Область техники
Настоящее изобретение относится к области малоинвазивных методов лечения кровеносных сосудов, и в частности, к устройству и способу управления зажимным усилием проволочного проводника интервенционного операционного робота.
Уровень техники
Малоинвазивная интервенционная терапия сердечно-сосудистых и цереброваскулярных заболеваний является основным лечением сердечно-сосудистых и цереброваскулярных заболеваний. По сравнению с традиционной хирургией, она обладает очевидными преимуществами, такими как небольшой разрез и короткий период постоперационного восстановления.
Сердечно-цереброваскулярное вмешательство представляет собой процесс, в ходе которого врач вручную вводит в тело пациента катетеры, проволочные проводники и стенты для завершения лечения.
Интервенционная хирургия имеет следующие две проблемы. Во-первых, в ходе операции, вследствие того, что при дигитальной субтракционной ангиографии (DSA) происходит излучение рентгеновских лучей, быстро падает физическая сила врача, а также внимание и устойчивость, что приводит к снижению точности операции и может вызвать несоответствующее толкающее усилие, приводящее к несчастным случаям, таким как повреждение интимы сосудов, перфорация и разрыв сосудов, и подвергающее опасности жизни пациентов. Во-вторых, кумулятивное повреждение, вызванное длительным ионизационным излучением, существенно повышает риск заболевания врачей лейкемией, раком и острой катарактой. Феномен того, что врачи непрерывно аккумулируют излучение вследствие интервенционной хирургии, стал проблемой, которую нельзя игнорировать, так как наносится ущерб профессиональной жизни врачей и ограничивается развитие интервенционной хирургии.
Хирургический метод телеуправления катетерами и проволочными проводниками с помощью роботизированной технологии позволяет эффективно справиться с данной проблемой, а также существенно повысить точность и стабильность хирургической операции. В то же время, может эффективно снизить вред излучения, наносимый врачам интервенционной терапии, а также уменьшить вероятность несчастных случаев, происходящих во время операции. Таким образом, все больше и больше внимания уделяется вспомогательному роботу для сердечно-цереброваскулярной интервенционной хирургии, и постепенно он становится ключевым объектом исследований и развития в области медицинских роботов в современных странах с высоким уровнем развития науки и техники.
В роботизированной хирургии, зажим проволочного проводника является основой для продвижения и вращения, однако проблема, связанная с чрезмерным натягиванием или чрезмерным ослаблением, в большинстве случаев происходит при зажиме. Чрезмерное натягивание может легко привести к повреждению проволочного проводника, а чрезмерное ослабление может легко произойти при надавливании или проскальзывании в ходе вращения; тем не менее, в основном, в известном уровне техники, нет устройства для измерения зажимного усилия, и, следовательно, зажимное усилие проволочного проводника не может регулироваться в любой момент времени. Таким образом, актуальной задачей для специалистов в данной области техники является создание устройства управления зажимным усилием проволочного проводника для интервенционного хирургического робота.
Краткое описание изобретения
Следовательно, настоящее изобретение направлено на создание устройства управления зажимным усилием проволочного проводника интервенционного операционного робота, которое решает задачи, связанные с возможностью измерения и регулирования зажимного усилия проволочного проводника по мере возникновения необходимости.
Изобретение обеспечивает устройство управления зажимным усилием проволочного проводника, включающее:
приводной узел, две стороны которого соответственно соединены с приводной частью, и две приводные части выполнены с возможностью синхронного приведения в движение приводного узла для перемещения вперед или назад вдоль направления, перпендикулярного направлению продвижения проволочного проводника; и
ведомый узел, включающий соединительную пластину, высокоточный тензодатчик, микролинейную рельсовую направляющую ведомого узла, скользящий блок ведомого узла, соединительный элемент ведомого узла и пассивный намоточный узел; на стороне соединительной пластины рядом с проволочным проводником неподвижно закреплен высокоточный тензодатчик, и на верхней стороне неподвижно закреплена микролинейная рельсовая направляющая ведомого узла; на верхней части скользящего блока ведомого узла неподвижно закреплен соединительный элемент ведомого узла, выполненный с возможностью скольжения по микролинейной рельсовой направляющей ведомого узла; в верхней части соединительного элемента ведомого узла неподвижно закреплен пассивный намоточный узел, сопряженный с активным намоточным узлом приводного узла для намотки проволочного проводника; высокоточный тензодатчик выполнен с возможностью передачи изменяющегося сигнала принятого усилия в процессе зажима при намотке проволочного проводника на управляющий конец приводного узла приводного механизма робота.
Согласно вышеуказанному техническому решению, по сравнению с известным уровнем техники, настоящее изобретение раскрывает устройство управления зажимным усилием проволочного проводника для интервенционного хирургического робота, приводной узел перемещается вперед или назад в направлении, перпендикулярном направлению намотки проволочного проводника, с помощью приводной части. Высокоточный тензодатчик, расположенный на соединительной пластине, принимает сигнал изменения усилия в процессе зажима при намотке проволочного проводника и передает сигнал изменения на управляющий конец приводного узла приводного механизма робота. Управляющий конец приводного узла приводного механизма робота определяет изменение зажимного усилия путем сравнения изменения значения ответного усилия и регулирует степень зажима проволочного проводника в соответствии с условием натяжения, так что робот устанавливает надлежащее зажимное усилие для завершения операции, и операция может быть выполнена безопасно и надежно. Тем временем, если зажимное усилие отклоняется от нормы (слишком большое или слишком маленькое), оператор может своевременно получить напоминание посредством управляющего конца главного конца приводного механизма робота, и приводной механизм робота представляется собой устройство обеспечения безопасности и помогает врачу лучше проводить интервенционное хирургическое лечение.
Соединительная пластина включает нижнюю соединительную пластину и верхнюю соединительную пластину; нижняя соединительная пластина включает соединенные в виде единой детали горизонтальную пластину и вертикальную пластину; на верхней части горизонтальной пластины на стороне рядом с проволочным проводником выполнена первая фиксирующая пластина датчика; на нижней части верхней соединительной пластины на стороне рядом с проволочным проводником выполнена вторая фиксирующая пластина датчика, расположенная в шахматном порядке относительно первой фиксирующей пластины датчика; первая фиксирующая пластина датчика и вторая фиксирующая пластина датчика имеют одинаковый размер, и на обеих выполнено первое установочное отверстие; и в высокоточном тензодатчике выполнено второе установочное отверстие, соответствующее положению первого установочного отверстия, первое установочное отверстие и второе установочное отверстие скреплены с помощью болтов. Таким образом, высокоточный тензодатчик соединяет вместе верхнюю соединительную пластину и нижнюю соединительную пластину.
Пассивный намоточный узел проволочного проводника включает фиксирующую пластину, электромагнит ведомого узла и активный блок ведомого узла; в верхней части соединительного элемента ведомого узла неподвижно закреплена фиксирующая пластина, и на фиксирующей пластине вертикально закреплен электромагнит ведомого узла; электромагнит ведомого узла магнитно соединен с активным блоком ведомого узла, выполненным с возможностью зажатия проволочного проводника с подвижным блоком приводного узла.
Третье, каждая приводная часть включает кронштейн двигателя, шаговый двигатель ходового винта, приводную соединительную пластину, винтовую гайку, микролинейную рельсовую направляющую приводного узла и приводной скользящий блок; нижняя часть кронштейна двигателя закреплена на корпусе, и средняя часть кронштейна двигателя выполнена с возможностью вращения и поддерживания шагового двигателя ходового винта в направлении, перпендикулярном направлению намотки проволочного проводника; выходной конец шагового двигателя ходового винта проходит через приводную соединительную пластину и совмещается с винтовой гайкой, закрепленной на приводной соединительной пластине; на стороне приводного узла закреплена приводная соединительная пластина, и на стороне приводной соединительной пластины расположен приводной скользящий блок; приводной скользящий блок выполнен с возможностью скольжения по микролинейной рельсовой направляющей приводного узла, закрепленной на боковой стенке корпуса.
Настоящее изобретение также обеспечивает способ управления зажимным усилием проволочного проводника для интервенционного хирургического робота, и применяется устройство управления зажимным усилием проволочного проводника для интервенционного хирургического робота. Приводной узел перемещается вперед или назад в направлении, перпендикулярном направлению намотки проволочного проводника, с помощью приводной части. Высокоточный тензодатчик, расположенный на соединительной пластине, принимает сигнал изменения усилия в процессе зажима при намотке проволочного проводника и передает сигнал изменения на управляющий конец приводного узла приводного механизма робота. Управляющий конец приводного узла приводного механизма робота определяет изменение зажимного усилия путем сравнения изменения значения ответного усилия и регулирует степень зажима проволочного проводника в соответствии с условием натяжения, так что робот устанавливает надлежащее зажимное усилие для завершения операции, и операция может быть выполнена безопасно и надежно. Тем временем, если зажимное усилие отклоняется от нормы (слишком большое или слишком маленькое), оператор может своевременно получить напоминание посредством управляющего конца главного конца приводного механизма робота, и приводной механизм робота представляется собой устройство обеспечения безопасности и помогает врачу лучше проводить интервенционное хирургическое лечение.
Краткое описание чертежей
С целью более ясного объяснения вариантов осуществления настоящего изобретения или технических решений известного уровня техники, кратко представлены следующие чертежи, которые необходимо использовать в описании вариантов осуществления изобретения или известного уровня техники. Очевидно, что чертежи в последующем описании представляют собой только варианты осуществления настоящего изобретения. Специалистами в данной области техники, могут быть получены другие чертежи на основе представленных чертежей без приложения творческих усилий.
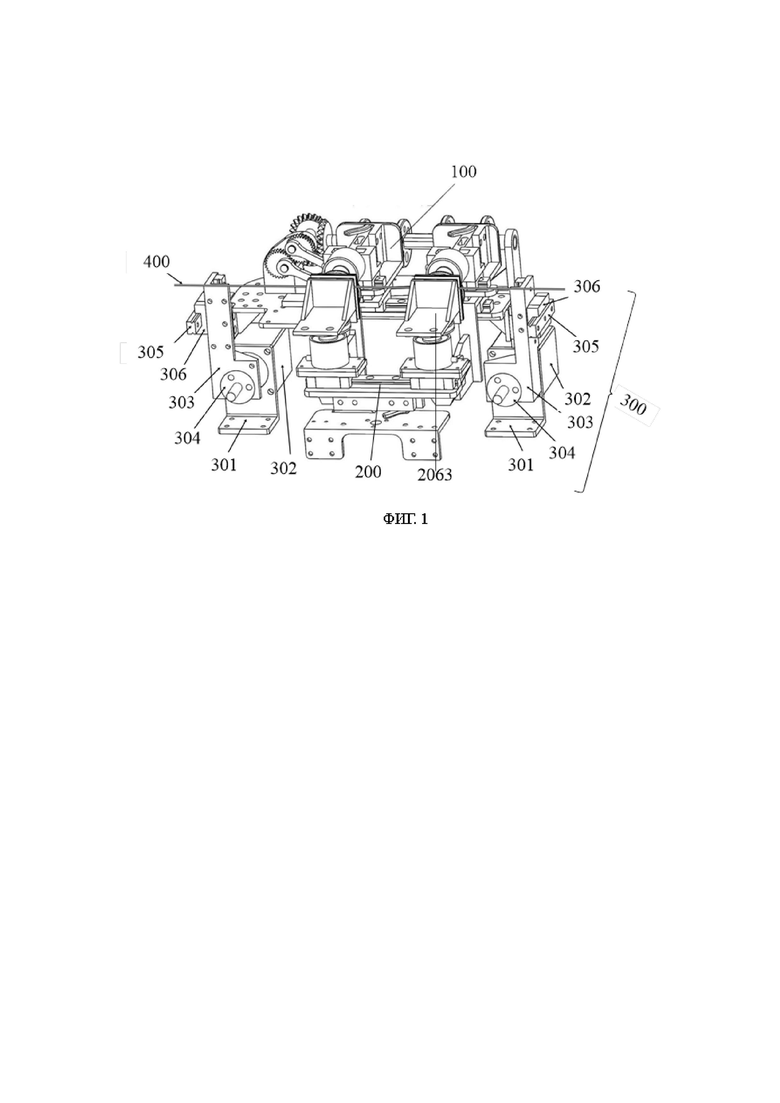
ФИГ. 1 представляет собой структурное схематическое изображение устройства управления зажимным усилием проволочного проводника для интервенционного робота согласно настоящему изобретению;
ФИГ. 2 представляет собой общее схематическое изображение ведомого узла;
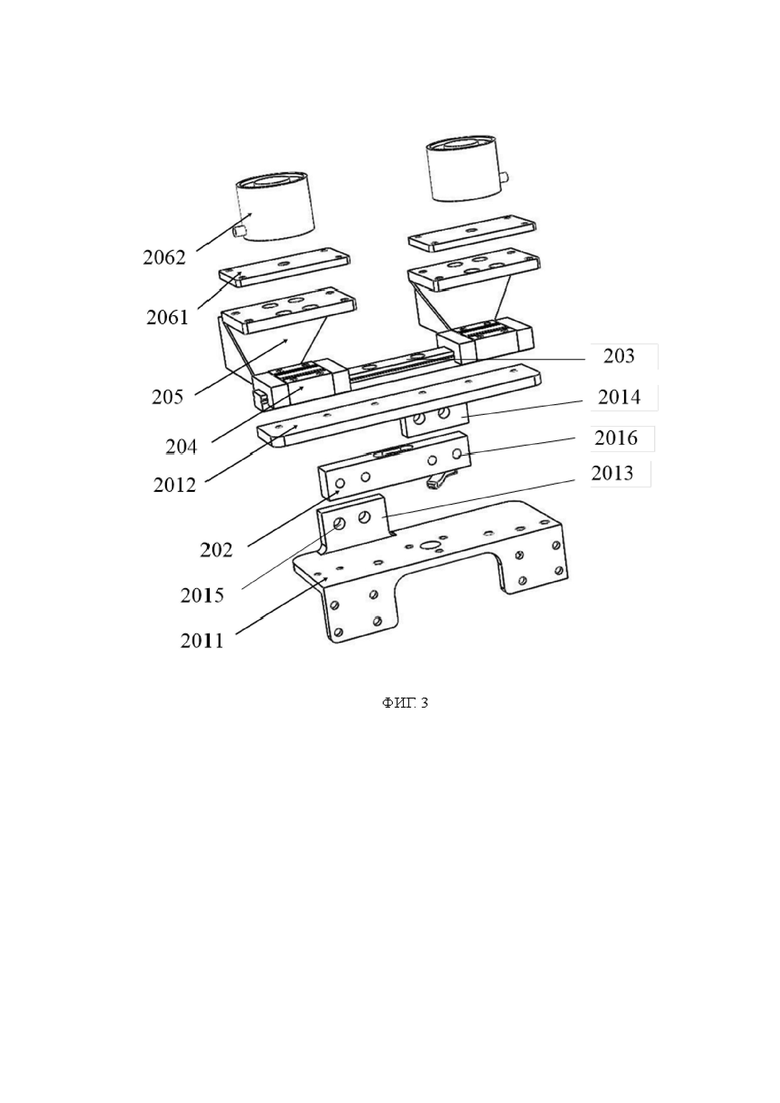
ФИГ. 3 представляет собой изображение ведомого узла в разобранном виде.
На чертежах:
100-приводной узел, 200-ведомый узел, 201-соединительная пластина, 2011-нижняя соединительная пластина, 2012-верхняя соединительная пластина, 2013-первая фиксирующая пластина датчика, 2014-вторая фиксирующая пластина датчика, 2015-первое установочное отверстие, 202-высокоточный тензодатчик, 2021-второе установочное отверстие, 203-микролинейная рельсовая направляющая ведомого узла, 204-скользящий блок ведомого узла, 205-соединительный элемент ведомого узла, 206-пассивный намоточный узел, 2061-фиксирующая пластина, 2062-электромагнит ведомого узла, 2063-активный блок ведомого узла, 300-приводная часть, 301-кронштейн двигателя, 302-шаговый двигатель ходового винта, 303-приводная соединительная пластина, 304-винтовая гайка, 305- микролинейная рельсовая направляющая приводного узла, 306-приводной скользящий блок, 400-проволочный проводник.
Подробное описание изобретения
Ниже подробно описаны варианты осуществления настоящего изобретения. Примеры вариантов осуществления изобретения приведены на прилагаемых чертежах, где одинаковые или аналогичные ссылочные позиции обозначают одинаковые или аналогичные элементы или элементы с одинаковыми или аналогичными функциями. Описанные ниже варианты осуществления изобретения со ссылкой на чертежи являются примерами и предназначены для объяснения настоящего изобретения, но не должны рассматриваться как ограничение настоящего изобретения.
В описании настоящего изобретения, следует понимать, что взаимное направление или расположение, обозначенные терминами "верхний", "нижний", "передний", "задний", "левый", "правый", "вертикальный", "горизонтальный", "верхняя часть", "нижняя часть", "внутренний", "внешний" и т.п., основаны на взаимном направлении и расположении, показанных на чертежах. Что удобно для описания изобретения и упрощения описания, а не указывает или подразумевает, что упомянутое устройство или элемент должны иметь определенную ориентацию, должны быть сконструированы и работать в определенной ориентации, и, следовательно, не должны рассматриваться как ограничение изобретения.
Более того, термины "первый" и "второй" используются только в описательных целях и не должны рассматриваться как указание или обозначение относительной важности или косвенное указание упомянутых технических признаков. Таким образом, признаки, определенные как "первый" и "второй", могут прямо или косвенно включать один или несколько таких признаков. В описании настоящего изобретения, значение "множество" равно двум или более, если специально не определено иное.
В настоящем изобретении, термины "установленный", "соединенный", "закрепленный" и т.п.следует рассматривать в широком смысле, например, соединенный неподвижно или съемный, или как одно целое, если специально не указано и не определено иное; могут представлять собой механическое соединение или электрическое соединение; они могут быть соединены прямо или косвенно через промежуточную среду, являться внутренними по отношению к двум элементам или находится в интерактивной взаимосвязи между двумя элементами. Конкретное значение вышеуказанных терминов в настоящем изобретении будет понятно специалистам в данной области техники, в зависимости от обстоятельств.
В настоящем изобретении, если специально не указано и не определено иное, ссылка на первый признак, являющийся "выше" или "ниже" второго признака, может включать ссылку на первый и второй признаки в прямом контакте, и ссылку на первый и второй признаки, не находящиеся в прямом контакте, но контактирующие посредством дополнительных признаков между ними. Кроме того, первый признак, расположенный "над", "выше" второго признака, включает первый признак, находящийся непосредственно над или наклонно над вторым признаком, или просто указывает, что первый признак расположен на более высоком уровне, чем второй признак. Если первый элемент находится «снизу», «ниже» и «под», вторым элементом, то первый элемент находит непосредственно под вторым элементом и по диагонали под вторым элементом, или просто указывает, что первый элемент расположен ниже второго элемента.
Ссылаясь на ФИГ. 1, вариант осуществления настоящего изобретения обеспечивает устройство управления зажимным усилием проволочного проводника для интервенционного хирургического робота, включающее:
приводной узел 100, две стороны которого соответственно соединены с приводной частью 300, и две приводные части 300 выполнены с возможностью синхронного приведения в движение приводного узла 100 для перемещения вперед или назад вдоль направления, перпендикулярного направлению продвижения проволочного проводника 400; и
ведомый узел 200, включающий соединительную пластину 201, высокоточный тензодатчик 202, микролинейную рельсовую направляющую ведомого узла 203, скользящий блок ведомого узла 204, соединительный элемент ведомого узла 205 и пассивный намоточный узел 206; на одной стороне соединительной пластины 201 рядом с проволочным проводником 400 неподвижно закреплен высокоточный тензодатчик 202, и на верхней стороне неподвижно закреплена микролинейная рельсовая направляющая ведомого узла 203; на верхней части скользящего блока ведомого узла 204 неподвижно закреплен соединительный элемент ведомого узла 205, выполненный с возможностью скольжения по микролинейной рельсовой направляющей ведомого узла 203; в верхней части соединительного элемента приводного узла неподвижно закреплен пассивный намоточный узел 206, сопряженный с активным намоточным узлом приводного узла 100 для намотки проволочного проводника; высокоточный тензодатчик выполнен с возможностью передачи изменяющегося сигнала принятого усилия в процессе зажима при намотке проволочного проводника на управляющий конец приводного узла приводного механизма робота.
Настоящее изобретение обеспечивает способ управления зажимным усилием проволочного проводника для интервенционного хирургического робота, и применяется устройство управления зажимным усилием проволочного проводника для интервенционного хирургического робота. Управляющий конец приводного узла приводного механизма робота определяет изменение зажимного усилия путем сравнения изменение значения ответного усилия и регулирует степень зажима проволочного проводника в соответствии с условием натяжения, так что робот устанавливает надлежащее зажимное усилие для завершения операции, и операция может быть выполнена безопасно и надежно. Тем временем, если зажимное усилие отклоняется от нормы (слишком большое или слишком маленькое), оператор может своевременно получить напоминание посредством управляющего конца главного конца приводного механизма робота, и приводной механизм робота представляется собой устройство обеспечения безопасности и помогает врачу лучше проводить интервенционное хирургическое лечение.
Ссылаясь на ФИГ. 2 и 3, соединительная пластина 201 включает нижнюю соединительную пластину 2011 и верхнюю соединительную пластину 2012; нижняя соединительная пластина 2011 включает соединенные в виде единой детали горизонтальную пластину и вертикальную пластину; на верхней части горизонтальной пластины на стороне рядом с проволочным проводником 400 выполнена первая фиксирующая пластина датчика 2013; на нижней части верхней соединительной пластины 2012 на стороне рядом с проволочным проводником 400 выполнена вторая фиксирующая пластина датчика 2014, расположенная в шахматном порядке относительно первой фиксирующей пластины датчика 2013; первая фиксирующая пластина датчика 2013 и вторая фиксирующая пластина датчика 2014 имеют одинаковый размер, и на обеих выполнено первое установочное отверстие 2015; и в высокоточном тензодатчике 202 выполнено второе установочное отверстие 2021, соответствующее положению первого установочного отверстия 2015, первое установочное отверстие 2015 и второе установочное отверстие 2021 скреплены с помощью болтов.
В частности, пассивный намоточный узел 206 включает фиксирующую пластину 2061, электромагнит ведомого узла и активный блок ведомого узла; в верхней части соединительного элемента ведомого узла 205 неподвижно закреплена фиксирующая пластина 2061, и на фиксирующей пластине 2061 вертикально закреплен электромагнит ведомого узла 2062; электромагнит ведомого узла 2062 магнитно соединен с активным блоком ведомого узла 2063, выполненный с возможностью зажима проволочного проводника 400 с подвижным блоком приводного узла.
Преимущественно, что каждая приводная часть 300 включает кронштейн двигателя 301, шаговый двигатель ходового винта 302, приводную соединительную пластину 303, винтовую гайку 304, микролинейную рельсовую направляющую 305 приводного узла и приводной скользящий блок 306; нижняя часть кронштейна двигателя 301 закреплена на корпусе, и средняя часть кронштейна двигателя выполнена с возможностью вращения и поддерживания в направлении, перпендикулярном направлению намотки проволочного проводника 400, шагового двигателя ходового винта 302; выходной конец шагового двигателя ходового винта 302 проходит через приводную соединительную пластину 303 и совмещается с винтовой гайкой 304, закрепленной на приводной соединительной пластине 303; на стороне приводного узла 100 закреплена приводная соединительная пластина 303, и на стороне приводной соединительной пластины 303 расположен приводной скользящий блок 306; приводной скользящий блок 306 выполнен с возможностью скольжения по микролинейной рельсовой направляющей 305 приводного узла, закрепленной на боковой стенке корпуса.
Настоящее изобретение также обеспечивает способ управления зажимным усилием проволочного проводника для интервенционного хирургического робота, и применяется устройство управления зажимным усилием проволочного проводника для интервенционного хирургического робота. Приводная часть приводит в движение приводной узел для перемещения вперед или назад в направлении, перпендикулярном направлению намотки проволочного проводника, в ходе процесса намотки проволочного проводника и зажима, высокоточный тензодатчик принимает изменение усилия и направляет его обратно на управляющий конец приводного механизма робота, и управляющий конец приводного механизма робота определяет зажимное усилие путем сравнения изменения значения ответного усилия и регулирует приводную часть для изменения зажимного усилия в соответствии с требованиями использования.
Точность высокоточного тензодатчика меньше или равна 0.01 Н. Высокоточный тензодатчик имеет подходящий размер и высокую чувствительность. Когда подвижный блок зажимает проволочный проводник, в высокоточный тензодатчик в передаче каждого компонента может быть внесено небольшое изменение. На таком управляющем конце главного конца приводного механизма робота, зажимное усилие определяется путем сравнения изменения числового значения высокоточного тензодатчика. Два конца высокоточного тензодатчика соответственно скреплены с верхней соединительной пластиной и нижней соединительной пластиной, при этом на верхней соединительной пластине выполнены микролинейная рельсовая направляющая приводного узла и электромагниты на двух концах, и нижняя соединительная пластина может быть закреплена посредством рельсовых направляющих и корпуса. Активный конец зажимаемого проволочного проводника согласован с высокоточным тензодатчиком при действии шагового винтового двигателя, так что можно управлять зажимным усилием проволочного проводника, т.е. двигатель вращается вперед, подвижный блок, притягиваемый электромагнитом на активном конце, перемещается вперед, и подвижный блок находится рядом с подвижным блоком ведомого узла, таким образом, зажимное усилие проволочного проводника увеличивается. Наоборот, двигатель меняет направление вращения, и зажимное усилие уменьшается.
Устройство управления зажимным усилием проволочного проводника может регулировать зажимное усилие при осуществлении инициализации после размещения проволочного проводника. Зажимное усилие можно установить самостоятельно, точка натяжения или точка ослабления может регулироваться в зависимости от фактических условий. Более того, изменение зажимного усилия можно наблюдать в любой момент времени в ходе операции, и зажимное усилие может регулироваться в любой момент времени при необходимости, так что зажимное устройство является более гибким при практическом использовании.
Таким образом, в настоящем изобретении применяется высокоточный тензодатчик для измерения зажимного усилия с высокой точностью. Зажимное усилие может регулироваться в любой момент времени путем управления шаговым двигателем ходового винта, и выполняются клинические требования. Вся конструкция является простой, компактной, устойчивой и легкой в эксплуатации. Является важным звеном во всем роботе.
В описании настоящего изобретения, ссылка на описание терминов “один вариант осуществления изобретения”, “некоторые варианты осуществления изобретения”, “пример”, “конкретный пример”, “некоторые примеры” или т.п.предназначена для ссылки на конкретные признаки, конструкции, материалы или признаки, которые включают в себя, по меньшей мере, один вариант осуществления или пример изобретения. В описании изобретения, схематические представления вышеуказанных терминов необязательно направлены на одни и те же варианты осуществления изобретения и примеры. Более того, определенные признаки, конструкции, материалы или описанные признаки могут сочетаться подходящим образом в любом одном или нескольких вариантах осуществления изобретения или примерах. Кроме того, специалисты в данной области техники могут объединять и комбинировать различные варианты осуществления изобретения или примеры, представленные в данном описании изобретения.
Несмотря на то, что варианты осуществления настоящего изобретения представлены и описаны выше, следует понимать, что описанные выше варианты осуществления изобретения являются примерными и не должны рассматриваться как ограничение изобретения. Вариации, модификации, замены и вариации вышеописанных вариантов осуществления изобретения могут быть сделаны специалистом в данной области техники в пределах объема настоящего изобретения.

Группа изобретений относится к медицине, а именно к способам и устройствам управления зажимным усилием проволочного проводника для интервенционного хирургического робота. Устройство содержит приводной узел и ведомый узел. Две стороны приводного узла соединены с приводной частью. Две приводные части выполнены с возможностью синхронного приведения в движение приводного узла для перемещения вперед или назад вдоль направления, перпендикулярного направлению продвижения проволочного проводника. Ведомый узел включает соединительную пластину, тензодатчик, микролинейную рельсовую направляющую ведомого узла, скользящий блок ведомого узла, соединительный элемент ведомого узла и пассивный намоточный узел. На одной стороне соединительной пластины неподвижно закреплен тензодатчик. На верхней стороне неподвижно закреплена микролинейная рельсовая направляющая ведомого узла. На верхней части скользящего блока ведомого узла неподвижно закреплен соединительный элемент ведомого узла, выполненный с возможностью скольжения по микролинейной рельсовой направляющей ведомого узла. На верхней части соединительного элемента ведомого узла неподвижно закреплен пассивный намоточный узел, сопряженный с активным намоточным узлом приводного узла. Тензодатчик выполнен с возможностью передачи изменяющегося сигнала принятого усилия в процессе зажима при намотке проволочного проводника на управляющий конец приводного узла приводного механизма робота. Достигается возможность измерения и регулирования зажимного усилия проволочного проводника по мере возникновения необходимости. 2 н. и 3 з.п. ф-лы, 3 ил.
1. Устройство управления зажимным усилием проволочного проводника для интервенционного хирургического робота, содержащее:
приводной узел (100), две стороны которого соответственно соединены с приводной частью (300), и две приводные части (300) выполнены с возможностью синхронного приведения в движение приводного узла (100) для перемещения вперед или назад вдоль направления, перпендикулярного направлению продвижения проволочного проводника (400); и
ведомый узел (200), включающий соединительную пластину (201), тензодатчик (202), микролинейную рельсовую направляющую ведомого узла (203), скользящий блок ведомого узла (204), соединительный элемент ведомого узла (205) и пассивный намоточный узел (206);
при этом на одной стороне соединительной пластины (201) неподвижно закреплен тензодатчик (202), и на верхней стороне неподвижно закреплена микролинейная рельсовая направляющая ведомого узла (203);
на верхней части скользящего блока ведомого узла (204) неподвижно закреплен соединительный элемент ведомого узла (205), выполненный с возможностью скольжения по микролинейной рельсовой направляющей ведомого узла (203);
на верхней части соединительного элемента ведомого узла (205) неподвижно закреплен пассивный намоточный узел (206), сопряженный с активным намоточным узлом приводного узла (100);
тензодатчик (202) выполнен с возможностью передачи изменяющегося сигнала принятого усилия в процессе зажима при намотке проволочного проводника на управляющий конец приводного узла приводного механизма робота.
2. Устройство управления зажимным усилием проволочного проводника для интервенционного хирургического робота по п.1, отличающееся тем, что соединительная пластина (201) включает нижнюю соединительную пластину (2011) и верхнюю соединительную пластину (2012);
нижняя соединительная пластина (2011) включает соединенные в виде единой детали горизонтальную пластину и вертикальную пластину; на верхней части горизонтальной пластины выполнена первая фиксирующая пластина датчика (2013);
на нижней части верхней соединительной пластины (2012) выполнена вторая фиксирующая пластина датчика (2014), расположенная в шахматном порядке относительно первой фиксирующей пластины датчика (2013);
первая фиксирующая пластина датчика (2013) и вторая фиксирующая пластина датчика (2014) имеют одинаковый размер, и на обеих выполнено первое установочное отверстие (2015); и
в тензодатчике (202) выполнено второе установочное отверстие (2021), соответствующее положению первого установочного отверстия (2015), первое установочное отверстие (2015) и второе установочное отверстие (2021) скреплены с помощью болтов.
3. Устройство управления зажимным усилием проволочного проводника для интервенционного хирургического робота по п.1, отличающееся тем, что пассивный намоточный узел (206) включает фиксирующую пластину (2061), электромагнит ведомого узла и активный блок ведомого узла; на верхней части соединительного элемента ведомого узла (205) неподвижно закреплена фиксирующая пластина (2061), и на фиксирующей пластине (2061) вертикально закреплен электромагнит ведомого узла (2062); электромагнит ведомого узла (2062) магнитно соединен с активным блоком ведомого узла (2063), выполненным с возможностью зажима проволочного проводника (400) с подвижным блоком приводного узла.
4. Устройство управления зажимным усилием проволочного проводника для интервенционного хирургического робота по п.1, отличающееся тем, что каждая приводная часть (300) включает кронштейн двигателя (301), шаговый двигатель ходового винта (302), приводную соединительную пластину (303), винтовую гайку (304), микролинейную рельсовую направляющую (305) приводного узла и приводной скользящий блок (306); нижняя часть кронштейна двигателя (301) закреплена на корпусе, и средняя часть кронштейна двигателя выполнена с возможностью вращения и поддерживания шагового двигателя ходового винта (302) перпендикулярно направлению намотки проволочного проводника (400);
выходной конец шагового двигателя ходового винта (302) проходит через приводную соединительную пластину (303) и совмещается с винтовой гайкой (304), закрепленной на приводной соединительной пластине (303);
на стороне приводного узла (100) закреплена приводная соединительная пластина (303), и на стороне приводной соединительной пластины (303) расположен приводной скользящий блок (306);
приводной скользящий блок (306) выполнен с возможностью скольжения по микролинейной рельсовой направляющей (305) приводного узла, закрепленной на боковой стенке корпуса.
5. Способ управления устройством зажимного усилия проволочного проводника для интервенционного хирургического робота по любому из пп.1-4, включающий:
приведение в движение, с помощью приводной части, приводного узла для перемещения вперед или назад в направлении, перпендикулярном направлению намотки проволочного проводника;
определение, с помощью тензодатчика, изменения усилия в процессе намотки проволочного проводника и зажима и передачу изменения усилия обратно на управляющий конец приводного механизма робота; и
определение, с помощью управляющего конца приводного механизма робота, зажимного усилия путем сравнения изменения значения ответного усилия и регулирование приводной части для изменения зажимного усилия соответственно.
| US 9795447 B2, 24.10.2017 | |||
| КОНЦЕВОЙ ЭФФЕКТОР С ШАРНИРНЫМ УЗЛОМ И ПРИВОД ЭНДОСКОПИЧЕСКОГО ХИРУРГИЧЕСКОГО АППАРАТА | 2016 |
|
RU2636853C2 |
| US 20170027653 A1, 02.02.2017 | |||
| US 20180326181 A1, 15.11.2018 | |||
| US 9549783 B2, 24.01.2017. | |||

