Изобретение относится к управляющей системе для управления по меньшей мере двумя основанными на различных технологиях исполнительными органами, например, рулевой поверхности летательного аппарата, в частности самолета.
Из уровня техники известны различные концепции систем управления исполнительными органами, которые служат для обеспечения возможности совместного использования различных исполнительных органов для приведения в действие рулевых (=управляющих) поверхностей летательного аппарата. Так, например, известны концепции систем управления/регулирования, которые имеют конфигурацию из усилительных исполнительных органов (EHSA) и электро-гидростатических исполнительных органов (ЕНА), в которых сравниваются разностные давления обоих исполнительных органов и направляются обратно через регулятор PID в исполнительную команду исполнительных органов, с целью выравнивания их управляющих сил за счет согласования позиционирования. При этом известно выполнение изменения мертвых зон управляющих сигналов, за счет чего осуществляется согласование времени реакции, соответственно характеристик срабатывания, более быстрого исполнительного органа, так что исключаются конфликты сил при приведении в действие, соответственно, при движении исполнительных органов.
Кроме того, известны архитектуры систем для управления рулями с механической обратной связью, при этом могут использоваться различные типы гидравлических исполнительных органов (такие как, например, EHSA, EHA, EBHA).
В публикации US 2008/203224 А раскрыта интеграция электромеханических исполнительных органов (EMA) в обычных гидравлических системах управления самолета. Раскрываемая при этом проблема относится не специально к конфликту сил при активно-активной работе обеих технологий, а к предотвращению отрицательных свойств ЕМА. В активно-пассивной конфигурации пассивный ЕМА прикладывал бы на основании своей инерции демпфирующую нагрузку к EHSA. Это приводит к напряжениям, соответственно, к скручиванию в механической структуре управления поверхностями, а также к повышенному расходу мощности EHSA и к индукции токов с помощью электродвигателя ЕМА. В активно-активной конфигурации может происходить на основании внешних нагрузок слишком сильная нагрузка ЕМА. На основании обусловленной технологией недостаточной емкости для отвода тепла могут проявляться последствия нагревания или другие сбои. В публикации приведено описание особого, называемого активно-резервным рабочего режима, который реализуется за счет изменяемого ограничения тока внутри электронного управляющего блока электромеханического исполнительного органа (ЕМА). За счет этого достигается, что ЕМА следует за установочным движением рулевой поверхности, однако вносит небольшой вклад в ее позиционирование (управляющую силу). Лишь в случае больших внешних нагрузок провал работоспособности активного EHSA приводил бы к неправильному позиционированию. Затем происходило бы повышение ограничения тока внутри силового блока в ЕМА, так что он кратковременно может оказывать поддержку.
В известных из уровня техники устройствах недостаток состоит в том, что при этом достигается лишь статическое выравнивание управляющих сил. Динамические конфликты сил, которые возникают во время процесса управления, не рассматриваются. В частности, при больших/дискретных отклонениях рулевых поверхностей это, однако, является в гибридных конфигурациях преобладающим эффектом. Подходящая реализация внутри реальных систем управления самолета концепции предварительного управления не следует из уровня техники.
Поэтому задачей изобретения является создание системы управления исполнительными органами, которая справляется с конфликтами сил/статическими конфликтами сил, соответственно, минимизирует их.
Статические конфликты сил определяются по существу допусками и неточностями внутри позиционирования исполнительных органов между собой. Так, например, ошибки в позиционировании (LVDT) приводят к ошибочному позиционированию между собой. В зависимости от обычно пропорционального регулировочного усиления возникает постоянная сила, с помощью которой исполнительные органы стремятся противоположно друг другу переместиться в свое соответствующее измеренное положение. Поэтому из уровня техники известно осуществление расположенного параллельно позиционированию регулирования разностной силы посредством обратной связи с управляющей командой. Наряду с этим методом, можно предотвращать, соответственно, компенсировать ошибки позиционирования также за счет изготовления конструктивных элементов, их установки и за счет технического обслуживания.
Однако указанные выше причины статических конфликтов сил относятся к тем конфигурациям исполнительных органов, в которых множество устройств работают в активном режиме. В противоположность этому, в активно-пассивных конфигурациях может не происходить активного действия исполнительных органов противоположно друг другу. Тем не менее, пассивный исполнительный орган за счет своей характеристики демпфирования прикладывает к активному исполнительному органу нагрузку, которая в зависимости от скорости управления может иметь тот же порядок величины.
Для обеспечения возможности надежной и эффективной работы гибридных конфигураций исполнительных органов, в представленном ниже подходе делается различие между динамическими конфликтами сил, которые возникают на основании характеристических свойств исполнительных органов, и вызванными ошибками позиционирования статическими конфликтами сил. Таким образом, обеспечивается целенаправленное приближение к обеим причинам. За счет этого обеспечивается оптимальное разделение мощности исполнительных органов одной рулевой поверхности между собой.
Лежащая в основе изобретения задача решается с помощью системы управления исполнительными органами с признаками пункта 1 формулы изобретения.
Система управления исполнительными органами содержит по меньшей мере один блок предварительного управления, который предназначен для компенсации собственных характеристик по меньшей мере одного из исполнительных органов, и по меньшей мере один регулятор разностной силы, который предназначен для выравнивания остающихся отклонений регулирования в управляющей силе. Кроме того, изобретение относится к летательному аппарату с соответствующей системой управления исполнительными органами и к соответствующему способу.
Регулятор разностной силы может быть, например, пропорционального (Р), интегрального (I) типа или комбинацией с дифференциальной долей (PID).
Предпочтительные варианты выполнения являются предметом зависимых пунктов формулы изобретения.
Летательный аппарат является, в частности, самолетом.
Различные технологии исполнительных органов могут относиться, например, к гидравлическим, электрогидравлическим, электрическим приводам, любым гибридным приводам или другим приводным технологиям. Остающиеся отклонения регулирования относятся к отклонениям, которые не могут быть минимизированы или не достаточно минимизированы с помощью предварительного управления. При этом отклонения могут быть отклонениями между управляющими сигналами и/или сигналами позиционирования различных исполнительных органов. Кроме того, эти отклонения могут соответствовать различиям, соответственно, отклонениям между создаваемыми исполнительными органами управляющими силами.
Понятие управляющая сила в данном случае следует понимать широко, и может охватывать параметры, такие как положение, скорость и/или ускорение исполнительных органов, соответственно, соответствующих рулевых поверхностей, которые могут иметь непосредственное влияние на управляющую силу.
В одном предпочтительном варианте выполнения возможно, что система управления исполнительными органами предназначена для управления точно одной рулевой поверхностью. Под этим понимается, что с помощью системы управления исполнительными органами можно управлять несколькими, соответственно, по меньшей мере двумя исполнительными органами одной единственной рулевой поверхности. При этом летательный аппарат может иметь, естественно, больше одной единственной рулевой поверхности, которыми всеми или частично можно управлять с помощью системы управления исполнительными органами, согласно изобретению. Понятие управление в данном случае не следует понимать ограниченно, и оно содержит также обстоятельства, при которых стадии регулирования могут предприниматься дополнительно или альтернативно стадиям управления.
В одному другом предпочтительном варианте выполнения возможно, что блок предварительного управления предназначен для придания исполнительным органам общих и, в частности, оптимальных моделированных характеристик. Под приданием моделированных характеристик понимается в данном случае управление/регулирование исполнительных органов, которое можно вычислять с учетом свойств, соответственно, характеристик, в частности, всех участвующих исполнительных органов. За счет придания соответствующих моделированных характеристик может обеспечиваться, что ни один исполнительный орган не выполняет за счет управления движения, которые он может выполнять, например, только медленней, чем другой исполнительный орган. Поскольку оба исполнительных органа связаны друг с другом с помощью рулевой поверхности, то поэтому в противном случае могут происходить конфликты сил.
Моделированные характеристики могут быть в одном особенно предпочтительном варианте выполнения рассчитаны посредством вычисления инвертируемых передаточных функций из линеаризованных дифференциальных уравнений, при этом дифференциальные уравнения описывают систему исполнительных органов.
В частности, возможно, что общие моделированные характеристики соответствуют характеристикам наиболее слабого исполнительного органа, соответственно, учитывают их, и/или что моделированные характеристики соответствуют модели, которая содержит непрерывную траекторию, которая не пренижает заданную в спецификации системы производительность. Слабейшим исполнительным органом может быть, например, наименее мощный и/или наиболее медленный исполнительный орган, и/или наиболее медленно реагирующий исполнительный орган. За счет этого может обеспечиваться, что более быстрые исполнительные органы не приводятся с помощью управления/регулирования также более быстро в действие, чем более медленные исполнительные органы, и при этом конфликты сил вызываются уже при управлении исполнительными органами.
Понятие система может в данном случае охватывать исполнительные органы, рулевые поверхности и/или управляющую электронику, а также, возможно, выполняемые вычисления.
В одном другом предпочтительном варианте выполнения возможно, что предусмотрено ограничение, которое предназначено для ограничения вклада регулятора разностной силы в общий поток управления. При этом ограничение может содержать механический компонент и/или, например, вызываться программированием управления исполнительным органом. Под вкладом регулятора разностной силы в общий поток управления может пониматься, что влияние регулятора разностной силы на управляющие сигналы, соответственно, на положение, скорость и/или ускорение рулевой поверхности, соответственно, исполнительного органа или исполнительных органов по сравнению с влиянием предварительного управления на указанные параметры может быть ограничено.
В одном другом предпочтительном варианте выполнения возможно, что предварительное управление является детерминированным и, в частности, контролируемым посредством сравнения с репликатом, и/или является однозначным для каждого канала. Понятие канал может обозначать в большинстве случаев часть системы управления исполнительными органами, которая служит для управления одним единственным исполнительным органом.
Кроме того, изобретение относится к летательному аппарату, в частности самолету, содержащему по меньшей мере одну систему управления исполнительными органами по любому из пп.1-7 формулы изобретения, при этом летательный аппарат содержит по меньшей мере одну рулевую поверхность и по меньшей мере два соединенных с рулевой поверхностью исполнительных органа. Система управления исполнительными органами и тем самым летательный аппарат могут содержать, естественно, также другие или все признаки, которые названы в связи с системой управления исполнительными органами. Поэтому можно отказаться от повтора.
Кроме того, изобретение относится также к способу управления по меньшей мере двумя основанными на различных технологиях исполнительными органами рулевой поверхности летательного аппарата, в частности самолета, который содержит стадии:
регулирования/управления исполнительными органами для придания общих моделированных характеристик; и
выравнивания отклонений регулирования с помощью регулятора разностной силы.
Регулятор может быть выполнен, например, в виде PID-регулятора, в виде I-регулятора или в виде Р-регулятора.
Кроме того, в особенно предпочтительном варианте выполнения способ может содержать вычисление инвертируемых передаточных функций из линеаризованных дифференциальных уравнений для определения, соответственно, расчета моделированных характеристик.
Другие подробности и преимущества изобретения поясняются ниже на основании примеров выполнения со ссылками на прилагаемые чертежи, на которых изображено:
фиг.1 - пример выполнения системы управления исполнительными органами с тремя различными исполнительными органами;
фиг.2 - схема потока сигналов концепции предварительного управления, согласно изобретению;
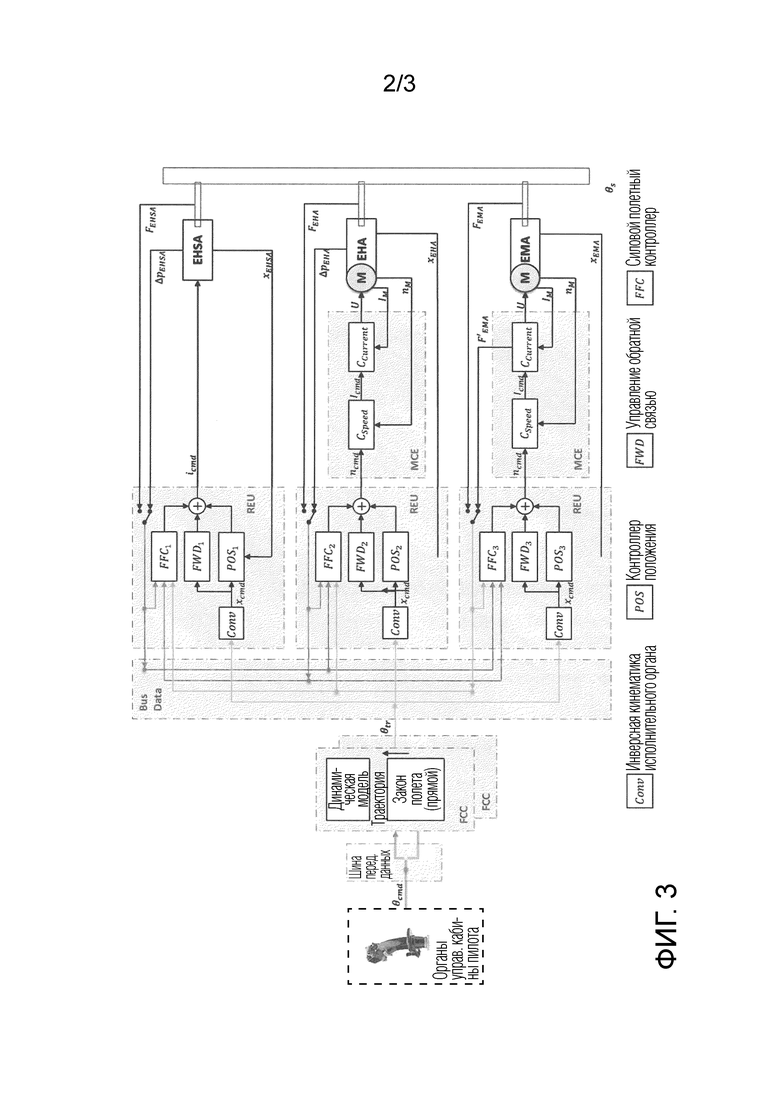
фиг.3 - функциональное распределение концепции регулирования внутри архитектуры летательного аппарата; и
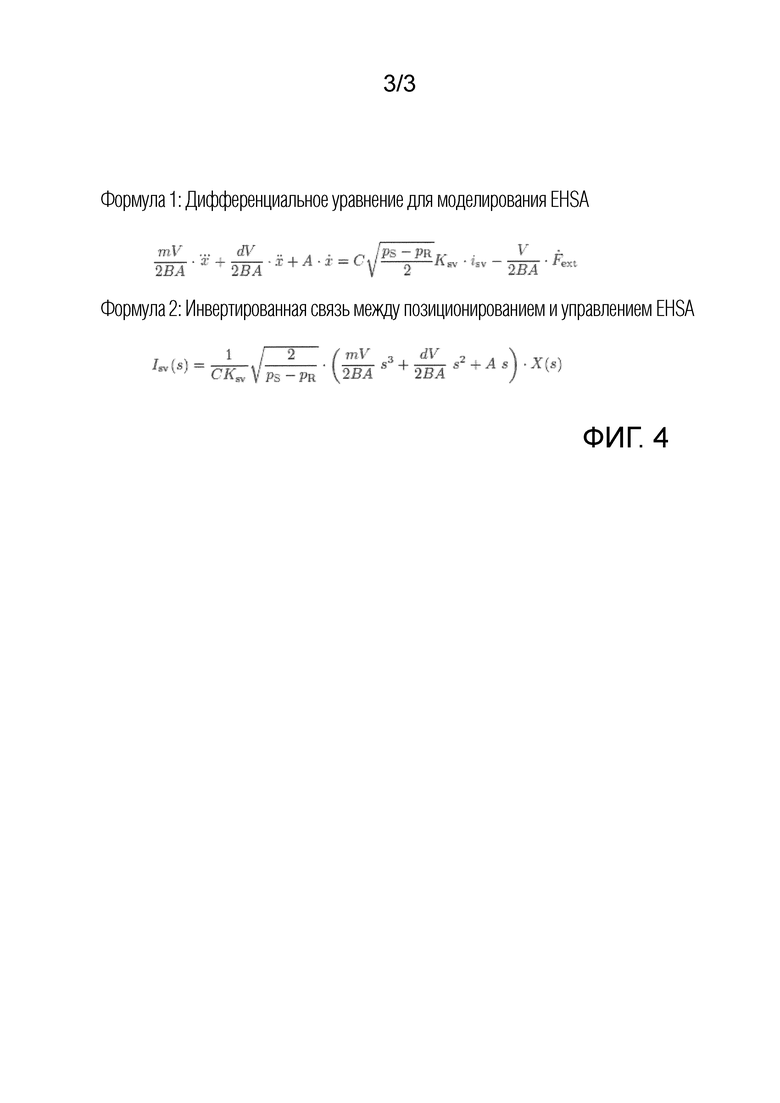
фиг.4 - формулы для выполнения управления исполнительными органами.
На фиг.1 схематично показана управляющая система исполнительными органами, согласно изобретению, для управления по меньшей мере двумя основанными на различных технологиях исполнительными органами. При этом в показанном на фиг.1 варианте выполнения изображены три различных исполнительных органа (EHSA, EMA и ЕНА). Согласно изобретению, любое количество исполнительных органов любых технологий могут соединяться друг с другом, соответственно, управляться с помощью системы управления исполнительными органами.
Как показано на фиг.1, система управления исполнительными органами может быть соединена с компьютером управления полетом (FCC), соответственно, по меньшей мере частично реализована с его помощью. FCC может быть, в свою очередь, как известно из уровня техники, принимать, соответственно, направлять дальше вводимые пилотом команды управления. Для реализации управления исполнительными органами, в зоне исполнительных органов могут быть предусмотрены электронные блоки управления электродвигателями (МСЕ) и/или соединенные с ними дистанционные электронные блоки (REU). REU могут быть соединены с МСЕ для передачи информации относительно команды скорости (Rate command), RAM LVDT или выбора режима (Mode select). Через шинное соединение между FCC и REU может передаваться информация команды траектории, выбор режима и/или данные состояния REU. С помощью FCC можно, в свою очередь, обрабатывать данные для закона прямого управления, для модели движения вперед и/или для мониторинга/системы.
PID-регулятор и/или блок предварительного управления могут быть реализованы по меньшей мере частично на всех или части показанных на фиг.1 компонентов, в частности, на FCC, REU и/или МСЕ. PID-регулятор выполняет обязанности регулятора разностной силы и представляет собой предпочтительный вариант выполнения.
На фиг.1 показана конкретная реализация концепции системы управления полетом. При этом вид реализации таков, что нет ограничения в комбинации технологий. Поэтому на фиг.1 в качестве примера показана комбинация из EHSA, ЕНА и ЕМА в такой системе управления полетом.
Уменьшаемые, соответственно, преодолеваемые, согласно изобретению, динамические конфликты сил возникают при движении рулевой поверхности на основании собственных характеристик соответствующих применяемых исполнительных органов. В то время как в исполнительном цилиндре EHSA на основании усиления сил имеется в распоряжении непосредственно полное давление системы, его ускорение относительно ЕМА, в котором сначала должна преодолеваться инерция передачи и шпинделя, больше. В противоположность этому, скорость регулирования ЕМА в противоположность EHSA является максимально независимой от внешней нагрузки. Лишь за счет ограничения тока электродвигателя внутри электронного блока управления электродвигателем его скорость вращения падает при максимальной нагрузке. В противоположность этому, в EHSA пропускная способность сервоклапана и тем самым скорость регулирования определяется имеющимся в распоряжении потенциалом давлением. В случае внешней нагрузки увеличивается разница давления в исполнительном цилиндре, за счет чего уменьшается пропускная способность.
На основании этого для предотвращения динамических конфликтов сил требуется в зависимости от состояния системы (например, внешней нагрузки) знать наиболее слабое звено системы, которое во время каждого процесса управления действует тормозящим образом. Когда, как предусмотрено согласно изобретению, все участвующие исполнительные органы имеют именно эту характеристику управления, то могут предотвращаться конфликты сил.
В соответствии с фиг.2, сначала предпринимается попытка, согласно изобретению, компенсации собственных характеристик системы (исполнительного органа или наиболее слабого исполнительного органа, соответственно, органов). Для этого система детально описывается с помощью дифференциальных уравнений (см. формулу 1 на фиг.4). Затем они подвергаются линеаризации, с целью получения инвертируемых передаточных функций (см. формулу 2 на фиг.4). За счет этого можно получать обозначенную на фиг.2 как «компенсация обратной связи» (Feed-Forward compensation) взаимосвязь между траекторией Х, которую выполняет исполнительный орган, и требуемым для этого управляющим током ISV. Тем самым обеспечивается возможность управления каждым исполнительным органом так, что он следует за обозначенными как «опорная динамика» моделированными характеристиками.
Поскольку теперь каждая физическая система подвержена определенной инерции, то на следующей стадии необходимо найти моделированные характеристики, которые учитывают максимальную производительность данной системы. Это можно осуществлять, с одной стороны, за счет реализации модели названного перед этим слабейшего звена в системе. С другой стороны, можно в данном случае применять любую модель, которая вычисляет непрерывную траекторию, которая не пренижает заданную в спецификации системы производительность.
Поскольку указанная концепция основывается на упрощении уравнений модели, то физические исполнительные органы будут иметь отклонения в своем позиционировании, несмотря на предварительное управление опорными характеристиками. Эти отклонения компенсируются с помощью, в частности, параллельного регулятора положения (контроллера) посредством его ограниченного в авторитете вклада в общий поток управления.
На фиг.3 схематично показана, как может быть реализована указанная концепция предварительного управления для показанной в качестве примера на фиг.1 конфигурации из EHSA, ЕМА и ЕНА. На фиг.3 показана архитектура системы и распределение функций предварительного управления/регулирования на отдельные устройства (FCC, REU), а также их связи друг с другом. Детали регулирования/управления, согласно изобретению, в частности, выполнения REU, а также передачи сигналов между FCC и различными REU через шинное соединение, могут осуществляться частично или полностью, как в показанном на фиг.3 примере.
Поясненная концепция обеспечивает возможность разделения системы управления исполнительными органами, согласно изобретению, на путь предварительного управления и на путь регулятора разностной силы, соответственно, на блок предварительного управления и PID-регулятор. Предварительное управление образует основную часть команды управления, в то время как регулятор силы ограничен в своем авторитете (влиянии).
Предварительное управление является детерминированным, и поэтому его можно контролировать посредством сравнения с репликатом (монитором). Оно является однозначным для каждого канала, и отсутствует какая-либо взаимосвязь. За счет этого обеспечивается желаемая независимость каналов, что обеспечивает максимально возможную доступность.
Влияние остающейся зависимости каналов за счет вычисления разностной силы внутри соответствующего регулятора силы минимизируется по сравнению с обычными подходами, которые основываются исключительно на регулировании силы. За счет этого улучшается возможность контролирования системы по сравнению с другими концепциями.
Это обеспечивает возможность при необходимости, в случае неисправности, полное разделение каналов (выключение обратной связи по силе), которое сопровождается не существенным уменьшением эффективности.
Новым в этом подходе является применение предварительного управления в комбинации с регулятором разностной силы для управления рулевой поверхностью самолета, а также архитектура системы для реализации этой концепции регулирования.
Аналогично вычислению команды управления в соответствии с законом управления полетом, компьютер управления полетом (FCC) выполняет в данном случае непрерывное вычисление оптимальных моделированных характеристик для соответствующей рулевой поверхности. Эти характеристики отличаются динамическим профилем движения (траекторией), состоящим из сигналов положения, скорости и ускорения в зависимости от времени, который передается в подчиненные электронные блоки позиционирования (REU). Каждый REU образует вместе с согласованным с ним исполнительным органом отдельный канал управления, и/или может содержать PID-регулятор. На нем замыкается контур регулирования положения, и компенсируются соответствующие собственные характеристики исполнительного органа, при этом каждому отдельному исполнительному органу придаются задаваемые FCC моделированные характеристики. Эти поясненные функции выполняются независимо, т.е. без связи или лишь с частичной связью между отдельными REU. Такая обусловленная архитектурой независимость особенно предпочтительна относительно возможности сертификации для первичного управления самолетом.
Предусмотренный дополнительно регулятор разностной силы обеспечивает возможность дальнейшего улучшения характеристик конфликта сил. Для этого приходится мириться с небольшим нарушением независимости. По сравнению с другими решениями, за счет комбинации с предварительным управлением необходимо лишь небольшое влияние для регулирования, за счет чего минимизируется влияние зависимо создаваемой доли команды.

Группа изобретений относится к управляющей системе для управления исполнительными органами летательного аппарата, летательному аппарату, содержащему такую систему, способу управления исполнительными органами рулевой поверхности летательного аппарата. Система содержит по меньшей мере один блок предварительного управления, регулятор разностной силы. Летательный аппарат содержит по меньшей мере одну рулевую поверхность и два соединенных с рулевой поверхностью исполнительных органа. Для осуществления способа производят регулирование/управление исполнительными органами для придания общих моделированных характеристик и выравнивание отклонений регулирования с помощью регулятора разностной силы. Обеспечивается оптимальное разделение мощности исполнительных органов одной рулевой поверхности между собой. 3 н. и 8 з.п. ф-лы, 4 ил.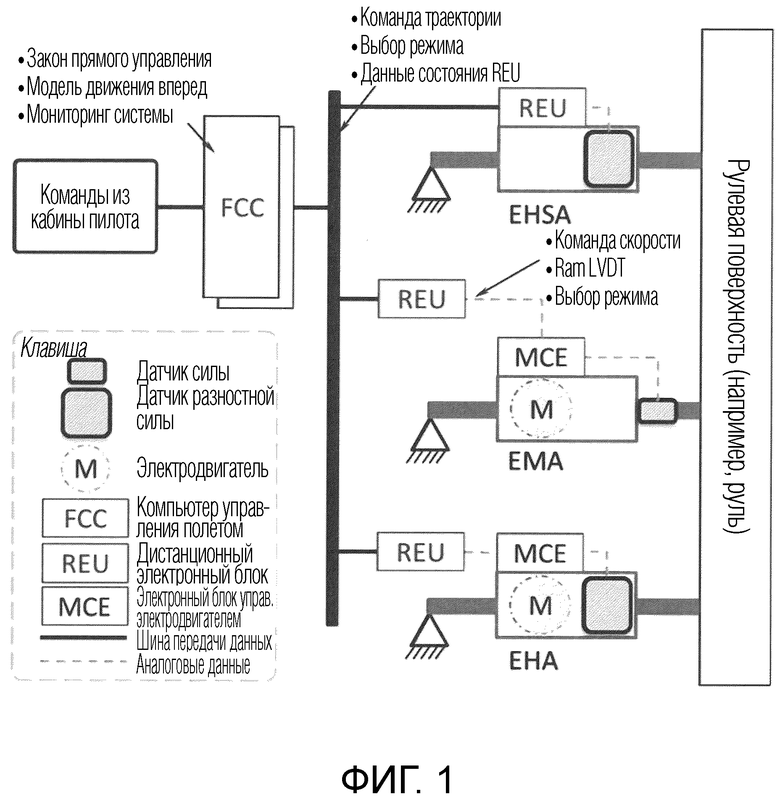
1. Управляющая система для управления по меньшей мере двумя основанными на различных технологиях исполнительными органами, например, рулевой поверхности летательного аппарата, в частности самолета, содержащая по меньшей мере один блок предварительного управления, который предназначен для компенсации собственных характеристик по меньшей мере одного из исполнительных органов, и по меньшей мере один регулятор разностной силы, который предназначен для выравнивания остающихся отклонений регулирования в управляющей силе.
2. Управляющая система по п.1, отличающаяся тем, что она предназначена для управления только одной рулевой поверхностью.
3. Управляющая система по п.1 или 2, отличающаяся тем, что блок предварительного управления предназначен для придания исполнительным органам общих и, в частности, оптимальных моделированных характеристик.
4. Управляющая система по п.3, отличающаяся тем, что моделированные характеристики рассчитаны посредством вычисления инвертируемых передаточных функций из линеаризованных дифференциальных уравнений, при этом дифференциальные уравнения описывают систему исполнительных органов.
5. Управляющая система по п.3 или 4, отличающаяся тем, что общие моделированные характеристики соответствуют характеристикам наиболее слабого исполнительного органа, и/или что моделированные характеристики соответствуют модели, которая содержит непрерывную траекторию, которая не принижает заданную в спецификации системы производительность.
6. Управляющая система по любому из пп.1-5, отличающаяся тем, что предусмотрено ограничение, которое предназначено для ограничения вклада регулятора разностной силы в общий поток управления.
7. Управляющая система по любому из пп.1-6, отличающаяся тем, что предварительное управление является детерминированным и, в частности, контролируется посредством сравнения с репликатом и/или является однозначным для каждого канала.
8. Летательный аппарат, в частности самолет, содержащий по меньшей мере одну систему управления исполнительными органами по любому из пп.1-7, при этом летательный аппарат содержит по меньшей мере одну рулевую поверхность и по меньшей мере два соединенных с рулевой поверхностью исполнительных органа.
9. Способ управления по меньшей мере двумя основанными на различных технологиях исполнительными органами рулевой поверхности летательного аппарата, в частности самолета, который содержит стадии:
регулирования/управления исполнительными органами для придания общих моделированных характеристик; и
выравнивания отклонений регулирования с помощью регулятора разностной силы.
10. Способ по п.9, отличающийся тем, что вычисление моделированных характеристик содержит вычисление инвертируемых передаточных функций из линеаризованных дифференциальных уравнений.
11. Способ по п.9 или 10, отличающийся тем, что способ выполняется с помощью управляющей системы по любому из пп.1-7.
| СПОСОБ ВЫСОКОТОЧНОГО И ДИНАМИЧНОГО УПРАВЛЕНИЯ ТРАЕКТОРИЕЙ ДВИЖЕНИЯ ПОДВИЖНОГО ОБЪЕКТА (МОРСКИЕ И РЕЧНЫЕ СУДА, ЛЕТАТЕЛЬНЫЕ АППАРАТЫ, УПРАВЛЯЕМЫЕ РАКЕТЫ) | 2009 |
|
RU2403610C1 |
| Устройство для загрузки в газогенератор дров и других кусковых топлив | 1946 |
|
SU68145A1 |
| RU 2011120142 A, 27.11.2012 | |||
| US 20140081505 A1, 20.03.2014 | |||
| US 0009310222 B1, 12.04.2016. | |||

