Область техники
Изобретение относится к технической области промышленных роботов, в частности к устройству вторичного позиционирования высокоточного мобильного робота.
Уровень техники
Промышленные роботы являются типом роботов, которые требуют очень высокой точности, особенно производственные промышленные роботы для обработки, сборки, сварки и т.д. Известные промышленные роботы обычно оснащены и закрепленными механическими руками. В известном уровне техники точность позиционирования и точность положения закрепленных механических рук достигли, соответственно, уровня точности 0,01 мм и 0,01°, и такие механические руки широко используются в разных отраслях, где требуется исключительно высокая точность, включая аэрокосмическую промышленность.
Мобильные роботы расширяют сферу применения и значительно увеличивают гибкость промышленных роботов. Существует много путей для перемещения промышленных роботов, например, перемещение по фиксированным рельсам, перемещение по направляющей, перемещение на колесах, и т.д., причем способ перемещения автоматически управляемых тележек (далее "АУТ") является наиболее гибким и быстрым. Однако, из-за добавления ходовой части система мобильного робота становится более сложной, точность мобильного позиционирования снижена, жесткость подшипника невысокая и т.д., в результате чего рабочая точность робота снижается. Существует много проблем, которые необходимо решить, чтобы АУТ и промышленные роботы работали в координации, но в настоящее время исследований по точности мобильных роботов мало. Луо Цзяньмин (Luo Jianming) и др. использовали систему визуального позиционирования на мобильной роботизированной руке, чтобы калибровать зрительную координацию способом оптимизации Левенберга-Марквардта, и затем использовали фиксированные характерные точки для определения положения и направления камеры, чтобы компенсировать ошибку позиционирования мобильной тележки, и это исследование дало определенные результаты, но полученная точность не является идеальной для многих условий обработки; в исследовании точности позиционирования ряда просверливаемых отверстий при сборке летательного аппарата Чен Донгдон (Chen Dongdong) использовал промышленную камеру для калибровки системы координат рабочих деталей роботов по примененной модели ошибки вычисляется ошибка базовой координаты промышленного робота, вызванная вторичной ошибкой тележки АУТ, и такая ошибка корректируется по модели обратных взвешенных расстояний, в результате чего отклонение апертуры составляет ±0,01 мм, и достигается хороший эффект. Однако, поскольку корректируемая ошибка не является ошибкой в реальном времени, эффект коррекции ошибки будет в некоторой степени колебаться, помимо этого, когда робот движется больше установленного срока, механический износ и ухудшившаяся координация будут увеличивать эту ошибку и отрицательно влиять на результат коррекции ошибки, вследствие чего существует насущная необходимость в разработке устройства вторичного позиционирования для высокоточного мобильного робота.
Раскрытие изобретения
Изобретение предлагает устройство вторичного позиционирования для высокоточного мобильного робота, чтобы решить технические проблемы, существующие в известном уровне техники.
Изобретение предлагает устройство вторичного позиционирования для высокоточного мобильного робота, включающее устройство вторичного позиционирования, расположенное на рабочей станции, промышленный робот транспортируется тележкой АУТ к устройству вторичного позиционирования, и шасси промышленного робота блокируется устройством вторичного позиционирования, при этом устройство вторичного позиционирования включает несколько зажимных механизмов и несколько устройств позиционирования, причем эти несколько зажимных механизмов расположены на левой и правой сторонах рабочей станции, упомянутые несколько устройств позиционирования расположены в разных местах рабочей станции; зажимное устройство включает установочный блок и рычажный механизм, причем установочный блок зафиксирован на рабочей станции, рычажный механизм расположен на установочном блоке, при этом рычажный механизм включает зажимный блок, нижняя поверхность шасси промышленного робота снабжена приводным устройством и коленчатым валом, соединенным с приводным устройством, коленчатый вал имеет две шейки вала, и эти две шейки вала взаимодействуют с рычажным механизмом, и когда приводное устройство приводит коленчатый вал во вращение, две шейки вала приводят рычажный механизм в работу, и зажимный блок рычажного механизма опускается или поднимается, и шасси промышленного робота блокируется или разблокируется.
Высокоточный мобильный робот изобретения включает устройство вторичного позиционирования, которое может взаимодействовать с усовершенствованным шасси промышленного робота, чтобы выполнять быстрое зажимание и отпускание шасси промышленного робота, причем устройство включает: усовершенствованное шасси промышленного робота, устройство позиционирования, зажимный механизм. Устройство позиционирования выполняет полное позиционирование промышленного робота по принципу шеститочечного позиционирования, и зажимный механизм прижимает шасси к позиционирующей поверхности устройства позиционирования. Усовершенствованное шасси промышленного робота снабжено коленчатым валом, соответствующим каждому зажимному механизму, приводное устройство на шасси приводит коленчатый вал во вращение, что заставляет зажимный механизм зажимать, блокировать или быстро отпускать шасси. Путем взаимодействия с промышленным роботом, оснащенным усовершенствованным шасси, изобретение обеспечивает позиционирование, зажимание и блокировку робота при работе и улучшает жесткость и точность промышленного робота, когда робот простаивает и не задействован, при этом робот может быть оснащен тележкой АУТ, чтобы перемещаться к следующей рабочей станции для расширения рабочего диапазона робота.
Краткое описание прилагаемых чертежей
Для того чтобы более четко объяснить варианты осуществления изобретения или технические схемы известного уровня техники, ниже будут кратко представлены требуемые чертежи вариантов осуществления или описания известного уровня техники, при этом очевидно, что чертежи в последующем описании относятся только к некоторым вариантам осуществления изобретения, и специалисты в данной области техники могут выполнить другие чертежи на основе этих чертежей, не прилагая какие-либо творческие усилия.
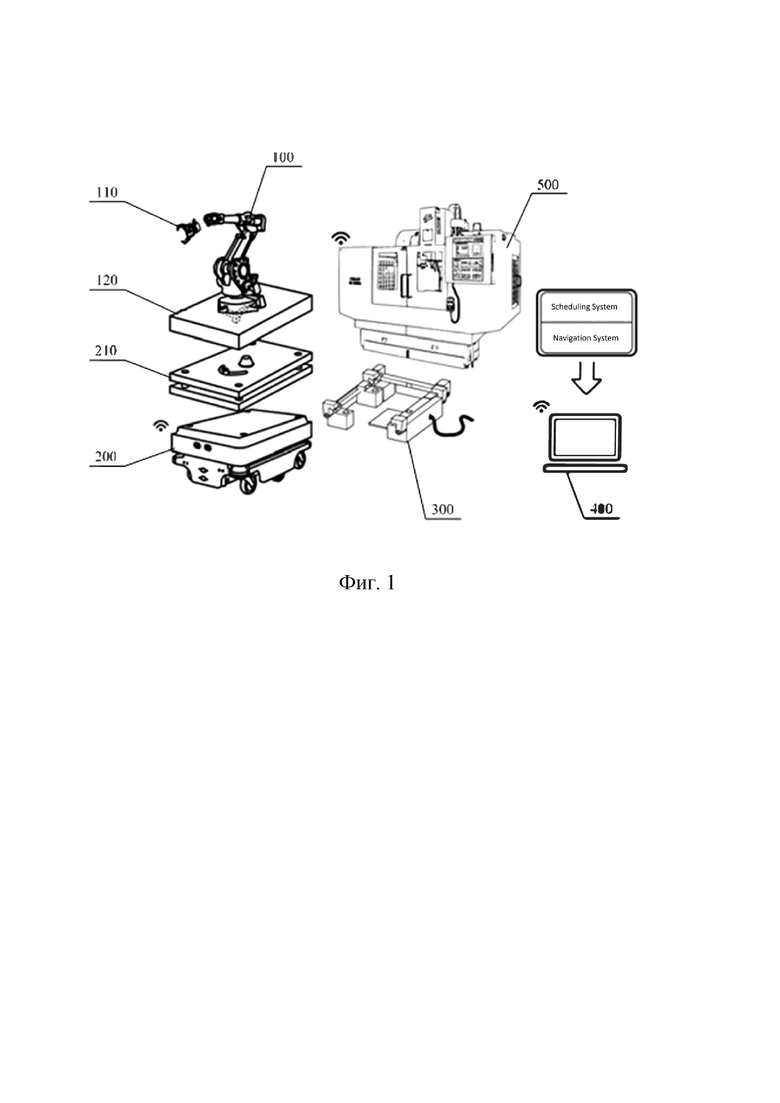
На Фиг. 1 показан состав устройства вторичного позиционирования для высокоточного мобильного робота согласно изобретению.
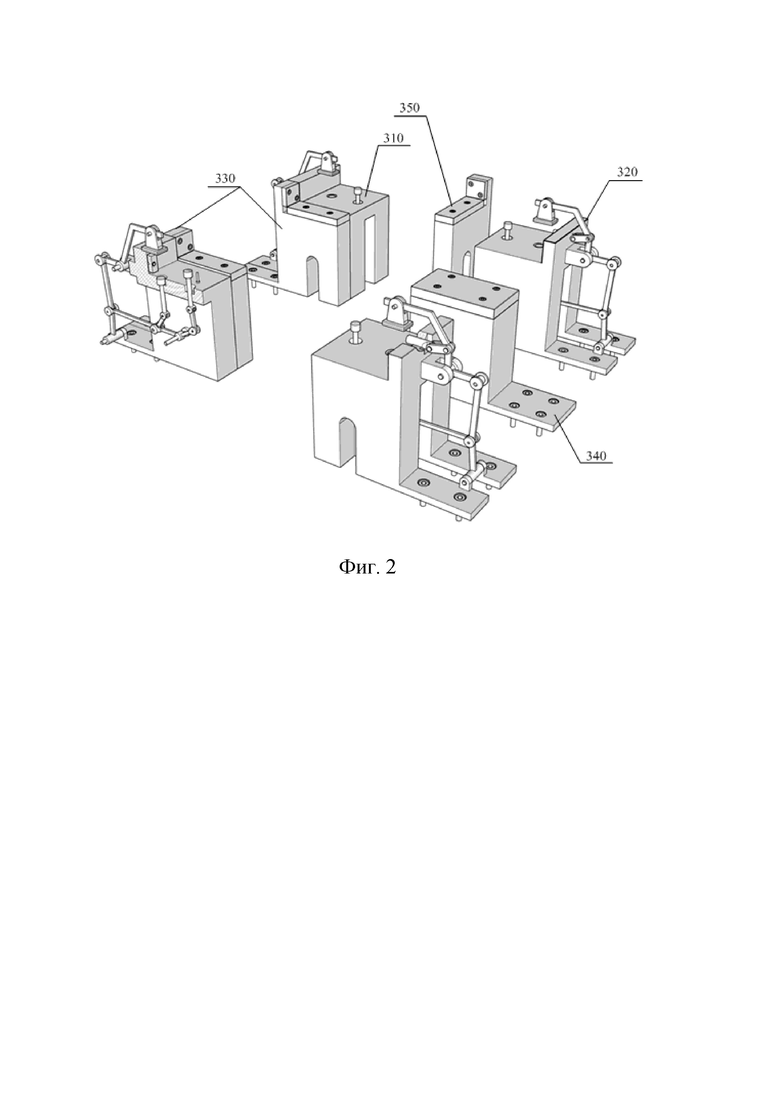
На Фиг. 2 показана конструкция устройства вторичного позиционирования согласно изобретению.
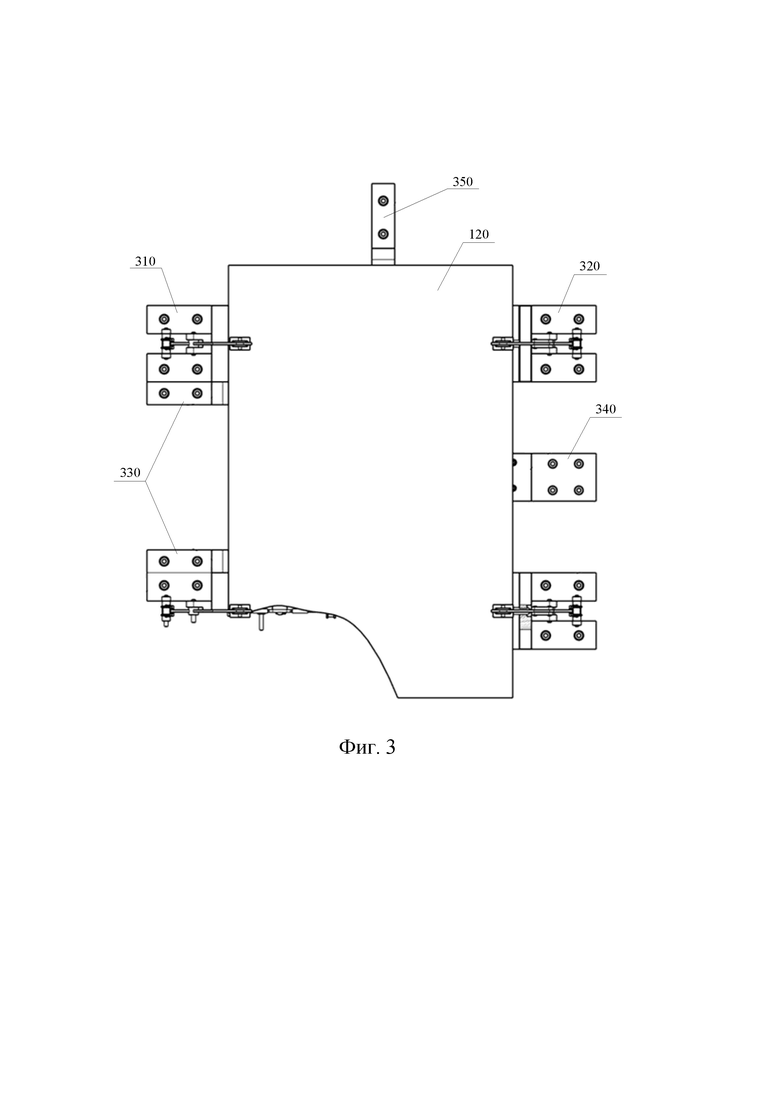
На Фиг. 3 показан вид сверху шасси промышленного робота, зажатого на устройстве вторичного позиционирования.
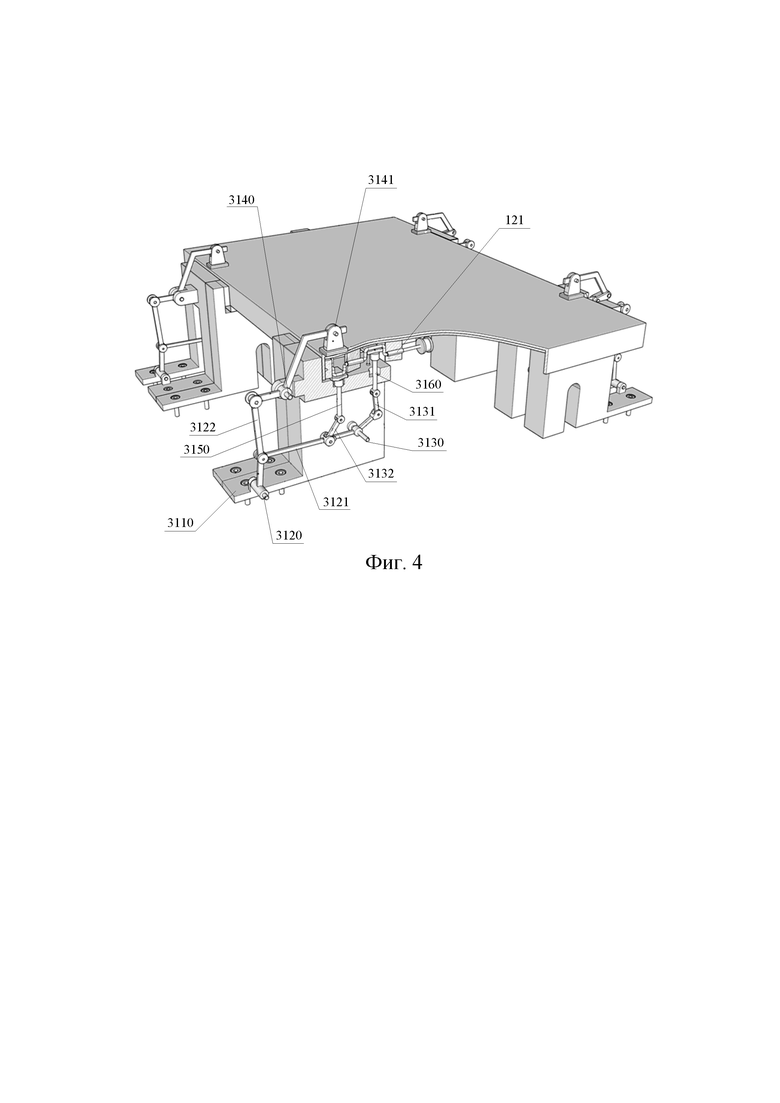
На Фиг. 4 показан вид в частичном разрезе одной стороны шасси и устройства вторичного позиционирования с Фиг. 3.
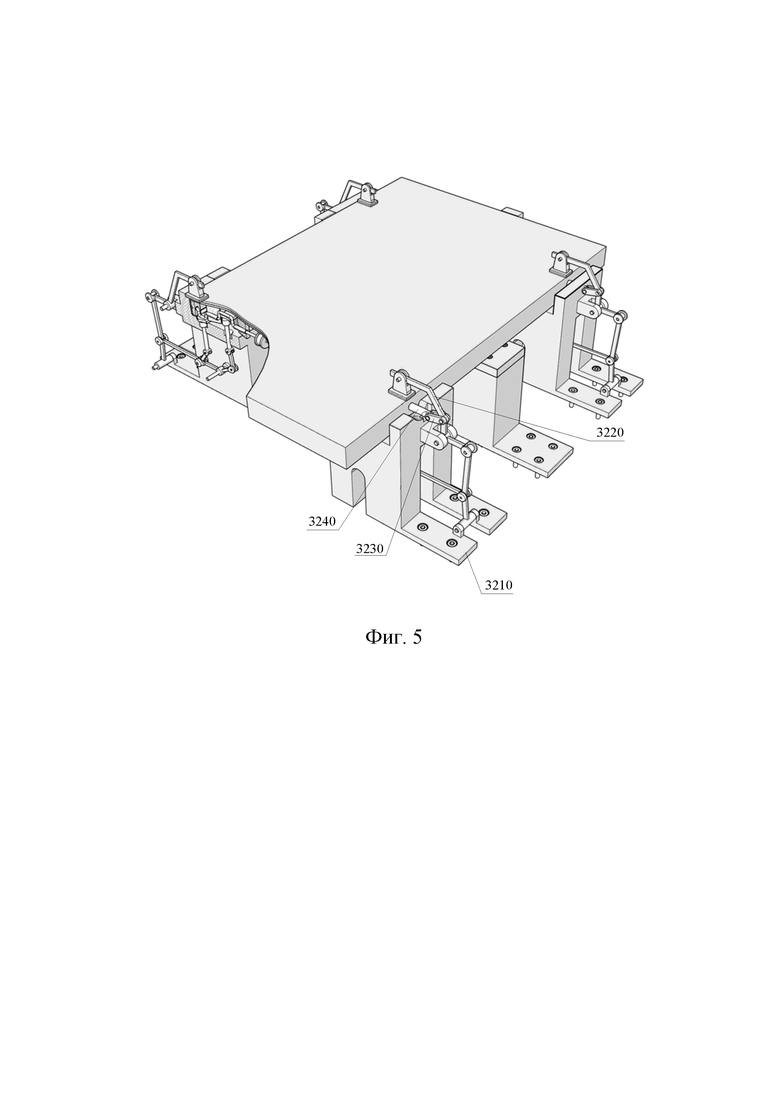
На Фиг. 5 показан вид в частичном разрезе другой стороны шасси и устройства вторичного позиционирования с Фиг. 3.
Вариант осуществления изобретения
Технические схемы вариантов осуществления изобретения будут описаны четко и в полном объеме со ссылками на прилагаемые чертежи вариантов осуществления изобретения, при этом очевидно, что описанные варианты осуществления являются лишь частью вариантов осуществления изобретения, но не всеми вариантами осуществления. На основе этих вариантов осуществления изобретения все другие варианты осуществления, полученные специалистом в данной области техники без приложения творческих усилий, должны быть включены в объем охраны изобретения.
Как показано на Фиг. 1, устройство вторичного позиционирования согласно изобретению применено в системе управления и планирования высокоточного мобильного робота, при этом система включает промышленный робот 100, тележку АУТ 200, устройство вторичного позиционирования 300 и верхний компьютер 400; промышленный робот 100 включает механическую руку и шасси 120, закрепленное на нижней части механической руки, механическая рука снабжена сменными концевыми инструментами 110. АУТ 200 включает корпус тележки и кронштейн 210, расположенный на верхней части корпуса тележки, корпус тележки снабжен ходовой частью, и корпус тележки соединен с возможностью сообщения с верхним компьютером 400 по беспроводной связи, и кронштейн 210 соединен с возможностью отсоединения с шасси 120 промышленного робота 100.
Устройства вторичного позиционирования 300 расположены группами, каждое устройство вторичного позиционирования 300 жестко закреплено на рабочей станции, расположенной в области обработки, и каждая рабочая станция соответствует обрабатывающему станку 500, обрабатывающий станок 500 также соединен с возможностью сообщения с верхним компьютером 400 по беспроводной связи.
Верхний компьютер 400 снабжен программным обеспечением системы планирования и программным обеспечением системы навигации, когда обрабатывающий станок 500 должен обрабатывать детали, информация запроса направляется в верхний компьютер 400; в ответ на информацию запроса верхний компьютер 400 произвольно выбирает АУТ 200, находящуюся в режиме ожидания, посредством программное обеспечение системы планирования, АУТ в режиме ожидания – это АУТ, снабженная промышленным роботом 100, и промышленный робот 100 находится в состоянии простоя; после выбора АУТ 200 в режиме ожидания, верхний компьютер 400 направляет команду управления движением тележке АУТ 200, и программное обеспечение системы навигации перемещает АУТ 200 согласно положению обрабатывающего станка 500, который отправил информацию запроса; АУТ 200 перемещается к устройству вторичного позиционирования 300, соответствующему обрабатывающему станку 500 согласно навигации верхнего компьютера 400. После того, как АУТ 200 переместится в требуемое место, кронштейн 210 выходит из связи с шасси промышленного робота 100, и АУТ 200 автоматически перемещается в заданную зону.
После помещения шасси промышленного робота 100 на устройство вторичного позиционирования 300, то есть после блокировки с устройством вторичного позиционирования 300, причем устройство вторичного позиционирования 300 снабжено розеткой для подачи электропитания на промышленный робот 100; после того как шасси промышленного робота 100 будет заблокировано на устройстве вторичного позиционирования 300, вилку промышленного робота 100 вставляют в розетку; после этого промышленный робот 100 начинает работать и взаимодействует с обрабатывающим станком 500, чтобы выполнять обработку узлов и деталей.
Когда задание по обработке для обрабатывающего станка 500 будет выполнено, информация запроса направляется обрабатывающим станком 500 в верхний компьютер 400; в ответ на информацию запроса верхний компьютер 400 произвольно выбирает АУТ 200 в режиме простоя посредством программного обеспечения системы планирования; АУТ в состоянии простоя - это АУТ без промышленного робота 100; после выбора простаивающей АУТ 200 верхний компьютер 400 направляет команду управления движением тележке АУТ 200, и программное обеспечение системы навигации перемещает АУТ 200 согласно положению обрабатывающего станка 500, который направил информацию запроса; АУТ 200 перемещается к устройству вторичного позиционирования 300, соответствующему обрабатывающему станку 500 согласно навигации верхнего компьютера 400. После перемещения АУТ 200 в требуемое место промышленный робот 100 разблокируется на устройстве вторичного позиционирования 300, и кронштейн 210 АУТ 200 соединяется с шасси промышленного робота 100, и АУТ 200 вместе с промышленным роботом 100 автоматически перемещаются в заданную зону.
По сравнению с традиционными мобильными промышленными роботами, система управления и планирования высокоточного мобильного робота согласно изобретению имеет следующие преимущества: (1) промышленный робот зафиксирован при работе, например зафиксированные механические руки при хорошей жесткости и высокой точности могут использоваться для повышения рабочей точности за счет их технологии; (2) промышленные роботы и тележки АУТ имеют отношение "многие с многими" и отношение "водитель-пассажир" с гибкими методами работы. Поломка АУТ не влияет на перемещение и работу промышленных роботов, и наоборот; (3) по сравнению с мобильными промышленными роботами на фиксированных направляющих, роботы с АУТ более гибкие в перемещении, лучше адаптируемы к месту работы и ниже по стоимости; (4) рабочая точность промышленного робота не зависит от точности позиционирования АУТ, поэтому к АУТ предъявляются низкие требования по точности позиционирования, и необходимо только направить промышленный робот на рабочую станцию.
Показанная на Фиг. 2 – 5 конструкция устройства вторичного позиционирования 300 будет подробно описана согласно изобретению.
Устройство вторичного позиционирования 300 включает левый зажимный механизм 310, правый зажимный механизм 320, левое устройство позиционирования 330, правое устройство позиционирования 340, и заднее устройство позиционирования 350, в данном варианте осуществления число левых зажимных механизмов 310, правых зажимных механизмов 320, и левых устройств позиционирования 330 равно двум, два левых зажимных механизма 310 расположены на двух соответственных концах левой стороны рабочей станции, два правых зажимных механизма 320 расположены на двух соответственных концах правой стороны рабочей станции, два левых устройства позиционирования 330 расположены соответственно и прикреплены к двум левым зажимным механизмам 310. Правое устройство позиционирования 340 расположено между двумя правыми зажимными механизмами 320, заднее устройство позиционирования 350 расположено на задней стороне рабочей станции между левым зажимным механизмом 310 и правым зажимным механизмом 320.
Левый зажимный механизм 310 включает левый установочный блок 3110 и левый рычажный механизм, левый установочный блок 3110 прикреплен к рабочей станции винтами, левый рычажный механизм включает нижний установочный вал 3120, средний установочный вал 3130 и верхний установочный вал 3140, эти три установочных вала расположены с возможностью вращения соответственно на левом установочном блоке 3110, оси нижнего установочного вала 3120, среднего установочного вала 3130 и верхнего установочного вала 3140 параллельны и горизонтальны. Нижний установочный вал 3120 зафиксирован и соединен с нижним соединительным стержнем, средний установочный вал 3130 зафиксирован и соединен с двумя средними соединительными стержнями, верхний установочный вал 3140 зафиксирован и соединен с двумя верхними соединительными стержнями, один конец нижнего соединительного стержня соединен с возможностью вращения со средним соединительным стержнем посредством первого соединительного стержня 3121, два конца первого соединительного стержня соединены, оба с возможностью вращения, с нижним соединительным стержнем и средним соединительным стержнем. Нижний соединительный стержень также соединен с возможностью вращения с верхним соединительным стержнем посредством второго соединительного стержня 3122, два конца второго соединительного стержня 3122 соединены, оба с возможностью вращения, с нижним соединительным стержнем и верхним соединительным стержнем, точка соединения между нижним соединительным стержнем и первым соединительным стержнем 3121 и точка соединения между ними и вторым соединительным стержнем 3122 совпадают.
На верхней поверхности левого установочного блока 3110 выполнены два сквозных отверстия, первый выталкиватель 3150 и второй выталкиватель 3160 соответственно входят в два сквозных отверстия, и первый выталкиватель 3150 соединен с возможностью вращения с точкой соединения первого соединительного стержня 3121 и среднего соединительного стержня посредством третьего соединительного стержня 3132, два конца третьего соединительного стержня 3132 соединены с возможностью вращения соответственно с первым выталкивателем 3150 и первым соединительным стержнем 3121. Второй выталкиватель 3160 соединен с возможностью вращения с другим средним соединительным стержнем посредством четвертого соединительного стержня 3131, два конца четвертого соединительного стержня 3131 соединены с возможностью вращения соответственно с вторым выталкивателем 3160 и средним соединительным стержнем. Один конец другого верхнего соединительного стержня расположен над левым установочным блоком 3110, и зажимный блок 3141 расположен с возможностью вращения на одном конце верхнего соединительного стержня.
Шасси 120 промышленного робота 100 снабжено двумя желобами на левой и правой сторонах нижней поверхности, и положения двух желобов на левой стороне соответствуют положениям первого выталкивателя 3150 и второго выталкивателя 3160, коленчатый вал 121 расположен с возможностью вращения в этих двух желобах, коленчатый вал 121 имеет две шейки вала на противоположных направлениях, эти две шейки вала расположены в соответственных двух желобах, один конец коленчатого вала 121 соединен с приводным устройством, проходя через боковую стенку желоба, приводным устройством является двигатель или другое оборудование, расположенное на нижней поверхности шасси 120, приводное устройство приводит в движение шейки вала в противоположных направлениях в двух желобах, чтобы вращаться при работе, этим заставляя первый выталкиватель 3150 и второй выталкиватель 3160 ходить вверх и вниз.
В данном варианте осуществления детали левого зажимного механизма 310, которые находятся в контакте с шасси 120, имеют прокладки, например верхний конец первого выталкивателя 3150, верхний конец второго выталкивателя 3160 и нижняя поверхность зажимного блока 3141, силу прижатия можно регулировать путем установки прокладок разной толщины.
Когда АУТ 200 транспортирует промышленный робот 100 в устройство вторичного позиционирования 300, шасси 120 входит с передней стороны устройства вторичного позиционирования 300, то есть стороны, противоположной заднему устройству позиционирования 350, одновременно с этим верхние концы первого выталкивателя 3150 и второго выталкивателя 3160 выступают из сквозных отверстий, и два желоба на левой стороне нижней поверхности шасси 120 расположены соответственно над первым выталкивателем 3150 и вторым выталкивателем 3160, при движении АУТ 200 шасси 120 в конечном итоге будет зажато внутри устройства вторичного позиционирования 300, и нижняя поверхность шасси 120 будет находиться в контакте с верхними поверхностями двух левых зажимных механизмов 310 и двух правых зажимных механизмов 320. После этого приводное устройство на нижней поверхности шасси 120 вращается, заставляя две шейки коленчатого вала 121 поворачиваться вверх и вниз, и первый выталкиватель 3150 испытывает нажим соответствующих шеек вала и начинает падать, и второй выталкиватель 3160 поднимается синхронно под влиянием отношения связи, и одновременно с этим зажимный блок 3141 синхронно испытывает прижим вниз, в конечном итоге зажимный блок 3141 будет прижат к верхней поверхности шасси 120, блокируя движение шасси 120 в вертикальном направлении.
Правый зажимный механизм 320 имеет все конструктивные признаки левого зажимного механизма 310, и правый зажимный механизм 320 также включает защитный стержень 3240, и правый установочный блок правого зажимного механизма 320 снабжен защитным отверстием на боковой стенке, обращенной к правой поверхности шасси 120, причем ось защитного отверстия перпендикулярна боковой поверхности шасси 120, защитный стержень 3240 входит в защитное отверстие и скользит по оси последнего. Один конец защитного стержня 3240, дальний от шасси 120, соединен с возможностью вращения с верхним соединительным стержнем 3220 правого зажимного механизма 320 посредством соединительной детали 3230, зажимный блок расположен на одном конце верхнего соединительного стержня 3220, и два конца соединительной детали 3230 соединены с возможностью вращения с защитным стержнем 3240 и верхним соединительным стержнем 3220; когда верхний соединительный стержень 3220 вращается в направлении к шасси 120, зажимный блок прижимается к верхней поверхности шасси 120, при этом защитный стержень 3240 движется к шасси 120 движением соединительной детали 3230, и в заключение плотно прижимается к боковой поверхности шасси 120, этим блокируя шасси 120 в горизонтальном направлении.
После того как шасси 120 будет заблокировано левым зажимным механизмом 310 и правым зажимным механизмом 320, левое устройство позиционирования 330, правое устройство позиционирования 340, и заднее устройство позиционирования 350 используются для позиционирования шасси 120 при взаимодействии с устройствами измерения ошибки, расположенными на шасси 120, чтобы повысить точность позиционирования промышленного робота 100.
Хотя выше описаны предпочтительные варианты осуществления изобретения, специалисты в данной области техники могут внести дополнительные изменения и модификации в эти варианты осуществления после того, как они поймут базовую идею изобретения. Поэтому прилагаемая формула изобретения предназначена для истолкования как включающая предпочтительные варианты осуществления и все изменения и модификации, подпадающие под объем изобретения.
Очевидно, что специалисты в данной области техники могут вносить разные модификации и изменения в изобретение, но без нарушения сущности и объема изобретения. В таком случае, если эти модификации и изменения в изобретении подпадают под объем формулы изобретения или технологии, эквивалентные ему, изобретение также считается включающим эти модификации и изменения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ЗАКРУЧИВАНИЯ БОЛТОВ ДЛЯ НИЖНЕЙ ТЯГИ | 2015 |
|
RU2693348C1 |
| Интервенционная автоматизированная операционная система | 2022 |
|
RU2801157C1 |
| АВТОНОМНОЕ УСТРОЙСТВО ДЛЯ ОБРАБОТКИ ПОВЕРХНОСТИ | 2012 |
|
RU2593113C2 |
| МЕХАНИЗМ РАСКРЫТИЯ И ЗАКРЫВАНИЯ ФОРМ ДЛЯ СЕКЦИОННОЙ МАШИНЫ (ВАРИАНТЫ), СЕКЦИОННАЯ МАШИНА (ВАРИАНТЫ) | 1998 |
|
RU2187468C2 |
| МОБИЛЬНАЯ АВТОНОМНАЯ РОБОТОТЕХНИЧЕСКАЯ ПЛАТФОРМА С БЛОЧНОЙ ИЗМЕНЯЕМОЙ СТРУКТУРОЙ | 2019 |
|
RU2704048C1 |
| УСТРОЙСТВО И СПОСОБ УПРАВЛЕНИЯ ЗАЖИМНЫМ УСИЛИЕМ ПРОВОЛОЧНОГО ПРОВОДНИКА ДЛЯ ИНТЕРВЕНЦИОННОГО ХИРУРГИЧЕСКОГО РОБОТА | 2021 |
|
RU2762487C1 |
| СЕКЦИОННАЯ МАШИНА (ВАРИАНТЫ) | 1998 |
|
RU2198143C2 |
| УСТРОЙСТВО И СПОСОБ ФРИКЦИОННОЙ ОБРАТНОЙ СВЯЗИ ПРОВОЛОЧНОГО ПРОВОДНИКА ДЛЯ ИНТЕРВЕНЦИОННОГО ХИРУРГИЧЕСКОГО РОБОТА | 2021 |
|
RU2759486C1 |
| МЕХАНИЗМ РАСКРЫТИЯ И ЗАКРЫВАНИЯ ФОРМ ДЛЯ СЕКЦИОННОЙ МАШИНЫ | 1998 |
|
RU2205159C2 |
| УСТРОЙСТВО ДЛЯ СОЕДИНЕНИЯ ПОЛОС | 2007 |
|
RU2404038C2 |
Изобретение раскрывает устройство вторичного позиционирования высокоточного мобильного робота и относится к области техники промышленных роботов. Устройство позволяет взаимодействовать с усовершенствованным шасси промышленного робота, чтобы выполнить быстрое зажимание и отпускание шасси промышленного робота, и включает шасси промышленного робота, устройство позиционирования, зажимный механизм. Устройство позиционирования выполняет полное позиционирование промышленного робота по принципу шеститочечного позиционирования, и зажимный механизм прижимает шасси к позиционирующей поверхности устройства позиционирования. Усовершенствованное шасси промышленного робота снабжено коленчатым валом, соответствующим каждому зажимному механизму, приводное устройство на шасси заставляет вращаться коленчатый вал, который может заставлять зажимный механизм зажимать, блокировать или быстро отпускать шасси. Техническим результатом является обеспечение позиционирования, зажимания и блокировки робота при работе и повышает жесткость и точность промышленного робота. 4 з.п. ф-лы, 5 ил.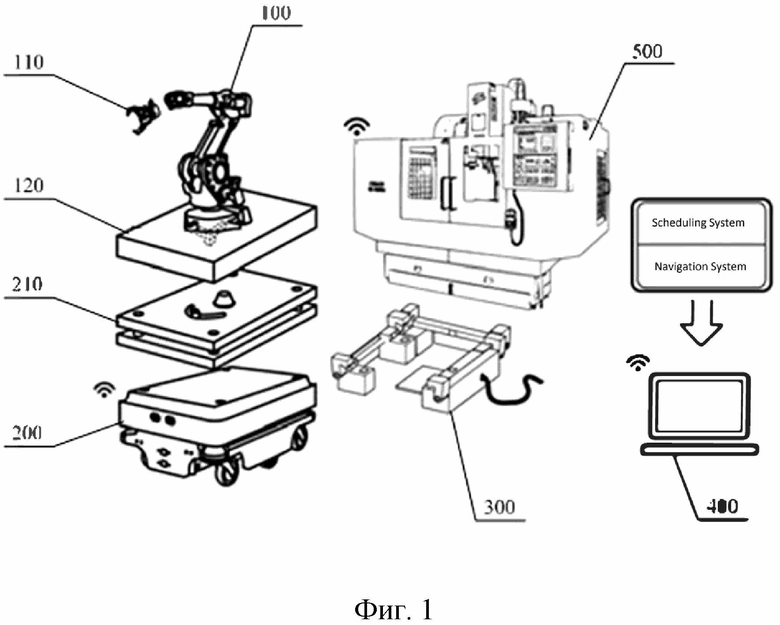
1. Устройство вторичного позиционирования высокоточного мобильного робота, включающее устройство вторичного позиционирования, расположенное на рабочей станции, промышленный робот транспортируется тележкой АУТ к устройству вторичного позиционирования, и шасси промышленного робота блокируется устройством вторичного позиционирования, устройство вторичного позиционирования включает несколько зажимных механизмов и несколько устройств позиционирования, упомянутые несколько зажимных механизмов расположены на левой и правой сторонах рабочей станции, упомянутые несколько устройств позиционирования расположены в разных местах рабочей станции; зажимное устройство включает установочный блок и рычажный механизм, установочный блок зафиксирован и расположен на рабочей станции, рычажный механизм расположен на установочном блоке, рычажный механизм включает зажимный блок, нижняя поверхность шасси промышленного робота снабжена приводным устройством и коленчатым валом, соединенным с приводным устройством, коленчатый вал имеет две шейки вала, эти две шейки вала взаимодействуют с рычажным механизмом, когда приводное устройство заставляет коленчатый вал вращаться, две шейки вала приводят в действие рычажный механизм, зажимный блок в рычажном механизме опускается или поднимается и шасси промышленного робота блокируется или разблокируется, при этом верхний конец первого выталкивателя, верхний конец второго выталкивателя и нижняя поверхность зажимного блока снабжены прокладками.
2. Устройство вторичного позиционирования высокоточного мобильного робота по п. 1, в котором зажимный механизм включает два левых зажимных механизма и два правых зажимных механизма одинаковой конструкции, два левых зажимных механизма соответственно расположены на двух концах на левой стороне рабочей станции, два правых зажимных механизма соответственно расположены на двух концах на правой стороне рабочей станции, левый зажимный механизм включает нижний установочный вал, средний установочный вал и верхний установочный вал, соответственно расположенные с возможностью вращения на левой установочном блоке; нижний установочный вал зафиксирован и соединен с нижним соединительным стержнем, средний установочный вал зафиксирован и соединен с двумя средними соединительными стержнями, верхний установочный вал зафиксирован и соединен с двумя верхними соединительными стержнями, один конец нижнего соединительного стержня соединен с возможностью вращения со средним соединительным стержнем посредством первого соединительного стержня, нижний соединительный стержень также соединен с возможностью вращения с верхним соединительным стержнем посредством второго соединительного стержня; на верхней поверхности левого установочного блока выполнены два сквозных отверстия, первый выталкиватель и второй выталкиватель входят в соответственные два сквозных отверстия, и первый выталкиватель соединен с возможностью вращения с точкой соединения первого соединительного стержня и среднего соединительного стержня посредством третьего соединительного стержня, второй выталкиватель соединен с возможностью вращения с другим средним соединительным стержнем посредством четвертого соединительного стержня, один конец другого верхнего соединительного стержня расположен над левым установочным блоком и зажимный блок расположен с возможностью вращения на одном конце верхнего соединительного стержня.
3. Устройство вторичного позиционирования высокоточного мобильного робота по п. 2, в котором шасси промышленного робота снабжено двумя желобами на левой и правой сторонах нижней поверхности и положения двух желобов на левой стороне соответствуют положениям первого выталкивателя и второго выталкивателя, коленчатый вал расположен с возможностью вращения в двух желобах, коленчатый вал имеет две шейки вала в противоположных направлениях, две шейки вала расположены в соответственных двух желобах, один конец коленчатого вала соединен с приводным устройством, проходя через боковую стенку желоба.
4. Устройство вторичного позиционирования высокоточного мобильного робота по п. 2, в котором правый зажимный механизм также включает защитный стержень и правый зажимный механизм включает правый установочный блок и правый рычажный механизм, правый установочный блок снабжен защитным отверстием на боковой стенке, обращенной к правой боковой поверхности шасси, ось защитного отверстия перпендикулярна боковой поверхности шасси, защитный стержень входит в защитное отверстие и скользит по оси защитного отверстия, один конец защитного стержня, дальний от шасси, соединен с возможностью вращения с верхним соединительным стержнем правого рычажного механизма посредством соединительной детали, зажимный блок расположен на одном конце верхнего соединительного стержня.
5. Устройство вторичного позиционирования высокоточного мобильного робота по п. 1, в котором устройства позиционирования включают левое устройство позиционирования, правое устройство позиционирования и заднее устройство позиционирования, левое устройство позиционирования расположено на и прикреплено к зажимному устройству на левой стороне рабочей станции, правое устройство позиционирования расположено на правой стороне рабочей станции и заднее устройство позиционирования расположено на задней стороне рабочей станции.
| CN 104213206 A, 17.12.2014 | |||
| CN 208053381 U, 06.11.2018 | |||
| Манипулятор | 1986 |
|
SU1341019A1 |
| CN 105945998 A, 21.09.2016 | |||
| CN 103042499 A, 17.04.2013. | |||

