Изобретение относится к радиолокации, а именно к способам радиолокационного обнаружения и распознавания радиолокационных объектов, и может быть использовано для идентификации группы однотипных малоразмерных беспилотных летательных аппаратов.
Известен способ определения количества одиночных целей, находящихся в одном неразрешаемом импульсном объеме РЛС при использовании узкополосных зондирующих сигналов [1]. Суть способа состав заключается, что в состав ранее известного устройства [2] дополнительно вводят усилитель мощности (УМ), гетеродин (Г), схему расширения (CP), счетчик импульсов (СИ), индикатор (И), последовательно соединенные усилитель промежуточной частоты (УПЧ), амплитудный детектор (АД), 1-ю дифференцирующую цепь (ДЦ), двухполупериодный выпрямитель (ДППВ), детектор огибающей (ДО), 2-ю ДЦ, диод, изменяя при этом межблочные связи схемы.
Работа радиолокационного устройства, реализующего данный способ, заключается в следующем. Сигнал с выхода амплитудного детектора проходит 1-ю ДЦ. Положение импульсов на выходе 1-й ДЦ также определяется положением рассеивающих центров целей вдоль линии визирования. Пройдя далее ДППВ, описанные импульсы становятся однополярными, после чего поступают на вход ДО, где производится выделение огибающей этих импульсов. С выхода ДО сигналы проходят 2-ю ДЦ. Положение импульсов на выходе 2-й ДЦ соответствует передним и задним фронтам видеоимпульсов целей на выходе ДО. Далее сигналы проходят диод, что обеспечивает отсечку импульсов отрицательной полярности, и подаются на 1-й вход ключа, который передает их на 2-й вход счетчика только при наличии на 2-м входе ключа строб-импульса. Стробимпульс формируется блоком расширения строб-импульсов из модулирующего импульса положительной полярности, поступающего с выхода импульсного модулятора. Расширенный строб-импульс, сформированный в блоке, задерживается в регулируемой линии задержки. Полученные на выходе диода положительные импульсы проходят во временном интервале строб-импульса через ключ на счетчик, сбрасываемый в нулевое состояние по первому входу в каждом периоде зондирования сигналом импульсного модулятора. Учитывая тот факт, что число N импульсов с выхода диода принимает значение N=2n или N=2n-1, где n число одиночных целей, попавших в неразрешаемый импульсный объем РЛС, счетчик должен реагировать на каждый нечетный входной импульс. Тогда подсчитанное им число импульсов будет соответствовать числу целей, входящих в состав распознаваемой групповой цели. Напряжение, пропорциональное числу одиночных целей в составе групповой, или цифровой код с аналогичной информацией, поступает с выхода счетчика на вход индикатора, где данная информация визуализируется на световом табло.
Данный способ эффективен при зондировании нескольких воздушных объектов имеющих большие геометрические размеры и расстояния, между которыми составляют несколько десятков-сотен метров. При этом его недостатком при распознавании группы однотипных малоразмерных БПЛА, имеющей большое число малых объектов с минимальными расстояниями [3], является то, что огибающая отраженного импульса от таких объектов на выходе амплитудного детектора будет иметь вид схожий с одиночным протяженным воздушным объектом и импульсы на выходе 1-й ДЦ примут неправильное положение, в связи, с чем произойдет формирование ошибочного решения о количественном составе воздушной цели (ВЦ).
Известен еще один способ идентификации групповой ВЦ [4], заключающийся в том, что в направлении обнаруженной воздушной цели излучают несколько пачек импульсов немодулированного зондирующего сигнала, принимают сигналы, отраженные от наблюдаемой воздушной цели, устанавливают в компараторе пороговое значение оцениваемого параметра принимаемого сигнала:

где h - пороговое значение оцениваемого параметра, MΔS - вычисленная оценка математического ожидания разности амплитуды принимаемого в i-ой пачке импульсов отраженного от наблюдаемой воздушной цели сигнала, при излучении немодулированного зондирующего сигнала, и среднего значения амплитуды отраженного от наблюдаемой воздушной цели сигнала за некоторое количество пачек импульсов ΔSi:


где Si - амплитуда принимаемого в i-ой пачке импульсов отраженного от наблюдаемой воздушной цели сигнала, при излучении немодулированного зондирующего сигнала, So - среднее значение амплитуды принимаемого сигнала, отраженного от наблюдаемой воздушной цели, при излучении немодулированного зондирующего сигнала, за N пачек импульсов.
При этом несмещенная оценка среднеквадратического отклонения а амплитуды принимаемого в i-ой пачке импульсов сигнала, отраженного от наблюдаемой воздушной цели, при излучении немодулированного зондирующего сигнала, относительно среднего значения амплитуды этого сигнала за N пачек импульсов определяется по формуле:
Производят перестройку фазовращателей на некоторый дискрет изменения фазы, вносимый в зондирующий сигнал, излучают в направлении наблюдаемой воздушной цели несколько пачек импульсов зондирующего сигнала с фазовой манипуляцией, принимают отраженные от наблюдаемой воздушной цели сигналы, вычисляют значение оцениваемого параметра принимаемого сигнала за N пачек импульсов, определяемого по формуле:

где q - оцениваемый параметр, S'i - амплитуда принимаемого в i-ой пачке импульсов отраженного от наблюдаемой воздушной цели сигнала, при излучении зондирующего сигнала с фазовой манипуляцией, S'o - среднее значение амплитуды принимаемого сигнала, отраженного от наблюдаемой воздушной цели, при излучении зондирующего сигнала с фазовой манипуляцией, за N пачек импульсов.
Сравнивают вычисленное значение оцениваемого параметра q принимаемого сигнала с ранее установленным пороговым значением оцениваемого параметра h, принимают решение о том, что воздушная цель является групповой при выполнении условия: оцениваемый параметр q больше порогового значения оцениваемого параметра h, одиночной - при выполнении условия: оцениваемый параметр q меньше или равен пороговому значению оцениваемого параметра h

Данный способ эффективно применять в том случае, когда групповой воздушный объект является парой летательных аппаратов. При этом возможна ситуация, когда он будет образован большим количеством малоразмерных БПЛА, что делает малоэффективным применение данного способа.
Целью предлагаемого изобретения является повышение качества распознавания группы однотипных малоразмерных летательных аппаратов, образованной большим количеством БПЛА, находящихся в одном элементе разрешения РЛС при ограниченном времени принятия классификационных решений.
Достижение поставленной цели обеспечивается за счет вычисления максимумов огибающих амплитуд отраженных от ВЦ сигналов для получения достаточной статистики.
Изобретение предполагает внедрение в радиолокационную систему средней дальности с узкополосным зондирующим сигналом и с фазированной антенной решеткой.
РЛС принимает отраженные от ВЦ сигналы в течение K периодов зондирования и производит их первичную согласованную обработку в окне сопровождения, детектирование и аналого-цифровое преобразование. В радиоприемном устройстве проводится процедура вычисления максимумов огибающих амплитуд отраженного сигнала Z(t) и формирование числового вектора R, в соответствии с выражением:

Полученный числовой вектор R является набором исходных данных для формирования статистики, позволяющей селектировать группу однотипных малоразмерных БПЛА и одну пространственно-сосредоточенную цель. Достаточной статистикой для принятия классификационного решения выбрано отношение математического ожидания MR к моде MoR последовательности из K максимумов огибающих отраженного сигнала:
где:
 - оценка математического ожидания, rk - максимум огибающей амплитуды отраженного сигнала (ОС) k-го периода зондирования, MoR - оценка моды, определяемая по формуле:
- оценка математического ожидания, rk - максимум огибающей амплитуды отраженного сигнала (ОС) k-го периода зондирования, MoR - оценка моды, определяемая по формуле:

где σR оценка среднеквадратического отклонения (СКО) последовательности максимумов огибающих амплитуд ОС, определяемая по формуле:

Полученное отношение  сравнивают с пороговым значением
сравнивают с пороговым значением  .
.
В случае превышения отношения  порогового значения
порогового значения  , принимают решение о том, что ВЦ является группой малоразмерных однотипных БПЛА, в противном случае - одна пространственно-сосредоточенная.
, принимают решение о том, что ВЦ является группой малоразмерных однотипных БПЛА, в противном случае - одна пространственно-сосредоточенная.
При выборе величины порогового значения  учитываются уровень собственных шумов и помех в приемных трактах РЛС. Согласно предварительным расчетам величину порогового значения
учитываются уровень собственных шумов и помех в приемных трактах РЛС. Согласно предварительным расчетам величину порогового значения  , следует выбирать в пределах от 1,596 до 1,645.
, следует выбирать в пределах от 1,596 до 1,645.
Возможность использования отношения  обусловлена тем, что плотность распределения вероятностей последовательности из K максимумов огибающих отраженного сигнала от группы малоразмерных однотипных БПЛА, как объекта без доминирующих блестящих точек, будет согласовываться с распределением Релея [5] и отношение
обусловлена тем, что плотность распределения вероятностей последовательности из K максимумов огибающих отраженного сигнала от группы малоразмерных однотипных БПЛА, как объекта без доминирующих блестящих точек, будет согласовываться с распределением Релея [5] и отношение  [6], при этом от пространственно-сосредоточенного воздушного объекта она не будет согласовываться с распределением Релея и отношение
[6], при этом от пространственно-сосредоточенного воздушного объекта она не будет согласовываться с распределением Релея и отношение 
Для проверки работоспособности способа радиолокационного распознавания группы малоразмерных однотипных БПЛА было проведено математическое моделирование в среде Matlab.
В качестве исходных данных принято:
1. ВЦ, в начальный момент времени, находится на дальности 27500 м, с курсовым углом 10°.
2. ВЦ движется равномерно и прямолинейно с постоянной скоростью полета 120 м/с, на высоте 500 м.
3. Величина порога 
4. Зондирующий сигнал: последовательность прямоугольных радиоимпульсов длительностью 2 мкс, периодом следования 100 мс, количеством импульсов равным 50 и несущей частотой 2 ГГц.
В процессе движения цели изменяется расстояние между объектами внутри группы, дальность до РЛС, курсовой угол, азимут и угол места. Высота остается постоянной. Математическое описание проводилось с помощью программы моделирования траекторий движения однотипных малоразмерных объектов в составе группы [7].
На фиг.1 представлена плотность распределения вероятностей максимумов огибающих амплитуд отраженного сигнала для варианта, когда ВЦ группа малоразмерных однотипных БПЛА.
Значения максимумов огибающих амплитуд отраженного сигнала от группы малоразмерных однотипных БПЛА были получены с помощью программы для моделирования отраженных сигналов от группы однотипных малоразмерных объектов [8].
На фиг.2 представлена плотность распределения вероятностей максимумов огибающих амплитуд отраженного сигнала для варианта, когда ВЦ - пространственнососредоточенная цель.
Максимумы огибающих амплитуд отраженного сигнала от пространственно сосредоточенной цели типа вертолет были получены с помощью программы моделирования радиолокационных сигналов, отраженных от объектов произвольной пространственной конфигурации, двигающихся равномерно и прямолинейно с атакующих ракурсов [9].
Статистические показатели максимумов огибающих амплитуд отраженного сигнала для группы малоразмерных БПЛА и пространственно сосредоточенной цели представлены в таблице 1.
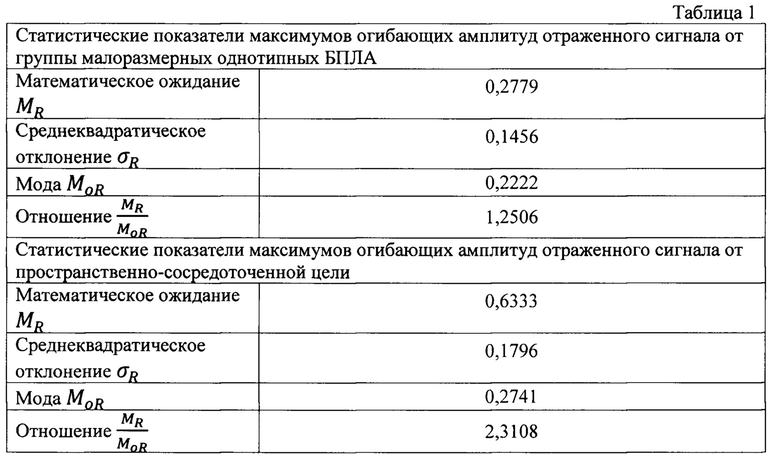
Анализ полученных значений отношения  для группы малоразмерных однотипных БПЛА (равной 1,2502) и пространственно-сосредоточенной цели (2,3108) при пороговом значении
для группы малоразмерных однотипных БПЛА (равной 1,2502) и пространственно-сосредоточенной цели (2,3108) при пороговом значении  подтверждает работоспособность способа.
подтверждает работоспособность способа.
Таким образом, предлагаемый способ распознавания группы малоразмерных однотипных БПЛА, имеет ряд преимуществ по сравнению с прототипом [1], что позволяет распознавать ВЦ, попадающие в один разрешаемый объем РЛС. Способ не требует сопровождения ВЦ в течение длительного промежутка времени и периодов записи сигналов Δt.
Способ легко реализуется с помощью стандартных математических операции в сигнальных процессорах, и может быть рекомендован для внедрения в существующие и перспективные РЛС сопровождения с узкополосным зондирующим сигналом, для повышения их информационных характеристик.
ИСТОЧНИКИ ИНФОРМАЦИИ
1. Патент Российская Федерация, МПК G01S 13/02 (2006.01). Радиолокационное устройство распознавания состава цели: №2095827: заявл. 03.04.1996. опубл. 10.11.1997 / Митрофанов Д.Г., Ермоленко В.П., заявитель ВА ПВО СВ РФ.
2. Небабин В.Г. Методы и техника радиолокационного распознавания // Радио и связь. 1984. С. 36-37.
3. Симонов, Д. Применение элементов искусственного интеллекта в беспилотных летательных аппаратах // Зарубежное военное обозрение. 2020. №2. С. 55-59.
4. Патент Российская Федерация, МПК G01S 13/52 (2006.01). Способ идентификации групповой воздушной цели: №2626459: заявл. 08.02.2016. опубл. 28.07.2017 / Кашин Я.М., Афонин И.Е. и др., заявитель Кашин Я.М.
5. Теоретические основы радиолокации / Под ред. Я.Д. Ширмана. М.: Сов. радио, 1970. 560 с.
6. Королюк, В.С. Справочник по теории вероятностей и математической статистике / В.С. Королюк, Н.И. Портенко, Наумова думка. Киев, 1977. 580 с.
7. Свидетельство о государственной регистрации программы для ЭВМ №2021617760 Российская Федерация. Программа для моделирования траекторий движения однотипных малоразмерных объектов в составе группы: №2021617760 заявл. 14.05.2021 / Мамедов В.А., Комонов B.C., Сисигин И.В. и др.
8. Свидетельство о государственной регистрации программы для ЭВМ №2021619142 Российская Федерация. Программа для моделирования отраженных сигналов от группы однотипных малоразмерных объектов: №2021618290 заявл. 29.05.2021 / Мамедов В.А., Комонов B.C., Сисигин И.В. и др.
9. Свидетельство о государственной регистрации программы для ЭВМ №2020610183 Российская Федерация. Программа для моделирования радиолокационных сигналов, отраженных от объектов произвольной пространственной конфигурации, двигающихся равномерно и прямолинейно с атакующих ракурсов: №2019667368 заявл. 23.12.2019 / Мамедов В.А., Комонов B.C., Сисигин И.В. и др.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ СЕЛЕКЦИИ ЛОЖНЫХ ВОЗДУШНЫХ ЦЕЛЕЙ | 2005 |
|
RU2280263C1 |
| СПОСОБ ИДЕНТИФИКАЦИИ ГРУППОВОЙ ВОЗДУШНОЙ ЦЕЛИ | 2016 |
|
RU2626459C1 |
| Способ оценки пространственного размера воздушной цели по частотной протяженности доплеровского портрета | 2018 |
|
RU2679396C2 |
| Способ защиты радиолокационной станции с фазоманипулированными зондирующими сигналами от упреждающих сигналоподобных помех | 2024 |
|
RU2840720C1 |
| Способ однозначной первичной дальнометрии группы целей на фоне узкополосных пассивных помех в режиме высокой частоты повторения импульсов зондирующего сигнала | 2020 |
|
RU2756034C1 |
| Способ распознавания ложных (имитирующих) целей в многопозиционной радиолокационной станции с широкополосным зондирующим сигналом | 2020 |
|
RU2755993C1 |
| Способ селекции имитаторов вторичного излучения воздушных объектов | 2020 |
|
RU2735289C1 |
| СПОСОБ ИЗВЛЕЧЕНИЯ ИЗ ДОПЛЕРОВСКИХ ПОРТРЕТОВ ВОЗДУШНЫХ ОБЪЕКТОВ ПРИЗНАКОВ ИДЕНТИФИКАЦИИ С ИСПОЛЬЗОВАНИЕМ МЕТОДА СВЕРХРАЗРЕШЕНИЯ | 2015 |
|
RU2589737C1 |
| СПОСОБ ВНЕШНЕГО РАДИОЛОКАЦИОННОГО ВЫЯВЛЕНИЯ ФАКТА НАЛИЧИЯ ТРАЕКТОРНЫХ НЕСТАБИЛЬНОСТЕЙ ПОЛЕТА У ВОЗДУШНОГО ОБЪЕКТА ПО СТРУКТУРЕ ЕГО ИМПУЛЬСНОЙ ХАРАКТЕРИСТИКИ | 2014 |
|
RU2562060C1 |
| Способ селекции реальных воздушных объектов на фоне помех, формируемых имитаторами вторичного излучения, за счет использования мобильного радиолокатора | 2021 |
|
RU2787471C1 |


Изобретение относится к радиолокации, а именно к способам радиолокационного обнаружения и распознавания радиолокационных объектов, и может быть использовано для идентификации группы однотипных малоразмерных беспилотных летательных аппаратов. Техническим результатом является повышение качества распознавания группы однотипных малоразмерных летательных аппаратов, образованной большим количеством БПЛА, находящихся в одном элементе разрешения РЛС при ограниченном времени принятия классификационных решений. В заявленном способе радиолокационная станция принимает отраженные от воздушной цели сигналы в течение K периодов зондирования и производит их первичную согласованную обработку в окне сопровождения, детектирование и аналого-цифровое преобразование. Далее проводится процедура выделения максимумов огибающих амплитуд отраженного сигнала, вычисляется отношение оценки математического ожидания максимумов огибающих отраженного сигнала к их моде, принятие классификационного решения о принадлежности воздушной цели к классу группа малоразмерных однотипных БПЛА/пространственно сосредоточенная производят путем сравнения отношения оценки математического ожидания максимумов огибающих отраженного сигнала к их моде, вычисленного от K огибающих амплитуд отраженного сигнала, с заранее установленным пороговым значением. 2 ил., 1 табл.
Способ радиолокационного распознавания группы однотипных малоразмерных беспилотных летательных аппаратов, заключающийся в том, что радиоприемное устройство радиолокационной станции принимает отраженные от воздушной цели сигналы в течение K периодов зондирования, производит их первичную согласованную обработку в окне сопровождения, детектирование и аналого-цифровое преобразование, затем выполняется процедура выделения максимумов огибающих амплитуд отраженного сигнала и вычисляется отношение оценки математического ожидания максимумов огибающих отраженного сигнала к моде максимумов огибающих отраженного сигнала, принятие классификационного решения о принадлежности воздушной цели к классу группа малоразмерных однотипных БПЛА/пространственно сосредоточенная путем сравнения отношения оценки математического ожидания максимумов огибающих отраженного сигнала к моде максимумов огибающих отраженного сигнала, вычисленного от K огибающих амплитуд отраженного сигнала, с заранее установленным пороговым значением.
| СПОСОБ ИДЕНТИФИКАЦИИ ГРУППОВОЙ ВОЗДУШНОЙ ЦЕЛИ | 2016 |
|
RU2626459C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ГРУППОВОЙ ЦЕЛИ ИМПУЛЬСНО-ДОПЛЕРОВСКОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИЕЙ | 2006 |
|
RU2316788C9 |
| Способ распознавания радиолокационных объектов | 2017 |
|
RU2667516C1 |
| СПОСОБ РАСПОЗНАВАНИЯ РАДИОЛОКАЦИОННЫХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2006 |
|
RU2317568C1 |
| СПОСОБ РАСПОЗНАВАНИЯ РАДИОЛОКАЦИОННЫХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2005 |
|
RU2312370C2 |
| АНАНЕНКОВ А.Е., МАРИН Д.В., НУЖДИН В.М., РАСТОРГУЕВ В.В., СОКОЛОВ П.В | |||
| К вопросу о наблюдении малоразмерных беспилотных летательных аппаратов // Труды МАИ | |||
| Токарный резец | 1924 |
|
SU2016A1 |
| CN 109061632 A, 21.12.2018 | |||
| CN | |||

