществляет соседний по отношению к работавшему датчик. Величина времени задержки должна обеспечивать спадание величины ультразвукового поля от срабатывания предшествующего датчика. Направление обхода датчиков при измерениях значения не имеет. После опроса всех датчиков по периметру акустической системы формируется «томографический срез» для данного значения высоты смещения акустической системы, Поскольку во время опроса всех датчиков акустическая система находится в покое, а затем перемещается на некоторое расстояние Δh, зависящее от скорости движения каретки сканера, то формируется "контур" своеобразной динамической части отражающей поверхности объекта исследования, объединение которых при последующих тактах опросов датчиков по образующей, преобразуется в профиль отражающей поверхности объекта. Очевидно, что для получения более подробной информации об особенностях рельефа поверхности контролируемого объекта скорость перемещения акустической системы в вертикальном направлении должна быть как можно меньше. С другой стороны чрезмерное увеличение продолжительности процедуры измерения не должно вызывать состояния дискомфорта у пациентов. По предварительным оценкам продолжительность измерения может находиться в пределах 30-40 сек., что позволит пациенту сохранить неподвижность при сокращении дыхательных движений без существенного влияния на его состояние. Для дальнейшего снижения времени обследований можно применять другие алгоритмы объединения излучающих и приемных датчиков в группы. Величина максимального вертикального перемещения акустической системы Н может выбираться с помощью дополнительных телескопических устройств (на чертеже не показаны), регулирующих размеры вертикальных стоек.
Рассмотренный «дальномерный» алгоритм работы устройства предпочтителен при обследовании объектов простых форм (односвязных, "гладких" выпуклых поверхностей при отсутствии «областей затенения» и т.п.). При наличии участков со «сложным» рельефом (области плечевого пояса, нижних и верхних конечностей человека и т.п. на других объектах) предпочтителен другой алгоритм - «голографический»: один датчик излучает, а все остальные, одновременно, принимают. Такая схема работы устройства требует более развитого программного аппарата обработки сигнальной информации и, безусловно, является более сложной для схемотехнического исполнения, так как требует в предельном случае построения n независимых приемных каналов. При необходимости получения более детальной информации об особенностях строения конечностей их можно просканировать отдельно на полноразмерном устройстве или на дополнительных малогабаритных. Сформированные такими способами массивы информации можно «подшить» к уже имеющимся на программном уровне для построения полноразмерного «изображения» объекта. При этом происходит своеобразная оценка внешнего контура поверхностного рельефа фигуры пациента или другого объекта. Известными факторами, наиболее заметно влияющими на точность измерения расстояний в воздушной среде, являются турбулентность воздушных потоков в измерительном объеме и температурная зависимость скорости звука в воздушной среде. Для уменьшения степени влияния турбулентности целесообразно осуществлять измерения в помещениях (или в специально сформированных объемах-боксах) с отсутствием возможности образования направленных воздушных потоков. Погрешность измерений, связанную с температурной зависимостью фазовой скорости звука в воздухе, можно существенно уменьшить введением в состав системы дополнительных "эталонных" компенсирующих измерительных трактов.
Применение данного устройства в медицинской сфере в отличие от других устройств, используемых для оценивания антропометрических характеристик пациента, практически полностью устраняет субъективную составляющую формирования данных о статусе пациента со стороны медицинского персонала, и по известным данным не представляет опасности для здоровья человека (объекта) в отличие от устройств с лазерным, рентгеновским или радиационным излучением.
| название | год | авторы | номер документа |
|---|---|---|---|
| БЕСКОНТАКТНЫЙ СПОСОБ ОПРЕДЕЛЕНИЯ РАССТОЯНИЙ ДО ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2267743C1 |
| АКУСТИЧЕСКИЙ БЛОК УЛЬТРАЗВУКОВОГО ИЗМЕРИТЕЛЬНОГО УСТРОЙСТВА | 2002 |
|
RU2225082C1 |
| СПОСОБ БЕСКОНТАКТНОГО НЕРАЗРУШАЮЩЕГО КОНТРОЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2017 |
|
RU2661312C1 |
| УСТРОЙСТВО ИЗМЕРЕНИЯ РАЗМЕРОВ ГРУЗОВЫХ ОТСЕКОВ НЕФТЕНАЛИВНЫХ СУДОВ | 2002 |
|
RU2242711C2 |
| УСТРОЙСТВО ДЛЯ БЕСКОНТАКТНОГО ВЫСОКОТОЧНОГО ИЗМЕРЕНИЯ ФИЗИКО-ТЕХНИЧЕСКИХ ПАРАМЕТРОВ ОБЪЕКТА | 2007 |
|
RU2353925C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ПОЛУЧЕНИЯ УЛЬТРАЗВУКОВЫХ ИЗОБРАЖЕНИЙ СТРУКТУР И СОСУДОВ ГОЛОВНОГО МОЗГА | 2002 |
|
RU2232547C2 |
| Способ предотвращения повреждения акустического блока устройства для комплексной диагностики и терапии отраженным излучением HIFU | 2022 |
|
RU2806736C1 |
| СПОСОБ АВТОМАТИЗИРОВАННОЙ НАРУЖНОЙ ДИАГНОСТИКИ ТРУБОПРОВОДА И АВТОМАТИЗИРОВАННЫЙ ДИАГНОСТИЧЕСКИЙ КОМПЛЕКС ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2021 |
|
RU2757203C1 |
| Магнитная система сканера-дефектоскопа | 2016 |
|
RU2680103C2 |
| УСТРОЙСТВО ДЛЯ ОЦЕНКИ КАЧЕСТВА СВАРНОГО ШВА | 2013 |
|
RU2550673C2 |
Изобретение относится к метрологии, в частности к устройствам для измерения геометрических параметров трехмерного образа объектов из звукоотражающих материалов. Устройство для измерения геометрических параметров трехмерного образа изделий или объектов из звукоотражающих материалов, содержащее эталонное кольцо, охватывающее контролируемое изделие или объект, измерительные органы в виде ультразвуковых приемо-передающих датчиков, расположенных на внутренней поверхности кольца, и отсчетную систему. Эталонное кольцо выполнено подвижным в вертикальном направлении по всей высоте измеряемого объекта, а ультразвуковые приемо-передающие датчики выполнены фокусирующими с фокусным расстоянием, определяемым расположением геометрического центра эталонного кольца, а датчики соединены с отсчетно-управляющим устройством, реализующим рабочий алгоритм, обеспечивающий формирование трехмерного образа объекта, визуализируемого путем анализа характеристик ультразвукового поля с помощью компьютерного устройства. Технический результат - расширение номенклатуры измеряемых объектов и параметров их формы. 1 ил.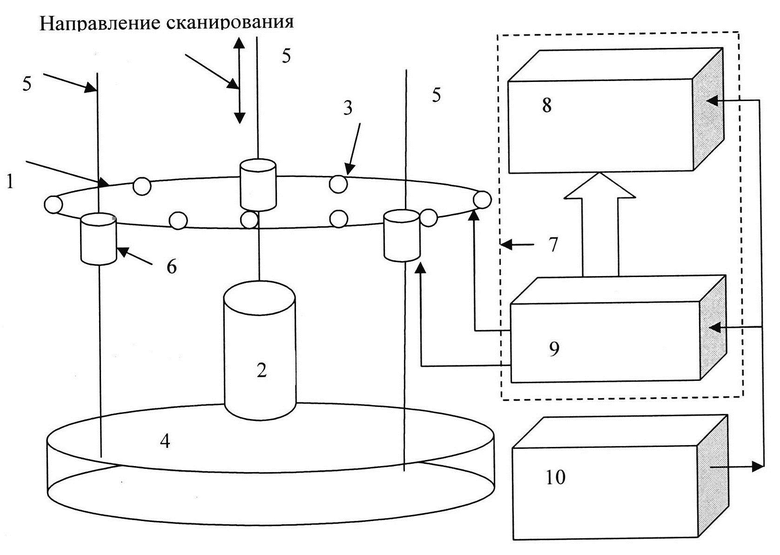
Устройство для измерения геометрических параметров трехмерного образа изделий или объектов из звукоотражающих материалов, содержащее эталонное кольцо, охватывающее контролируемое изделие или объект, измерительные органы в виде ультразвуковых приемо-передающих датчиков, расположенных на внутренней поверхности кольца, и отсчетную систему, отличающееся тем, что эталонное кольцо выполнено подвижным в вертикальном направлении по всей высоте измеряемого объекта, а ультразвуковые приемо-передающие датчики выполнены фокусирующими с фокусным расстоянием, определяемым расположением геометрического центра эталонного кольца, а датчики соединены с отсчетно-управляющим устройством, реализующим рабочий алгоритм, обеспечивающий формирование трехмерного образа объекта, визуализируемого путем анализа характеристик ультразвукового поля с помощью компьютерного устройства.
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПЕРИМЕТРОВ ЦИЛИНДРИЧЕСКИХ ИЗДЕЛИИ | 0 |
|
SU242414A1 |
| JP 60501874 A, 31.10.1985 | |||
| DE 202016000335 U1, 12.05.2016 | |||
| WO 1995028883 A1, 02.11.1995 | |||
| US 20190038259 A1, 07.02.2019 | |||
| US 10653321 B2, 19.05.2020 | |||
| US 20100113921 A1, 06.05.2010 | |||
| Спектральная щель | 1982 |
|
SU1213355A1 |
| AU 4813679 A, 03.01.1980 | |||
| WO 2020051112 A1, 12.03.2020 | |||
| US 4105018 A1, 08.08.1978 | |||
| AU 4169497 A, 14.04.1998 | |||
| US | |||

