Область техники, к которой относится изобретение
Данная группа изобретений относится к системам для вычисления параметров геометрического положения колес транспортных средств по данным трехмерного сканирования поверхностей колес и рамы. По одному варианту трехмерное сканирование поверхностей колес и рамы осуществляется бесконтактным методом, с помощью блоков трехмерного сканирования и отображаемых на транспортном средстве световых элементов, при котором на его колеса и раму проецируют ряд световых элементов, снимают подсвеченные колеса, а также раму и передают полученные изображения на вычислительное устройство, которое осуществляет расчет необходимых параметров. По второму варианту система сканирования рамы транспортных средств отличается типом используемых блоков трехмерного сканирования, которые определяют пространственное положение специальных меток с градиентным рисунком или голографических меток, устанавливаемых на раму транспортного средства.
Блок трехмерного сканирования колес - любое устройство, которое может проецировать изображение и сканировать его в объеме точки или множества точек проецируемого изображения. Блок трехмерного сканирования колес может состоять из модуля проецирования - то есть из любого устройства, излучающего свет по заданным параметрам, типичный представитель - проектор, и модуля сканирования - любого устройства, которое может получить изображение. Например, по крайней мере, одна видеокамера. Предпочтительное исполнение - стереопара видеокамер. Вместо видеокамеры и проектора могут применяться другие средства получения поверхности колеса, включая различные триангуляционные системы, сканирующие лазерные дальномеры, LIDAR, TOF камеры, и т.д.
Блок трехмерного сканирования рамы - любое устройство, которое может сканировать поверхности, на которых расположены специальные метки с изображением геометрических фигур, штрих кодов, голографические, световые. Блок трехмерного сканирования рамы состоит из модуля сканирования - любого устройства, которое может получить изображение и обработать его и/или передать на вычислительное устройство. Например, это может быть, по крайней мере, одна видеокамера с встроенной подсветкой и процессорным модулем. Предпочтительное исполнение - стереопара вышеуказанных видеокамер.
Модуль проецирования световых меток - любое устройство излучающего свет по заданным параметрам, которое может проецировать на целевую поверхность изображение в виде точки, линии, множества точек, линий, световых пятен произвольной формы. Типичный представитель - проектор структурированного света, излучатель линии или точек.
ТС - транспортное средство.
Взаимная калибровка - информация о взаимном пространственном расположении блоков, устройств или деталей.
Ключевые параметры геометрического положения колес - это пространственное положение центра колеса, вектор оси его вращения, а также углы вращения, поворота и вектор оси поворота колеса.
Ключевые параметры измерения - углы установки колес, такие как схождение, развал, продольный наклон, линия движения (тяги), угол движения (тяги), угол между двумя соседними осями.
УУК - углы установки колес.
Ключевые параметры геометрического положения рамы - это положение продольных швеллеров рамы в глобальной системе координат, связанной с измерительной системой, и проекция центральной линии рамы на базовую плоскость основания зоны измерений, в которой располагается измерительная система
Уровень техники способа.
Для колес транспортных средств, расположенных слева и справа от продольной линии ТС, ключевые параметры рассчитываются относительно его базовой линии движения, которая определяется задними колесами и в результате регулировки, должна совпадать либо с центральной геометрической линией ТС, либо с центральной линией его рамы. Положение центральной геометрической линии транспортного средства в пространстве определяется исходя из положений его колес и не всегда совпадает с центральной линией рамы из-за качества сборки или деформаций в процессе эксплуатации.
Регулировка углов установки колес многоосных ТС является особенно важной процедурой как с точки зрения экономической составляющей, поскольку предотвращается ускоренный износ шин, экономится топливо, так и с точки зрения безопасности дорожного движения, так как улучшается управляемость, минимизируется динамический коридор, который занимает ТС при движении.
Особенность регулировки УУК многоосных ТС, состоит в выборе базовой линии для регулировки. Для ТС большой длины важно, чтобы во время прямолинейного движения, ширина полосы дорожного движения, занимаемая ТС, совпадала с его габаритной шириной. В случае регулировки относительно линии движения, которая определяется задними колесами, ТС может перемещаться боком, что приводит к увеличению занимаемого пространства на дороге и расхода топлива. Оптимальные параметры обеспечиваются при выборе в качестве базовой линии либо геометрической центральной линией ТС, либо его центральной линии рамы. Положение центральной геометрической линии ТС в пространстве определяется исходя из положений колес ТС, поэтому такой способ регулировки не предполагает использование дополнительных средств измерений. Для определения геометрического положения центральной линии рамы, как правило, необходимы сложные дополнительные механические приспособления, которые устанавливаются на раму ТС.
Существуют решения для измерения многоосных транспортных средств относительно рамы, как например в заявке на патент США US 20140253909A1, принцип работы которых основан на измерениях с помощью видеокамер и мишеней, которые устанавливаются на колесах и раму ТС.
В известных на рынке устройствах ТехноВектор 7, производства ООО «Технокар» (см. ссылку в интернете www.technovector.ru) модификации для грузовых автомобилей был реализован простой способ измерения центральной линии рамы с помощью механического или лазерного щупа с референтной мишенью. Суть способа состоит в том, что с помощью щупа определяются по крайней мере по две точки в пространстве через которые проходит продольное направление рамы по левой и правой стороне ТС. По проекциям этих точек в горизонтальной плоскости определяется центральная линия рамы ТС.
Существуют бесконтактные решения, см. заявку на патент на изобретение WO 2009056392 A1, которые обеспечивают измерение УУК ТС с помощью передвижных устройств, которые поочередно перемещаются напротив каждого колеса. Перемещение модулей со сканирующими устройствами относительно ТС влечет за собой увеличения сложности механической и электрической систем из-за необходимости в приводных и направляющих системах и системах автоматизации, создавая проблемы безопасности из-за движущихся частей. Измерение многоосных ТС с помощью таких устройств занимает много времени, а для отслеживания изменений во время регулировки необходимы дополнительные конструктивные решения, обеспечивающие одновременное определение положения колес и осей в пространстве относительно рамы.
Другой бесконтактный способ и устройство представлены в патенте EP 2069714 B1. Устройство основываются на двух бесконтактных измерительных блоках, измерительные модули которых, установлены друг напротив друга по обеим сторонам ТС. Измерение параметров колес производится по отдельности поочередно для каждой оси ТС с двумя и более осями. Недостатком данной системы является то, что реализуемый им способ измерения использует в качестве объекта сканирования колесные диски. Способ может давать ошибку при отклонении размеров колесных дисков от идеальных из-за их деформации, а также из-за его чувствительности к форме, цвету и отражающей способности поверхности дисков, что может приводить к недостаточной точности измерения. Также в данном способе измерение параметров колес и осей строится на допущении, что ТС перемещается прямолинейно во время поочередного измерения каждой отдельной оси, что практически неосуществимо и соответственно может приводить к ошибочным результатам.
В заявке на патент на изобретение WO 2015186150 (A1) представлены бесконтактные системы для измерения параметров колес ТС на базе времяпролетных (TOF) датчиков. Практическое применения таких систем в настоящее время ограничено из-за недостаточной точности представленных на рынке датчиков.
В патенте на изобретение EP 2769177 B1 представлены бесконтактные устройства на базе 3D-сканеров, расположенных по обеим сторонам ТС и направленных на его колеса, причем предполагается использование по меньшей мере одной камеры каждого 3D-сканера для отслеживания взаимного положения сканеров при помощи механически связанных с ними мишеней. Рабочее расстояние от камеры до измеряемого колеса может в несколько раз отличаться от расстояния до мишеней, расположенных на других 3D-сканерах. Это может вносить погрешность измерения в несколько раз превышающую погрешность, возникающую при использовании специализированной камеры с подходящим фокусным расстоянием и настроенной на определенное расстояние. Заявленные в данном патенте изменения относительного положения стационарно расположенных 3D-сканеров на практике приводят к слишком малым отклонениям. Действительная необходимость отслеживания относительного положения 3D-сканеров возникает, только когда измерительное устройство, содержащее 3D-сканер, является перемещаемым. Кроме того, представленные устройства сконфигурированы для измерения параметров колес и осей ТС и не позволяют производить оценку положения осей относительно линии рамы, что ограничивает их практическое применение для грузовых ТС.
В патенте EP2619527B1 представлена система для измерения рамы, которая содержит видеокамеру, устанавливаемую на уровне пола, по оси ТС позади его, а также механическое приспособление с мишенями-отражателями, которое устанавливается поочередно в разных местах по длине рамы ТС. Основным недостатком этой системы является трудоемкость процесса установки механического приспособления с мишенями к раме ТС и низкая скорость измерения.
Многоосные ТС обладают большим разнообразием конфигураций осей и размеров колесных баз, а также габаритных размеров рам. Соответственно требуются гибкие решения, которые обеспечивают максимальное удобства работы и скорость измерений, без контакта с колесами или другими элементами конструкции ТС.
Любой указанный выше уровень техники может быть прототипом предлагаемой группы изобретений. Все они имеют недостаток - невысокая скорость измерения, невозможность одновременного сканирования колес ТС и его рамы.
Раскрытие изобретения по первому варианту.
Опирающееся на это оригинальное наблюдение настоящее изобретение, главным образом, имеет целью предложить систему для вычисления параметров геометрического положения колес транспортных средств по данным трехмерного сканирования поверхностей их колес и рамы, позволяющую, по меньшей мере, сгладить, как минимум, один из указанных выше недостатков, а именно возможность повысить скорость измерения, получить возможность одновременного сканирования колес ТС и его рамы, обеспечить измерение ключевых параметров колес и осей относительно линии рамы, для ТС с различной конфигурацией осей, в рамках одной зоны измерений, что и является поставленной задачей.
Для достижения этой цели система для бесконтактного измерения и регулировки углов установки колес ТС относительно рамы транспортного средства характеризуется, по существу, тем, что она включает в себя: вычислительное устройство с устройствами ввода/вывода, отображения, распечатки, приема и передачи информации, связанное с
двумя блоками трехмерного сканирования колес транспортного средства, расположенными в двух колоннах по одному в каждой колонне, а также с
четырьмя блоками трехмерного сканирования рамы транспортного средства, расположенными по два с двух сторон относительно каждой колонны с блоками трехмерного сканирования колес, в направлении продольной центральной линии площадки для измерений, жестко связанными с корпусом каждой колонны с блоком трехмерного сканирования колес, и выполненными с возможностью сканирования, по крайней мере одной метки, расположенной на раме транспортного средства, причем
колонны расположены по левой и правой сторонам транспортного средства, симметрично относительно продольной центральной вертикальной плоскости площадки для измерений транспортного средства, на расстоянии 3000-6000 мм друг относительно друга, при этом
блоки трехмерного сканирования колес и рамы в каждой колонне, направлены в сторону колес и рамы транспортного средства, перпендикулярно к продольной центральной вертикальной плоскости площадки для измерений, а
блоки трехмерного сканирования колес и рамы взаимно откалиброваны
Благодаря данным выгодным характеристикам, за счет того, что блоки трехмерного сканирования колес и блоки трехмерного сканирования рамы жестко связаны и взаимно откалиброваны, обеспечивается одновременное измерение ключевых параметров колес по каждой оси ТС относительно линией рамы.
Существует вариант исполнения данной системы, при котором в блоках трехмерного сканирования рамы, установлены дополнительные модули проецирования световых меток на раму ТС.
Благодаря данным выгодным характеристикам появляется возможность производить измерение без физической установки специальных меток на поверхность рамы, что облегчает и ускоряет процесс измерения.
Раскрытие изобретения по второму варианту.
Другой вариант системы для бесконтактного измерения и регулировки углов установки колес транспортных средств относительно рамы, в которой содержатся
вычислительное устройство с устройствами ввода/вывода, отображения, распечатки, приема и передачи информации, отличается тем, что вычислительное устройство соединено с
по крайней мере, двумя блоками трехмерного сканирования колес, расположенными в двух колоннах, а также с
с двумя блоками трехмерного сканирования рамы, расположенными в напольном измерительном модуле и выполненными с возможностью сканирования по крайней мере, одной метки, расположенной на раме транспортного средства, причем
колонны расположены по левой и правой сторонам транспортного средства, симметрично относительно продольной центральной вертикальной плоскости площадки для измерений транспортного средства, на расстоянии 3000-6000 мм друг относительно друга, при этом,
блоки трехмерного сканирования колес в каждой колонне, направлены в сторону колес транспортного средства, перпендикулярно к продольной центральной вертикальной плоскости площадки для измерений,
напольный измерительный модуль расположен на линии между колоннами, посередине, на пересечении этой линии с продольной центральной вертикальной плоскостью площадки для измерений, на уровне пола или в ремонтном канале, причем
один блок трехмерного сканирования рамы, напольного измерительного модуля, направлен под углом вверх вдоль направления движения транспортного средства, а второй, против его направления движения
блоки трехмерного сканирования колес, расположенные в колоннах и блоки трехмерного сканирования рамы напольного измерительного модуля, взаимно откалиброваны.
Благодаря данным выгодным характеристикам появляется возможность уменьшить габариты колонн с блоками трехмерного сканирования колес и компактно разместить блоки трехмерного сканирования рамы на уровне пола или в ремонтном канале.
Существует вариант исполнения данной системы, при котором в каждом из вышеуказанных блоках трехмерного сканирования рамы, установлены дополнительные модули проецирования световых меток на раму ТС.
Благодаря данным выгодным характеристикам появляется возможность производить измерение без физической установки специальных меток, которых необходимо позиционировать единообразно относительно закраин нижних поверхностей рамы, что облегчает и ускоряет процесс измерения.
Другой вариант системы отличается тем, что дополнительные модули проецирования световых меток на раму ТС, оборудованы программно-управляемыми механизмами поворота в вертикальной плоскости.
Благодаря данным выгодным характеристикам появляется возможность производить более точное измерение рамы, за счет использования более простых проекционных устройств, типа лазерных указок и большего количества точек или линий, проецируемых на нижние поверхности швеллеров рамы.
Возможны дополнения двух вариантов вышеописанных систем. Например, система может содержать множество дополнительных пар колонн с блоками трехмерного сканирования колес, при этом
блоки трехмерного сканирования колес в каждой дополнительной паре колонн направлены в сторону колес транспортного средства, перпендикулярно к продольной центральной вертикальной плоскости площадки для измерений, а
расстояния между отдельными парами колонн с блоками трехмерного сканирования колес в направлении продольной центральной линии площадки для измерений транспортного средства выбраны таким образом, чтобы обеспечивалось частичное перекрытие зон видимости смежных блоков трехмерного сканирования колес в направлении продольной центральной линии площадки для измерений,
все блоки трехмерного сканирования колес взаимно откалиброваны.
количество дополнительных пар колонн с блоками трехмерного сканирования колес определяется, исходя из необходимой длины площадки для измерений и размеров зон видимости блоков трехмерного сканирования колес,
вычислительное устройство выполнено с возможностью объединения всех данных, вычисляемых при помощи блоков трехмерного сканирования колес, обеспечивая, таким образом, одновременное измерение всех колес транспортного средства, находящегося в зоне измерения, вне зависимости от их взаимного расположения и местонахождения в ее пределах.
Благодаря данным выгодным характеристикам появляется возможность производить измерение и регулировку ТС с различной конфигурацией и количеством осей одновременно, в рамках одной площадки для измерений.
Другое дополнение двух вариантов вышеуказанных систем отличается тем, что колонны с блоками трехмерного сканирования колес, содержат дополнительные референтные камеры, взаимно откалиброванные с блоками трехмерного сканирования колес каждой колонны, и направленные вдоль площадки для измерений, а также включены
дополнительные пары колонн с блоками трехмерного сканирования колес, выполненные с возможностью их поворота вокруг своей вертикальной центральной оси на углы в пределах ±20°, содержащие мишени, взаимно откалиброванные с блоками трехмерного сканирования колес и направленные в сторону референтных камер колонн с блоками трехмерного сканирования колес, при этом
блоки трехмерного сканирования колес в каждой дополнительной паре колонн направлены в сторону колес транспортного средства, перпендикулярно к продольной центральной вертикальной плоскости площадки для измерений, а
расстояния между отдельными дополнительными парами колонн с блоками трехмерного сканирования колес в направлении продольной центральной линии площадки для измерений транспортного средства, выбраны таким образом, чтобы обеспечивалось частичное перекрытие зон видимости смежных блоков трехмерного сканирования колес в направлении продольной центральной линии площадки для измерений, с учетом максимальных углов поворота колонн
количество дополнительных пар колонн с блоками трехмерного сканирования колес определяется, исходя из необходимой длины площадки для измерений и размеров зон видимости блоков трехмерного сканирования колес,
вычислительное устройство выполнено с возможностью объединения всех данных, вычисляемых при помощи блоков трехмерного сканирования колес, обеспечивая, таким образом, одновременное измерение всех колес транспортного средства, находящегося в зоне измерения, вне зависимости от их взаимного расположения и местонахождения в ее пределах.
Благодаря данным выгодным характеристикам появляется возможность производить измерение и регулировку ТС с различной конфигурацией и количеством осей одновременно, в рамках одной площадки для измерений, с использованием меньшего количества дополнительных колонн с блоками трехмерного сканирования колес.
Еще одно дополнение двух вариантов вышеуказанных систем отличается тем, что, в систему включены
две дополнительные колонны с блоками трехмерного сканирования колес, содержащие мишени, взаимно откалиброванные с блоками трехмерного сканирования колес и направленные в сторону референтных камер колонн с блоками трехмерного сканирования колес, при этом
дополнительные колонны расположены по левой и правой сторонам транспортного средства, симметрично относительно продольной центральной вертикальной плоскости площадки для измерений, на расстоянии 3000-6000 мм друг относительно друга, и выполнены с возможностью перемещения в направление продольной центральной линии площадки для измерений, при этом
блоки трехмерного сканирования колес в каждой колонне, направлены в сторону колес транспортного средства, перпендикулярно к продольной центральной вертикальной плоскости площадки для измерений
Благодаря данным выгодным характеристикам появляется возможность производить измерение и регулировку ТС с различной конфигурацией и количеством осей одновременно, в рамках одной площадки для измерений, с использованием минимального количества дополнительных колонн с блоками трехмерного сканирования колес.
Краткое описание чертежей
Другие отличительные признаки и преимущества данного изобретения ясно вытекают из описания, приведенного ниже для иллюстрации и не являющегося ограничительным, со ссылками на прилагаемые рисунки, на которых:
- Фигура 1а изображает примерный внешний вид колонн cистемы для бесконтактного измерения и регулировки углов установки колес ТС относительно рамы, с блоками трехмерного сканирования рамы, согласно изобретению по первому его варианту осуществления;
- Фигура 1в изображает примерный внешний вид колонн альтернативной cистемы для бесконтактного измерения и регулировки углов установки колес ТС относительно рамы, с блоками трехмерного сканирования рамы и дополнительными модулями проецирования световых меток на раму ТС, согласно изобретению по первому его варианту осуществления;
- Фигура 2а изображает внешний вид колонн и схему их размещения относительно ТС с установленными специальными метками на раме для cистемы бесконтактного измерения и регулировки углов установки колес ТС относительно рамы, с блоками трехмерного сканирования рамы, согласно изобретению по первому его варианту осуществления;
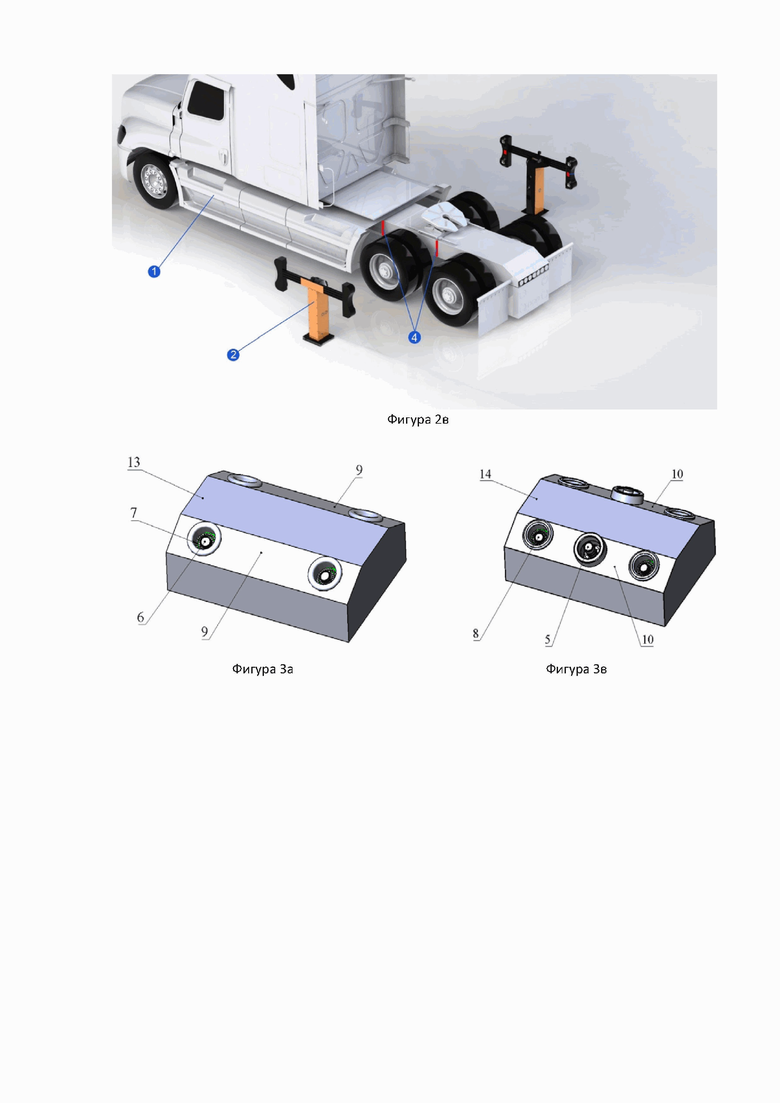
- Фигура 2в изображает внешний вид колонн и схему их размещения относительно ТС для альтернативной cистемы для бесконтактного измерения и регулировки углов установки колес ТС относительно рамы с блоками трехмерного сканирования рамы и дополнительными модулями проецирования световых меток на раму ТС, согласно изобретению по первому его варианту осуществления;
- Фигура 3а изображает примерный вид напольного измерительного модуля с двумя блоками трехмерного сканирования рамы, согласно изобретению по второму его варианту осуществления;
- Фигура 3в изображает примерный вид напольного измерительного модуля с двумя блоками трехмерного сканирования рамы и двумя дополнительными модулями проецирования световых меток на раму ТС, согласно изобретению по второму его варианту осуществления;
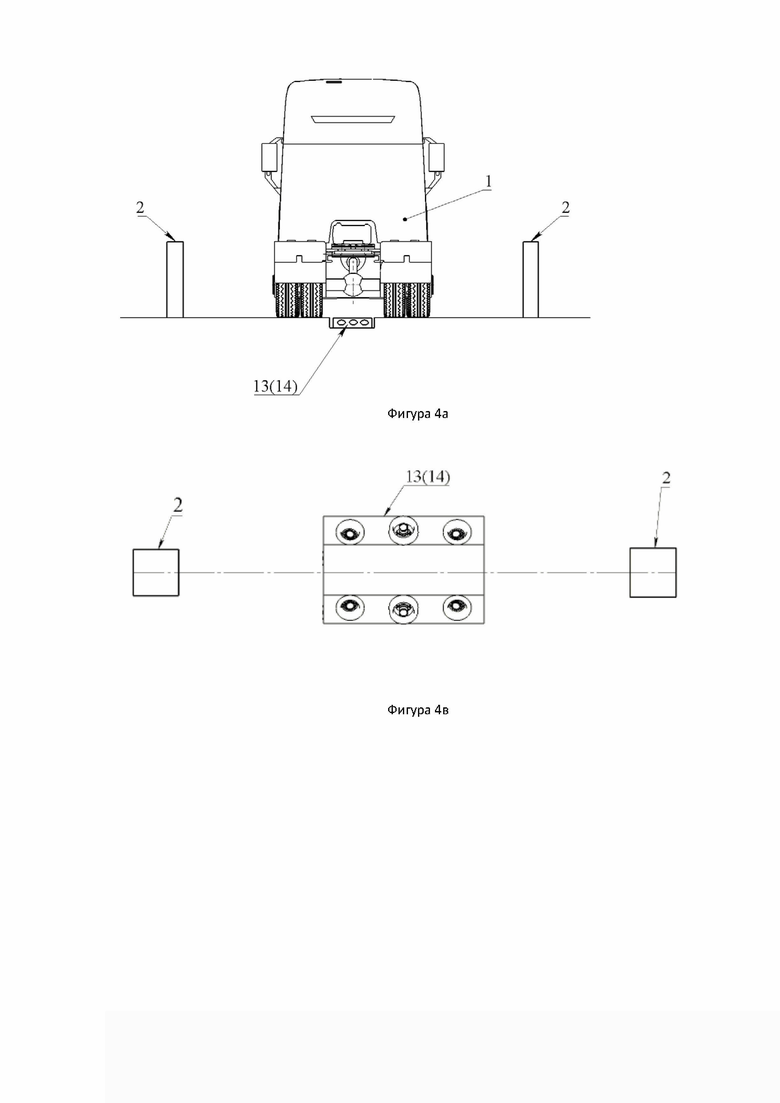
- Фигура 4а изображает схематический вид сзади системы для бесконтактного измерения и регулировки углов установки колес транспортных средств относительно рамы, содержащей, по крайней мере, двух колонн с блоками трехмерного сканирования колес и напольный измерительный модуль с блоками трехмерного сканирования рамы, согласно изобретению по второму его варианту осуществления;
- Фигура 4в изображает схематический вид сверху системы для бесконтактного измерения и регулировки углов установки колес транспортных средств относительно рамы, содержащей, по крайней мере, двух колонн с блоками трехмерного сканирования колес и напольный измерительный модуль с блоками трехмерного сканирования рамы, согласно изобретению по второму его варианту осуществления;
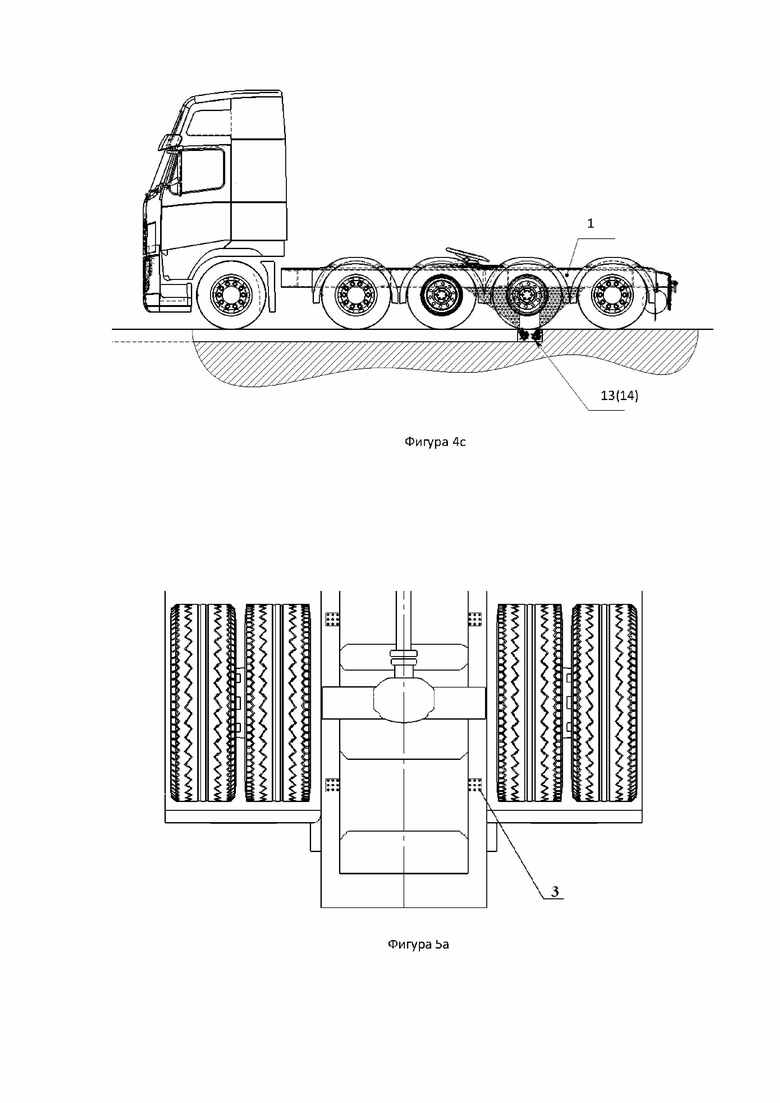
- Фигура 4с изображает схематический вид сбоку системы для бесконтактного измерения и регулировки углов установки колес транспортных средств относительно рамы, содержащей, по крайней мере, двух колонн с блоками трехмерного сканирования колес (не показаны) и напольный измерительный модуль с блоками трехмерного сканирования рамы, согласно изобретению по второму его варианту осуществления;
- Фигура 5а изображает схематический вид снизу ТС с рамной конструкцией, с установленными, по крайней мере, четырьмя специальными метками, расположенными симметрично относительно оси ТС, согласно изобретению
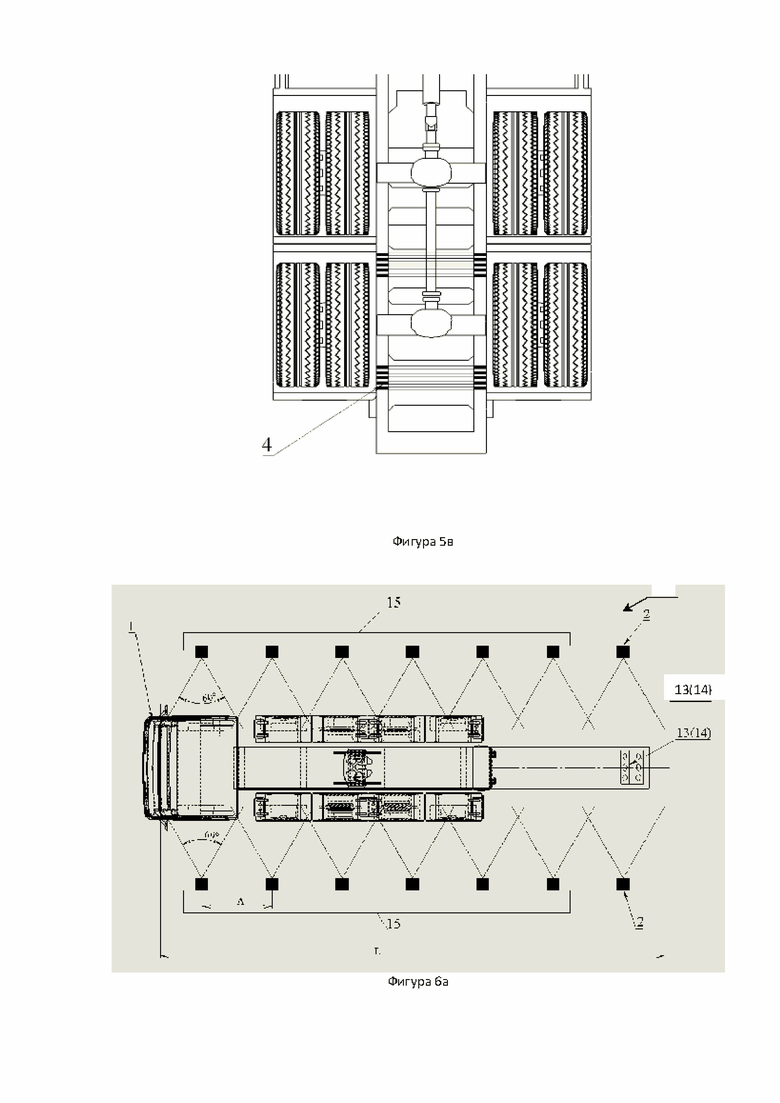
- Фигура 5в изображает схематический вид снизу ТС с рамной конструкцией, с изображенными световыми элементами в виде множества линий в четырех участках рамы, расположенных симметрично относительно оси ТС, согласно изобретению;
- Фигура 6а изображает схематический вид сверху альтернативной cистемы для бесконтактного измерения и регулировки углов установки колес ТС относительно рамы, содержащей множества пар колонн и один напольный измерительный модуль с блоками трехмерного сканирования рамы, согласно изобретению по обоим вариантам;
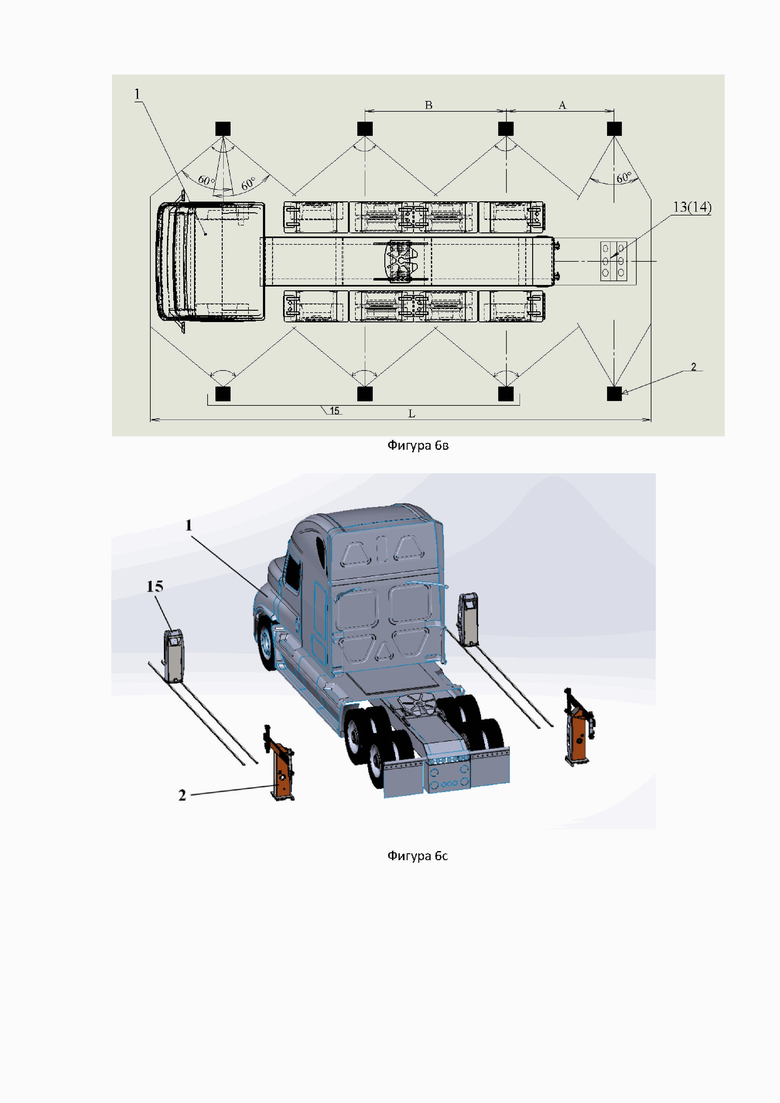
- Фигура 6в изображает схематический вид сверху альтернативной cистемы для бесконтактного измерения и регулировки углов установки колес ТС относительно рамы, содержащей одну пару стационарных и множества пар поворотных колонн с блоками трехмерного сканирования колес и один напольный измерительный модуль с блоками трехмерного сканирования рамы, согласно изобретению по обоим вариантам;
- Фигура 6с изображает схематический вид сверху альтернативной cистемы для бесконтактного измерения и регулировки углов установки колес ТС относительно рамы, содержащей двух колонн с блоками трехмерного сканирования колес и блоками трехмерного сканирования рамы и двух перемещаемых вдоль площадки для измерений колонн с блоками трехмерного сканирования колес, согласно изобретению по обоим вариантам.
На фигурах обозначены:
1 - транспортное средство;
2 - колонны с блоками трехмерного сканирования;
3 - специальные метки;
4 - проецируемые световые элементы в виде линий;
5 - модуль проецирования световых меток;
6 - видеокамера блока трехмерного сканирования рамы;
7 - устройство подсветки видеокамер блока трехмерного сканирования рамы;
8 - видеокамера с подсветкой блока трехмерного сканирования рамы
9 - блок трехмерного сканирования рамы;
10 - блок трехмерного сканирования рамы с встроенным модулем проецирования световых меток;
11 - видеокамеры блока трехмерного сканирования колес;
12 - модуль проецирования блока трехмерного сканирования колес;
13 - напольный измерительный модуль с блоками трехмерного сканирования рамы;
14 - напольный измерительный модуль с блоками трехмерного сканирования рамы и модулем проецирования световых меток;
15 - дополнительные колонны с блоками трехмерного сканирования колес;
А - расстояние между стационарными колоннами;
В - расстояние между поворотными колоннами;
L - длина участка регулировки.
Согласно фигурам 1-6, cистемы для бесконтактного измерения и регулировки углов установки колес ТС относительно рамы и системы для бесконтактного измерения геометрии рам транспортных средств, содержат вычислительное устройство (на фигурах не показано) с устройствами ввода/вывода, отображения, распечатки, приема и передачи информации, связанное с одной или множеством пар колонн с блоками трехмерного сканирования и/или напольных измерительных модулей.
На фигурах 1в, 2в показано для примера, что блок трехмерного сканирования колес включает в себя отдельно модуль проецирования 12 и две взаимно откалиброванные видеокамеры блока трехмерного сканирования колес 11.
На фигуре 3а, показано для примера, что блок трехмерного сканирования рамы включает в себя две взаимно откалиброванные видеокамеры 6, которые оборудованы устройствами подсветки 7, направленными вдоль осей камер и работающими синхронно с ними.
На фигуре 3в, показаны для примера, блок трехмерного сканирования рамы, состоящий из двух взаимно откалиброванных видеокамер с подсветками 8 и дополнительный модуль проецирования световых меток 5.
Колонны расположены по левой и правой сторонам транспортного средства, симметрично относительно продольной оси площадки для измерений транспортного средства, на расстоянии 3000 - 6000 мм друг относительно друга.
Колонны оснащены блоками трехмерного сканирования колес и блоками трехмерного сканирования рамы, расположенными по двум краям горизонтальных балок, установленных параллельно продольной оси транспортного средства, жестко связанных с корпусом каждой колонны с блоком трехмерного сканирования колес, с двух сторон, относительно вертикальной оси каждой колонны.
Существует вариант системы, в котором в блоках трехмерного сканирования рамы, установлены дополнительные модули проецирования световых меток на раму ТС.
Другой вариант системы содержит по крайней мере одну пару колонн с блоками трехмерного сканирования колес, а также напольный измерительный модуль с двумя блоками трехмерного сканирования рамы,
Существует альтернативный вариант системы, который содержит по крайней мере одну пару колонн с блоками трехмерного сканирования колес, а также напольный измерительный модуль с двумя блоками трехмерного сканирования рамы, в которых установлены дополнительные модули проецирования световых меток на раму ТС.
Блоки трехмерного сканирования в каждой паре колонн направлены в сторону колес транспортного средства, перпендикулярно к продольной оси площадки для измерений.
Напольные измерительные модули, оборудованы, по крайней мере, двумя блоками трехмерного сканирования рамы.
Напольные измерительные модули расположены вдоль продольной оси площадки для измерений, на уровне пола или в ремонтном канале,
Блоки трехмерного сканирования рамы напольных измерительных модулей направлены под углом вверх к раме транспортного средства.
На фигурах 1а, 1в 2а, 2в, представлены системы, позволяющие производить сканирование поверхностей колес и рамы одновременно. Системы содержат вычислительное устройство с устройствами ввода/вывода, отображения, распечатки, приема и передачи информации (не показаны), пару колонн фигура 1а, с блоком трехмерного сканирования колес, содержащим видеокамеры 11 модуля сканирования и модуль проецирования 12. На каждую из колонн установлены балки, жестко связанные с корпусом колонн, оснащенные двумя блоками трехмерного сканирования рамы 9. Блоки трехмерного сканирования рамы расположены симметрично, на определенном расстоянии по краям балки, с двух сторон относительно вертикальной оси колонн и направлены в сторону ТС. Колонны с блоками трехмерного сканирования расположены по левой и правой стороне ТС симметрично относительно продольной оси площадки для измерений (ТС), на расстоянии 3000 - 6000 мм друг относительно друга. Блоки трехмерного сканирования колонн направлены в сторону колес ТС, перпендикулярно к продольной оси площадки для измерений, т.е. друг к другу. В системе, представленной на фигуре 1а, 2а, сканирование рамы осуществляется с помощью меток с геометрическими фигурами, предварительно установленные на вертикальную поверхность рамы, слева и справа относительно каждого колеса по обеим сторонам ТС. Метки допустимо печатать на бумажных или других носителях и устанавливать на поверхность рамы с помощью клея, магнитов или наносить их на поверхность любым другим способом. В альтернативном устройстве, представленном на рис 1в, 2в, сканирование рамы осуществляется с помощью блоков трехмерного сканирования рамы и модулей проецирования световых меток 10, которые проецируют как минимум одну линию 4, одну точку или несколько точек на вертикальную поверхность рамы, слева и справа относительно каждого колеса по обеим сторонам ТС. Для каждой оси ТС, при одновременном сканировании, вычисляются положение в пространстве продольной линии рамы, а также положение каждого из колес данной оси и положение самой оси относительно продольной линии рамы. Все блоки трехмерного сканирования взаимно откалиброваны и работают одновременно. Данные системы позволяют производить измерение углов установки колес ТС относительно линии рамы, во время остановки каждой оси на линии между колоннами или при его проезде на малой скорости.
На фигуре 3а представлен напольный измерительный, состоящий из по крайней мере двух блоков трехмерного сканирования рамы 9, видеокамеры которых оборудованы устройствами подсветки 7, направленными вдоль осей камер и работающими синхронно с ними.
Система содержит вычислительное устройство с устройствами ввода/вывода, отображения, распечатки, приема и передачи информации (не показаны), напольный измерительный модуль с блоками трехмерного сканирования рамы, которые работают совместно с по крайней мере одной пары колонн с блоками трехмерного сканирования колес. Их взаимное расположение представлено на фигуре. 4а, 4в, 4с. Колонны с блоками трехмерного сканирования колес расположены по левой и правой сторонам ТС симметрично относительно продольной центральной вертикальной плоскости площадки для измерений (ТС), на расстоянии 3000-6000 мм друг относительно друга. Напольный измерительный модуль с блоками трехмерного сканирования рамы, расположен на линии между колоннами, по середине, на пересечении этой линии с продольной центральной вертикальной плоскостью площадки для измерений, на уровне пола или в ремонтном канале. Один блок трехмерного сканирования рамы напольного измерительного модуля направлен под углом вверх вдоль направления движения ТС, а второй, под примерно тем же углом, против его направления движения (фигура 4с). На нижней поверхности рамы устанавливаются хотя бы четыре метки, которые позиционируются единообразно относительно закраин нижних поверхностей рамы (фигура 5а). Хотя бы две метки располагаются на участке рамы, на левом и правом швеллерах, перед измеряемой осью ТС, и хотя бы две метки на участке после нее в зоне видимости блоков трехмерного сканирования рамы, напольного измерительного модуля. Блоки трехмерного сканирования рамы передают изображения от камер на центральное вычислительное устройство, которое определяет координаты хотя бы двух поперечных сечений рамы, расположенных до и после каждой оси ТС, в момент сканирования, определяемый блоками трехмерного сканирования колес колонн по колесам ТС, и вычисляет положение ее продольной линии в общей координатной системе.
На фигуре 6а представлен вариант вышеуказанной системы, в котором дополнительно установлено множество пар колонн с блоками трехмерного сканирования колес, а напольный измерительный модуль расположен посередине между первыми колоннами со стороны заезда ТС в зону измерений. Количество колонн определяется, исходя из необходимой длины участка измерений, размерами колес транспортных средств, обслуживаемых на данном участке и зоны видимости сканирующих устройств в горизонтальном направлении. Все колонны с блоками трехмерного сканирования колес взаимно откалиброваны известными методами с помощью мишеней (2). Данная система предназначена для пунктов, в которых проводятся измерения разных по длине и конфигурации осей ТС.
На фигуре 6в представлен альтернативный вариант вышеуказанной системы, который построен исходя из необходимости оптимизации количества дополнительных пар колонн с блоками трехмерного сканирования колес. Данный вариант предполагает использование колонн, поворачивающихся вокруг своей вертикальной оси на углы +/- 20 градусов, и обладающих за счет этого увеличенной зоной обзора. Расширение зоны обзора получается в результате сканирования в двух крайних положениях поворота каждой колонны. Для контроля положения поворотных колонн они содержат мишени, а первая неподвижная пара колонн содержит дополнительные референтные камеры, направленные вдоль площадки для измерений в сторону мишеней поворотных колонн. Указанные референтные камеры и блоки трехмерного сканирования колес первой пары колонн взаимно откалиброваны. Блоки трехмерного сканирования колес первой пары колонн и блоки трехмерного сканирования меток или блоки трехмерного сканирования рамы напольного измерительного модуля взаимно откалиброваны. Блоки трехмерного сканирования колес и мишени поворотных колонн взаимно откалиброваны. Относительное перемещение мишеней пересчитывается в текущее положение блоков трехмерного сканирования поворотных колонн относительно глобальной системы координат, связанной с первой парой колонн. Расстояния между поворотными колоннами определяются индивидуально для каждого пункта регулировки, исходя из зон видимости камер с учетом их поворота, геометрических параметров и конфигураций ТС, обслуживаемых в каждом конкретном пункте.
На фигуре 6с представлен другой вариант вышеуказанной системы, который построен, исходя из необходимости использовать минимальное количество дополнительных пар колонн с блоками трехмерного сканирования колес. Данный вариант предполагает использование двух дополнительных перемещаемых вдоль продольной центральной линией площадки для измерений колонн с блоками трехмерного сканирования колес.
В системах, представленных на фигурах 6а, 6в и 6с, вычислительное устройство сопоставляет данные о положениях линии рамы, вычисленные по изображениям от блоков трехмерного сканирования рамы и данные о положениях колес, вычисленные по изображениям, получаемые от блоков трехмерного сканирования колес первой со стороны заезда пары колонн, во время остановки каждой оси ТС на линии между этими колоннами, определяя таким образом, всех параметров установки колес, по каждой оси, относительно линии рамы ТС. Впоследствии, используя эту информацию, возможно отрегулировать каждую ось ТС на необходимую величину, отслеживая в реальном времени только положение колес ТС, по изображениям от блоков трехмерного сканирования колес дополнительных колонн.
На фигуре 3в представлен напольный измерительный модуль с двумя блоками трехмерного сканирования рамы, каждый из которых состоит из двух взаимно откалиброванных видеокамер с подсветками 8 и модулем проецирования световых меток 5, который проецирует структурированный свет на раму ТС. Система, основанная на базе напольного измерительного модуля, представленного на фиг.3в, содержит вычислительное устройство с устройствами ввода/вывода, отображения, распечатки, приема и передачи информации (не показаны), напольный измерительный модуль с блоками трехмерного сканирования рамы, и модулями проецирования световых меток, которые работают совместно с по крайней мере одной пары колонн с блоком трехмерного сканирования колес. Их взаимное расположение представлено на фигурах. 4а, 4в, 4с. Колонны с блоками трехмерного сканирования колес расположены по левой и правой сторонам ТС симметрично относительно продольной оси площадки для измерений ТС, на расстоянии 3000 - 6000 мм друг относительно друга. Напольный измерительный модуль расположен на линии между колоннами, по середине, на пересечении этой линии с продольной центральной вертикальной плоскости площадки для измерений, на уровне пола или в ремонтном канале. Один блок трехмерного сканирования рамы и один модуль проецирования световых меток напольного измерительного модуля направлены под углом вверх вдоль направления движения ТС, а вторые - под примерно тем же углом против его направления движения (фигура 4с). Блоки трехмерного сканирования колес колонн направлены в сторону колес ТС, перпендикулярно к продольной центральной вертикальной плоскости площадки для измерений, т.е. направлены друг к другу. Все блоки трехмерного сканирования рамы напольного измерительного модуля и блоки трехмерного сканирования колонн взаимно откалиброваны известными способами с помощью мишеней. Блоки трехмерного сканирования рамы напольного измерительного модуля передают изображения на центральное вычислительное устройство, которое определяет координаты хотя бы двух поперечных сечений рамы, расположенных до и после каждой оси ТС (фигура 5в), и вычисляет положение ее продольной линии в общей координатной системе. Синхронно со сканированием поперечных сечений рамы, при помощи блоков трехмерного сканирования колес определяется положение соответствующей оси ТС, проходящей через центры измеряемых колес.
Возможны варианты работы вышеуказанной системы совместно с дополнительными парами колонн, согласно фиг 6а, 6в, 6с, описание которых было представлено выше.
Альтернативная система (не показана) отличается тем, что модули проецирования световых меток 5 напольных измерительных модулей (фиг. 3в) оборудованы программно-управляемыми механизмами поворота в вертикальной плоскости.
Промышленная применимость.
В соответствии с предложенным изобретением изготовлены опытные образцы систем, представленных на фиг. 1а, 1в, 2а, 2в, 3a.
Системы, представленные на фиг. 2а, 2в, 6а, 6в, 6с, идеально подходят для организации поста измерений многоосных ТС с разной конфигурацией осей, во время любого их заезда в зону ремонта для обслуживания или пред-выездного технического контроля.
Эффект от применения данного изобретения может состоять в том, что:
- позволяет построение систем для измерения и регулировки многоосных ТС, относительно линии рамы
- предоставляет возможность построения гибких решений под условия конкретного автосервиса,
- системы являются бесконтактными, поэтому исключают любое повреждение колес и раму ТС в процессе измерения,
- достигается существенный экономический эффект использования системы, благодаря исключению механических операций установки измерительных приспособлений на колеса и раму ТС, следствием чего является повышение пропускной способности участка измерения и регулировки,
- минимизируется время одного измерения, что позволяет организовать массовый регулярный контроль исправности ТС, например, для крупных автосервисов или автопарков, что повышает безопасность дорожного движения и снижает вероятность преждевременного износа шин.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И СИСТЕМА ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ГЕОМЕТРИЧЕСКОГО ПОЛОЖЕНИЯ КОЛЕС ТРАНСПОРТНОГО СРЕДСТВА ПО ДАННЫМ ТРЕХМЕРНОГО СКАНИРОВАНИЯ ПОВЕРХНОСТЕЙ КОЛЕС ТРАНСПОРТНОГО СРЕДСТВА | 2020 |
|
RU2754961C1 |
| УСТРОЙСТВО ДЛЯ БЕСКОНТАКТНОГО ИЗМЕРЕНИЯ ОБЪЕМА ДВИЖУЩЕГОСЯ ГРУЗА, ИМЕЮЩЕГО СЛОЖНУЮ ГЕОМЕТРИЧЕСКУЮ ФОРМУ | 2020 |
|
RU2734085C1 |
| СПОСОБ ОСУЩЕСТВЛЕНИЯ МОНИТОРИНГА УЛИЧНО-ДОРОЖНОЙ СЕТИ ПОСРЕДСТВОМ ПЕРЕДВИЖНОЙ ДОРОЖНОЙ ЛАБОРАТОРИИ И ФУНКЦИОНАЛЬНЫЙ КОМПЛЕКС ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2373325C1 |
| УСТРОЙСТВО ДЛЯ ЛАЗЕРНОГО СКАНИРОВАНИЯ КОЛЕСНОЙ ПАРЫ ДВИЖУЩЕГОСЯ ЛОКОМОТИВА | 2022 |
|
RU2794231C1 |
| Способ определения объема сыпучих грузов в движущемся транспортном средстве с использованием бесконтактного измерения | 2021 |
|
RU2772138C1 |
| СПОСОБ ИЗМЕРЕНИЯ ГЕОМЕТРИЧЕСКИХ ПАРАМЕТРОВ И/ИЛИ ДЕФОРМАЦИЙ ОБРАЗЦА ПРИ ВЫСОКОТЕМПЕРАТУРНОМ ВОЗДЕЙСТВИИ НА НЕГО И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2017 |
|
RU2665323C1 |
| СПОСОБ ОСУЩЕСТВЛЕНИЯ МОНИТОРИНГА УЛИЧНО-ДОРОЖНОЙ СЕТИ ПОСРЕДСТВОМ ПЕРЕДВИЖНОЙ ДОРОЖНОЙ ЛАБОРАТОРИИ И ФУНКЦИОНАЛЬНЫЙ КОМПЛЕКС ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2373324C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УГЛА НАБЕГАНИЯ НА РЕЛЬС КОЛЕС ПОДВИЖНЫХ ЕДИНИЦ | 1999 |
|
RU2172267C2 |
| СПОСОБ БЕСКОНТАКТНОГО ИЗМЕРЕНИЯ ТОПОГРАФИИ ПОВЕРХНОСТИ ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2208370C2 |
| СПОСОБ ЛАЗЕРНОГО СКАНИРОВАНИЯ КОЛЕСНОЙ ПАРЫ ДВИЖУЩЕГОСЯ ЛОКОМОТИВА | 2022 |
|
RU2794230C1 |

Изобретение относится к системам для вычисления параметров геометрического положения колес транспортных средств по данным трехмерного сканирования поверхностей колес и рамы. Трехмерное сканирование поверхностей колес и рамы осуществляется бесконтактным методом, с помощью блоков трехмерного сканирования и отображаемых на транспортном средстве световых элементов, при котором на его колеса и раму проецируют ряд световых элементов, снимают подсвеченные колеса, а также раму и передают полученные изображения на вычислительное устройство, которое осуществляет расчет необходимых параметров. Альтернативные системы для сканирования рамы транспортных средств отличаются типом используемых блоков трехмерного сканирования, которые определяют пространственное положение меток с градиентным рисунком или голографических меток, устанавливаемых на раму транспортного средства. Технический результат – быстрое и точное, бесконтактное измерение ключевых параметров колес и осей многоосных транспортных средств относительно центральной линии их рамы, а также диагностика наличия механических деформаций рамы и метрологическое сопровождение процесса их устранения. 2 н. и 9 з.п. ф-лы, 6 ил.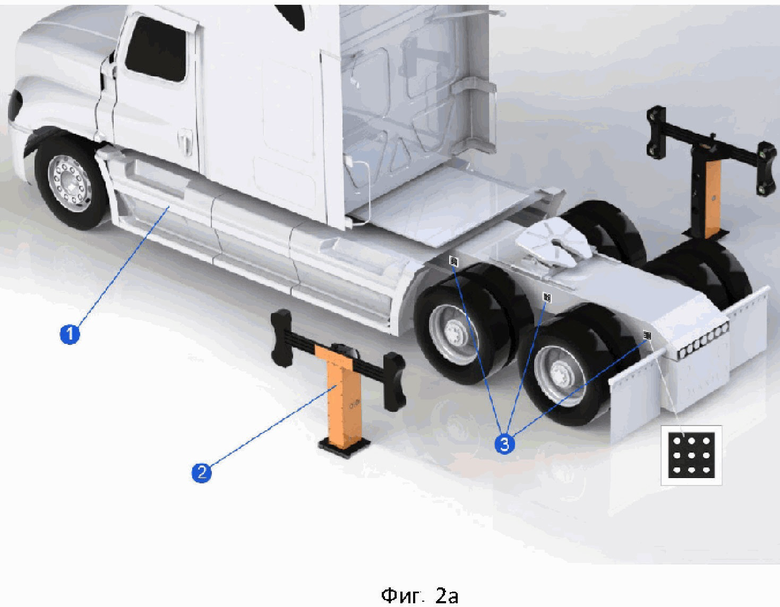
1. Система для бесконтактного измерения и регулировки углов установки колес транспортных средств относительно рамы, в которой содержится
вычислительное устройство с устройствами ввода/вывода, отображения, распечатки, приема и передачи информации, отличающаяся тем, что вычислительное устройство соединено с
двумя блоками трехмерного сканирования колес транспортного средства, расположенными в двух колоннах по одному в каждой колонне, а также с
четырьмя блоками трехмерного сканирования рамы транспортного средства, расположенными по два с двух сторон относительно каждой колонны с блоками трехмерного сканирования колес, в направлении продольной центральной линии площадки для измерений, жестко связанными с корпусом каждой колонны с блоком трехмерного сканирования колес, и выполненными с возможностью сканирования по крайней мере, одной метки, расположенной на раме транспортного средства, причем
колонны расположены по левой и правой сторонам транспортного средства, симметрично относительно продольной центральной вертикальной плоскости площадки для измерений транспортного средства, на расстоянии 3000-6000 мм друг относительно друга, при этом
блоки трехмерного сканирования колес и рамы в каждой колонне направлены в сторону колес и рамы транспортного средства, перпендикулярно к продольной центральной вертикальной плоскости площадки для измерений,
блоки трехмерного сканирования колес и рамы взаимно откалиброваны.
2. Система по п.1, отличающаяся тем, что в блоках трехмерного сканирования рамы установлены дополнительные модули проецирования световых меток на раму транспортного средства.
3. Система для бесконтактного измерения и регулировки углов установки колес транспортных средств относительно рамы, в которой содержится
вычислительное устройство с устройствами ввода/вывода, отображения, распечатки, приема и передачи информации, отличающаяся тем, что вычислительное устройство соединено с
по крайней мере двумя блоками трехмерного сканирования колес, расположенными в двух колоннах, а также
с двумя блоками трехмерного сканирования рамы, расположенными в напольном измерительном модуле и выполненными с возможностью сканирования по крайней мере одной метки, расположенной на раме транспортного средства, причем
колонны расположены по левой и правой сторонам транспортного средства, симметрично относительно продольной центральной вертикальной плоскости площадки для измерений транспортного средства, на расстоянии 3000-6000 мм друг относительно друга, при этом
блоки трехмерного сканирования колес в каждой колонне направлены в сторону колес транспортного средства, перпендикулярно к продольной центральной вертикальной плоскости площадки для измерений,
напольный измерительный модуль расположен на линии между колоннами, посередине, на пересечении этой линии с продольной центральной вертикальной плоскостью площадки для измерений, на уровне пола или в ремонтном канале, причем
один блок трехмерного сканирования рамы, напольного измерительного модуля, направлен под углом вверх вдоль направления движения транспортного средства, а второй – против его направления движения,
блоки трехмерного сканирования колес, расположенные в колоннах, и блоки трехмерного сканирования рамы напольного измерительного модуля взаимно откалиброваны.
4. Система по п.3, отличающаяся тем, что в блоках трехмерного сканирования рамы установлены дополнительные модули проецирования световых меток на раму транспортного средства.
5. Система по п.4, отличающаяся тем, что дополнительные модули проецирования световых меток на раму транспортного средства оборудованы программно-управляемыми механизмами поворота в вертикальной плоскости.
6. Система по п.1, отличающаяся тем, что содержит множество дополнительных пар колонн с блоками трехмерного сканирования колес, при этом
блоки трехмерного сканирования колес в каждой дополнительной паре колонн направлены в сторону колес транспортного средства, перпендикулярно к продольной центральной вертикальной плоскости площадки для измерений, а
расстояния между отдельными парами колонн с блоками трехмерного сканирования колес в направлении продольной центральной линии площадки для измерений транспортного средства выбраны таким образом, чтобы обеспечивалось частичное перекрытие зон видимости смежных блоков трехмерного сканирования колес в направлении продольной центральной линии площадки для измерений,
все блоки трехмерного сканирования колес взаимно откалиброваны,
количество дополнительных пар колонн с блоками трехмерного сканирования колес определяется исходя из необходимой длины площадки для измерений и размеров зон видимости блоков трехмерного сканирования колес,
вычислительное устройство выполнено с возможностью объединения всех данных, вычисляемых при помощи блоков трехмерного сканирования колес, обеспечивая, таким образом, одновременное измерение всех колес транспортного средства, находящегося в зоне измерения, вне зависимости от их взаимного расположения и местонахождения в ее пределах.
7. Система по п.1, отличающаяся тем, что колонны с блоками трехмерного сканирования колес содержат дополнительные референтные камеры, взаимно откалиброванные с блоками трехмерного сканирования колес каждой колонны и направленные вдоль площадки для измерений, а также включены
дополнительные пары колонн с блоками трехмерного сканирования колес, выполненные с возможностью их поворота вокруг своей вертикальной центральной оси на углы в пределах ±20°, содержащие мишени, взаимно откалиброванные с блоками трехмерного сканирования колес и направленные в сторону референтных камер колонн с блоками трехмерного сканирования колес, при этом
блоки трехмерного сканирования колес в каждой дополнительной паре колонн направлены в сторону колес транспортного средства, перпендикулярно к продольной центральной вертикальной плоскости площадки для измерений, а
расстояния между отдельными дополнительными парами колонн с блоками трехмерного сканирования колес в направлении продольной центральной линии площадки для измерений транспортного средства выбраны таким образом, чтобы обеспечивалось частичное перекрытие зон видимости смежных блоков трехмерного сканирования колес в направлении продольной центральной линии площадки для измерений, с учетом максимальных углов поворота колонн,
количество дополнительных пар колонн с блоками трехмерного сканирования колес определяется исходя из необходимой длины площадки для измерений и размеров зон видимости блоков трехмерного сканирования колес,
вычислительное устройство выполнено с возможностью объединения всех данных, вычисляемых при помощи блоков трехмерного сканирования колес, обеспечивая, таким образом, одновременное измерение всех колес транспортного средства, находящегося в зоне измерения, вне зависимости от их взаимного расположения и местонахождения в ее пределах.
8. Система по п.1, отличающаяся тем, что колонны с блоками трехмерного сканирования колес содержат дополнительные референтные камеры, взаимно откалиброванные с блоками трехмерного сканирования колес каждой колонны и направленные вдоль площадки для измерений, а также включены
две дополнительные колонны с блоками трехмерного сканирования колес, содержащие мишени, взаимно откалиброванные с блоками трехмерного сканирования колес и направленные в сторону референтных камер колонн с блоками трехмерного сканирования колес, при этом
дополнительные колонны расположены по левой и правой сторонам транспортного средства, симметрично относительно продольной центральной вертикальной плоскости площадки для измерений, на расстоянии 3000-6000 мм друг относительно друга, и выполнены с возможностью перемещения в направлении продольной центральной линии площадки для измерений, при этом
блоки трехмерного сканирования колес в каждой колонне направлены в сторону колес транспортного средства, перпендикулярно к продольной центральной вертикальной плоскости площадки для измерений.
9. Система по п.3, отличающаяся тем, что содержит множество дополнительных пар колонн с блоками трехмерного сканирования колес, при этом
блоки трехмерного сканирования колес в каждой дополнительной паре колонн направлены в сторону колес транспортного средства, перпендикулярно к продольной центральной вертикальной плоскости площадки для измерений, а
расстояния между отдельными парами колонн с блоками трехмерного сканирования колес в направлении продольной центральной линии площадки для измерений транспортного средства выбраны таким образом, чтобы обеспечивалось частичное перекрытие зон видимости смежных блоков трехмерного сканирования колес в направлении продольной центральной линии площадки для измерений,
все блоки трехмерного сканирования колес взаимно откалиброваны,
количество дополнительных пар колонн с блоками трехмерного сканирования колес определяется исходя из необходимой длины площадки для измерений и размеров зон видимости блоков трехмерного сканирования колес,
вычислительное устройство выполнено с возможностью объединения всех данных, вычисляемых при помощи блоков трехмерного сканирования колес, обеспечивая, таким образом, одновременное измерение всех колес транспортного средства, находящегося в зоне измерения, вне зависимости от их взаимного расположения и местонахождения в ее пределах.
10. Система по п.3, отличающаяся тем, что колонны с блоками трехмерного сканирования колес содержат дополнительные референтные камеры, взаимно откалиброванные с блоками трехмерного сканирования колес каждой колонны и направленные вдоль площадки для измерений, а также включены
дополнительные пары колонн с блоками трехмерного сканирования колес, выполненные с возможностью их поворота вокруг своей вертикальной центральной оси на углы в пределах ±20°, содержащие мишени, взаимно откалиброванные с блоками трехмерного сканирования колес и направленные в сторону референтных камер колонн с блоками трехмерного сканирования колес, при этом
блоки трехмерного сканирования колес в каждой дополнительной паре колонн направлены в сторону колес транспортного средства, перпендикулярно к продольной центральной вертикальной плоскости площадки для измерений, а
расстояния между отдельными дополнительными парами колонн с блоками трехмерного сканирования колес в направлении продольной центральной линии площадки для измерений транспортного средства выбраны таким образом, чтобы обеспечивалось частичное перекрытие зон видимости смежных блоков трехмерного сканирования колес в направлении продольной центральной линии площадки для измерений, с учетом максимальных углов поворота колонн,
количество дополнительных пар колонн с блоками трехмерного сканирования колес определяется исходя из необходимой длины площадки для измерений и размеров зон видимости блоков трехмерного сканирования колес,
вычислительное устройство выполнено с возможностью объединения всех данных, вычисляемых при помощи блоков трехмерного сканирования колес, обеспечивая, таким образом, одновременное измерение всех колес транспортного средства, находящегося в зоне измерения, вне зависимости от их взаимного расположения и местонахождения в ее пределах.
11. Система по п.3, отличающаяся тем, что колонны с блоками трехмерного сканирования колес содержат дополнительные референтные камеры, взаимно откалиброванные с блоками трехмерного сканирования колес каждой колонны и направленные вдоль площадки для измерений, а также включены
две дополнительные колонны с блоками трехмерного сканирования колес, содержащие мишени, взаимно откалиброванные с блоками трехмерного сканирования колес и направленные в сторону референтных камер колонн с блоками трехмерного сканирования колес, при этом
дополнительные колонны расположены по левой и правой сторонам транспортного средства, симметрично относительно продольной центральной вертикальной плоскости площадки для измерений, на расстоянии 3000-6000 мм друг относительно друга, и выполнены с возможностью перемещения в направлении продольной центральной линии площадки для измерений, при этом
блоки трехмерного сканирования колес в каждой колонне направлены в сторону колес транспортного средства, перпендикулярно к продольной центральной вертикальной плоскости площадки для измерений.
| УСТРОЙСТВО ДЛЯ РЕГУЛИРОВКИ УГЛА СХОЖДЕНИЯ УПРАВЛЯЕМЫХ КОЛЕС АВТОМОБИЛЯ | 1991 |
|
RU2006812C1 |
| Приводное устройство к сеялкам квадратно-гнездового посева | 1955 |
|
SU102357A1 |
| СПОСОБ И УСТАНОВКА ДЛЯ ИЗМЕРЕНИЯ И КОНТРОЛЯ РАМЫ ТРАНСПОРТНОГО СРЕДСТВА | 2011 |
|
RU2573689C2 |
| KR 2012003710 U, 30.05.2012 | |||
| WO 2014117870 A1, 07.08.2014 | |||
| US 10527525 B2, 07.01.2020 | |||
| CN 202956278 U, 29.05.2013. | |||

