Изобретение относится к исполнительному органу для приведения в действие приспособления летательного аппарата, в частности самолета, содержащему бесконтактно работающий датчик. Кроме того, изобретение относится к летательному аппарату, содержащему соответствующий исполнительный орган, однако возможно также применение в области транспортной техники.
Из уровня техники известны исполнительные органы летательных аппаратов, которые служат для перемещения или, соответственно, приведения в действие приспособлений летательных аппаратов. При этом известно выполнение контролирования состояния исполнительного органа, например, для регулирования положения, скорости и/или ускорения исполнительного органа, при этом дополнительно известно измерение внутри заданных границ безопасности посредством измерения соответствующих положению или, соответственно силы и/или крутящего момента, данных для электрогидравлических вспомогательных исполнительных органов (EHSA), электрогидростатических исполнительных органов (ЕНА/ЕВНА) и электромеханических исполнительных органов (ЕМА), например, в первичном управлении летательного аппарата или транспортной техники.
Первым известным способом измерения крутящего момента на вращающихся частях является применение торсиона. Если вал скручивается в осевом направлении, то образуется угол скручивания, который пропорционален приложенному моменту скручивания. Этот угол можно измерять с помощью индуктивной системы измерения угла. Питающее напряжение для измерительной системы и измерительный сигнал передаются с помощью поворотного трансформатора.
Однако за счет модулированного по амплитуде измерительного сигнала эта система очень чувствительна к осевым и радиальным сдвигам, вращению с биением, изменению магнитных свойств материалов и к магнитному шунтированию. За счет этого могут возникать значительные неточности измерения. Помехи, такие как, например, изменения температуры, можно, если вообще возможно, компенсировать лишь в измерительном усилителе, так что всегда следует учитывать температурные характеристики измерительного сигнала.
Известно также применение тензорезисторов или, соответственно, тензорезисторных датчиков крутящего момента, для измерения крутящего момента. Питающее напряжение и выходное напряжение передаются с помощью контактных колец на сидящий на валу тензорезистор. Установка контактных колец требует определенной точности, поскольку они должны быть изолированы как от вала, так и друг от друга. Также давление прижатия скользящих контактов должно точно устанавливаться с целью предотвращения слишком большого нагревания или, соответственно, поднимания.
Недостатками этой измерительной техники являются, прежде всего, ошибки измерения уже при небольших неисправностях изоляции, быстрый износ контактных колец и ограниченная за счет этого окружная скорость. Этот способ улучшается за счет передачи без контактных колец измерительных сигналов. За счет питания переменным током тензорезисторного моста получают в качестве выходного сигнала пропорциональное крутящему моменту переменное напряжение. Питающее напряжение и измерительный сигнал передаются с помощью поворотного трансформатора. За счет дальнейшего развития тензорезисторной технологии, тензорезисторные датчики можно изготавливать в настоящее время с компенсацией температуры, а также с компенсацией поверхностных токов утечки.
Это обеспечивает возможность непосредственной компенсации помех. Становящаяся все более миниатюрной электроника и связанное с этим улучшение точности измерения делают тензорезисторную технику измерения крутящего момента в настоящее время стандартной техникой измерения. Однако и эта техника имеет многие недостатки. Крутящий момент нельзя измерять в любом месте, приклеивание тензорезистора нарушается при ударных изменениях нагрузки (например, при торможении), и часто возникают проблемы передачи через антенны.
В некоторых случаях датчики крутящего момента, которые работают по принципу дифференциального трансформатора, лучше подходят, чем тензорезисторные датчики. Они состоят из торсионного вала, на котором расположено несколько катушек. Исходя их одной катушки, индуцируется напряжение в других катушках. Величина индуцируемого напряжения зависит от положения катушек относительно друг друга. Положение катушек, в свою очередь, зависит от прилагаемого крутящего момента и представляет угол (угол скручивания), на который скручивается торсионное тело на определенной длине. Катушка на основании скручивания переводится из первоначального положения, и тем самым изменяется индукция/связь.
Внутри первичного управления полетом и перечисленных ниже применений, обеспечивается возможность измерения положения, силы и/или крутящего момента в большинстве случаев лишь с ограничениями.
Поскольку известные в настоящее время способы или, соответственно, устройства имеют названные технические, или, соответственно, коммерческие недостатки, то задачей изобретения является создание улучшенного устройства, которое, в частности, менее чувствительно к помехам, чем известные устройства.
Эта задача решена, согласно изобретению, с помощью исполнительного органа с признаками пункта 1 формулы изобретения. Предпочтительные варианты выполнения являются предметом зависимых пунктов формулы изобретения. В соответствии с этим, предусмотрен исполнительный орган, содержащий по меньшей мере один бесконтактно работающий датчик, который расположен в пути передачи нагрузки исполнительного органа. Понятие «бесконтактно» может относиться в данном случае к состоянию, в котором датчик и измеряемый датчиком компонент для измерения не обязательно должны быть в непосредственном физическом контакте друг с другом. Может иметься, например, воздушный зазор между датчиком и компонентом. Сюда входит также случай, когда лишь часть датчика расположена в пути нагрузки, а другая часть датчика расположена вне пути нагрузки.
С помощью датчика и на основании бесконтактного измерения положений, сил и/или крутящих моментов обеспечивается возможность создания, в частности, для электрогидравлических, вспомогательных, электрогидростатических исполнительных органов, методов и алгоритмов, которые обеспечивают надежно и без износа возможность
а) определения появления ошибки на приборе (мониторинг), например, изменяющегося трения, люфта или жесткости;
b) прогнозирования появления ошибки на приборе (НМ);
с) ограничения возникающих в системе нагрузок; или
d) подготовки информации для регулировочных контуров, в частности, компенсации/уменьшения «конфликтов сил» (Force Fights).
В противоположность обычно используемым в первичном управлении полетом обычным гидравлическим исполнительным органам, для электромеханических приводов имеется более высокая вероятность заклинивания (случаи а и b). Заклинивание исполнительного органа должно максимально исключаться. Хорошую возможность предотвращения заклинивания исполнительного органа обеспечивает контролирование состояния исполнительного органа.
В случае нескольких активно включенных исполнительных органов на одной рулевой поверхности (например, руля, элерона, руля высоты) могут быть компенсированы или, соответственно, уменьшены конфликты сил с помощью исполнительных органов, и внутри структуры - с помощью активного регулирования сил исполнительных органов (случай с).
За счет измерения силы, которую исполнительный орган (преимущественно электромеханически) вводит в структуру, можно применять также активное контролирование/ограничение этой силы для защиты структуры в нормальном режиме работы, а также в специальных случаях неисправности (случай d).
В одном предпочтительном варианте выполнения изобретения возможно, что предусмотрено по меньшей мере два, в частности расположенных параллельно друг другу, и различных линейных участка датчика, которые различаются по меньшей мере за счет различной длины в продольном направлении. С помощью двух или более линейных участков можно точно разделять заданным образом, например, магнитный компонент датчика. Это точное разделение магнитного компонента можно считывать с помощью другого компонента, в частности считывающего компонента, датчика и использовать, среди прочего, для определения указанных выше параметров, соответственно, значений.
Предусмотрено, что имеется по меньшей мере два бесконтактно работающих датчика, из которых один расположен снаружи пути нагрузки исполнительного органа. При этом расположенный снаружи пути нагрузки датчик можно использовать для измерения опорных значений, с помощью которых можно выполнять коррекцию измеряемых параметров исполнительного органа или, соответственно, измерять их более точно.
В другом предпочтительном варианте выполнения возможно, что предусмотрено управляющее/регулировочное устройство, которое предназначено для контролирования состояния, для контролирования силы с целью защиты структуры, и/или для предотвращения/уменьшения конфликтов сил с помощью по меньшей мере одного датчика. Таким образом, с помощью управляющего/регулировочного устройства могут выполняться функции контролирования рабочего состояния, анализа износа, анализа нагрузки, для содержания в исправности и/или для контролирования конфликтов сил избыточно выполненных исполнительных органов.
В другом предпочтительном варианте выполнения возможно, что по меньшей мере один датчик предназначен для выполнения магниторезистивных измерений.
В другом предпочтительном варианте выполнения возможно, что управляющее/регулировочное устройство предназначено для выполнения измерений и/или вывода физических величин силы, крутящего момента, положения и/или скорости исполнительного органа, и/или для использования физических величин нагрузки, крутящего момента, положения и/или скорости исполнительного органа.
В другом предпочтительном варианте выполнения возможно, что датчик снаружи пути нагрузки предназначен для компенсации температуры.
Кроме того, в другом предпочтительном варианте выполнения возможно, что датчик заделан по меньшей мере частично в исполнительный орган с помощью, в частности, высокоточного приложения магнитного поля, и/или выполнен в виде по меньшей мере одной стрикционной полосы.
За счет заделывания или, соответственно, введения датчика или, соответственно, частей датчика, таких как, например, линейный участок, в компоненты исполнительного органа, соответственно, за счет выполнения датчика или частей датчика в виде стрикционной полосы, возможно предусмотрение частей датчика почти в любых положениях на исполнительном органе и тем самым при необходимости выбора положений, которые особенно защищены, например, за счет их внутреннего расположения.
В другом предпочтительном варианте выполнения возможно, что приложенное магнитное поле и/или стрикционная полоса расположены в зоне, которая выходит за подлежащую измерению зону. При этом понятие созданного магнитного поля не следует понимать ограниченно, и оно охватывает магнитные поля, которые созданы любым образом. Подлежащая измерению зона исполнительного органа относится к зоне, в которой с помощью датчика могут выполняться измерения. Таким образом, датчик, созданное магнитное поле или стрикционная полоса и тем самым соответствующая часть датчика могут проходить по большей зоне, чем измеряемая или, соответственно, измеренная датчиком зона исполнительного органа. За счет этого может особенно просто обеспечиваться возможность выполнения измерений внутри подлежащей измерению зоны.
Возможно, что несколько датчиков расположено в пути нагрузки или вне пути нагрузки исполнительного органа.
При расположении вне пути нагрузки обеспечивается то преимущество, что нет необходимости в компонентах измеренных значений для компенсации возникающих за счет передачи нагрузки деформаций. В соответствии с этим, управление или, соответственно, регулирование исполнительного органа может выполняться более просто.
В другом предпочтительном варианте выполнения дополнительно возможно, что приспособление является по меньшей мере рулем высоты, элероном, рулем направления, спойлером, регулировкой несущего винта или регулировкой заднего винта вертолета.
В другом предпочтительном варианте выполнения возможно, что исполнительный орган является исполнительным органом для приведения в действие шасси, рулей, или их блокирования, и/или что исполнительный орган является исполнительным органом для применения в транспортной технике.
Кроме того, может быть предусмотрено, что первичный компонент датчика расположен на поршневом штоке и/или на поворотном валу и/или на первой части корпуса исполнительного органа, и/или что вторичный компонент датчика расположен на второй части корпуса исполнительного органа, или наоборот. Первичный компонент может быть приемником или, соответственно, компонентом для измерения магнитного поля или, соответственно, для обнаружения изменения магнитного поля, в то время как вторичный компонент может быть указанным выше влиянием магнитного поля и/или стрикционной полосой. Кроме того, понятие часть корпуса следует понимать широко, и оно может охватывать, в противоположность поршневому штоку или поворотному валу, не движущиеся компоненты исполнительного органа. При выполнении в виде цилиндропоршневого устройства, в котором цилиндр по меньшей мере частично неподвижен относительно летательного аппарата, например, цилиндр устройства может быть соответствующей частью корпуса.
В другом предпочтительном варианте выполнения возможно, что датчик содержит несколько, в частности параллельно расположенных стрикционных полос, и/или что один или более датчиков расположены в различных или одинаковых инерциальных системах исполнительного органа.
Под инерциальными системами понимаются в данном случае системы или, соответственно, участки исполнительного органа, которые, в частности при обычной работе, подвижны относительно друг друга. С помощью большого количества стрикционных полос можно увеличивать разрешение датчика. Подробности этого следуют из описания чертежей.
В другом предпочтительном варианте выполнения возможно, что исполнительный орган является исполнительным органом EHSA, EHA, EBHA или ЕМА.
Изобретение также относится к летательному аппарату, в частности самолету, содержащему по меньшей мере один исполнительный орган по любому из п.п. 1-14 формулы изобретения.
Изобретение относится также к соответствующему способу приведения в действие исполнительного органа по любому из п.п. 1-14 формулы изобретения, содержащему по меньшей мере один бесконтактно работающий датчик, который расположен в пути нагрузки исполнительного органа, и по меньшей мере один датчик, который расположен вне пути нагрузки исполнительного органа. Способ включает стадию
компенсации температуры с помощью расположенного вне пути нагрузки датчика.
Другие подробности и преимущества изобретения следует из приведенного ниже описания вариантов выполнения со ссылками на прилагаемые чертежи, на которых изображено:
фиг. 1 - стрикционные полосы в EHSA в шатуне для измерения положения;
фиг. 2 - стрикционные полосы во вращающемся ЕМА;
фиг. 3 - расположение датчиков для измерения силы с температурной компенсацией;
фиг. 4 - фазовый сдвиг стрикционной модуляции при движении;
фиг. 5 - стрикционные полосы для комбинированного измерения положения и силы;
фиг. 6 - комбинированное измерения торсионного угла и крутящего момента;
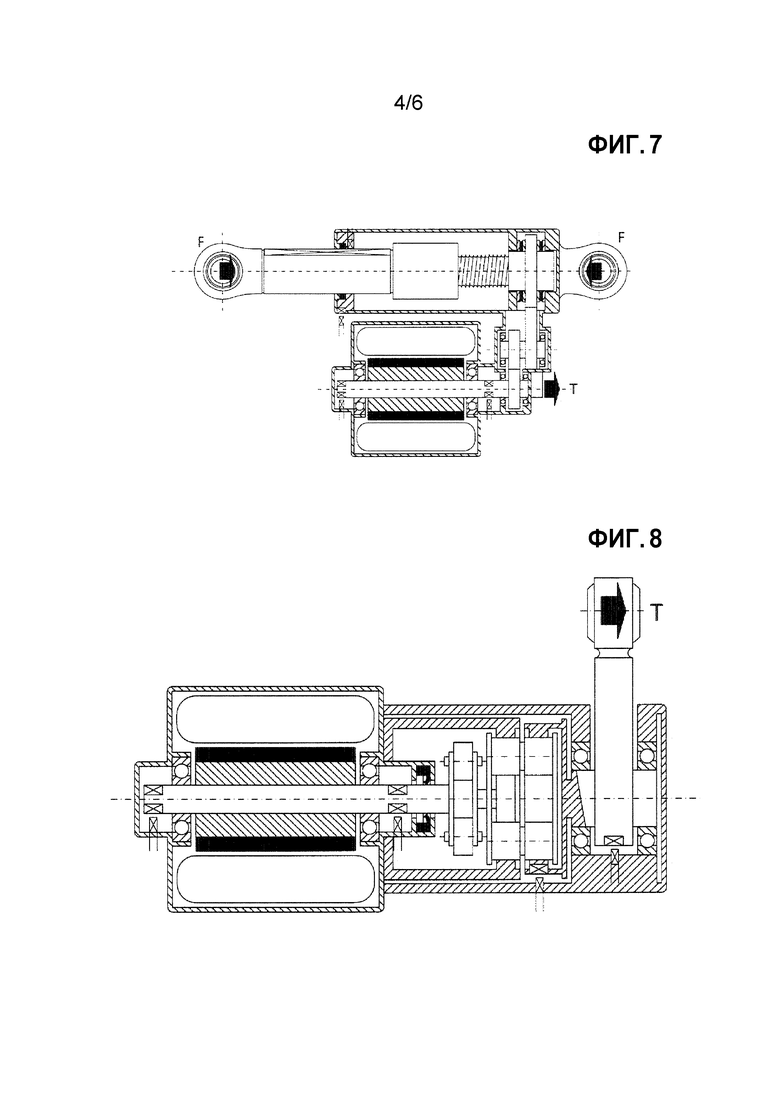
фиг. 7 - измерение нагрузки, измерение люфта и/или измерение жесткости на линейном ЕМА;
фиг. 8 - измерение люфта во вращающемся ЕМА;
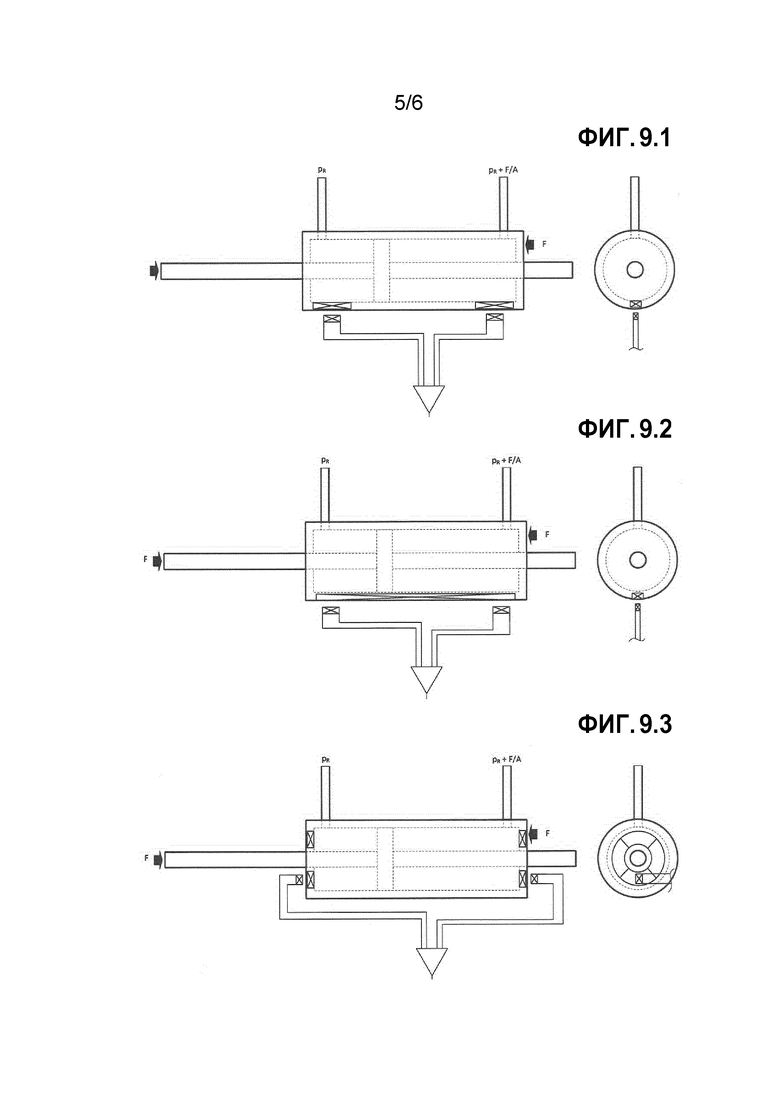
фиг. 9.1-9.3 - различные измерения давления, соответственно, измерения нагрузки на гидравлическом грузовом цилиндре;
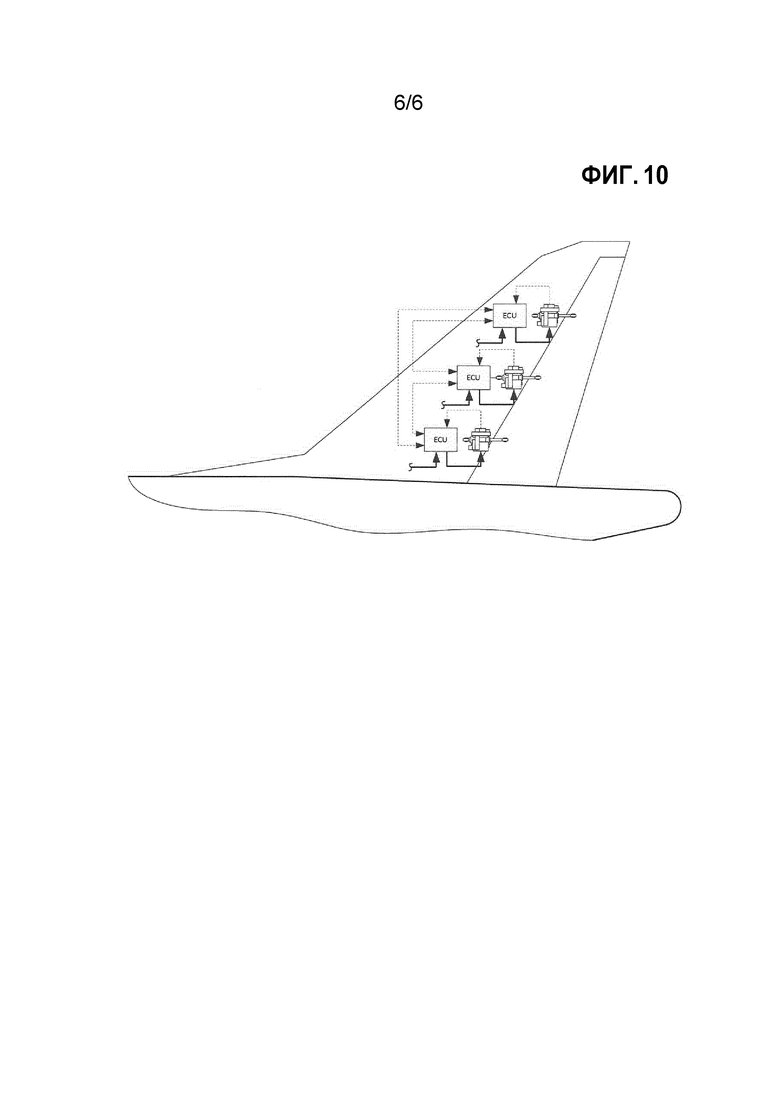
фиг. 10 - часть летательного аппарата, согласно изобретению.
В зависимости от подлежащей достижению точности, достигается желаемое разрешение измерения с помощью датчика, например, тем, что применяется несколько стрикционных полос или, соответственно, магнитных компонентов. Эти полосы могут иметь различную модуляцию и обеспечивать по всему ходу исполнительного органа однозначный сигнал положения. Для этой цели начало и конец модуляции могут быть расположены или, соответственно, смещены вне подлежащей измерению зоны.
В частности, при линейном измерении положения может изменяться длина первичного датчика под нагрузкой, что делает необходимой компенсацию нагрузки. Эта компенсация нагрузки может осуществляться по выбору с помощью трех различных способов:
1. Обратный расчет изменения периода стрикционной модуляции с применением сигналов фактического положения нескольких стрикционных полос с известными соотношениями периодов.
2. Измерения во времени отдельного стрикционного периода при быстром движении с известным ходом.
3. При наличии с помощью сигнала нагрузки и модуля упругости и модуля упругости при сдвиге материала. Комбинированное измерение нагрузки и положения поясняется подробно ниже.
Стрикционные полосы удлиняются не только при нагрузке, но также в зависимости от температуры несущего материала. Основание для температурной компенсации сравнимо с мостовой схемой принципа DMS, и/или может осуществляться с помощью эталонного измерения вне пути нагрузки (смотри компенсацию температуры при измерении силы, согласно фиг. 3). Оно содержит исключительно удлинение конструктивных элементов на основании колебаний температуры.
Если первичный и вторичный датчик расположены в различных инерциальных системах (например, один датчик на корпусе, другой - на поршневом штоке или на поворотном валу), то возникает при измерении, например, при больших скоростях движения и низких несущих частотах, дополнительно эффект Доплера при измерении сигналов. Из скорости движения, длин волн и частот можно легко вычислять необходимую компенсацию.
λB=λS -
где
λB - измеренная длина волны на вторичном датчике,
λS - длина волны стрикционной модуляции на первичном датчике,
νS - скорость движения шатуна,
fS - эффективная несущая частота на первичном датчике.
Если применяется эталонный датчик и соответствующие первичные и вторичные компоненты измерительных и эталонных датчиков расположены в одной и той же инерциальной системе (см. фиг. 3), то необходимость этого перерасчета отпадает.
В классическом EHSA датчик положения может быть расположен независимо от нагрузки на или в шатуне, или, соответственно, на или в корпусе цилиндра. При этом может иметься линейное кодирование первичного датчика.
Кроме того, можно выполнять измерение скорости движения. В ротационной системе измерение положения выполняется в пути нагрузки и должно компенсироваться. При этом может иметься ротационное кодирование первичного датчика.
При измерении нагрузки различают два вида нагрузки: силу и крутящий момент.
При измерении силы, в частности, на линейных исполнительных органах (EHSA, ЕНА, ЕВНА, линейные ЕМА) датчик силы может быть расположен независимо от положения на или в корпусе цилиндра, на или в шатуне. Предпочтительным является выполнение 1 (см. фиг. 3), поскольку сам датчик не движется, и тем самым предотвращается дополнительная опасность возможного повреждения (например, поломка кабеля за счет усталости) или помехи на основании движения компонентов датчика. При выполнении с двумя датчиками в различных инерциальных системах на подвижном шатуне, при оценке учитываются:
1) изменяемая фаза сигнала (см. фиг. 4) по выбору за счет применения сигнала положения или нескольких стрикционных полос, а также
2) влияние указанного выше эффекта Доплера на измеренный период сигнала.
При комбинированном измерении нагрузки и положения или, соответственно, в частности измерении силы и хода, можно с применением оценки нагрузки выполнять более гибко измерение положения. С одной стороны, измерение положения можно выполнять вне пути нагрузки, и с другой стороны, в комбинации с измерением нагрузки. При этом может выбираться период модуляции, и/или можно выполнять компенсацию температуры отдельно.
Измерение люфта можно выполнять после смены нагрузки посредством сравнения входного и выходного положения при достижении второго состояния без нагрузки. Если не имеются состояния полностью без нагрузки, то можно вычитать удлинение, полученное из жесткости и нагрузки, из разницы положений, с целью достижения улучшенной точности.
Измерение жесткости можно выполнять аналогично измерению люфта посредством сравнения входного и выходного положения, однако при различных нагрузках и при остающемся одинаковым направлении нагрузки. В качестве альтернативного решения, можно оценивать жесткость также при возникающей смене направления нагрузки после вычитания люфта.
Измерение силы можно выполнять посредством образования разницы между отдельными измерениями давления в камере. Соответствующие измерения давления в камере выполняются на основе эластичного расширения периметра двух независимых магнитных стрикционных полей, как показано на фиг. 9.1.
В качестве альтернативного решения или дополнительно, измерение силы можно выполнять посредством определения разницы давления камеры, при этом разница давления камеры измеряется на основе изменяющегося по длине цилиндра эластичного расширения окружности магнитных стрикционных полей, распределенных по всей длине цилиндра. Стрикционные поля или, соответственно, магнитный компонент может проходить, соответственно, по всей длине цилиндра или, соответственно, длине исполнительного органа, или по существенному участку продольной стороны цилиндра, соответственно продольной стороне исполнительного органа. Это иллюстрировано на фиг. 9.2.
Кроме того, измерение силы можно выполнять посредством определения разницы давления камеры, при этом измерения разницы давления осуществляется на основе эластичного расширения окружности магнитного стрикционного поля на торцевых стенках напорной камеры. За счет применения соответствующего вторичного датчика на каждой камере цилиндра можно определять относительную разницу расширения камер относительно друг друга. Это иллюстрировано на фиг. 9.3.
Возможная область использования исполнительного органа может распространяться на физические исполнительные системы, включая сервоприводы следующих приспособлений:
Приспособления управления полетом, такие как, например, рули высоты, элероны, рули направления, спойлеры, регулировки несущего винта (или аналога) или регулировки заднего винта (или аналога) вертолета.
За счет выполняемого с помощью данного изобретения измерения бесконтактно положений, сил и/или крутящих моментов, можно значительно более точным, простым и без износа образом использовать, соответственно, создавать соответствующие сигналы для
а) контролирования состояния (рабочего состояния),
d) контролирования силы для защиты структуры (ограничения/отключения),
с) предотвращения/уменьшения конфликтов сил (компенсация конфликтов сил), электромеханических исполнительных органов в их окружении (структуре) при специальном применении внутри первичного управления полетом.
Информация о положении, силе и/или крутящем моменте является соответствующими сигналами для реализации простого и стабильного контролирования состояния. В частности, оценка износа и регистрация усталостной нагрузки нуждаются в надежной регистрации нагрузки.
А именно, информация силы и/или крутящего момента используется в качестве отключающей или ограничивающей функции для исполнительного органа при применении их в указанных областях использования. За счет этого можно контролировать, распознавать и предотвращать возможные повреждения исполнительных органов и/или структур самолета.
В случае нескольких активных исполнительных органов на одной рулевой поверхности (см. фиг. 10), точная информация о возникающих силах и крутящих моментах на исполнительных органах, соответственно, на структуре, является основной предпосылкой для надежной и быстрой компенсации сил. В идеальном случае можно за счет этого оптимизировать исполнительные органы и части структуры относительно веса и размера на основании небольших потоков сил.
За счет применения нового сенсорного принципа, а также, возможно, надежного процесса изготовления (например, высокоточное воздействие магнитного поля), можно создавать, обрабатывать и/или использовать новые датчики и/или компоненты исполнительных органов или, соответственно, исполнительные органы. За счет бесконтактной передачи и тем самым без износа сигналов, могут быть устранены системы проводов (первичные и вторичные кабели) центрально в летательном аппарате или, соответственно, могут быть интегрированы в исполнительный орган. Дополнительно к этому, за счет новых возможностей интегрирования датчиков в устройствах, они оптимально защищаются от специфичных для полетов жестких влияний окружения (песка, пыли, обледенения, электромагнитных интерференций). Эти новые бесконтактные, без износа и тем самым с небольшим техническим обслуживанием полученные сигналы датчиков или, соответственно, компоненты датчиков, создают основные предпосылки для:
а) увеличения срока службы электромеханических исполнительных органов в первичном и/или вторичном управлении полетом,
b) обеспечения возможности установки с высокой степенью интегрирования новых датчиков (нет необходимости в LRU, хорошая доступность датчиков и возможность замены),
с) создания высокоточных и защищенных от влияния окружения (песка, пыли, обледенения, электромагнитных помех) сигналов датчиков (силы, крутящего момента и положения), регулировочных контуров и алгоритмов и возможности их оценки,
d) обеспечения возможности создания комбинаций два в одном, и тем самым возможности экономии до настоящего времени дополнительного отдельного датчика (датчик может быть выполнен для выдачи комбинации сигналов (два в одном) из информации силы, крутящего момента и/или положения),
е) обеспечения надежного и стабильного регулирования исполнительного органа,
f) обеспечения надежного и стабильного контролирования рабочего состояния оборудования.
Для обеспечения возможности применения стабильного контролирования рабочего состояния оборудования (НМ), необходимы обязательно верифицированные алгоритмы и стабильные в течение длительного времени сигналы датчиков. Точность и стабильность алгоритмов НМ непосредственно зависят от используемых датчиков и положений их установки. Новое, бесконтактное, без износа и высокоточное измерение, согласно изобретению, релевантных для техники регулирования величин сигналов, таких как, например, силы, крутящего момента и положения, обеспечивают концепцию надежного и стабильного контролирования рабочего состояния оборудования.
За счет бесконтактной передачи обеспечиваются новые положения установки датчиков (с высокой степенью интеграции). Новые возможности установки повышают, с одной стороны, точность и добротность сигналов датчиков (например, позиционирование и измерение силы полностью в пути силы) и тем самым обеспечивают также новые технические возможности применения. За счет высокой степени интегрирования измерения сигналов, датчики лучше защищены от внешних воздействий, таких как пыль, грязь, лед и электромагнитное излучение. За счет высокой степени интегрирования и обусловленной этим опосредованной защиты датчиков, могут быть сильно уменьшены и тем самым минимизированы защитные схемы датчика.
Другое новшество состоит в комбинации сигналов датчиков. Новые бесконтактно работающие датчики допускают, среди прочего, комбинацию три в одном (например, крутящего момента, положения и скорости). Новая возможность комбинации три в одном способствует стремлению дальнейшего улучшения надежности и доступности исполнительных органов. Кроме того, это приводит к оптимизации стоимости, веса и объема.
На фиг. 1 показан пример выполнения исполнительного органа, согласно изобретению, для приведения в действие приспособления летательного аппарата, в частности самолета, при этом показан вариант выполнения, в котором датчик расположен в шатуне, соответственно внутри шатуна, цилиндропоршневого устройства. При этом датчик может быть предусмотрен независимо от нагрузки в зоне шатуна, который не служит для передачи сил между шатуном и корпусом цилиндра. Магнитный компонент, соответственно стрикционная полоса, датчика может быть выполнен с возможностью движения вместе с шатуном. Магнитный компонент, соответственно стрикционная полоса, содержит дополнительно в примере выполнения на фиг. 1 пять линейных участков, которые могут быть расположены, в частности, параллельно друг другу. Линейные участки имеют частичные участки, которые содержат расположенные попеременно рядом с друг с другом южные полюса и северные полюса. Кроме того, на фиг. 2 показан вариант выполнения, в котором магнитный компонент, соответственно стрикционная полоса, предусмотрена на вращающемся ЕМА. На фиг. 5 показаны варианты выполнения изобретения, в которых стрикционные полосы для комбинированного измерения положения и силы расположены, в частности, в окружном направлении выполненного в качестве примера в виде цилиндропоршневого устройства исполнительного органа. На фиг. 6 показан вариант выполнения, в котором первичный датчик расположен в окружном направлении выполненного в виде ротационного исполнительного органа исполнительного органа. При этом датчик можно использовать для комбинированного определения торсионного угла и момента. На фиг. 7 и 8 показаны варианты выполнения, которые предназначены для измерения люфта на линейном, соответственно, ротационном электромеханическом исполнительном органе. При этом первичный датчик также может быть расположен в окружном направлении исполнительного органа.
Требуемый для настройки выдаваемых датчиком сигналов электронный блок может быть расположен на исполнительном органе и/или в отдельном вычислительном устройстве. Устройство можно использовать для определения предельных значений и/или кривых тренда, из которых может быть выведена информация о рабочем состоянии, соответственно состоянии износа, исполнительного органа. При этом можно измерять положения, соответственно влияния сил, и/или дельта-положения в или вне пути нагрузки исполнительного органа. Измерение нагрузки можно предпочтительно выполнять через измерение крутящего момента и, в частности, с помощью магнитнорезистивного измерения.
Группа изобретений относится к исполнительному органу для приведения в действие приспособления управления полетом летательного аппарата и летательному аппарату, который его содержит. Исполнительный орган содержит два бесконтактно работающих датчика, один из которых расположен в пути нагрузки исполнительного органа, а другой - вне пути нагрузки. Обеспечивается уменьшение чувствительности к помехам. 2 н. и 11 з.п. ф-лы, 12 ил.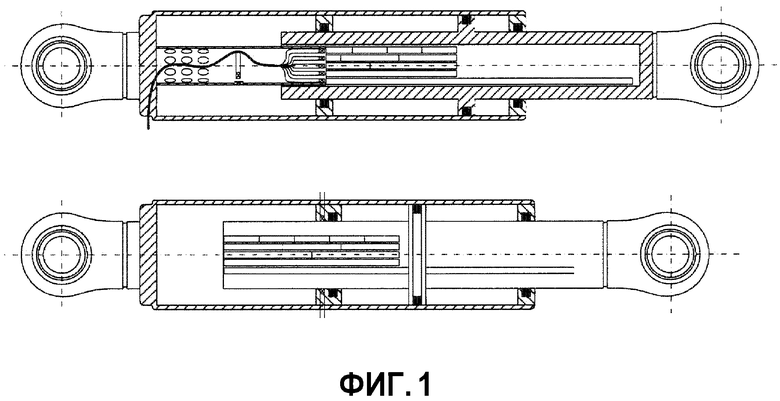
1. Исполнительный орган для приведения в действие приспособления управления полетом летательного аппарата, в частности самолета, содержащий по меньшей мере два бесконтактно работающих датчика, отличающийся тем, что один датчик расположен в пути нагрузки исполнительного органа, причем один датчик расположен вне пути нагрузки исполнительного органа.
2. Исполнительный орган по п. 1, отличающийся тем, что предусмотрено управляющее/регулировочное устройство, которое предназначено для контролирования состояния, для контролирования сил для защиты структуры и/или для предотвращения/уменьшения конфликтов сил с помощью по меньшей мере одного датчика.
3. Исполнительный орган по п. 1 или 2, отличающийся тем, что по меньшей мере один датчик предназначен для выполнения магниторезистивных измерений.
4. Исполнительный орган по п. 2, отличающийся тем, что управляющее/регулировочное устройство предназначено для выполнения измерений и/или вывода физических величин нагрузки, крутящего момента, положения и/или скорости исполнительного органа, и/или для использования физических величин нагрузки, крутящего момента, положения и/или скорости исполнительного органа.
5. Исполнительный орган по любому из пп. 1-4, отличающийся тем, что датчик вне пути нагрузки предназначен для компенсации температуры.
6. Исполнительный орган по любому из пп. 1-5, отличающийся тем, что датчик заделан по меньшей мере частично в исполнительный орган с помощью, в частности, высокоточного приложения магнитного поля и/или выполнен в виде по меньшей мере одной стрикционной полосы.
7. Исполнительный орган по п. 6, отличающийся тем, что приложенное магнитное поле и/или стрикционная полоса расположены в зоне, которая выходит за подлежащую измерению зону.
8. Исполнительный орган по любому из пп. 1-7, отличающийся тем, что приспособление является по меньшей мере рулем высоты, элероном, рулем направления, спойлером крена, наземным спойлером, регулировкой несущего винта или регулировкой заднего винта вертолета.
9. Исполнительный орган по любому из пп. 1-8, отличающийся тем, что исполнительный орган является исполнительным органом для приведения в действие шасси, рулей или их блокирования.
10. Исполнительный орган по любому из пп. 1-9, отличающийся тем, что первичный компонент датчика расположен на поршневом штоке, и/или на поворотном валу, и/или на первой части корпуса исполнительного органа, и/или что вторичный компонент датчика расположен на второй части корпуса исполнительного органа, или наоборот.
11. Исполнительный орган по любому из пп. 1-10, отличающийся тем, что датчик содержит несколько, в частности, параллельно расположенных стрикционных полос и/или что один или более датчиков расположены в различных или одинаковых инерциальных системах исполнительного органа.
12. Исполнительный орган по любому из пп. 1-11, отличающийся тем, что исполнительный орган является исполнительным органом EHSA, EHA, EBHA или ЕМА.
13. Летательный аппарат, в частности самолет, содержащий по меньшей мере один исполнительный орган по любому из пп. 1-12.
| WO 2010016829 A1, 11.02.2010 | |||
| WO 2015078724 A1, 04.06.2015 | |||
| EP 3096123 А1, 23.11.2016 | |||
| RU 2011135881A, 27.03.2013 | |||
| СПОСОБ ИЗМЕРЕНИЯ ДАВЛЕНИЯ | 2009 |
|
RU2426079C1 |

