Область техники, к которой относится изобретение
Настоящее изобретение относится к области способов определения географического местоположения устройства передачи радиосигнала, в частности, устройств передачи сигнала, относящихся к области Интернета вещей. Более конкретно, настоящее изобретение относится к определению географического местоположения устройства передачи сигнала в контексте расширенной глобальной вычислительной сети, содержащей множество шлюзов концентрации данных.
Уровень техники
Концепция Интернета вещей состоит том, чтобы позволить предметам автоматически обмениваться данными с беспроводной сетью. Например, счетчик воды, оснащенный модулем связи, может автоматически передавать показания расхода воды в компанию, осуществляющую выставление счетов за потребление воды.
Шлюзы концентрации сообщений, также называемые станциями, выполняют функцию обеспечения приема и передачи данных от модулей связи и в модули связи, находящиеся в их зоне покрытия, а также ретрансляции этих данных в оборудование, отвечающее за их обработку, например, на серверы, которые могут быть доступны по сети на основе протокола IP («межсетевой протокол»).
Для реализации сетей модулей связи доступно несколько технологий радиодоступа. Исключительно иллюстративными и неограничивающими примерами, которые можно привести, являются технологии LoRa™, Sigfox™ или даже WM-Bus («Wireless Meter Bus»), которые, в частности, основаны на различных типах модуляции. Общим для этих технологий является то, что они обеспечивают связь на большие расстояния, что позволяет сократить количество шлюзов за счет увеличения их покрытия.
В некоторых ситуациях может потребоваться определение географического местоположения определенных предметов, передающих радиосигналы. Это может иметь место, например, в случае передатчиков, связанных с подвижными предметами, например, поддонами для транспортировки продуктов или т.п. Для таких случаев известна практика использования спутникового наведения (GPS). Однако использование компонентов, позволяющих определять местоположение с помощью данных GPS, может быть сложным, дорогостоящим и энергоемким для устройства передачи сигнала и, следовательно, подходит не для всех применений или не для всех устройств передачи сигнала.
Также, например, из документа US2010/0138184 A1, известен способ определения географического местоположения путем триангуляции с использованием данных приема на основе сигнала, переданного устройством передачи сигнала на множество радиоприемников. Такие данные приема представляют собой, например, дату приема сигнала или даже уровень мощности радиосигнала, принятого разными приемниками. Однако такой способ триангуляции имеет ограниченную точность и не позволяет определять географическое местоположение устройства передачи сигнала с удовлетворительной надежностью.
Следовательно, существует необходимость обеспечения способа определения географического местоположения устройства передачи радиосигнала, который не является сложным, обеспечивает уменьшенное энергопотребление и высокую надежность.
Сущность изобретения
Настоящее изобретение позволяет удовлетворить эти потребности. Одна идея, на которой основано изобретение, заключается в обеспечении возможности определения географического местоположения устройства передачи радиосигнала без увеличения энергопотребления упомянутого устройства передачи радиосигнала. Одна идея, на которой основано изобретение, заключается в обеспечении возможности определения географического местоположения устройства передачи радиосигнала без увеличения сложности упомянутого устройства передачи радиосигнала. Одна идея, на которой основано изобретение, заключается в обеспечении возможности определения географического местоположения устройства передачи радиосигнала с удовлетворительной степенью точности. Одна идея, на которой основано изобретение, заключается в определении географического местоположения устройства передачи радиосигнала с использованием инфраструктуры сети связи, обменивающейся данными с упомянутым устройством передачи радиосигнала. Одна идея, на которой основано изобретение, заключается в обеспечении возможности определения географического местоположения устройства передачи радиосигнала с удовлетворительной надежностью.
Для этого изобретение предлагает способ определения географического местоположения устройства передачи сигнала, в котором упомянутое устройство передачи сигнала передает радиосигнал, причем способ определения географического местоположения содержит этапы, на которых:
a) предоставляют положения множества приемных станций сети радиосвязи и даты приема радиосигнала упомянутыми приемными станциями,
b) выбирают опорную станцию из множества приемных станций,
c) определяют зону сканирования в зависимости от упомянутых положений приемных станций,
d) подразделяют зону сканирования на множество подзон в зависимости от шага сканирования,
e) для каждой подзоны вычисляют степень суммарной погрешности упомянутой подзоны, причем вычисление степени суммарной погрешности упомянутой подзоны содержит этапы, на которых:
определяют проверяемое положение, включенное в упомянутую подзону,
вычисляют для каждой приемной станции соответствующий параметр погрешности передачи в зависимости от даты приема радиосигнала упомянутой приемной станцией, даты приема радиосигнала опорной станцией, скорости распространения радиосигнала, расстояния между проверяемым положением и упомянутой приемной станцией и расстояния между проверяемым положением и опорной станцией,
вычисляют степень суммарной погрешности подзоны в зависимости от параметров погрешности передачи, вычисленных для всех приемных станций,
f) выбирают подзону, имеющую минимальную степень суммарной погрешности, в качестве подзоны местоположения устройства передачи сигнала,
g) определяют новую зону сканирования, причем новая зона сканирования включает в себя и центрирована в подзоне местоположения, выбранной на этапе f),
h) определяют новый шаг сканирования меньший, чем шаг сканирования,
i) повторяют способ с этапа d) с новой зоной сканирования в качестве зоны сканирования и новым шагом в качестве шага.
Благодаря использованию такого способа можно получить географическое местоположение устройства передачи радиосигнала без необходимости модификации устройства передачи сигнала. В частности, способ в соответствии с изобретением позволяет определять географическое местоположение устройства передачи радиосигнала без увеличения его сложности или энергопотребления. Кроме того, способ в соответствии с изобретением за счет последовательных итераций позволяет определять географическое местоположение устройства передачи сигнала с высокой точностью определения географического местоположения.
В соответствии с другими предпочтительными вариантами осуществления такой способ определения географического местоположения может иметь один или более следующих признаков.
В соответствии с одним вариантом осуществления на каждой итерации новую зону сканирования определяют на этапе h) как равную подзоне местоположения, выбранной на этапе f), дополненной допуском, полностью окружающим подзону местоположения, ширина которого больше, чем шаг сканирования. Благодаря этим признакам способ определения географического местоположения обеспечивает удовлетворительную надежность определения географического местоположения.
В соответствии с одним вариантом осуществления определение зоны сканирования содержит этап, на котором определяют максимальное значение долготы приемных станций, минимальное значение долготы приемных станций, максимальное значение широты приемных станций, минимальное значение широты приемных станций, причем зона сканирования ограничена упомянутыми максимальными и минимальными значениями долготы и широты. В соответствии с одним вариантом осуществления определение зоны сканирования также содержит этап, на котором добавляют допуск к зоне сканирования, ограниченной максимальными и минимальными значениями долготы и широты приемных станций.
В соответствии с одним вариантом осуществления способ содержит количество итераций больше 3, например, равное 7. Благодаря этим признакам можно получить географическое местоположение с удовлетворительной степенью точности.
В соответствии с одним вариантом осуществления этап вычисления параметра погрешности передачи приемной станции соответствует формуле:

где  - параметр погрешности приемной станции в проверяемом положении,
- параметр погрешности приемной станции в проверяемом положении,  - расстояние между проверяемым положением и приемной станцией,
- расстояние между проверяемым положением и приемной станцией,  - расстояние между проверяемым положением и опорной станцией, Ti - дата приема радиосигнала приемной станцией, T0 - дата приема радиосигнала опорной станцией, и C - скорость распространения радиосигнала, переданного устройством передачи сигнала.
- расстояние между проверяемым положением и опорной станцией, Ti - дата приема радиосигнала приемной станцией, T0 - дата приема радиосигнала опорной станцией, и C - скорость распространения радиосигнала, переданного устройством передачи сигнала.
В соответствии с одним вариантом осуществления степень суммарной погрешности подзоны представляет собой сумму параметров погрешности передачи множества приемных станций для упомянутой подзоны.
В соответствии с одним вариантом осуществления способ дополнительно содержит этапы, на которых определяют пороговое значение качества сигнала и не учитывают радиосигнал, принятый приемной станцией, качество приема радиосигнала которой ниже определенного порогового значения качества сигнала. Благодаря этим признакам надежность способа определения географического местоположения является удовлетворительной. В частности, таким образом можно отбросить станции, качество приема сигнала которых является слишком низким для обеспечения высокой надежности результатов.
В соответствии с одним вариантом осуществления способ дополнительно содержит этапы, на которых определяют пороговую дату приема и не учитывают радиосигнал, принятый станциями, имеющими дату приема сигнала, превышающую пороговую дату приема. Благодаря этим признакам надежность определения географического местоположения является удовлетворительной. В частности, таким образом можно отбросить станции, прием сигнала которых может соответствовать приему сигнала по множеству путей.
В соответствии с одним вариантом осуществления способ дополнительно содержит этапы, на которых определяют, что расстояние между двумя приемными станциями меньше пороговой разности, и выполняют этап определения зоны сканирования с использованием общего положения для упомянутых двух приемных станций, расстояние между которыми меньше пороговой разности.
В соответствии с одним вариантом осуществления на этапе определения зоны сканирования в зависимости от положений приемных станций, положение одной из упомянутых двух приемных станций, расстояние между которыми меньше пороговой разности, не учитывают.Другими словами, общее положение, используемое для двух приемных станций, расстояние между которыми меньше пороговой разности, представляет собой положение одной из упомянутых двух станций.
В соответствии с одним вариантом осуществления способ дополнительно содержит этапы, на которых определяют среднее положение между упомянутыми двумя приемными станциями, расстояние между которыми меньше пороговой разности, и выполняют этап определения зоны сканирования в зависимости от среднего положения, вычисленного вместо этого, и не учитывают положения упомянутыми двух станций, позволившие вычислить это среднее положение. Другими словами, этап определения зоны сканирования выполняют в зависимости от положений приемных станций, отличных от упомянутых двух приемных станций, и в зависимости от среднего положения между упомянутыми двумя приемными станциями, расстояние между которыми меньше пороговой разности.
В соответствии с одним вариантом осуществления радиосигнал, передаваемый устройством передачи сигнала, содержит полезную нагрузку и заголовок, причем упомянутый заголовок содержит идентификатор и дату передачи упомянутого сигнала, причем способ дополнительно содержит этап, на котором идентифицируют радиосигнал каждой приемной станцией с использованием идентификатора, содержащегося в заголовке сигнала.
В соответствии с одним вариантом осуществления множество приемных станций подключены к серверу, причем способ дополнительно содержит этап, на котором для каждой приемной станции передают на сервер сообщение, содержащее идентификатор радиосигнала, показатель качества приема радиосигнала приемной станцией, дату приема радиосигнала и идентификатор приемной станции.
В соответствии с одним вариантом осуществления изобретение также предлагает устройство для определения географического местоположения устройства передачи радиосигнала, при этом упомянутое устройство передачи сигнала передает радиосигнал, причем устройство для определения географического местоположения содержит:
a) модуль выбора для выбора опорной станции из множества приемных станций, принявших радиосигнал,
b) модуль определения зоны сканирования, выполненный с возможностью определения зоны сканирования в зависимости от положений упомянутых приемных станций,
c) модуль подразделения, выполненный с возможностью подразделения зоны сканирования на множество подзон в зависимости от шага сканирования,
d) модуль вычисления степени суммарной погрешности, выполненный с возможностью для каждой подзоны вычисления степени суммарной погрешности упомянутой подзоны, причем вычисление степени суммарной погрешности упомянутой подзоны содержит:
определение проверяемого положения, включенного в упомянутую подзону,
вычисление для каждой приемной станции соответствующего параметра погрешности передачи в зависимости от даты приема радиосигнала упомянутой приемной станцией, даты приема радиосигнала опорной станцией, скорости распространения радиосигнала, расстояния между проверяемым положением и упомянутой приемной станцией и расстояния между проверяемым положением и опорной станцией,
вычисление степени суммарной погрешности подзоны в зависимости от параметров погрешности передачи, вычисленных для всех приемных станций,
e) модуль выбора подзоны, выполненный с возможностью выбора подзоны, имеющей минимальную степень суммарной погрешности, в качестве подзоны местоположения устройства передачи сигнала,
в котором модуль определения зоны сканирования также выполнен с возможностью определения новой зоны сканирования, при этом новая зона сканирования включает в себя и центрирована в подзоне местоположения, выбранной модулем выбора подзоны, модуль подразделения также выполнен с возможностью определения нового шага сканирования меньшего, чем шаг сканирования, причем устройство для определения географического местоположения выполнено с возможностью итеративного определения географическое местоположения устройства передачи сигнала на основе зон сканирования и шага, итеративно определяемых модулем определения зоны сканирования и модулем подразделения.
В соответствии с одним вариантом осуществления изобретение также предлагает компьютерную программу, содержащую инструкции на носителе данных, выполненные с возможностью исполнения компьютером для осуществления описанного выше способа.
Краткое описание чертежей
Изобретение станет более понятно, и другие задачи, детали, признаки и преимущества станут более очевидными при изучении нижеследующего описания нескольких конкретных вариантов осуществления изобретения, приведенных исключительно в качестве примера и неограничивающим образом со ссылкой на приложенные чертежи.
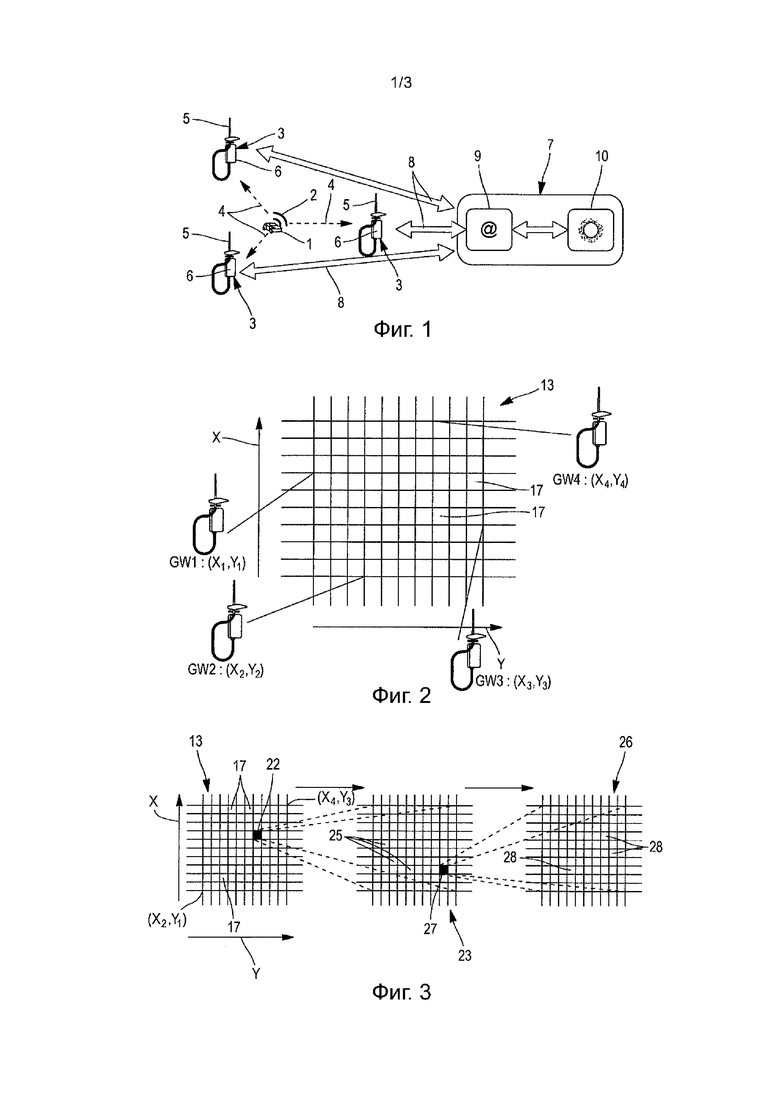
Фиг.1 представляет схематичное представление предмета, передающего радиосигнал, в глобальной сети связи, содержащей множество шлюзов, подключенных к серверу.
Фиг.2 представляет схематичное представление географической зоны сканирования, подразделенной на подзоны, в которой расположено множество приемных станций.
Фиг.3 представляет схематичное представление географических зон сканирования, выбранных при последовательных итерациях способа определения географического местоположения, показанного на фиг.4.
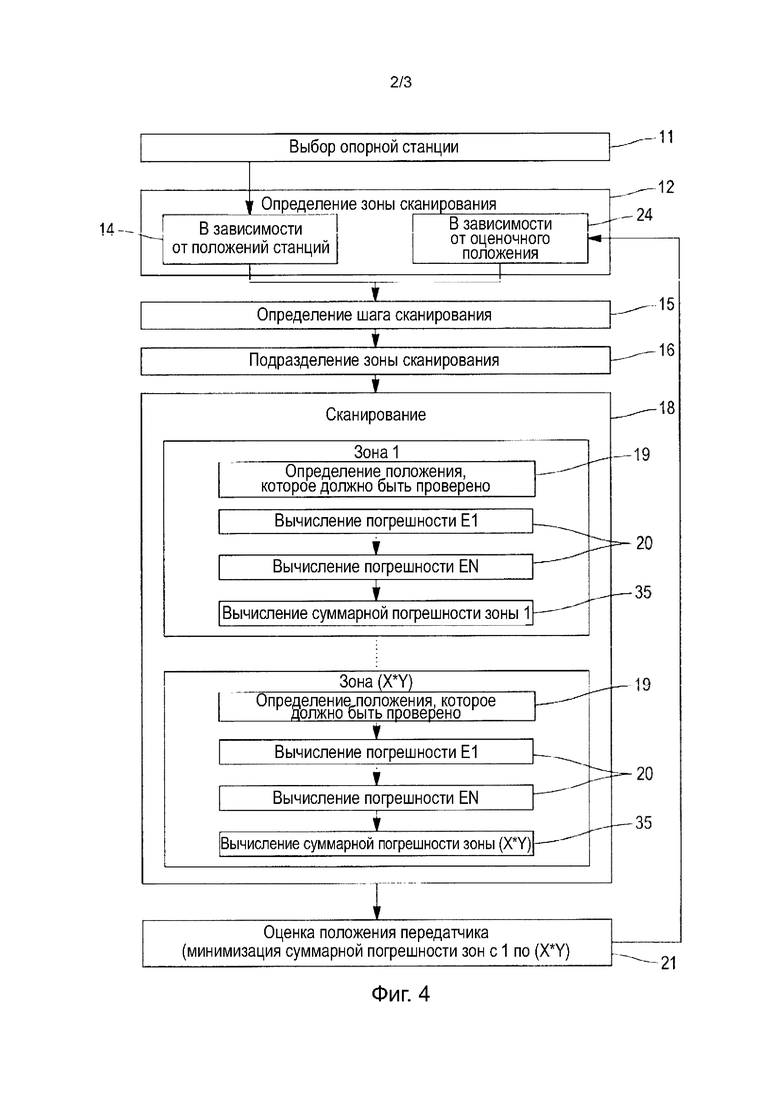
Фиг.4 представляет схему, иллюстрирующую последовательные этапы способа определения географического местоположения в соответствии с первым вариантом осуществления.
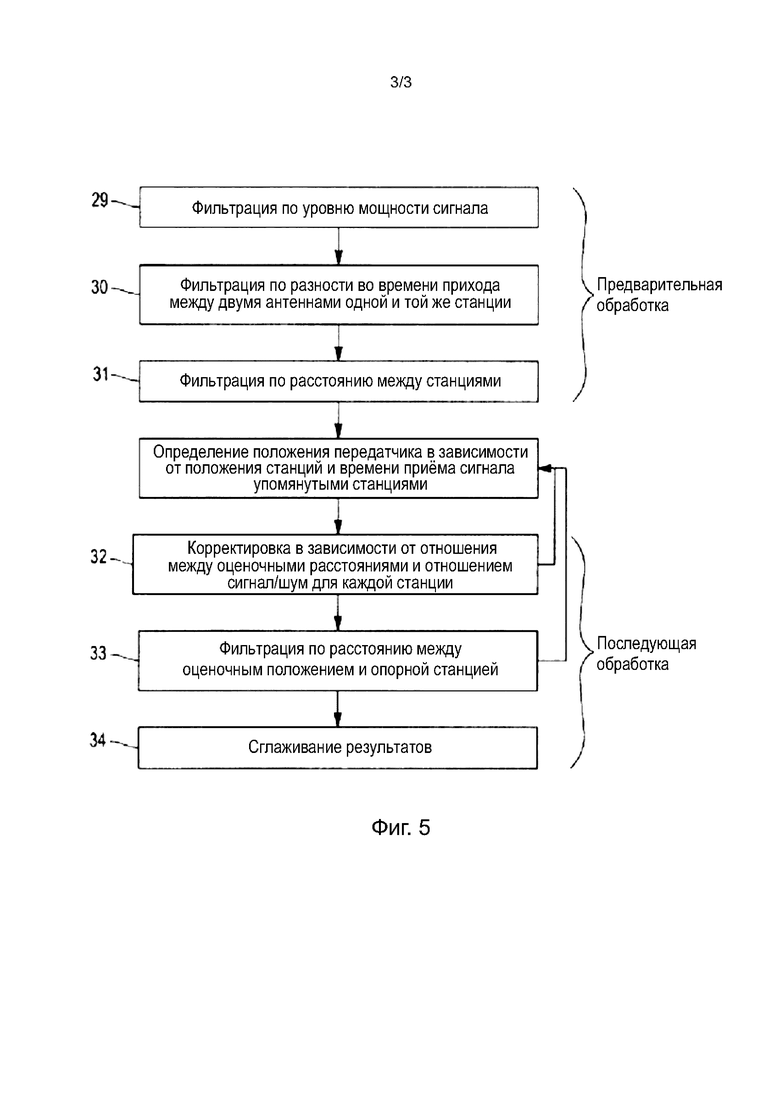
Фиг.5 представляет схему, иллюстрирующую последовательные этапы способа определения географического местоположения в соответствии со вторым вариантом осуществления.
Подробное описание вариантов ОСУЩЕСТВЛЕНИЯ
Фиг.1 иллюстрирует устройство 1 передачи радиосигнала, географическое местоположение которого должно быть определено. Такое устройство 1 может представлять собой устройство любого типа, выполненное с возможностью обмена данными посредством радиосигнала 2, например, устройство 1, относящееся к Интернету вещей. Устройство 1 может представлять собой, например, беспроводной датчик, такой как, счетчик воды, газа или другой измерительный прибор. Такое устройство оснащено модулем беспроводной связи и, следовательно, может передавать данные, измеренные или вычисленные в зависимости от его характеристик, например, показания расхода воды, газа или другие показания измерительного прибора. Устройство 1, относящееся к Интернету вещей, имеет характерную особенность, заключающуюся в том, что оно потребляет мало энергии, его обычно определяют как «устройство с низким энергопотреблением», и использует средство связи с очень низкой скоростью передачи данных, например, менее 2 кбит/с.
Радиосигнал 2, передаваемый устройством 1, содержит заголовок и полезную нагрузку. Заголовок содержит техническую информацию, позволяющую обрабатывать радиосигнал 2. Эта техническая информация представляет собой, например, информацию об устройстве 1, передавшем радиосигнал 2, о получателе радиосигнала 2 или даже идентификатор радиосигнала 2. Полезная нагрузка радиосигнала 2, в свою очередь, содержит данные, передаваемые устройством 1 и предназначенные для обработки получателем радиосигнала 2, например, данные, считанные датчиком, информацию отслеживания состояния устройства 1 или другую информацию, запрошенную получателем радиосигнала 2.
Когда радиосигнал 2 передается устройством 1, этот радиосигнал 2 принимается множеством станций 3 или шлюзов концентрации сообщений, расположенных рядом с устройством 1, как проиллюстрировано стрелками 4 на фиг.1.
На фиг.1 проиллюстрированы три станции 3. Каждая станция 3 содержит по меньшей мере одну антенну 5. Эта антенна 5 позволяет принимать радиосигналы 2, передаваемые в пределах заданного радиуса вокруг упомянутой станции 3. Станция 3 также содержит блок 6 управления, позволяющий обрабатывать принятый радиосигнал 2. Обработка радиосигнала 2 блоком 6 управления состоит, по меньшей мере, в передаче информации, содержащейся в радиосигнале 2, на удаленный сервер 7. Для этого блок 6 управления содержит интерфейс связи, подключенный к сети, например, глобальной сети связи Интернет или сети другого типа.
Блок 6 управления по сети связи отправляет сообщение 8 на удаленный сервер 7. Это сообщение 8 содержит информацию, содержащуюся в принятом радиосигнале 2, с которой связана дополнительная информация. Дополнительная информация представляет собой, например, качество приема принятого радиосигнала 2, дату прихода радиосигнала 2 на станцию 3 или даже идентификатор станции 3. Таким образом, в примере, проиллюстрированном на фиг.1, радиосигнал 2, переданный устройством 1, принимается тремя станциями 3, и каждая станция 3 отправляет на удаленный сервер 7 соответствующее сообщение 8, содержащее содержание радиосигнала 2, связанное с индикаторами качества приема радиосигнала 2, идентификатором станции 3 и датой приема радиосигнала 2 упомянутой станцией 3. Качество сигнала, принятого станцией 3, например, выражено аббревиатурой RSSI («показатель уровня принимаемого сигнала») и/или отношением сигнал/шум, далее обозначаемым аббревиатурой SNR, радиосигнала 2.
Удаленный сервер 7 содержит агрегатор 9 потоков и приложение 10 для определения географического местоположения (например, типа LBS, где LBS расшифровывается как «Location-Based Service»). Агрегатор 9 потоков позволяет принимать все сообщения 8, передаваемые станциями 3. Агрегатор 9 потоков выполнен с возможностью декодирования заголовка радиосигнала 2 для извлечения из него идентификационного номера радиосигнала 2. Для каждого сообщения 8, принятого агрегатором 9 потоков, агрегатор 9 потоков передает в приложение 10 для определения географического местоположения идентификатор радиосигнала 2, дату приема радиосигнала 2 станцией 3, идентификатор станции 3 и показатель качества приема радиосигнала 2 станцией 3. На основании этих данных приложение 10 для определения географического местоположения определяет географическое местоположение устройства 1, передавшего радиосигнал 2, как объяснено ниже в отношении фигур 2-5.
Когда приложение 10 для определения географического местоположения принимает для одного и того же радиосигнала 2 множество данных от, по меньшей мере, трех различных станций 3, принявших упомянутый радиосигнал 2, приложение 10 для определения географического местоположения может определять географическое местоположение путем триангуляции устройства 1, передавшего упомянутый радиосигнал 2. Идентификация приема одного и того же радиосигнала 2 различными станциями 3 выполняется с использованием идентификатора радиосигнала 2, декодированного из заголовка упомянутого радиосигнала 2, другими словами, когда по меньшей мере три сообщения 8 содержат один и тот же идентификатор радиосигнала 2, приложение 10 для определения географического местоположения может выполнять определение географического местоположения устройства 1 с использованием способа определения географического местоположения, проиллюстрированного на фиг.4.
На первом этапе 11 способа определения географического местоположения, проиллюстрированного на фиг.4, приложение 10 для определения географического местоположения выбирает опорную станцию из станций 3, принявших радиосигнал 2. Опорная станция определяется произвольно. Таким образом, в одном варианте осуществления опорная станция представляет собой станцию 3, имеющую наименьшую дату приема радиосигнала 2, то есть станцию 3 принявшую радиосигнал 2 раньше всех.
На втором этапе 12 приложение 10 для определения географического местоположения определяет зону 13 сканирования для определения географического местоположения устройства 1.
На первой итерации способа определения географического местоположения этап 12 определения зоны 13 сканирования содержит этап 14 определения зоны 13 сканирования в зависимости от координат станций 3, принявших радиосигнал 2. Фиг.2 иллюстрирует пример варианта осуществления этапа 14 определения зоны 13 сканирования на первой итерации способа определения географического местоположения и в контексте радиосигнала 2, принятого четырьмя разными станциями 3, обозначенными ссылочными позициями GWi, где i варьируется в диапазоне от 1 до 4, на фиг.2. Каждая станция GWi имеет известное местоположение и координаты (Xi, Yi), соответствующие ее широте и долготе соответственно. Для определения зоны 13 сканирования на этом этапе 14 первой итерации способа определения географического местоположения приложение 10 для определения географического местоположения определяет максимальные и минимальные значения широты станций GWi и максимальные и минимальные значения долготы упомянутых станций GWi, принявших радиосигнал 2. Таким образом, в примере, проиллюстрированном на фиг.2, приложение 10 для определения географического местоположения определяет, что минимальное значение широты станций представляет собой значение X2 широты станции GW2, а максимальное значение широты представляет собой значение X4 широты станции GW4. Подобным образом минимальное значение долготы представляет собой значение Y1 долготы станции GW1, а максимальное значение долготы представляет собой значение Y3 долготы станции GW3. Зона 13 сканирования, определенная на этапе 14, ограничена надлежащим образом определенными максимальными и минимальными координатами. Таким образом, зона 13 сканирования, определенная на этапе 14 в примере, проиллюстрированном на фиг.2, определена как зона, находящаяся между значениями X2 и X4 широты и между значениями Y1 и Y3 долготы. Зона 13 сканирования, определенная таким образом, представляет географическую зону, содержащую каждую из станций GWi, принявших радиосигнал 2. Зона 13 сканирования, определенная с использованием координат станций GWi, может быть увеличена за счет допуска, окружающего упомянутую зону 13 сканирования, такой допуск позволяет обеспечить более высокую надежность определения географического местоположения.
Когда зона 13 сканирования определена, приложение 10 для определения географического местоположения на этапе 15 определяет шаг сканирования. На первой итерации способа определения географического местоположения шаг сканирования определяется произвольно, например, со значением 1° широты/долготы. Затем на этапе 16 способа определения географического местоположения зону 13 сканирования подразделяют на квадратные подзоны 17 на основе шага сканирования, то есть на квадратные подзоны 17 со сторонами 1° между координатами (X1, Y2) и (X4, Y3) в примере, проиллюстрированном на фиг.2.
На этапе 18 сканирования приложение 10 для определения географического местоположения сканирует зону 13 сканирования для определения подзоны 17, содержащей устройство 1, передающее радиосигнал 2. Для этого на этапе 19 для каждой подзоны 17 приложение 10 для определения географического местоположения определяет положение, которое должно быть проверено, для соответствующей подзоны. Положение, которое должно быть проверено, имеет координаты (k, l), содержащиеся в упомянутой подзоне 17. Положение, которое должно быть проверено, например, отцентрировано в подзоне 17. Правило определения положения, которое должно быть проверено, для каждой подзоны 17 применяется одинаковым образом для всех подзон 17 зоны 13 сканирования.
Для каждой подзоны 17 приложение 10 для определения географического местоположения вычисляет параметр суммарной погрешности, связанный с упомянутой подзоной 17. Для этого на этапе 20 приложение 10 для определения географического местоположения вычисляет для каждой станции 3 параметр погрешности. Для этого для каждой станции приложение 10 для определения географического местоположения применяет следующую формулу:
где
- параметр погрешности станции i для проверяемого положения координат k, l;
- расстояние между станцией i и проверяемым положением координат k, l. Это расстояние вычисляют с использованием информации о местоположении станции i, переданной станцией i в сообщении 8 на сервер 7;
- расстояние между опорной станцией и проверяемым положением координат k, l. Это расстояние вычисляют с использованием информации о местоположении опорной станции, переданной в сообщении 8, переданном упомянутой опорной станцией на сервер 7;
Ti - дата приема радиосигнала 2 станцией i;
T 0 -дата приема радиосигнала 2 опорной станцией;
C - скорость распространения радиосигнала 2.
Вычисление 20 параметра погрешности выполняют для проверяемого положения (k, l) каждой подзоны 17 для всех станций 3, принявших радиосигнал 2.
Когда все параметры погрешности подзоны 17 вычислены для всех станций i, принявших радиосигнал 2, упомянутую подзону 17, содержащую проверяемое положение, связывают с параметром суммарной погрешности, соответствующим сумме параметров погрешности, вычисленных для этой подзоны 17. Другими словами, на этапе 35 приложение 10 для определения географического местоположения вычисляет для каждой подзоны 17 параметр суммарной погрешности в соответствии со следующей формулой:

где i - проверяемая станция, N - количество станций, принявших радиосигнал 2, и - параметр погрешности, вычисленный станцией i для координат (k, l), соответствующих положению, которое должно быть проверено в соответствующей подзоне 17.
Когда все параметры суммарных погрешностей вычислены для всех подзон 17, на этапе 21 приложение 10 для определения географического местоположения выбирает подзону 17, имеющую наименьший параметр суммарной погрешности. Выбранная подзона представляет собой подзону 17, в которой находится устройство 1, передающее радиосигнал 2.
Однако определение местоположения выполняется со степенью точности, соответствующей шагу сканирования, определенному на этапе 15. Следовательно, предпочтительно выполнять новые итерации способа определения географического местоположения, с одной стороны, путем уменьшения зоны 13 сканирования, но также путем уменьшения шага сканирования, как проиллюстрировано на фиг.3. Таким образом, для каждой итерации необходимо переопределить зону сканирования, шаг сканирования для подразделения переопределенной зоны сканирования, вычислить суммарную погрешность для всех подзон новой зоны сканирования и выбрать в качестве подзоны подзону, имеющую наименьший параметр суммарной погрешности.
На фиг.3 зона 13 сканирования слева на фиг.3 иллюстрирует зону 13 сканирования, соответствующую зоне 13 сканирования, проиллюстрированной на фиг.2 и определенной на первой итерации способа определения географического местоположения, показанного на фиг.4. На первой итерации наименьший параметр суммарной погрешности был определен в подзоне, обозначенной ссылочной позицией 22 на фиг.3, причем подзона 22 имеет координаты в диапазоне от (X2+6, Y1+6)° до (X2+7, Y1+7)°. Для повышения точности определения географического местоположения устройства 1 требуется, по меньшей мере, одна вторая итерация способа определения географического местоположения. Первый этап второй итерации для определения новой зоны 23 сканирования на этапе 24 способа проиллюстрирован на фиг.4. Новую зону 23 сканирования определяют как подзону 22, выбранную на первой итерации на этапе 21. Таким образом, в примере, проиллюстрированном на фиг.3, новая зона 23 сканирования находится между значениями X2+6° и X2+7° широты и значениями Y1+6° и Y1+7° долготы.
Когда приложение 10 для определения географического местоположения определило новую зону 23 сканирования, приложение 10 для определения географического местоположения повторяет этап 15 для определения нового шага сканирования новой зоны 23 сканирования. Новый шаг сканирования представляет собой, например, долю от шага сканирования, определенного на этапе 15 предыдущей итерации, то есть первой итерации. В примере, проиллюстрированном на фигурах 2 и 3, шаг сканирования, определенный для зоны 13 сканирования на первой итерации, составлял 1°. На второй итерации шаг сканирования определяют как долю от шага сканирования первой итерации, например, шаг сканирования составляет 0,1°.
Приложение 10 для определения географического местоположения повторяет этап 16 подразделения путем применения его в отношении новой зоны 23 сканирования. Таким образом, новую зону 23 сканирования подразделяют на множество квадратных подзон 25 со сторонами 0,1°. Приложение 10 для определения географического местоположения выполняет этап 18 сканирования на всех подзонах 25 для вычисления параметра суммарной погрешности для каждой из этих подзон 25. Таким образом, для каждой подзоны 25 приложение для определения географического местоположения определяет новое положение, которое должно быть проверено, параметр погрешности в проверяемом положении вычисляют для каждой станции 3, и параметр суммарной погрешности связывают с каждой подзоной 25. Затем приложение 10 для определения географического местоположения выбирает подзону 25, имеющую наименьший параметр суммарной погрешности, в качестве подзоны 25, в которой находится устройство 1.
Приложение 10 для определения географического местоположения может выполнять множество итераций для повышения точности определения географического местоположения. Таким образом, аналогично второй итерации, третья итерация определяет новую зону 26 сканирования как подзону 25, выбранную на этапе 21 предыдущей итерации, то есть на второй итерации. Таким образом, на фиг.3 вторая итерация завершается выбором подзоны 27 из подзон 25, имеющих наименьший параметр суммарной погрешности. Подзона 27 представляет собой зону, находящуюся между значениями X2+6,2° и X2+6,3° широты и значениями Y1+6,8° и Y1+6,9° долготы. Новую зону 26 сканирования определяют на третьей итерации как надлежащим образом выбранную подзону 27. На третьей итерации на этапе 15 определяют новый шаг сканирования как долю от шага сканирования второй итерации, например, шаг сканирования составляет 0,01°. Затем приложение подразделяет новую зону 26 сканирования в соответствии с новым шагом сканирования и далее определяет параметры суммарных погрешностей подзон 28 новой зоны 26 сканирования, прежде чем выбрать упомянутую подзону 28, имеющую наименьший параметр суммарной погрешности.
Приложение 10 для определения географического местоположения итеративно выполняет вычисление параметров суммарных погрешностей для подзон последовательно уменьшающихся зон сканирования при уменьшении шага сканирования на каждой новой итерации. Предпочтительно приложение 10 для определения географического местоположения выполняет, по меньшей мере, три итерации вычисления суммарной погрешности и предпочтительно выполняет семь последовательных итераций вычисления суммарной погрешности. На последней итерации выбранная подзона представляет подзону, в которой находится устройство 1, передающее радиосигнал 2.
Для исключения каких-либо погрешностей при определении географического местоположения устройства 1 предпочтительно при последовательных определениях зон сканирования на этапе 24 добавлять допуск к подзоне, выбранной на этапе 21 предыдущей итерации. Фактически наличие препятствий между устройством 1, передающим радиосигнал 2, и станциями 3, принимающими упомянутый радиосигнал 2, может увеличивать дату приема радиосигнала 2 упомянутыми станциями 3 и, следовательно, изменять параметр погрешности, связанный с упомянутой станцией 3 на этапе 20. Вследствие этого минимальный параметр суммарной погрешности зоны сканирования может быть ошибочным, так что выбранная подзона может быть подзоной, которая не включает устройство 1.
Следовательно, предпочтительно определять новую зону сканирования на этапе 24 как включающую в себя подзону, выбранную на предыдущей итерации на этапе 21, и добавлять к ней допуск на погрешность. Такой допуск продолжается на заданную толщину со всех сторон подзоны, выбранной на этапе 21 предыдущей итерации. Толщину, например, определяют в зависимости от шага, используемого при сканировании на предыдущей итерации. В примерном варианте осуществления допуск на погрешность имеет толщину вокруг выбранной подзоны, равную шагу сканирования предыдущей итерации, умноженному на положительное целое число, например, 5.
В примере, описанном выше в отношении фиг.3, определение новой зоны 23 сканирования на этапе 24 второй итерации выполняют путем добавления к первой выбранной подзоне 22 допуска, равного пятикратному шагу в 1°, определенному на первой итерации. Таким образом, новая зона 23 сканирования находится между значениями X2+(6-5*1)° и X2+(7+5*1)° широты и значениями Y1+(6-5)° и Y1+(7+5)° долготы, другими словами, находится между значениями X2+1° и X2+12° широты и значениями Y1+1° и Y1+12° долготы, с шагом сканирования 0,1°. Подобным образом зона 26 сканирования, определенная на этапе 24 третьей итерации, включает в себя подзону 27, выбранную на этапе 21 второй итерации, к которой добавили допуск, равный пятикратному шагу сканирования в 0,1°, определенному на второй итерации. Следовательно, зона 26 сканирования, определенная на третьей итерации, находится между значениями X2+(6,2-0,1*5)° и X2+(6,3+0,1*5)° широты и значениями Y1+(6,8-0,1*5)° и Y1+(6,9+0,1*5)° долготы, т.е. между значениями X2+5,7° и X2+6,8° широты и значениями Y1+6,3° и Y1+7,4° долготы, с шагом сканирования 0,01°.
Другие функциональные возможности сервера 7 также позволяют повысить качество определения географического местоположения устройства 1. Таким образом, как проиллюстрировано на фиг.5, приложение 10 для определения географического местоположения может содержать предварительную обработку и последующую обработку для способа определения географического местоположения, описанного выше в отношении фиг.4.
Первая предварительная обработка, проиллюстрированная этапом 29 на фиг.5, может состоять в отбрасывании станций 3, принявших радиосигнал 2 со слишком низким качеством сигнала для использования с удовлетворительной степенью надежности. Таким образом, когда сообщение 8, переданное на сервер 7 станцией 3, имеет качество сигнала, связанное с данными, соответствующими упомянутому радиосигналу 2, ниже порогового значения, эта станция 3 не учитывается приложением 10 для определения географического местоположения. Такое пороговое значение определяется произвольно. В одном примере в случае качества сигнала, выраженного с использованием RSSI, пороговое значение составляет порядка -130 дБ. Таким образом, сообщение 8 от станции 3, принявшей радиосигнал 2, с RSSI ниже -130 дБ не учитывается приложением 10 для определения географического местоположения для определения географического местоположения устройства 1.
Вторая предварительная обработка, проиллюстрированная этапом 30 на фиг.5, состоит в отбрасывании станций 3, имеющих множество приемных антенн 5, принявших радиосигнал 2, для которых разность в дате приема радиосигнала 2 на разных антеннах 5 упомянутой станции 3 превышает пороговую разность, например, пороговую разность порядка 1500 нс.Таким образом, сообщение 8, соответствующее наибольшей дате приема, то есть сообщение, соответствующее самому длинному пути и, следовательно, принятое последним, отбрасывается приложением 10 для определения географического местоположения для определения географического местоположения устройства 1.
Во время третьей предварительной обработки, проиллюстрированной этапом 31 на фиг.5, выполняется фильтрация в соответствии с расстояниями между разными станциями 3, принявшими радиосигнал 2. Задача этой фильтрации заключается в том, чтобы гарантировать, что станции 3, принявшие сообщение 8, находятся достаточно далеко друг от друга для обеспечения хорошей возможности определения географического местоположения. Обычно, если две станции 3 находятся на расстоянии десяти метров друг от друга или около того, этап 14 определения зоны 13 сканирования в соответствии с координатами станций 3, принявших сообщение на первой итерации способа определения географического местоположения, уточняется. Для этого упомянутый этап 14 определения зоны 13 сканирования содержит этап (не проиллюстрирован) сравнения расстояний между станциями 3 с пороговым расстоянием, например, 500 метров.
В соответствии с первым вариантом, когда расстояние между двумя станциями 3, принявшими сообщение, меньше порогового расстояния, для определения зоны 13 сканирования на этапе 14 на первой итерации способа определения географического местоположения учитывается географическое положение только одной из двух упомянутых станций 3. Станция 3, которая не учитывается на этапе 14 определения зоны 13 сканирования, выбирается произвольно, например, как та, которая приняла сообщение последней. Однако эта станция 3 отбрасывается только для этапа 14 определения зоны 13 сканирования, этапы сканирования 18 и вычисления 35 суммарной погрешности, в свою очередь, по-прежнему следует выполнять путем включения этапов 20 вычисления погрешности упомянутых двух станций 3, включая станция 3, отброшенную для этапа 14 определения зоны 13 сканирования.
Во втором варианте, когда расстояние между двумя станциями 3, принявшими сообщение, меньше порогового расстояния, вычисляется среднее положение между двумя упомянутыми станциями 3. Таким образом, этап 14 определения зоны 13 сканирования в зависимости от координат станций 3, принявших сообщение 8, выполняется без учета двух упомянутых станций 3, но с учетом среднего положения между двумя станциями 3 вместо двух упомянутых станций 3. И в этом случае этапы сканирования 18 и вычисления 35 суммарной погрешности выполняются с учетом двух упомянутых станций 3.
Во время первой последующей обработки, проиллюстрированной на этапе 32 на фиг.5, приложение 10 для определения географического местоположения корректирует оценочные расстояния между станциями 3, принявшими радиосигнал 2, и оценочное положение устройства 1. Для этого приложение вычисляет для каждой станции 3 отношение SNR/расстояние между SNR (отношение сигнал/шум) радиосигнала 2, принятого станцией 3, и расстоянием, вычисленным между оценочным положением устройства 1 приложением 10 для определения географического местоположения, и положением упомянутой станции 3. Затем приложение 10 для определения географического местоположения вычисляет среднее значение отношений SNR/расстояние. Первая последующая обработка 32 основана на принципе, что препятствия одинаково распределены в зоне передачи радиосигнала 2, и что отношение SNR/расстояние должно быть одинаковым для всех станций 3, принявших сигнал.
Когда отношение SNR/расстояние, связанное с сообщением 8, превышает среднее значение отношений SNR/расстояние, приложение 10 для определения географического местоположения увеличивает дату приема радиосигнала 2 станцией 3, соответствующей упомянутому сообщению 8. Когда отношение SNR/расстояние, связанное с сообщением 8, меньше среднего значения отношений SNR/расстояние, приложение 10 для определения географического местоположения уменьшает дату приема радиосигнала 2 станцией 3, соответствующей упомянутому сообщению 8. Увеличение или уменьшение выполняется, например, с шагом 10 нс.Кроме того, изменение даты приема сигнала может быть пропорционально разности между вычисленным отношением SNR/расстояние и средним значением отношений SNR/расстояние. Таким образом, чем больше разность между средним значением отношений SNR/расстояние и отношением SNR/расстояние сообщения 8, тем больше корректировка даты приема станцией 3, передавшей упомянутое сообщение 8. Затем приложение 10 для определения географического местоположения снова выполняет определение географического местоположения устройства 1 (определение опорной станции и последующие итерации определения зоны сканирования, шага сканирования, вычисления параметра суммарной погрешности и выбора подзоны), с использованием данных об измененных датах приема радиосигнала 2.
Второй этап 33 последующей обработки состоит в отбрасывании результата приложения 10 для определения географического местоположения, который находится слишком близко или слишком далеко от опорной станции, который может соответствовать неправильному определению географического местоположения устройства 1. Другими словами, после завершения определения географического местоположения устройства 1 расстояние между оценочным положением устройства 1 и опорной станцией сравнивают с предельными максимальным и минимальным значениями. Эти предельные значения определяют либо абсолютным образом, либо относительным образом в отношении используемых расстояний между разными станциями 3. Любую оценку, находящуюся слишком далеко от опорной станции, отклоняют как неправильную. Подобным образом любую оценку, находящуюся слишком близко к опорной станции, например, на расстоянии меньше нескольких десятков метров, также отклоняют.Затем приложение для определения географического местоположения выполняет новую оценку географического местоположения устройства 1, как объяснено выше в отношении фиг.4, путем отбрасывания из обработки ранее выбранной опорной станции.
Третья последующая обработка 34 может состоять в сглаживании результатов, выданных приложением 10 для определения географического местоположения, во времени и ослаблении различий, присущих неопределенностям измерений. Таким образом, усредняют последовательные оценки положения одного и того же устройства 1, полученные с использованием разных радиосигналов 2, обработанных приложением 10 для определения географического местоположения. Число оценок, используемых при каждом усреднении, зависит от типа устройства 1, чем подвижнее устройство 1, тем меньше это число.
Таким образом, способ определения географического местоположения в соответствии с изобретением позволяет определять географическое местоположение устройства, передающего сигнал, с использованием сигнала, генерируемого упомянутым устройством, без необходимости анализа полезной нагрузки этого сигнала. Таким образом, когда устройство передает сигнал, например, показания измерительного прибора или т.п., для использования удаленным сервером, способ определения географического местоположения в соответствии с изобретением позволяет определять географическое местоположение устройства с использованием этой передачи сигнала без необходимости анализа содержания полезной нагрузки сигнала. Таким образом, способ в соответствии с изобретением позволяет определять географическое местоположение устройства без необходимости передачи специального сигнала устройством, а с использованием обычных рабочих сигналов устройства. Таким образом, способ определения географического местоположения позволяет определять географическое местоположение устройства без увеличения энергопотребления или дополнительного усложнения по сравнению с нормальной работой.
Хотя изобретение описано со ссылкой на несколько конкретных вариантов осуществления, очевидно, что оно никоим образом не ограничивается ими, и что оно включает в себя все технические эквиваленты описанных средств и их сочетания, если последние находятся в пределах объема изобретения.
Некоторые из представленных элементов, в частности, компоненты шлюза, могут быть изготовлены в различных формах единым или распределенным образом посредством аппаратных и/или программных компонентов. Аппаратные компоненты, которые могут быть использованы, представляют собой интегральные схемы специального назначения ASIC, программируемые логические массивы FPGA или микропроцессоры. Программные компоненты могут быть написаны на разных языках программирования, например, C, C++, Java или VHDL. Этот список не является исчерпывающим.
Использование глаголов «содержать», «иметь» или «включать в себя» и производных форм не исключает наличия элементов или этапов, отличных от перечисленных в пункте формулы изобретения.
В формуле изобретения любая ссылочная позиция в скобках не должна интерпретироваться как наложение ограничения на пункт формулы изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ ГЕОГРАФИЧЕСКОГО МЕСТОПОЛОЖЕНИЯ УСТРОЙСТВА ПЕРЕДАЧИ СИГНАЛА | 2019 |
|
RU2779414C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ АБОНЕНТСКОГО ТЕРМИНАЛА С ПОМОЩЬЮ СПУТНИКА-РЕТРАНСЛЯТОРА НА НИЗКОЙ ОКОЛОЗЕМНОЙ ОРБИТЕ | 2017 |
|
RU2679890C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ АБОНЕНТСКОГО ТЕРМИНАЛА С ПОМОЩЬЮ НЕ МЕНЕЕ ДВУХ СПУТНИКОВ-РЕТРАНСЛЯТОРОВ НА НИЗКОЙ ОКОЛОЗЕМНОЙ ОРБИТЕ | 2017 |
|
RU2684740C1 |
| СИСТЕМА ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ СОТОВОГО ТЕЛЕФОНА | 1994 |
|
RU2107925C1 |
| ОПРЕДЕЛЕНИЕ РАДИУСА ПОГРЕШНОСТИ МЕСТОПОЛОЖЕНИЯ | 2015 |
|
RU2680093C2 |
| ОПРЕДЕЛЕНИЕ МЕСТОПОЛОЖЕНИЯ МОБИЛЬНОЙ СТАНЦИИ | 2009 |
|
RU2521496C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ МЕСТОПОЛОЖЕНИЯ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЯ | 2009 |
|
RU2430385C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ОРБИТЫ ИСКУССТВЕННОГО СПУТНИКА ЗЕМЛИ С ИСПОЛЬЗОВАНИЕМ ПРИЕМНЫХ ОПОРНЫХ РЕПЕРНЫХ СТАНЦИЙ | 2018 |
|
RU2702098C1 |
| Способ определения географических координат источников радиоизлучения в многоцелевой обстановке | 2021 |
|
RU2773307C1 |
| ЭНЕРГОЭФФЕКТИВНОЕ СКАНИРОВАНИЕ И ЗАХВАТ МАЛОЙ БАЗОВОЙ СТАНЦИИ | 2009 |
|
RU2478257C2 |
Изобретение относится к области способов определения географического местоположения устройства передачи радиосигнала, в частности устройств передачи сигнала, относящихся к области Интернета вещей. Техническим результатом заявленного изобретения является создание упрощенного способа определения географического местоположения устройства передачи радиосигнала, который обеспечивает уменьшенное энергопотребление и высокую надежность. Заявленный способ содержит этапы, на которых предоставляют положение множества станций и даты приема радиосигнала упомянутыми станциями, выбирают опорную станцию, определяют зону сканирования, подразделяют зону сканирования в зависимости от шага сканирования. Для каждой подзоны вычисляют степень суммарной погрешности упомянутой подзоны. Выбирают подзону, имеющую минимальную степень суммарной погрешности. Затем определяют новую зону сканирования, новый шаг сканирования и повторяют вышеуказанные этапы способа. 3 н. и 9 з.п. ф-лы, 5 ил.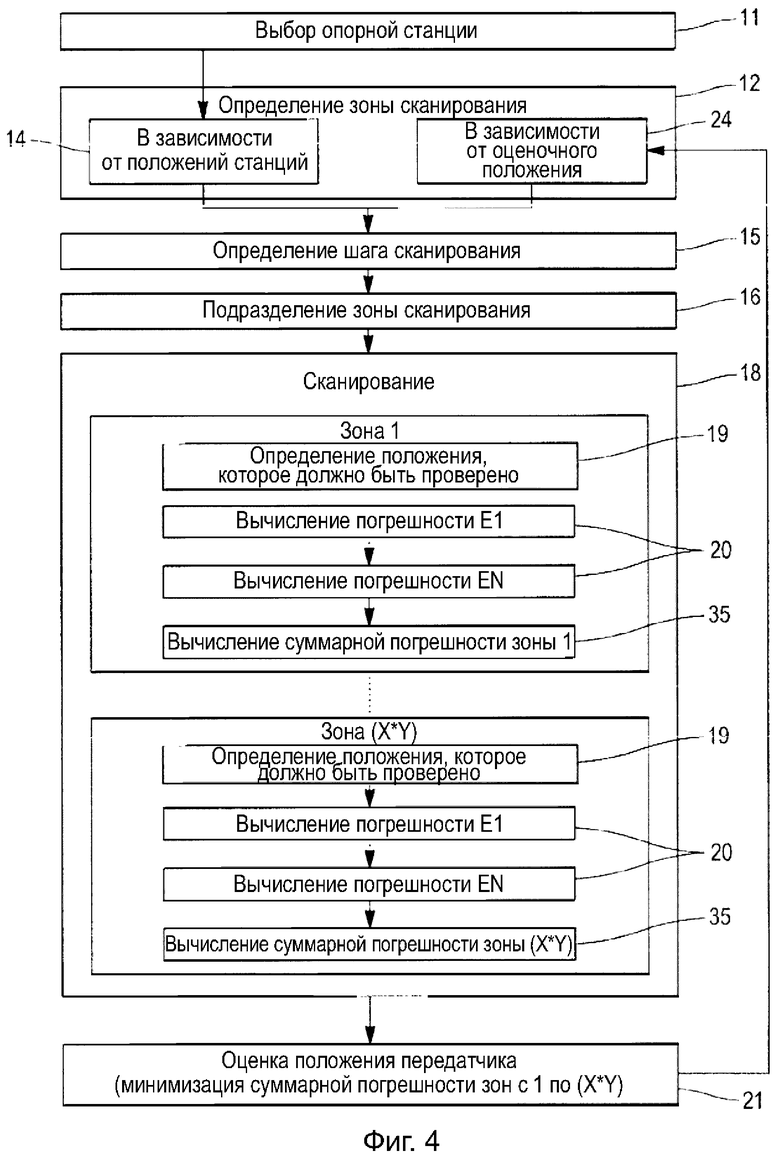
1. Способ определения географического местоположения устройства передачи сигнала, передающего радиосигнал (2), при этом упомянутый способ включает в себя этапы, на которых:
a) предоставляют положения множества приемных станций (3, GWi) сети радиосвязи и даты ( ) приема радиосигнала (2) упомянутыми приемными станциями (3, GWi),
) приема радиосигнала (2) упомянутыми приемными станциями (3, GWi),
b) выбирают опорную станцию (3, GWi) из множества приемных станций (3, GWi),
c) определяют (14) зону (13) сканирования в зависимости от положений (Xi, Yi) упомянутых приемных станций (3, GWi),
d) подразделяют зону (13) сканирования на множество подзон (17) в зависимости от шага сканирования,
e) для каждой подзоны (17, 25, 28) вычисляют степень суммарной погрешности упомянутой подзоны (17, 25, 28), причем вычисление степени суммарной погрешности упомянутой подзоны (17, 25, 28) содержит этапы, на которых:
определяют (19) проверяемое положение (k, l), включенное в упомянутую подзону (17, 25, 28),
вычисляют для каждой приемной станции (3, GWi) соответствующий параметр ( ) погрешности передачи в зависимости от даты (Ti) приема радиосигнала (2) упомянутой приемной станцией (3, GWi), даты (T0) приема радиосигнала (2) опорной станцией, скорости (C) распространения радиосигнала (2), расстояния (
) погрешности передачи в зависимости от даты (Ti) приема радиосигнала (2) упомянутой приемной станцией (3, GWi), даты (T0) приема радиосигнала (2) опорной станцией, скорости (C) распространения радиосигнала (2), расстояния ( ) между проверяемым положением (k, l) и упомянутой приемной станцией (3, GWi) и расстояния (
) между проверяемым положением (k, l) и упомянутой приемной станцией (3, GWi) и расстояния ( ) между проверяемым положением (k, l) и опорной станцией,
) между проверяемым положением (k, l) и опорной станцией,
вычисляют степень суммарной погрешности подзоны (17, 25, 28) в зависимости от параметров () погрешности передачи, вычисленных для всех приемных станций (3, GWi),
f) выбирают (21) подзону (22, 27), имеющую минимальную степень суммарной погрешности, в качестве подзоны (22, 27) местоположения устройства (1) передачи сигнала,
g) определяют (24) новую зону (23, 26) сканирования, причем новая зона (23, 26) сканирования включает в себя и отцентрирована в подзоне (22, 27) местоположения, выбранной на этапе f),
h) определяют (15) новый шаг сканирования меньший, чем шаг сканирования,
i) повторяют способ с этапа d) с новой зоной (23, 26) сканирования в качестве зоны (23, 26) сканирования и новым шагом в качестве шага,
в котором на каждой итерации новую зону (23, 26) сканирования определяют на этапе h) как равную подзоне (22, 27) местоположения, выбранной на этапе f), дополненной допуском, полностью окружающим подзону (22, 27) местоположения, ширина которого больше, чем шаг сканирования.
2. Способ по п. 1, в котором определение (14) зоны сканирования содержит этап, на котором определяют максимальное значение долготы приемных станций (3, GWi), минимальное значение долготы приемных станций (3, GWi), максимальное значение широты приемных станций (3, GWi), минимальное значение широты приемных станций (3, GWi), причем зона (13) сканирования ограничена упомянутыми максимальными и минимальными значениями долготы и широты.
3. Способ по одному из пп. 1 и 2, содержащий количество итераций больше 3, например 7.
4. Способ по одному из пп. 1-3, в котором этап (35) вычисления параметра погрешности передачи приемной станции соответствует формуле

где  - параметр погрешности станции (3, GWi) в проверяемом положения координат (k, l),
- параметр погрешности станции (3, GWi) в проверяемом положения координат (k, l),  - расстояние между проверяемым положением (k, l) и станцией (3, GWi),
- расстояние между проверяемым положением (k, l) и станцией (3, GWi),  - расстояние между проверяемым положением (k, l) и опорной станцией, Ti - дата приема радиосигнала (2) станцией (3, GWi), T0 - дата приема радиосигнала (2) опорной станцией; C - скорость распространения радиосигнала (2) переданного устройством (1) передачи сигнала.
- расстояние между проверяемым положением (k, l) и опорной станцией, Ti - дата приема радиосигнала (2) станцией (3, GWi), T0 - дата приема радиосигнала (2) опорной станцией; C - скорость распространения радиосигнала (2) переданного устройством (1) передачи сигнала.
5. Способ по одному из пп. 1-4, в котором степень суммарной погрешности подзоны (17, 25, 28) представляет собой сумму параметров погрешности передачи множества приемных станций (3, GWi) для упомянутой подзоны (17, 25, 28).
6. Способ по одному из пп. 1-5, дополнительно содержащий этапы, на которых определяют пороговое значение качества сигнала и не учитывают радиосигнал, принятый приемными станциями, качество приема радиосигнала которых ниже определенного порогового значения качества сигнала.
7. Способ по одному из пп. 1-6, дополнительно содержащий этапы, на которых определяют пороговую дату приема и не учитывают радиосигнал, принятый станциями, имеющими дату приема сигнала, превышающую пороговую дату приема.
8. Способ по одному из пп. 1-7, дополнительно содержащий этапы, на которых определяют, что расстояние между двумя приемными станциями (3, GWi) меньше пороговой разности, и выполняют этап c) определения зоны (13) сканирования с использованием общего положения для упомянутых двух приемных станций (3, GWi), расстояние между которыми меньше пороговой разности.
9. Способ по одному из пп. 1-8, в котором радиосигнал (2), передаваемый устройством (1) передачи сигнала, содержит полезную нагрузку и заголовок, причем упомянутый заголовок содержит идентификатор и дату передачи упомянутого радиосигнала (2), причем способ дополнительно содержит этап, на котором идентифицируют радиосигнал каждой приемной станцией (3, GWi) с использованием идентификатора, содержащегося в заголовке сигнала.
10. Способ по одному из пп. 1-9, в котором множество приемных станций (3, GWi) подключены к серверу (7), причем способ дополнительно содержит этап, на котором для каждой приемной станции (3, GWi) передают на сервер (7) сообщение (8), содержащее идентификатор радиосигнала, показатель качества приема радиосигнала (2) приемной станцией (3, GWi), дату приема радиосигнала (2) и идентификатор приемной станции (3, GWi).
11. Устройство для определения географического местоположения устройства передачи радиосигнала, которое передает радиосигнал, содержащее:
a) модуль выбора для выбора опорной станции (3, GWi) из множества приемных станций (3, GWi), принявших радиосигнал (2),
b) модуль определения зоны (13) сканирования, выполненный с возможностью определения зоны (13) сканирования в зависимости от положений (Xi, Yi) упомянутых приемных станций (3, GWi),
c) модуль подразделения, выполненный с возможностью подразделения зоны (13) сканирования на множество подзон (17) в зависимости от шага сканирования,
d) модуль вычисления степени суммарной погрешности, выполненный с возможностью для каждой подзоны (17 25, 28) вычисления степени суммарной погрешности упомянутой подзоны (17, 25, 28), причем вычисление степени суммарной погрешности упомянутой подзоны (17, 25, 28) содержит:
определение проверяемого положения (k, l), включенного в упомянутую подзону (17, 25, 28),
вычисление для каждой приемной станции (3, GWi) соответствующего параметра () погрешности передачи в зависимости от даты (Ti) приема радиосигнала (2) упомянутой приемной станцией (3, GWi), даты (T0) приема радиосигнала (2) опорной станцией, скорости (C) распространения радиосигнала (2), расстояния () между проверяемым положением (k, l) и упомянутой приемной станцией (3, GWi) и расстояния () между проверяемым положением (k, l) и опорной станцией,
вычисление степени суммарной погрешности подзоны (17, 25, 28) в зависимости от параметров () погрешности передачи, вычисленных для всех приемных станций (3, GWi),
e) модуль выбора подзоны, выполненный с возможностью выбора подзоны (22, 27), имеющей минимальную степень суммарной погрешности, в качестве подзоны (22, 27) местоположения устройства (1) передачи сигнала,
в котором модуль определения зоны сканирования также выполнен с возможностью определения новой зоны (23, 26) сканирования, при этом новая зона (23, 26) сканирования включает в себя и отцентрирована в подзоне (22, 27) местоположения, выбранной модулем выбора подзоны, модуль подразделения также выполнен с возможностью определения нового шага сканирования меньшего, чем шаг сканирования, причем устройство для определения географического местоположения выполнено с возможностью итеративного определения географического местоположения устройства передачи сигнала на основе зон сканирования и шага, итеративно определяемых модулем определения зоны сканирования и модулем подразделения, и в котором на каждой итерации новую зону (23, 26) определяют как равную подзоне (22, 27) местоположения, выбранной модулем выбора подзоны, дополненной допуском, полностью окружающим подзону (22, 27) местоположения, ширина которого больше, чем шаг сканирования.
12. Машиночитаемый носитель для хранения данных, на котором содержатся инструкции программного кода для реализации этапов способа по любому одному из пп. 1-10 при выполнении упомянутого программного кода на компьютере.
| US 5058200 A, 15.10.1991 | |||
| US 2010138184 A1, 03.06.2010 | |||
| US 2003146871 A1, 07.08.2003 | |||
| EP 1301057 A1, 09.04.2003 | |||
| US 6108555 A, 22.08.2000 | |||
| СПОСОБ И УСТРОЙСТВО ДЛЯ ПОВЫШЕНИЯ С ПОМОЩЬЮ ИЗМЕРЕНИЙ ТОЧНОСТИ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ РАДИОТЕХНИЧЕСКИМ МЕТОДОМ | 2009 |
|
RU2494411C2 |
| СПОСОБ И СИСТЕМА ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ НА ОСНОВЕ КАЧЕСТВА | 2001 |
|
RU2255433C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ В СЕТЯХ ПОДВИЖНОЙ РАДИОСВЯЗИ | 2010 |
|
RU2458464C1 |

